Изобретение относится к области активных воздействий на облака с целью предотвращения градобитий, паводков и селей ливневого происхождения с использованием противоградовых ракет.
Известна противоградовая ракетная пусковая установка (ПУ) ТКБ-040, состоящая из основания с тремя опорными лапами, вертлюга, двух этажерок с закрепленными на них попарно и веерообразно 12 направляющих для противоградовых ракет и выносного пульта ручного запуска ракет [1].
Данные ПУ относятся к ПУ с ручным управлением. Основными недостатком данного типа ПУ при наведении являются:
1) Так как ПУ данного типа не являются дистанционно управляемыми, то для их наведения и перенаведения персоналу, находящемуся в укрытии, приходится каждый раз подбегать к ПУ и вручную перенаводить ее в нужный азимут, а затем бежать обратно в укрытие. Это приводит к снижению темпа стрельбы и создает дополнительные физические нагрузки на персонал.
2) Невозможность сделать полный оборот при наведении по азимуту, так как длина подводящего кабеля на это не рассчитана. К примеру, если установка стоит в азимуте 350° и требуется перенавести ее в азимут 10°, то вместо угла в 20° приходится разворачивать ее на угол 340°, что значительно удлиняет процесс наведения.
3) Установки данного типа имеют ограничение по углу вертикального наведения. Механический ограничитель установлен так, что максимально возможный угол возвышения не может превышать ~85°. Это не позволяют производить наведение по углу места с переходом через 90°, что значительно удлиняет процесс наведения, в случае если требуемое изменение азимута превышает 90°.
Известен также «Комплекс воздействия на облака», состоящий из ПУ «Элия» и центра управления противоградовыми операциями.
ПУ «Элия» состоит из станины цилиндрической формы с четырьмя лапами, механизмов вращения по азимуту и качания по углу места с электроприводами и относительными оптическими датчиками углов поворота, многоярусных пакетов направляющих разной конструкции для ракет разных калибров, унифицированных по габаритам, и пульт дистанционного полуавтоматического управления [2].
Основными недостатками известной ПУ «Элия» является:
- громоздкость и ненадежность пульта дистанционного управления;
- ненадежность системы автоматического управления ПУ по командам из центра управления противоградовыми операциями;
- сложность ориентирования на местности (приходится поворачивать ПУ весом 650 кг, чтобы ее ориентировать на север) из-за недоступности изменения позиции громоздких и примитивных датчиков углового положения в полевых условиях;
- ограничение поворота ПУ по азимуту от 0 до 360 градусов и обратно концевыми выключателями и тормозными устройствами, чтобы исключить перекручивание кабеля к пульту дистанционного управления.
Наиболее близкой по технической сущности к заявляемому объекту является автоматизированная противоградовая ракетная пусковая установка, содержащая опорное устройство, механизмы вращения по азимуту и углу места, сменные пакеты направляющих для пуска противоградовых ракет разных типов, и систему автоматического управления, при этом система управления содержит радиомодем для приема команд от центрального компьютера, подключенный к первому входу управляющей ЭВМ, к одному из выходов которой подключен контроллер управления электроприводами, два выхода которого подключены к блокам управления электроприводами наведения установки по азимуту и углу возвышения, состоящими из двигателей постоянного тока с двухступенчатыми редукторами, на выходных валах которых закреплены абсолютные датчики углового положения, подключенные ко второму и третьему входам управляющей ЭВМ, ко второму выходу которой подключен контроллер пусковых цепей, обеспечивающий контроль наличия ракет в направляющих и выдающий импульс запуска ракет при совпадении кодов азимута и угла возвышения, выданных центральным компьютером и датчиками углового положения, а также блокирующим запуск ракет при сигнале тревоги от системы охранной сигнализации, подключенной к четвертому входу управляющей ЭВМ.
При эксплуатации ПУ в ручном режиме используется система управления, включающая размещенный в пультовой пульт дистанционного управления (ПДУ), который состоит из клавиатуры, контроллера и радиомодема, подключенного к входу всенаправленной антенны для передачи команд управления на ПУ, при этом на ПУ размещены вторая всенаправленная антенна, к выходу которого подключен второй контроллер, к трем выходам которого подключены соответственно привода горизонтального и вертикального наведения и блок управления электрическими цепями пуска ракет. [3] ПРОТОТИП.
Основным недостатком прототипа является то, что механический ограничитель ПУ установлен так, что максимально возможный угол возвышения не может превышать ~ 85°. Это не позволяет производить наведение ПУ по углу места с переходом через 90°, что значительно удлиняет процесс наведения и существенно снижает скорострельность ПУ. Кроме того, из-за невозможности превышения данного угла наведения (~ 85°), над ПУ в пространстве образуется не простреливаемая мертвая зона. Указанные недостатки в комплексе существенно снижают эффективность применения ПУ.
Техническим результатом заявленного технического решения является повышение эффективности применения ПУ и активных воздействий на градовые облака за счет увеличение скорости наведения и скорострельности ПУ, а также исключения образования мертвой зоны в пространстве над ПУ.
Технический результат достигается тем, что в известной автоматизированной противоградовой ракетной пусковой установке, содержащей опорно-поворотного устройство, на котором размещены с возможностью вращения по азимуту и углу места блок направляющих с каналами для размещения ракет, а также систему управления, состоящую из пульта дистанционного управления, состоящего из клавиатуры, контроллера и первого радиомодема для передачи команд управления на ПУ, и размещенных на ПУ второго радиомодема, к выходу которого подключен второй контроллер, к трем выходам которого подключены привода горизонтального и вертикального наведения ПУ, и блок управления электрическими цепями пуска ракет, согласно заявленному изобретению опорно-поворотное устройство выполнено в виде вращающегося вокруг вертикальной оси поворотного стола, на котором размещены две вертикальные опоры, в одной из которых размещен привод вертикального наведения, а во второй - привод горизонтального наведения, при этом между вертикальными опорами размещен блок направляющих, способный вращаться в вертикальной плоскости вокруг горизонтальной оси на 180°, при этом ось вращения блока направляющих размещена по центру тяжести на половину заряженного блока направляющих.
Технический результат достигается и тем, что для упрощения конструкции и уменьшения габаритов ПУ, неподвижное основание выполнено в виде цилиндра, а поворотный стол выполнены в виде квадрата.
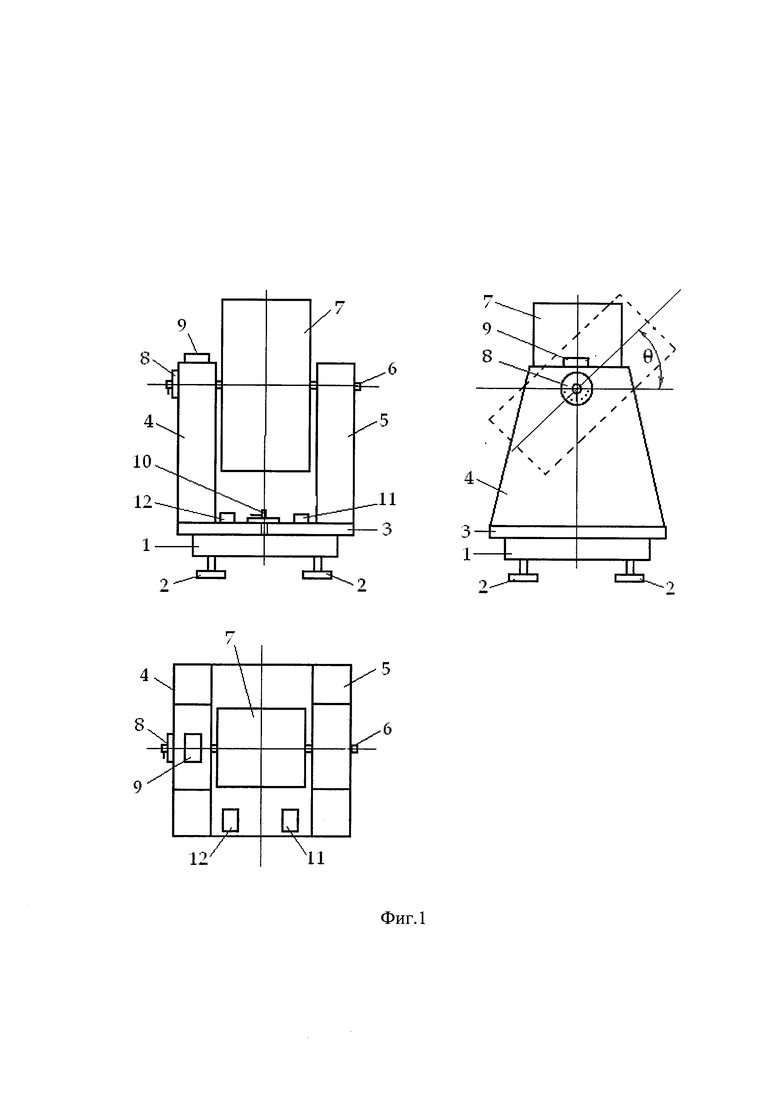
На рисунке (Фиг. 1) приведена принципиальная компоновочная схема автоматизированной противоградовой ПУ.
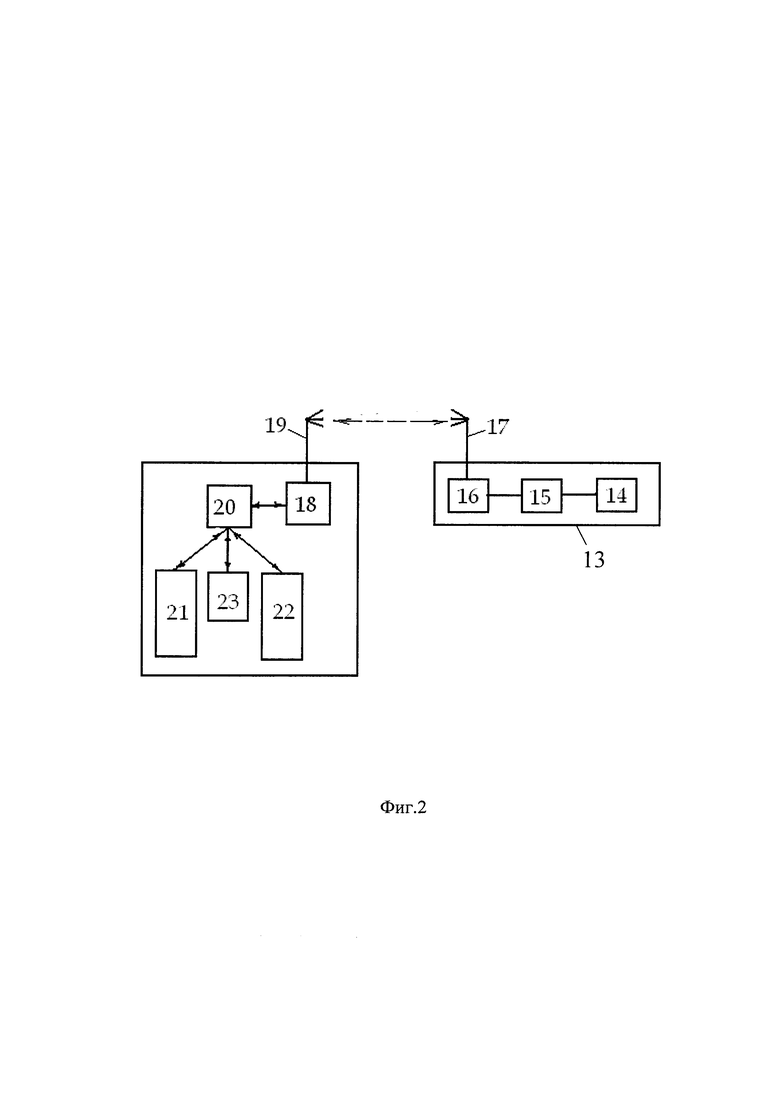
На рисунке (Фиг. 2) приведена блок-схема системы управления ПУ.
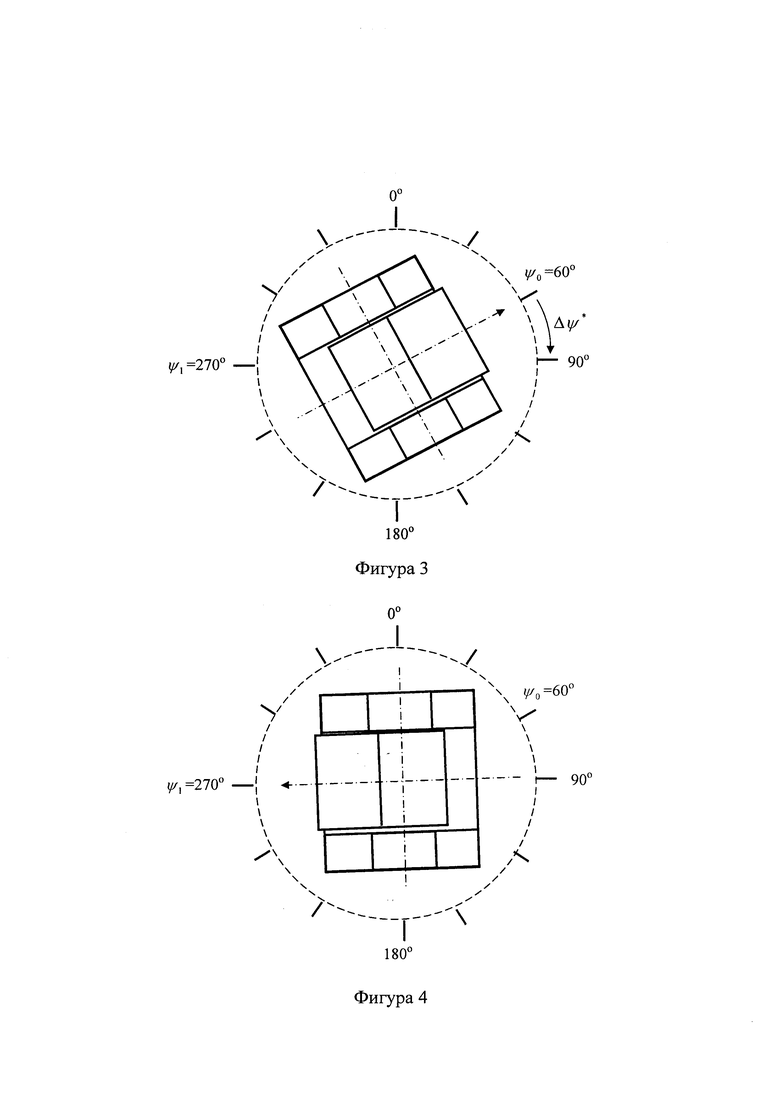
На рисунках (Фиг. 3 и Фиг. 4) приведены схемы исходного и конечного положения ПУ при наведении по азимуту и углу места, соответственно.
ПУ (Фиг. 1) содержит неподвижное основание 1, размещенное на регулируемых по высоте опорных лапах 2. На неподвижном основании 1 размещен поворотный стол квадратной формы 3, на котором размещены опора с электромеханическим приводом наведения ПУ по азимуту 4, опора с приводом наведения ПУ по углу места 5 и блок управления цепями пуска ракет (привода наведения по азимуту и углу места и блок управления цепями пуска ракет на рисунке не показаны. Они схематично представлены на рисунке (Фиг. 2).
На оси 6 между опорами 4 и 5 размещен с возможностью вращения в вертикальной плоскости блок направляющих 7 с каналами для размещения ракет. Для обеспечения удобства при проведении монтажных и пуско-наладочных работ, на конце оси 6, выступающей из опоры 4, размещено шкальное устройство со стрелочным указателем 8 и датчик угла места 9, а у основания поворотного стола 3, на оси неподвижного основания 1, размещено второе шкальное устройство со стрелочным указателем 10 и датчик азимута 11. На поворотном столе 3 размещен также контейнер с источником питания 12. Там же размещены элементы системы управления ПУ, которые на рисунке (Фиг. 1) не показаны. Они схематично представлены на рисунке (Фиг. 2).
Система управления ПУ (Фиг. 2) состоит из пульта дистанционного управления 13, состоящего из клавиатуры 14, первого контроллера 15 и первого радиомодема 16, снабженного всенаправленной антенной 17 для передачи команд управления на ПУ. На ПУ размещен второй радиомодем 18 с всенаправленной антенной 19, к выходу которого подключен второй контроллер 20, управляющие выходы которого, в свою очередь, подключены, соответственно, к электромеханическим приводам наведения ПУ по азимуту 21 и углу места 22, а также к блоку управления цепями пуска ракет 23.
Автоматизированная ракетная пусковая установка работает следующим образом.
1. Команда на запуск ракеты формируется оператором в пультовой, расположенной в нескольких десятках метрах от ПУ. Оператор, получив по рации с командного пункта (на рисунках пункт не показан) необходимые данные по углам пуска ракет, вручную вводит с клавиатуры 14 ПДУ следующую информацию:
- азимут пуска, значение которого лежит в диапазоне 0°≤ψ1≤360°;
- угол места пуска, значение которого лежит в диапазоне 0°≤θ1≤85°;
- номер направляющей, из которой должен производиться пуск ракеты.
2. Команда с клавиатуры 14 поступает в контроллер ПДУ 15, где кодируется, и посредством радиомодема 16, снабженного всенаправленной антенной 17, передается на ПУ.
3. На ПУ команда через вторую всенаправленную антенну 19 принимается радиомодемом 18, после чего поступает в контроллер 20.
4. Наряду с принятой командой, в контроллер ПУ 20 от датчиков 11 и 9 (датчики показаны на рисунке (Фиг. 1) поступает информация о текущем азимуте 0°≤ψ0≤360° и текущем угле места 0°≤θ0≤85°.
5. На основании этой информации, в контроллере 20, размещенном на ПУ, производится вычисление угла горизонтального наведения Δψ по формуле:

и угла вертикального наведения Δθ по формуле:
Δθ=180°-(θ0+θ1).
6. Если Δψ≤90° или 90°<Δψ≤Δθ - наведение происходит по горизонтали и вертикали одновременно по кратчайшему расстоянию. Если Δψ>90° и Δψ>180°-(θ0+θ1) - наведение по горизонтали происходит в длинную сторону на угол Δψ*=180°-Δψ и параллельно происходит наведение по вертикали на угол Δθ=180°-(θ0+θ1), с перебрасыванием пакета направляющих через вертикаль. Выигрыш в скорости наведения при этом составит величину:
7. После того, как контроллер 20 рассчитал требуемые углы, он выдает команду на привод горизонтального наведения 21 и привод вертикального наведения 22.
8. После того, как получаемые от датчиков положения приводов значения текущего азимута и угла места совпадут с азимутом и углом места, переданных в команде, контроллер 20 выдает команду в блок управления цепями пуска ракет 23, откуда происходит подача импульса тока на разъем направляющей, номер которой был указан в команде. Данный импульс тока задействует воспламенитель топливного заряда ракеты, что приводит к ее старту.
Пример работы ПУ при заданных текущих и требуемых углах наведения.
Дано: Текущий азимут ψ0=60°. Текущий угол возвышения θ0=65°.
Требуемый азимут ψ1=270°. Требуемый угол возвышения θ1=65° (Фигура 3).
Определяем угол горизонтального наведения по формуле:

Определяем угол вертикального наведения по формуле:
Δθ=180°-(θ0+θ1)⇒Δθ=50°.
Так как Δψ>90° и Δψ>Δθ, применяем способ наведения с перебрасыванием пакета направляющих. Для его реализации установка разворачивается на угол Δψ*=180°-Δψ=30° по часовой стрелке (Фигура 3) и одновременно с этим пакет направляющих поворачивается в вертикальной плоскости на угол Δθ=180°-(θ0+θ1)=50° с переходом через вертикаль (Фигура 4).
Выигрыш по времени перенаведения, по сравнению с применением обычной схемы (без перебрасывания пакета направляющих через вертикаль), составит:
В нашем случае  что означает, что время наведения ПУ уменьшается практически в три раза в сравнении с прототипом при принятых исходных значениях азимута и угла места.
что означает, что время наведения ПУ уменьшается практически в три раза в сравнении с прототипом при принятых исходных значениях азимута и угла места.
Предлагаемая конструкция автоматизированной ПУ в сравнении с прототипом позволяет существенно повысить эффективность активных воздействий на градовые облака за счет увеличение скорострельности ПУ, а также исключения образования мертвой зоны в пространстве над ПУ.
Источники информации
1. Абшаев М.Т., Клигер Б.А. Методические указания по применению противоградового комплекса «Алазань» для активных воздействий на гидрометеорологические процессы. - Л.: Гидрометеоиздат, 1989. - 57 с.
2. Патент РФ №2276914 от 26.08.2003 // Абшаев М.Т., Кузнецов Б.К., Каиров A.M., Черкашин В.М., Гущин В.Д., Горбушин А.Л.
3. Патент РФ №2370943 от 27.10.2009 // Абшаев A.M., Абшаев М.Т., Кузнецов Б.К. ПРОТОТИП.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ПРОТИВОГРАДОВАЯ РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2370943C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2012 |
|
RU2529043C2 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2021 |
|
RU2766029C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ВОЗДЕЙСТВИЯМИ НА ОБЛАКА | 2002 |
|
RU2213983C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2005 |
|
RU2299556C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2007 |
|
RU2346225C1 |
| КОМПЛЕКС ВОЗДЕЙСТВИЯ НА ОБЛАКА | 2003 |
|
RU2267914C2 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ ЗАЩИТЫ ОТ ГРАДОБИТИЙ | 1995 |
|
RU2075922C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРОТИВОГРАДОВОЙ ЗАЩИТЫ | 1994 |
|
RU2083999C1 |
Изобретение относится к области активных воздействий на облака с целью предотвращения градобитий, паводков и селей ливневого происхождения с использованием противоградовых ракет. Устройство содержит опорно-поворотное устройство, на котором размещен с возможностью вращения по азимуту и углу места блок направляющих с каналами для размещения ракет, а также систему управления ПУ. Система управления включает пульт дистанционного управления, состоящий из клавиатуры, контроллера и первого радиомодема для передачи команд управления на ПУ, и размещенных на ПУ второго радиомодема, к выходу которого подключен второй контроллер, к трем выходам которого подключены приводы горизонтального и вертикального наведения и блок управления электрическими цепями пуска ракет. Опорно-поворотное устройство выполнено в виде вращающегося вокруг вертикальной оси поворотного стола, на котором размещены две вертикальные опоры, в одной из которых размещен привод вертикального наведения, а во второй - привод горизонтального наведения. При этом между вертикальными опорами размещен блок направляющих, способный вращаться в вертикальной плоскости вокруг горизонтальной оси на 180°, при этом ось вращения блока размещена по центру тяжести на половину заряженного блока направляющих. Технический результат заключается в повышении эффективности применения ПУ и активных воздействий на градовые облака за счет увеличение скорости наведения и скорострельности ПУ, а также исключения образования мертвой зоны в пространстве над ПУ. 1 з.п. ф-лы, 4 ил. 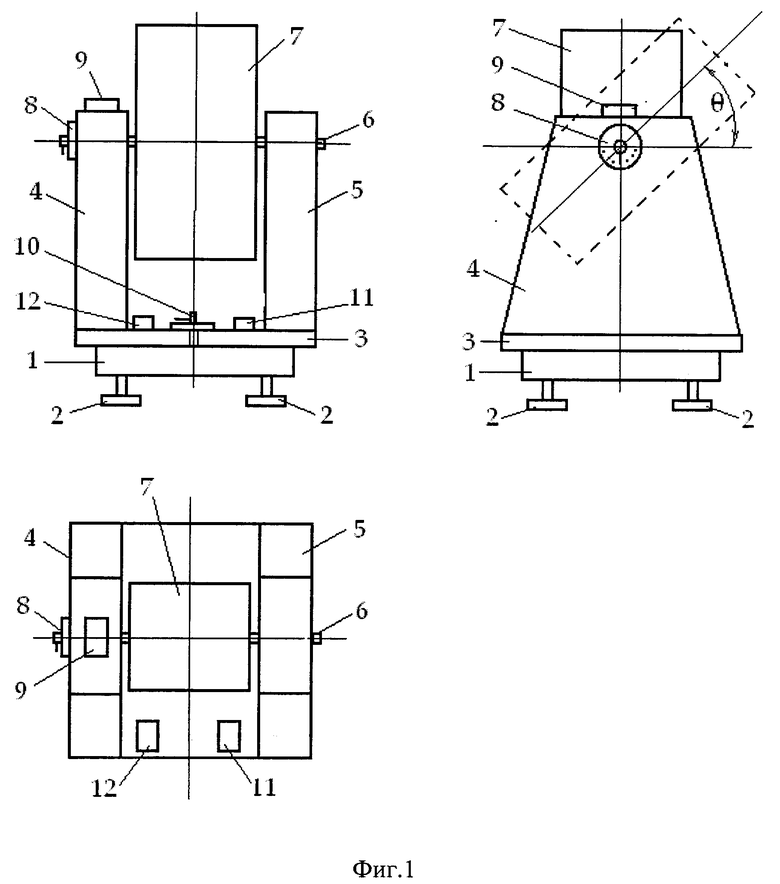
1. Автоматизированная противоградовая ракетная пусковая установка (ПУ), содержащая опорно-поворотное устройство, на котором размещены с возможностью вращения по азимуту и углу возвышения блок направляющих с каналами для размещения ракет, а также систему управления, состоящую из пульта дистанционного управления, состоящего из клавиатуры, контроллера и первого радиомодема для передачи команд управления на ПУ, и размещенных на ПУ второго радиомодема, к выходу которого подключен второй контроллер, к трем выходам которого подключены приводы горизонтального и вертикального наведения ПУ, и электрические цепи пуска ракет, отличающаяся тем, что опорно-поворотное устройство выполнено в виде вращающегося вокруг вертикальной оси поворотного стола, на котором размещены две вертикальные опоры, в одной из которых размещен привод вертикального наведения, а во второй - привод горизонтального наведения, при этом между вертикальными опорами размещен блок направляющих, способный вращаться в вертикальной плоскости вокруг горизонтальной оси на 180°, при этом ось вращения блока направляющих размещена по центру тяжести на половину заряженного блока направляющих.
2. Автоматизированная противоградовая ракетная пусковая установка по п. 1, отличающаяся тем, что для упрощения конструкции и уменьшения габаритов ПУ, неподвижное основание выполнено в виде цилиндра, а поворотный стол выполнен в виде квадрата.
| АВТОМАТИЗИРОВАННАЯ ПРОТИВОГРАДОВАЯ РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2370943C1 |
| КОМПЛЕКС ВОЗДЕЙСТВИЯ НА ОБЛАКА | 2003 |
|
RU2267914C2 |
| US 2958261 A, 01.11.1960 | |||
| АВТОМАТИЧЕСКАЯ СКАНИРУЮЩАЯ ПУСКОВАЯ УСТАНОВКА | 1998 |
|
RU2172458C2 |

