Изобретение относится к военной технике, в частности к оружию противовоздушной обороны.
Известны системы управления ракетой самоходных зенитных комплексов "Оса-АКМ", "Роланд", "Кроталь".
Эти системы управления ракетой содержат размещенные на одном самоходном шасси средства автосопровождения цели и ракеты. Зенитные управляемые ракеты снабжены радиоблоком, автопилотом и органами управления. Пусковые установки на указанных комплексах имеют общие оси вращения по азимуту со средствами автосопровождения цели, и их направляющие ориентированы по углу места близко к направлению линии визирования цели. При этих условиях системы управления ракетой обеспечивают минимальную дальность поражения в пределах 1-2 км, однако боезапас ракет, размещаемых на пусковой установке, не превышает 6 шт.
Из известных систем управления ракетой наиболее близкой является система комплекса "Оса-АКМ", блок-схема которой представлена на фиг. 1. Она содержит радиолокатор 1 сопровождения цели, на котором подвижно установлен радиолокатор 2 сопровождения радиоответчика, включающий антенну 3, приемник 4, следящие системы 5, имеющие ограниченные углы поворота, и передатчик 6 запросных сигналов и команд на ракету, снабженную последовательно соединенными приемником 7, дешифратором 8, автопилотом 9 и органами управления 10, радиоответчиком 11, подключенным к дешифратору.
Ракета до начала радиоуправления совершает полет по баллистической траектории. Поэтому чтобы обеспечить малую дальность до ближней границы зоны поражения, постоянный угол возвышения накладывает конструктивные и компановочные ограничения на количество ракет,размещаемых на пусковой установке комплекса. Увеличить боезапас при наклонном старте не удается.
Недостатком прототипа является то, что при увеличении боезапаса ракет, размещаемых на пусковой установке комплекса, за счет вертикального расположения ее направляющих система управления ракетой не обеспечит заданную ближнюю границу зоны поражения.
Целью изобретения является обеспечение ближней границы зоны поражения при увеличении боезапаса ракет, размещаемого на пусковой установке самоходного зенитного комплекса, за счет вертикального расположения ее направляющих.
Поставленная цель достигается тем, что в систему управления ракетой, содержащую радиолокатор сопровождения цели, на котором подвижно установлен радиолокатор сопровождения радиоответчика, содержащий антенну, приемник, следящие системы, имеющие ограниченные углы поворота, и передатчик запросных сигналов и команд на ракету, снабженную последовательно соединенными приемником, дешифратором, автопилотом и органами управления, радиоответчиком, подключенным к дешифратору, дополнительно введены вычислитель углов склонения, связанный входом с радиолокатором сопровождения цели, а выходом с запоминающим элементом автопилота ракеты, которая снабжена радиомаяком, соединенные последовательно пеленгатор радиомаяка, определитель рассогласований и коммутатор, при этом радиолокатор сопровождения радиоответчика снабжен устройством расширения диаграммы направленности, соединенным входом с выходом пеленгатора радиомаяка, а определитель рассогласований связан входом с выходом следящих систем радиолокатора сопровождения радиоответчика, подключенных входами через коммутатор к собственному приемнику и к пеленгатору радиомаяка.
Вычислитель углов склонения содержит два канала, каждый из которых состоит из последовательно включенных умножителя и сумматора. При этом первые входы умножителей подключены к датчикам угловых скоростей радиолокатора сопровождения цели, а вторые входы к датчику постоянного сигнала времени автономного полета ракеты, второй и третий входы сумматоров соответственно подключены к датчику угла места (азимуту) радиолокатора сопровождения цели и датчику угла возвышения (угла горизонтального наведения) пусковой установки.
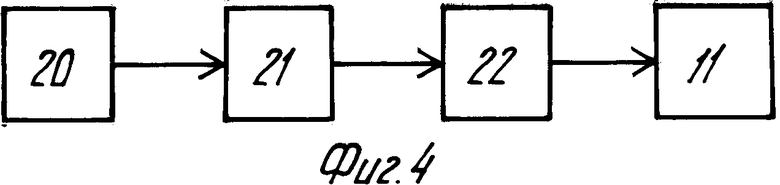
Радиомаяк выполнен в виде последовательно включенных кварцевого генератора, компаратора и делителя частоты, подключенного выходом к блокинг-генератору радиоответчика.
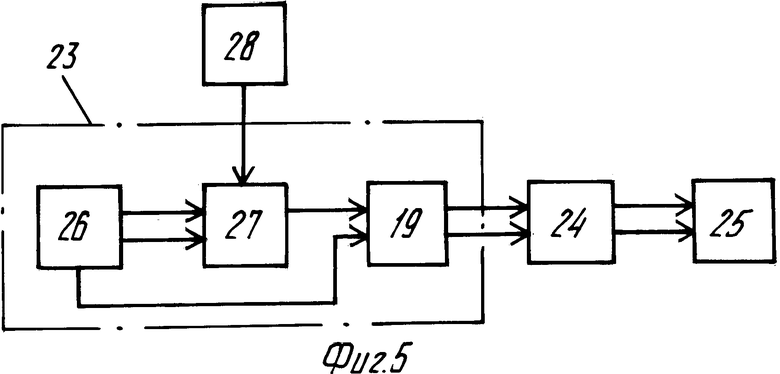
Пеленгатор радиомаяка содержит моноконическую антенноволноводную систему с трехканальным облучателем рупорного типа, подключенным к модулятору и сумматору с помощью коаксиальных кабелей, двухканальный приемник и следящие привода. При этом модулятор антенно-волноводной системы выполнен в виде электронного коммутатора, подключенного к генератору прямоугольных импульсов частоты порядка 100-500 Гц.
Такое построение пеленгатора обеспечивает высокое быстродействие пеленгатора, необходимое для захвата и сопровождения радиомаяка при разворотах продольной оси ракеты на участке автономного полета.
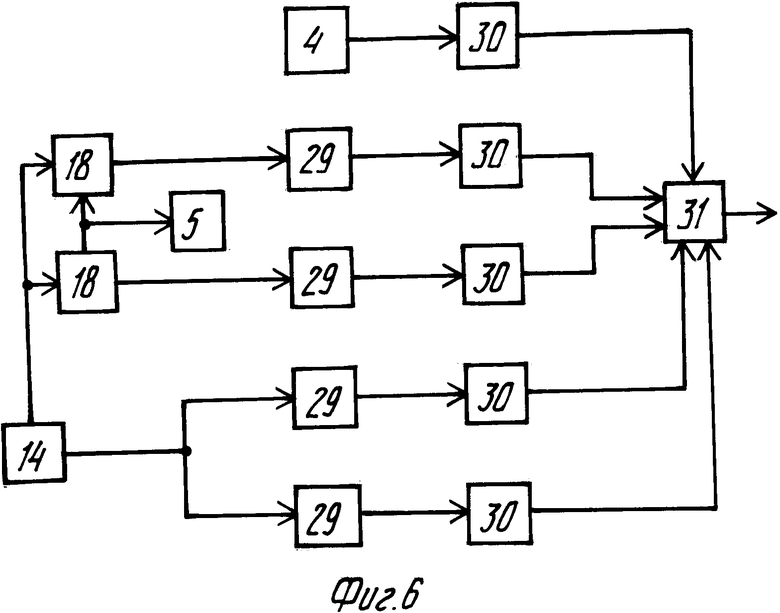
Определитель рассогласований состоит из двух каналов, каждый из которых содержит последовательно соединенные сумматор, определитель модуля и схему сравнения, и подключен к выходной схеме совпадений, связанной третьим входом через схему сравнения с выходом приемника радиолокатора сопровождения радиоответчика. К первым входам сумматоров подключены выходы следящих систем этого радиолокатора, а ко вторым выходы пеленгатора радиомаяка, связанные через последовательно соединенные определитель модуля и схему сравнения с четвертым и пятым входами выходной схемы совпадений.
Антенна радиолокатора сопровождения радиоответчика выполнена в виде малоэлементной физированной решетки (ФАР), нормаль которой совмещена с равносигнальным направлением радиолокатора сопровождения цели.
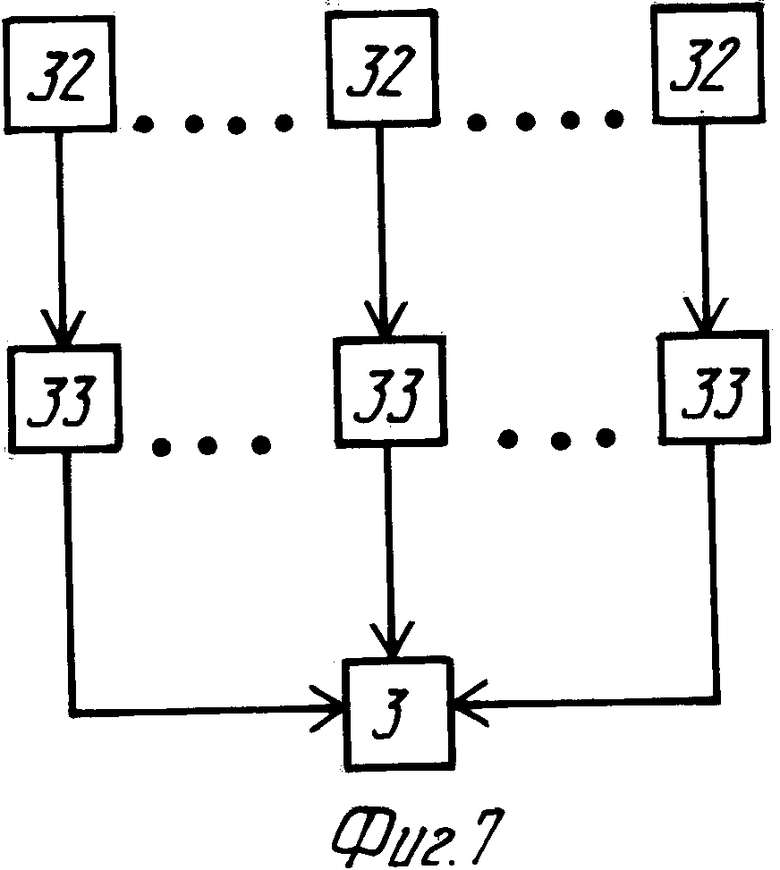
Устройство расширения диаграммы направленности антенны радиолокатора сопровождения радиоответчика содержит набор датчиков постоянных напряжений, подключаемых ко входам усилителей мощности, выходы которых подключены к управляющим обмоткам фазовращателей малоэлементной ФАР. Величины напряжений указанного набора датчиков соответствуют ступенчатой аппроксимации параболической функции, симметричной относительно центрального элемента набора.
Введение вычислителя углов склонения, подключенного к запоминающему элементу автопилота, обеспечивает разворот ракеты до начала радиоуправления относительно поперечных осей так, чтобы направление ее продольной оси было близко к касательной кинематической траектории. При таком положении ракеты в момент начала радиоуправления обеспечивается малая дальность до ближней границы зоны поражения.
Установка на ракете радиомаяка и введение в состав боевой машины пеленгатора этого радиомаяка обеспечивает захват и сопровождение ракеты на этапе автономного полота, пока она находится вне пределов рабочих углов следящих систем радиолокатора сопровождения радиоответчика.
Устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика обеспечивает захват и сопровождение ракеты по дальности и радиоуправление ракетой до вхождения ее в сектор рабочих углов следящих систем радиолокатора сопровождения радиоответчика. Определитель рассогласований и коммутатор обеспечивают выдачу целеуказания радиолокатору сопровождения радиоответчика от пеленгатора радиомаяка и переключение этого радиолокатора на автосопровождение радиоответчика по угловым координатам при вхождении ракеты в сектор физированной антенной решетки при условии допустимых ошибок целеуказания.
Известные системы управления ракетой самоходной зенитных комплексов, если у последних расположить направляющие пусковой установки под постоянными углами возвышения, близкими и равными 90o, не обеспечат ближнюю границу зоны поражения в пределах 1-2 км. Это обстоятельство доказывает наличие критерия "существенные отличия".
На фиг. 2 изображена блок-схема предложенной системы управления ракетой; на фиг. 3 блок-схема вычислителя углов склонения; на фиг.4 блок-схема радиомаяка; на фиг. 5 блок-схема пеленгатора радиомаяка; на фиг. 6 - блок-схема определителя рассогласований; на фиг. 7 блок-схема устройства расширения диаграммы направленности.
На фиг. 2-7 обозначено: 1-11 по прототипу, 12 вычислитель углов склонения, 13 радиомаяк, 14 пеленгатор радиомаяка, 15 определитель рассогласований, 16 коммутатор, 17 устройство управления шириной диаграммы направленности, 18 умножитель, 19 сумматор, 20 кварцевый генератор, 21 - компаратор, 22 делитель частоты, 23 антенно-волноводная система пеленгатора радиомаяка, 24 двухканальный приемник пеленгатора радиомаяка, 25 следящие привода пеленгатора радиомаяка, 26 трехканальный облучатель рупорного типа, 27 модулятор, 28 генератор прямоугольных импульсов, 29 - определитель модуля, 30 схема сравнения, 31 схема совпадений, 32 датчик постоянного напряжения, 33 усилитель мощности, 34 сигнал угла места цели, 35 сигнал азимута цели, 36 угол возвышения пусковой установки, 37 угол горизонтального наведения пусковой установки, 38 время автономного полета ракеты, 39 сигнал скорости угла места цели, 40 сигнал скорости азимута цели.
Предлагаемая система управления ракетой работает следующим образом.
В предстартовый период вырабатываемые вычислителем углов склонения 12 сигналы непрерывно поступают на запоминающий элемент автопилота 9. Сигналы углов склонения, имевшие место в момент старта, фиксируются запоминающим элементом, и на этапе автономного полета с помощью автопилота 9 и органов управления 10 осуществляется разворот корпуса ракеты таким образом, чтобы положение ее продольной оси совпадало с заданным.
Сразу после старта пеленгатор 14 осуществляет захват и сопровождение по угловым координатам радиомаяка 13. Одновременно с этим к усилителям мощности 33 системы управления лучом фазированной антенной решетки 3 радиолокатора 2 подключаются датчики 32 постоянного напряжения, и через широкую диаграмму направленности начинается передача запросных сигналов и прием ответных сигналов радиоответчика 11. Дальномер радиолокатора сопровождения радиоответчика 11 установлен на фиксированном значении дальности. При достижении этого значения ракетой он переходит в режим ее автосопровождения.
При достижении ракетой дальности радиоуправления, определяемой по положению дальномера, начинается передача команд радиоуправления, и происходит отключение автопилота 9 от запоминающего элемента и подключение его к выходу дешифратора 9.
Следящие системы 5 радиолокатора 2 с момента захвата радиомаяка 13 пеленгатором 14 подключены к выходу последнего через коммутатор 16.
При вхождении пеленгатора 14 в сектора работы ФАР усилители мощности 33 отключаются от датчиков 32 устройства расширения диаграммы 17 и подключаются через вычислитель фаз к выходам следящих систем 5. При величинах рассогласования между выходами пеленгатора 14 и следящих систем 5 меньших линейной зоны пеленгационной характеристики радиолокатора 2 и одновременном превышении сигналами на выходе приемника 4 заданного уровня и нахождении пеленгатора 14 внутри рабочего сектора ФАР происходит подключение входов следящих систем 5 к выходам приемника 4, и начинается процесс автосопровождения радиолокатором 2 радиоответчика по угловым координатам.
Примером конкретного выполнения предлагаемой системы управления может служить опытный образец системы управления ракетой боевой машины "Тор". Вычислитель углов склонения 12, следящие системы 5, определитель рассогласований реализованы в виде программ специально вычислительной машины.
Использование предлагаемой системы управления ракетой позволило обеспечить заданную ближнюю границу зоны поражения при увеличении веса боезапаса за счет вертикального расположения направляющих пусковой установки в боевой машине "Тор" по сравнению с "Осой" в 1,7 раза.
В настоящее время изготовлены два опытных образца предлагаемой системы управления ракетой, и проведены испытания системы боевыми стрельбами в объеме программы Совместных испытаний ЗРС "Тор". Испытания подтвердили, что система обеспечивает заданную дальность ближней границы поражения 1-2 км. Серийное производство системы управления ракетой ведется в составе боевой машины "Тор" и "Тор-МI".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| СПОСОБ ПУСКА РАКЕТ ДЛЯ ПОДВИЖНЫХ ПУСКОВЫХ УСТАНОВОК | 2012 |
|
RU2504725C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| РАДИОУПРАВЛЯЕМАЯ ЗЕНИТНАЯ РАКЕТА | 2001 |
|
RU2184343C1 |
| САМОХОДНАЯ БОЕВАЯ МАШИНА ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2121645C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| УСТРОЙСТВО ДЛЯ ПУСКА РАКЕТ | 1981 |
|
RU2121647C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |


Изобретение относится к военной технике, в частности к оружию противовоздушной обороны. Система управления ракетой самоходного зенитного комплекса содержит радиолокатор сопровождения цели, имеющий общую ось вращения по азимуту с пусковой установкой, на котором подвижно установлен радиолокатор сопровождения радиоответчика, включающий антенну, приемник, следящие системы, имеющие ограниченные углы поворота, и передатчик запросных сигналов и команд на ракету, снабженную последовательно соединенными приемником, дешифратором, автопилотом и органами управления, радиоответчиком, подключенным к дешифратору. Дополнительно она содержит вычислитель углов склонения, запоминающий элемент, радиомаяк, пеленгатор радиомаяка, определитель рассогласований, коммутатор и устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика, причем вычислитель углов склонения связан входом с радиолокатором сопровождения цели, а выходом - с запоминающим элементом в автопилоте ракеты, на которой размещен радиомаяк, а пеленгатор радиомаяка, определитель рассогласований и коммутатор соединены последовательно, при этом устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика соединены входом с выходом пеленгатора радиомаяка, а определитель рассогласования связан входом с выходом следящих систем радиолокатора сопровождения радиоответчика, подключенных входами через коммутатор к собственному приемнику и к пеленгатору радиомаяка. 5 з.п. ф-лы, 7 ил.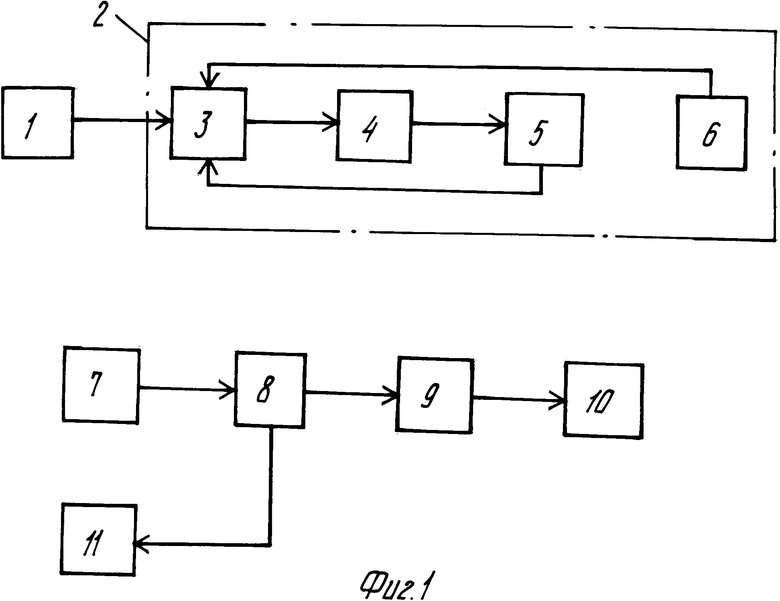
| Техническое описание боевой машины зенитного ракетного комплекса "Оса-АКМ" | |||
| ГП | |||
| ИЭМЗ, г | |||
| Ижевск, 1980. |

