Изобретение относится к области железнодорожной автоматики и может быть использовано в системах интервального регулирования движения поездов для определения свободности от подвижного состава участков железнодорожного пути, в том числе оборудованных полуавтоматической блокировкой.
Известны устройства счета осей для контроля свободности участков пути на основе подсчета числа вошедших и ушедших с участка осей подвижного состава (Татиевский С.А. Обзор систем контроля участков пути на основе счетчиков осей подвижного состава. "Автоматика, связь, информатика" № 9 за 2003 г.), в которых в качестве осевых датчиков, регистрирующих проход осей подвижной единицы, используются бесконтактные датчики, реагирующие на металлическую массу колеса. Каждый осевой датчик имеет два чувствительных элемента (сенсора), что позволяет по последовательности срабатывания сенсоров определять направление движения колеса.
С целью снижения воздействия механических и электрических помех на работу осевых датчиков применяются счетные устройства с изменяющейся чувствительностью (см. патент RU 2182872, кл. В 61 L 1/16, и патент ЕР 0668203 В1, кл. В 61 L 1/16) и устройства, снижающие влияние электромеханических тормозов путем игнорирования сигналов, в пределах временного окна, величина которого зависит от скорости прохода оси между двумя осевыми датчиками (см. патент DE 4302092 А1, кл. В 61 L 1/08).
Недостатками этих технических решений являются сбои в системе счета осей при движении через осевые датчики специализированного подвижного состава (вагонов-путеизмерителей, шпалоподбивочных и путерихтовочных машин), так как указанный подвижной состав имеет ролики и нестандартные колеса, проходящие над датчиком. От воздействия этих элементов счетное устройство, как правило, формирует сигнал ошибки, и участок после проследования подвижной единицы остается неразблокированным (занятым). Аналогичный сбой в работе системы может произойти и от свешивающихся деталей подвижного состава.
Наиболее близким к заявленному изобретению по совокупности существенных признаков и функциональным возможностям является схема формирования импульсов счета осей для железнодорожных систем безопасности (см. патент DE 3837873, кл. В 61 L 1/16), которая предусматривает включение блоков коррекции длительности импульсов между формирователями импульсов, поступающих от сенсоров осевого датчика, и блоком счета осей, осуществляющим контроль состояния участка (свободен/занят) по числу вошедших и ушедших с участка осей подвижного состава. Функция блока коррекции длительности импульсов - задержка входного сигнала с целью его корректировки до поступления сигнала на вход блока счета осей (ликвидация коротких перерывов в импульсах от действия помех или устранение коротких импульсов). Каждый блок коррекции длительности импульсов включает в себя линию задержки - сдвигающий регистр и схему ИЛИ, входы которой подключены к выходам триггеров сдвигающего регистра. С помощью линии задержки устраняется дробление импульсов, если длительность перерыва импульса, вызванного влиянием помехи, не превышает определенной величины - времени задержки сдвигающего регистра, равного длительности периода тактовых импульсов, умноженного на число триггеров регистра. Увеличение длительности импульса, создаваемое линией задержки, частично компенсируется вторым сдвигающим регистром, к информационному входу (D) и инверсному входу обнуления (R) которого подключен выход схемы ИЛИ первого сдвигающего регистра. В этом техническом решении максимальная величина мешающего импульса, которая может быть устранена с помощью блоков коррекции длительности импульсов, определяется максимально возможной скоростью движения осей подвижного состава над осевым датчиком и не зависит от реальной скорости перемещения осей подвижного состава. Хотя мешающие импульсы, вызванные, например, влиянием на осевой датчик измерительных колес малого диаметра на выходе формирователей формирователей первого и второго сенсора, имеют относительно малую длительность и не перекрываются во времени, они могут оказывать влияние на работу системы счета осей, так как при низкой скорости движения их длительность может превышать длительность нормальных импульсов от колес подвижного состава, двигающегося с максимальной скоростью.
Недостатками технического решения, указанного в прототипе, являются ограниченные возможности коррекции длительности импульсов, так как оно устраняет дробление импульсов, связанное в основном с влиянием электромагнитных помех. Величина допустимой коррекции длительности импульсов не определяется скоростью движения подвижного состава в месте установки осевого датчика, что не всегда устраняет влияние на осевой датчик свешивающихся частей подвижного состава. Данное техническое решение может использоваться только для устранения влияния коротких импульсов помех, длительность которых не связана со скоростью движения.
Сущность заявленного изобретения состоит в создании устройства счета осей подвижного состава, в котором производится оценка скорости движения колеса подвижного состава путем измерения времени его прохода между двумя чувствительными элементами (сенсорами) осевого датчика и в зависимости от измеренного времени задается тактовая частота, которая определяет параметры импульсов от следующей оси, которые должны пропускаться на вход блока счета осей, благодаря чему исключается поступление на вход блока счета осей помех, вызванных перемещением над осевым датчиком колес малого диаметра и металлических деталей, длительность импульсов от которых меньше длительности, заданной фактической скоростью движения над осевым датчиком колес нормального диаметра.
Сравнение заявленного технического решения с аналогами и прототипом позволило установить соответствие критерию новизна, так как оно не известно из уровня техники.
Предложенное устройство является промышленно применимым и существующими техническими средствами соответствует критерию изобретательский уровень, так как оно не следует из уровня техники.
При этом из последнего не выявлено каких-либо преобразований, характеризуемых отличительными от прототипа существенными признаками для достижения указанного технического результата.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности результата.
Технический результат достигается тем, что в схему формирования импульсов счета осей для железнодорожных систем безопасности, которая содержит осевой датчик с двумя сенсорами и двумя формирователями импульсов, к выходам которых через блоки коррекции длительности импульсов подключен блок счета осей, дополнительно введены блок измерения времени прохода колеса между сенсорами осевого датчика и соединенный с ним управляемый делитель частоты тактовых импульсов, выход которого соединен с тактовыми входами блоков коррекции длительности импульсов.
Конструктивно устройство счета осей подвижного состава выполнено в виде осевых датчиков, устанавливаемых на рельсах, количество которых, далее n, определяется конкретным проектом, и модуля, состоящего из следующих блоков:
- формирователей импульсов осевых датчиков (на каждый осевой датчик два формирователя импульсов);
- блоков коррекции длительности импульсов (по числу формирователей импульсов);
- блока счета осей с входами для подключения выходов n осевых датчиков (через формирователи импульсов) и выходом для подключения реле контроля свободности участка;
- блока измерения времени прохода колеса между сенсорами датчика,
- управляемого делителя частоты тактовых импульсов.
Каждый из блоков коррекции длительности импульсов выполнен в виде сдвигового регистра и схемы коррекции состояния сдвигового регистра, осуществляющей обнуление сдвигового регистра в том случае, если после окончания импульса число записанных логических единиц в нем менее заданной величины, определяемой допустимой относительной длительностью паразитного импульса по отношению к длительности импульса, сформированного прошедшим над осевым датчиком колесом.
Блок измерения времени прохода колеса между сенсорами датчика выполнен на реверсивном счетчике, на вход прямого счета (+) которого подаются импульсы в интервале между освобождением первого и второго по ходу движения колеса сенсоров S1 и S2 осевого датчика, а на вход обратного счета (-) - импульсы с частотой, пропорциональной максимально возможному ускорению транспортного средства, проходящему над осевым датчиком. Реверсивный счетчик имеет схему запрета переходов из состояния 11111... в 00000... и обратно.
Все блоки разработаны с применением современной элементной базы. Программное обеспечение блоков написано на языке ассемблера и аппаратно-ориентированном языке высокого уровня Cu для микроконтроллеров семейства INTEL51. Для трансляции файлов программы, написанных на языке Cu, использовался компилятор Cu Micro Series 8051 V4.02E/DOS фирмы IAR Systems. Для ассемблирования файлов, написанных на языке ассемблера, использовался ассемблер Micro Series 8051 V2.02/DOS фирмы IAR Systems. Для создания загрузочных модулей использовался редактор связей Micro Series Universal Linker V4.28/DOS фирмы IAR Systems.
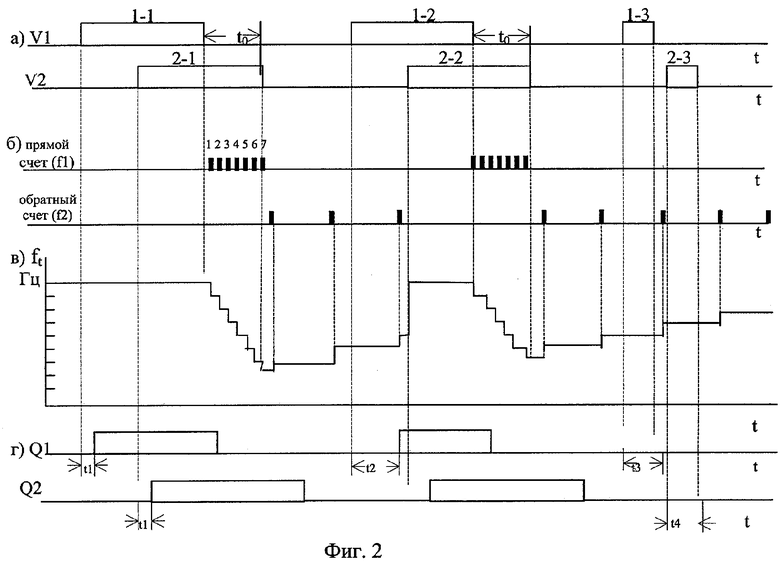
На Фиг.1 представлена структурная схема заявляемого устройства счета осей подвижного состава, содержащая осевой датчик (1) с двумя сенсорами S1 и S2 с фиксированным расстоянием между ними l, формирователи импульсов (2 и 3) первого и второго сенсоров осевого датчика с соответствующими выходами V1 и V2, блоки коррекции длительности импульсов (4 и 5) с информационными входами D и тактовыми входами Т и соответствующими выходами Q1 и Q2, блок счета осей (6), блок измерения времени прохода колеса между сенсорами датчика (7), управляемый делитель частоты тактовых импульсов (8). Выходы формирователей импульсов (2 и 3) V1 и V2 соединены с информационными входами D блоков коррекции длительности импульсов (4 и 5) и с входами In1 и In2 блока измерения времени прохода колеса между сенсорами датчика (7). Выходы частоты прямого счета f1 и обратного счета f2 блока счета осей (6) соединены с соответствующими входами прямого счета (+) и обратного счета (-) блока измерения времени прохода колеса между сенсорами датчика (7), выход тактовой частоты f3 блока счета осей (6) соединен со счетным входом С управляемого делителя частоты тактовых импульсов (8), выход меняющейся тактовой частоты ft управляемого делителя частоты тактовых импульсов (8) соединен с тактовыми входами Т блоков коррекции длительности импульсов (4 и 5). К блоку счета осей (6) подключены выходы Q1 и Q2 блоков коррекции длительности импульсов (4 и 5), а также аналогичные выходы Qn и Qn+1 от вероятных блоков коррекции длительности импульсов других осевых датчиков, установленных на границах контролируемого участка (на Фиг.1 эти блоки коррекции длительности импульсов и осевые датчики не показаны). С выхода С/3 блока счета осей (6) в систему контроля свободности от подвижного состава участков железнодорожного пути поступает сигнал, сообщающий о свободности или занятости контролируемого участка.
На Фиг.2 представлены временные диаграммы сигналов в различных точках заявляемого устройства счета осей подвижного состава при движении колес транспортного средства над осевым датчиком и воздействии помех:
а) диаграммы V1 и V2 импульсов на выходах V1 и V2 формирователей импульсов (2 и 3) сенсоров S1 и S2 осевого датчика (1), при этом перекрывающиеся импульсы 1-1, 2-1 и 1-2, 2-2 сформированы проходом над осевым датчиком двух колес транспортного средства в направлении от сенсора S1 к сенсору S2, а импульсы 1-3 и 2-3 являются паразитными, вызванными проходом над осевым датчиком свешивающейся металлической части;
б) диаграммы прямой счет (f1) и обратный счет (f2) серий импульсов прямого счета частотой f1 (продолжительность серии равна t0) и обратного счета частотой f2, формируемых в блоке измерения времени прохода колеса между сенсорами датчика (7) под действием входных сигналов от выходов V1 и V2 формирователей импульсов (2 и 3) и частот f1 и f2, поступающих с выходов частоты прямого счета f1 и обратного счета f2 блока счета осей (6);
в) диаграмма ft, на которой показана кривая изменения тактовой частоты ft на входах Т блоков коррекции длительности импульсов (4 и 5) при проходе колес транспортного средства над осевым датчиком (1);
г) диаграммы Q1 и Q2, на которых показаны импульсы на выходах Q1 и Q2 блоков коррекции длительности импульсов (4 и 5), задержанные относительно импульсов на выходах V1 и V2 формирователей импульсов (2 и 3) на время соответственно t1 и t2, а также предельные длительности импульсов на выходах Q1 и Q2 соответственно t3 и t4 на моменты появления паразитных импульсов 1-3 и 2-3, которые не пропускаются на вход блока счета осей (6).
Устройство работает следующим образом
Устройство счета осей подвижного состава начинает работать сразу после включения питания. При свободном контролируемом участке оператором нажимается кнопка, приводящая устройства счета осей подвижного состава в состояние "свободно". При отсутствии сигналов от осевого датчика (1) и соответственно от формирователей импульсов (2 и 3), реверсивный счетчик блока измерения времени прохода колеса между сенсорами датчика (7) находится в исходном (нулевом) состоянии и управляемый делитель частоты тактовых импульсов (8) подает на тактовые входы Т блоков коррекции длительности импульсов (4 и 5) максимальную частоту ft. Во время прохода над осевым датчиком (1) первой оси транспортного средства в интервале времени от окончания импульса от первого по направлению движения сенсора (S1) осевого датчика (1) и до окончания импульса от второго сенсора (S2) осевого датчика (1), в блоке измерения времени прохода колеса между сенсорами датчика (7) происходит подсчет импульсов частоты прямого счета f1, подаваемых на вход (+) блока измерения времени прохода колеса между сенсорами датчика (7). На выходах 1, 2...k блока измерения времени прохода колеса между сенсорами датчика (7) появляется код числа сосчитанных импульсов, который устанавливает коэффициент деления в управляемом делителе частоты тактовых импульсов (8). Управляемый делитель частоты тактовых импульсов (8) делит поступающую с выхода блока счета осей (6) частоту f3 на число, определяемое кодом на выходах 1, 2...k блока измерения времени прохода колеса между сенсорами датчика (7). В результате управляемый делитель частоты тактовых импульсов (8) начинает выдавать на тактовые входы Т блоков коррекции длительности импульсов (4 и 5) пониженную частоту ft, причем величина снижения частоты зависит от измеренного времени прохода колеса транспортного средства над осевым датчиком (1) (диаграмма ft на Фиг.2). При проходе следующей оси транспортного средства над осевым датчиком (1), блоки коррекции длительности импульсов (4 и 5) будут отсеивать импульсы, длительность которых определяется частотой, поступающей на тактовые входы Т блоков коррекции длительности импульсов (4 и 5), которая зависит от скорости движения предыдущей оси транспортного средства, проследовавшей над осевым датчиком (1). Чем больше измеренное время прохода оси транспортного средства между сенсорами S1 и S2 осевого датчика (1), тем больше длительность импульсов, которые будут отсеиваться блоками коррекции длительности импульсов (4 и 5). При проследовании очередной оси транспортного средства над осевым датчиком (1) происходит новое измерение времени прохода колеса. Однако ко времени подхода очередной оси транспортного средства к сенсору S1 осевого датчика (1) ее скорость может измениться на величину, определяемую характеристиками транспортного средства. Чтобы избежать при этом потери импульса, поступающего на вход блока счета осей (6), на вход обратного счета (-) блока измерения времени прохода колеса между сенсорами датчика (7) подается частота обратного счета f2, благодаря которой частота ft на тактовых входах Т блоков коррекции длительности импульсов (4 и 5) после прохода колеса транспортного средства постепенно увеличивается. Если измеренное время относится к последней оси транспортного средства, реверсивный счетчик блока измерения времени прохода колеса между сенсорами датчика (7) под действием импульсов обратного счета, поступающих на вход обратного счета (-) блока измерения времени прохода колеса между сенсорами датчика (7), вернется в исходное (нулевое) состояние, что позволяет избежать потери импульса от первой оси следующего транспортного средства вне зависимости от скорости его движения. Импульсы прямого счета поступают на вход прямого счета (+) реверсивного счетчика блока измерения времени прохода колеса между сенсорами датчика (7) в интервале времени t0 (см. диаграммы прямой счет (f1) и обратный счет (f2) на Фиг.2) после фиксации одновременного занятия сенсоров S1 и S2 осевого датчика (1) и установки реверсивного счетчика в исходное (нулевое) состояние. Импульсы обратного счета поступают на вход обратного счета (-) реверсивного счетчика блока измерения времени прохода колеса между сенсорами датчика (7) до возвращения его в исходное (нулевое) состояние. Частота ft на выходе управляемого делителя частоты тактовых импульсов (8) по мере счета импульсов прямого счета (+) начинает снижаться, а после прохода над осевым датчиком (1) колеса транспортного средства медленно возвращается в исходное состояние (см. диаграмму ft на Фиг.2). Импульсы Q1 и Q2 на выходах блоков коррекции длительности импульсов (4 и 5) сдвинуты по отношению к импульсам V1 и V2 на выходах формирователей импульсов (2 и 3) на время 11, а после измерения времени прохода колеса - на время t2; импульсы помех длительностью менее t1 до прохода первого колеса транспортного средства и менее t2 после его прохода, а также длительностью t3 и t4 в момент появления паразитных импульсов после прохода второго колеса транспортного средства, на вход блока счета осей (6) пропускаться не будут (см. диаграммы Q1 и Q2 на Фиг.2).
Из диаграмм Фиг.2 видно, что при движении первой оси транспортного средства происходит задержка передних фронтов импульсов на величину t1. К моменту подхода второй оси задержка будет составлять время t2. Импульсы длительностью менее этой предельной величины на вход блока счета осей (6) не поступят. К моменту появления на выходе формирователей импульсов (2 и 3) паразитных импульсов 1-3 и 2-3 соответственно будут исключаться импульсы, длительность которых короче предельных величин t3 и t4. Поскольку длительность показанных на диаграмме паразитных импульсов 1-3 и 2-3 менее предельных величин t3 и t4, они будут отсеяны.
Электропитание заявляемого устройства счета осей подвижного состава осуществляется по следующему принципу: электропитание от станционной батареи через источник бесперебойного питания поступает на вторичные источники электропитания, которые осуществляют преобразование напряжения в необходимый каждому блоку уровень.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения характеристик транспортного потока | 1989 |
|
SU1661818A1 |
| Следящая система | 1988 |
|
SU1571547A1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И КОРРЕКЦИИ ТАКТОВОЙ ЧАСТОТЫ АВТОНОМНОГО РЕГИСТРАТОРА СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2008 |
|
RU2366981C1 |
| Устройство для определения плотности грунтов | 1990 |
|
SU1749379A1 |
| Устройство для приема и передачи информации с подвижного объекта | 1980 |
|
SU938295A1 |
| Устройство управления электрифицированной дождевальной машиной | 1990 |
|
SU1745158A1 |
| Устройство для управления электрической дождевальной машиной | 1987 |
|
SU1554831A1 |
| Измерительный преобразователь для емкостного датчика | 1988 |
|
SU1659909A1 |
| Устройство записи видеоинформации | 1989 |
|
SU1721840A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАМВАЯ | 1997 |
|
RU2128842C1 |
Изобретение относится к железнодорожной автоматике и предназначено для использования в системах интервального регулирования движения поездов. Устройство содержит осевой датчик с двумя сенсорами и двумя формирователями импульсов. Последние соединены с блоком счета осей через блоки коррекции длительности импульсов первого и второго сенсора. Кроме того, в устройство введены блок измерения времени прохода колеса между двумя сенсорами осевого датчика и соединенный с ним управляемый делитель частоты тактовых импульсов. Счетный вход делителя частоты подключен к выходу тактовой частоты блока счета осей, а выход соединен с тактовыми входами блоков коррекции длительности импульсов с возможностью изменения величины допустимой коррекции длительности импульсов в зависимости от скорости движения подвижного состава в месте установки осевого датчика. Устройство характеризуется повышенной помехоустойчивостью, поскольку в нем исключается поступление на вход блока счета осей помех, вызванных перемещением над осевым датчиком колес малого диаметра и металлических деталей, длительность импульсов от которых меньше длительности, заданной фактической скоростью движения над осевым датчиком колес нормального диаметра. 2 ил.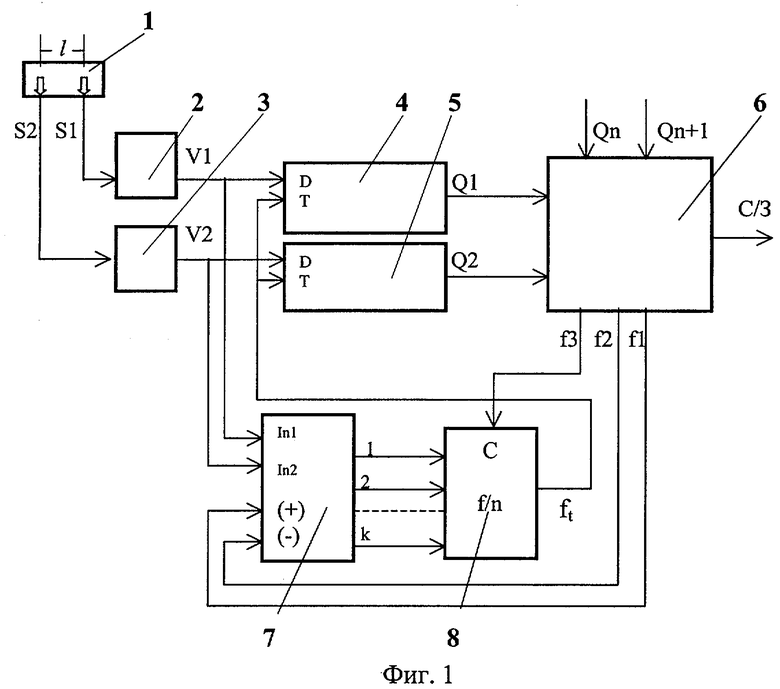
Устройство счета осей подвижного состава, содержащее осевой датчик с двумя сенсорами и двумя формирователями импульсов, соединенными с блоком счета осей через блоки коррекции длительности импульсов первого и второго сенсора, отличающееся тем, что в него введены блок измерения времени прохода колеса между двумя сенсорами осевого датчика и соединенный с ним управляемый делитель частоты тактовых импульсов, счетный вход которого подключен к выходу тактовой частоты блока счета осей, а выход соединен с тактовыми входами блоков коррекции длительности импульсов с возможностью изменения величины допустимой коррекции длительности импульсов в зависимости от скорости движения подвижного состава в месте установки осевого датчика.
| DE 3837873 A1, 10.05.1990 | |||
| СПОСОБ ФИКСАЦИИ ПРОСЛЕДОВАНИЯ КОЛЕС РЕЛЬСОВОГО ТРАНСПОРТА ЧЕРЕЗ КОНТРОЛИРУЕМЫЙ ОТРЕЗОК РЕЛЬСА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1996 |
|
RU2182872C2 |
| RU 2003540 С1, 30.11.1993 | |||
| RU 93018849 А, 20.10.1995. | |||

