сд
ел
Јь М
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU999016A1 |
| Преобразователь кода в угловое положение вала | 1985 |
|
SU1305864A1 |
| Цифровая следящая система | 1977 |
|
SU682872A1 |
| Цифро-аналоговая следящая система | 1978 |
|
SU750434A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Преобразователь кода в угол поворота вала | 1986 |
|
SU1361717A2 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Фазовая следящая система | 1979 |
|
SU788075A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
Изобретение относится к системам автоматического управления и может быть использовано в системах дистанционного автоматического управления, роботах-манипуляторах. Цель изобретения - расширение функциональных возможностей следящей системы за счет обеспечения соответствия согласованного состояния угловым положениям задающей и исполнительной осей после подачи и снятия питания. Следящая система содержит первый делитель 1 частоты, первый мультиплексор 2, первый блок 3 питания, фазовращатель 4 обратной связи, первый формирователь 5 импульсов, второй делитель 6 частоты, второй мультиплексор 7, селектор 8 импульсов рассогласования, первый элемент И 9, генератор 10 линейно изменяющегося напряжения, пиковый детектор 11, усилитель 12 мощности, триггер 13 знака, коммутатор 14, задающий генератор 15, пульт 16 оператора, блок 17 управления, блок 18 датчиков, объект 19 управления, исполнительный механизм 20, второй формирователь 21, элемент И-НЕ 22, второй элемент И 23, третий делитель 24 частоты, третий мультиплексор 25, второй блок 26 питания, задающий фазовращатель 27, третий формирователь 28, четвертый делитель частоты 29, четвертый мультиплексор 30, первый триггер 31, второй триггер 32. Цель изобретения достигается за счет введения элементов И 9, 23, элемента И-НЕ 22, формирователя 28, триггеров 31, 32. 2 ил.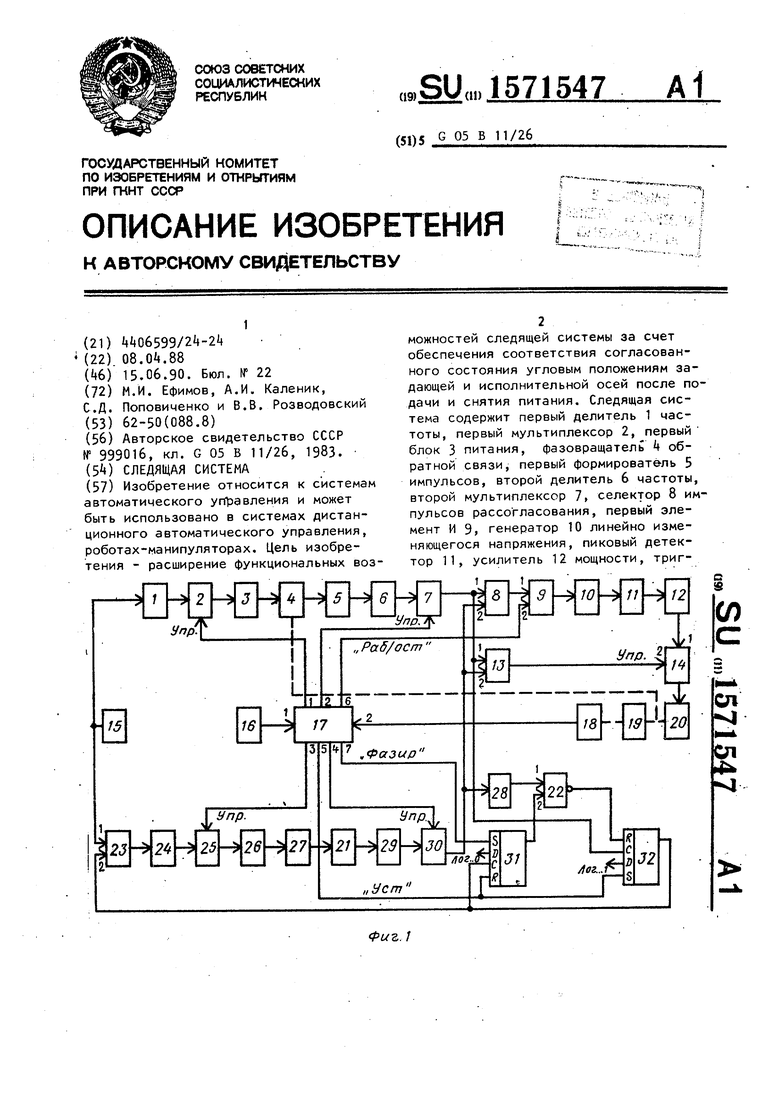
Фиг 1
Гер 13 знака, коммутатор Ik, задаю- ||ций генератор 15, пульт 16 оператора, блок 17 управления, блок 18 датчиков, объект 19 управления, исполнительный Механизм 20, второй формирователь 21, элемент И-НЕ 22, второй элемент И 23, третий делитель 2k частоты, третий мультиплексор 25, второй блок 26 пи
Изобретение относится к системам Автоматического управления и может быть использовано в системах дистанционного автоматического управления, (эоботах-манипуляторах.
Цель изобретения - расширение функциональных возможностей следящей Системы путем обеспечения соответстви Ьогласованного состояния угловым по- Ьожениям задающей и исполнительной осей после подачи и снятия питания.
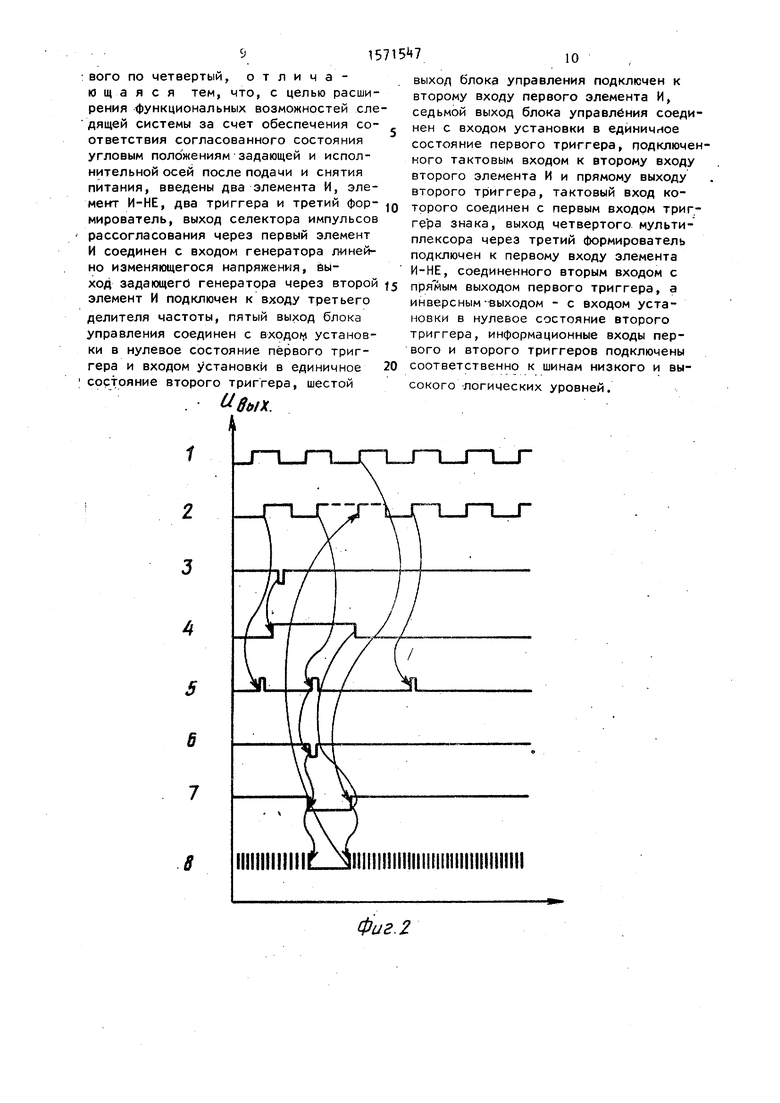
На фиг. 1 приведена структурная схема следящей системы; на фиг. 2 - Временные диаграммы, поясняющие работу следящей системы.
Следящая система (фиг. 1) содержит первый делитель 1 частоты, первый мультиплексор 2, первый блок 3 питания, фазовращатель k обратной связи, первый формирователь 5 импульсов, второй делитель 6 частоты, второй мультиплексор 7, селектор 8 импульсов рассогласования, первый элемент И 9, генератор 10 линейно изменяющегося напряжения, пиковый детектор 11, усилитель 12 мощности, триггер 13 знака, коммутатор 14, задающий генератор 15, пульт 16 оператора, блок 17 управления, блок 18 датчиков, объект 19 управления, исполнительный механизм 20, второй формирователь 21, элемент И-НЕ 22, второй элемент И 23, третий делитель 2k частоты, третий мультиплексор 25, второй блок 26 питания, задающий фазовращатель 27, третий формирователь 28, четвертый делитель 29 частоты, четвертый мультиплексор 3 первый триггер 31, второй триггер 32.
Следящая система работает следующим образом.
После подачи питающего напряжения на следящую систему (при предваритель ном заданном режиме Останов) на шестом выходе блока 17 управления устанавливается уровень логического О
тания, задающий фазовращатель 27, третий формирователь 28, четвертый делитель 29 частоты, четвертый муль- типлексор 30, первый триггер 31, второй триггер 32. Цель изобретения достигается за счет введения элементов И 9, 23, элемента И-НЕ 22, формирователя 28, триггеров 31, 32. 2 ил.
5
0
5
5
0
5
0
импульс рассогласования не проходит на вход генератора 10 линейно изменяющегося напряжения и объект управления остается в предыдущем состоянии.
По сигналу Сброс, подаваемому с пульта 16 оператора, на пятом выходе блока 17 управления формируется короткий импульс отрицательной полярности, которым первый 31 и второй 32 триггеры устанавливаются соответственно в нулевое и единичное состояния. При этом тактовые импульсы через второй элемент И 23 поступают на вход третьего делителя 2k частоты.
На выходах первого 3 и второго 26 блоков питания формируются, например, трехфазные системы напряжений для за- питки статорных обмоток фазовращателей.
Частота напряжений питания фазовращателей определяется кодами управления, поступающими соответственно с первого и третьего выходов блока 17 управления на управляющие входы первого 2 и третьего 25 мультиплексоров.
Выходные сигналы фазовращателей k и 27 с помощью первого 5 и третьего 28 соответственно формирователей преобразовываются в прямоугольную последовательность импульсов, поступающих через второй 6, четвертый 29 делители частоты и второй 7, четвертый 30 мультиплексоры на входы селектора 8 импульсов рассогласования и первого триггера 13.
Необходимым условием функционирования следящей системы является выполнение условия
п,п7 пэп 4,
где n.j, п, п3, п4- коэффициенты деления частоты задающего генератора первым 1, вторым 6, третьим
и четвертым 29 делителями частоты соответственно.
Выбор коэффициента деления осуществляется с помощью кодов, поступающих на управляющие входы первого 2, второго 7, третьего 25 и четвертого 30 мультиплексоров соответственно с первого, шестого, третьего и четвертого выходов блока 17 управления, в зависимости от состояния объекта 19 управления, контролируемого блоком 18 датчиков, сигналы которого поступают на второй вход блока 17 управления, или по желанию оператора, задающего коды управления мультиплексорами с пульта 16 оператора.
Таким образом, на выходах второго 7 и-четвертого 30 мультиплексоров формируются две прямоугольные импульсные последовательности типа меандр
одинаковой частоты, сдвинутые по фаз одна относительно другой. Фазовый сдвиг определяется углом рассогласования оси отработки и оси задатчика.
Селектор 8 импульсов рассогласования формирует импульсы, длительность которых определяется фазовым сдвигом входных сигналов.
В режиме Работа импульсы рассогласования поступают на вход генератора 10 линейно изменяющегося напряжения, который формирует пилообразное напряжение с амплитудой, пропорциональной длительности импульсов рассогласования. Пилообразное напряжение с помощью пикового детектора 1 преобразуется в постоянное, которое через усилитель 12 мощности и коммутатор 1 подается на исполнительный механизм 20.
Коммутатор 14 управляется первым триггером 13, который устанавливается, например, в состояние логической 1, если фаза сигнала на выходе второго мультиплексора -7 опережает фазу сигнала на выходе четвертого мультиплексора 30, и состояние логического О, если отстает от нее. Коммутатор 14 устанавливает .полярность напряжения на выходе таким образом, чтобы исполнительный механизм 20 вращался в направлении, соответствующем уменьшению угла рассогласования, при этом уменьшается длитель- ность импульса рассогласования.
По сигналу Сброс первый 31 и второй 32 триггеры устанавливаются соответственно в нулевое и единичное состояния. По фронтам импульсов, поступающих с выхода второго мультиплексора 7 на тактовый вход второго триггера 32 подтверждается по D-входу единичное состояние, соответственно 10 нулевое состояние триггера 31, следовательно, в этом состоянии триггеры могут находиться сколь угодно долго В режиме Останов импульсы рассогласования не проходят на выход первого элемента И 9, управляющее напряжение, поступающее на исполнительный механизм, равно нулю, объект управления сохраняет свое предыдущее состояние.
По сигналу Установка с седьмого выхода блока 17 управления короткий импульс отрицательной полярности (фиг. 2, диаграмма 3) поступает на вход установки в единичное состояние 25 триггера 31, который устанавливается в единичное состояние и разрешает прохождение импульса с выхода третьего формирователя 28 через элемент И-НЕ 22 (фиг. 2, диаграмма ). Короткий 30 импульс положительной полярности, сформированный третьим формирователем 28 по фронту импульса, поступающего на его вход с выхода четвертого мультиплексора 30 (фиг. 2, диаграмме ма 5), инвертируется элементом И-НЕ
15
20
40
22 и поступает на вход установки в нулевое состояние триггера 32 (фиг. 2, диаграмма 6), который устанавливается в нулевое состояние и запрещает прохождение тактовых импульсов через второй элемент И 23 на вход третьего делителя частоты (фиг. 2, диаграмма 7, 8).
Фронтом первого же импульса, поступающего с выхода второго мульти- - плексора 7 на тактовый вход триггера 32, последний устанавливается в единичное, а триггер 31 - в нулевое сос- тояние, т.е. триггеры устанавливаются в исходное состояние.
При этом до подачи следующего сигнала Установка триггера 31 запрещает прохождение импульсов с выхода третьего формирователя 28 через элемент И-НЕ 22 на вход установки в нулевое состояние триггера 32. Уровень логической 1 с выхода триггера 32 разрешает прохождение тактовых импуль
сов через второй элемент-И 23 на тре тий делитель 2k частоты./
Таким образом, по сигналу Установка производится совмещение импуль-5
сных последовательностей с выходов второго 7 и четвертого 30 мультиплексоров (фиг. 2, диаграммы 1,2), при Этом импульсы рассогласования равны , нулю. Согласованное состояние достигается без механического перемещения эси отработки и оси задатчика.
В известной следящей системе в мо- мент подачи напряжения питания вслед15715 78
Согласованное состояние устанавливается в течение одного периода следования импульсов, действующих на входах селектора импульсов рассогласования, путем остановки в определенный момент времени вращающегося магнитного поля фазовращателя-задат- мика (по фронту импульса на выходе четвертого мультиплексора запрещается поступление тактовых импульсов на третий делитель частоты) и запуска с этого положения вращающегося магнитного поля также в определенный момент
10
етвие произвольной начальной установ- J5 времени (по фронту следующего импуль20
35
ки триггеров в составе первого - четвертого делителей частоты и первого, второго источников питания фазовращателей, а также углового рассогласования задающей оси и оси отработки на выходе селектора импульсов рассогласования формируется импульс, длительность которого не соответствует углу рассогласования задающей оси и оси отработки за счет составляющей, вы- 25 званной произвольной установкой триггеров в составе делителей. Исполнительный механизм отрабатывает угол, соответствующий длительности импульса рассогласования, причем отработан- 30 ный угол отличен от имеющегося угла рассогласования между задающей осью и осью отработки. Таким образом, согласование происходит в произвольном угловом положении оси отработки, независимо от углового положения задающей оси.
В дальнейшем ось отработки отслеживает перемещение задающей оси, причем длительность импульса рассогласования соответствует углу рассогласования между задающей осью и осью отработки. Однако перемещение задающей оси отрабатывается без взаимной привязки угловых координат задающей оси и оси отработки
Таким образом, в известной следящей системе после подачи напряжения питания исполнительный механизм отрабатывает произвольный угол, после чего устанавливается согласованное состояние.
Данное техническое решение позволяет установить согласованное состояние следящей системы без перемещения оси отработки (изменения состояния объекта, управления) после подачи напряжения питания или в любой произвольный момент времени.
40
45
50
55
са на выходе второго мультиплексора разрешается прохождение тактовых импульсов на вход третьего делителя частоты) .
Данное техническое решение позволяет, например, реализовать в следящих системах режим периодической коррекции состояния объекта управления, т.е. коррекции положения оси отработки через длительные промежутки времени с отключением напряжения питания следящей системы.
Формула изобретения
Следящая система, содержащая последовательно соединенные задающий генератор, первый делитель частоты, первый мультиплексор, первый блок питания, фазовращатель обратной связи, первый формирователь, второй делитель частоты, второй мультиплексор, селектор импульсов рассогласования, последовательно соединенные третий делитель частоты, третий мультиплексор, второй блок питания, второй формирователь, четвертый делитель частоты, четвертый мультиплексор, последовательно соединенные генератор линейно изменяющегося напряжения, пиковый детектор, усилитель мощности, коммутатор, исполнительный механизм, объект управления, блок датчиков, триггер знака, подключенный первым входом к выходу второго мультиплексора, вторым входом - к второму входу селектора импульсов рассогласования и выходу четвертого мультиплексора, а выходом - к управляющему входу коммутатора, последовательно соединенные пульт оператора и блок управления, подключенный вторым входом к выхбду блрка датчиков, а выходами с первого по четвертый - к управляющим входам мультиплексоров- соответственно с пер0
5
5 0
0
5
0
5
са на выходе второго мультиплексора разрешается прохождение тактовых импульсов на вход третьего делителя частоты) .
Данное техническое решение позволяет, например, реализовать в следящих системах режим периодической коррекции состояния объекта управления, т.е. коррекции положения оси отработки через длительные промежутки времени с отключением напряжения питания следящей системы.
Формула изобретения
Следящая система, содержащая последовательно соединенные задающий генератор, первый делитель частоты, первый мультиплексор, первый блок питания, фазовращатель обратной связи, первый формирователь, второй делитель частоты, второй мультиплексор, селектор импульсов рассогласования, последовательно соединенные третий делитель частоты, третий мультиплексор, второй блок питания, второй формирователь, четвертый делитель частоты, четвертый мультиплексор, последовательно соединенные генератор линейно изменяющегося напряжения, пиковый детектор, усилитель мощности, коммутатор, исполнительный механизм, объект управления, блок датчиков, триггер знака, подключенный первым входом к выходу второго мультиплексора, вторым входом - к второму входу селектора импульсов рассогласования и выходу четвертого мультиплексора, а выходом - к управляющему входу коммутатора, последовательно соединенные пульт оператора и блок управления, подключенный вторым входом к выхбду блрка датчиков, а выходами с первого по четвертый - к управляющим входам мультиплексоров- соответственно с первого по четвертый, отличающаяся тем, что, с целью расширения функциональных возможностей следящей системы за счет обеспечения соответствия согласованного состояния угловым положениям задающей и исполнительной осей после подачи и снятия питания, введены два элемента И, элемент И-НЕ, два триггера и третий фор- мирователь, выход селектора импульсов рассогласования через первый элемент И соединен с входом генератора линейно изменяющегося напряжения, выход задающего генератора через второй элемент И подключен к входу третьего делителя частоты, пятый выход блока управления соединен с входом установки в нулевое состояние первого триггера и входом установки в единичное состояние второго триггера, шестой
Ufax.
f
3
4
5 6 1
8
выход блока управления подключен к второму входу первого элемента И, седьмой выход блока управления соединен с входом установки в единичное состояние первого триггера, подключенного тактовым входом к второму входу второго элемента И и прямому выходу второго триггера, тактовый вход которого соединен с первым входом триггера знака, выход четвертого мультиплексора через третий формирователь подключен к первому входу элемента И-НЕ, соединенного вторым входом с прямым выходом первого триггера, а инверсным-выходом - с входом установки в нулевое состояние второго триггера, информационные входы первого и второго триггеров подключены соответственно к шинам низкого и высокого логических уровней.
liililiiiilillllililiilDliliiiltll
| Следящая система | 1981 |
|
SU999016A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
