Изобретение относится к области сейсмической разведки, в частности к процессу проведения наземных сейсмических исследований в режиме длительных программируемых пространственно распределенных наблюдений, в том числе при выполнении активного и пассивного сейсмического мониторинга, а также при работах в особо отдаленных районах и сложных поверхностных условиях.
Известен автономный регистратор сейсмических сигналов, включающий микропроцессорный блок управления, высокостабильный генератор тактовой частоты, соединенное с первым входом-выходом микропроцессорного блока управления запоминающее устройство, и соединенные последовательно, по меньшей мере, один предварительный усилитель, по меньшей мере, один аналого-цифровой преобразователь (дельта-сигма модулятор) и цифровой фильтр, выход которого соединен с первым входом микропроцессорного блок управления, первый выход которого подключен к управляющим входам предварительного усилителя, аналого-цифрового преобразователя и цифрового фильтра. При этом известное устройство содержит связанный с микропроцессорным блоком управления блок временной привязки регистрируемой информации, образованный GPS-приемником, высокостабильным генератором тактовой частоты и блоком временной синхронизации (заявка на патент РФ №2007100422/28, G01V 1/24, прототип). Данное устройство обеспечивает, за счет встроенной системы временной синхронизации, высокоточную привязку регистрируемых сейсмических сигналов к единому мировому времени и позволяет проводить сейсмические исследования на площадях любых размеров с высокой достоверностью и производительностью, в том числе в особо сложных полевых условиях.
К недостаткам данного технического решения следует отнести ограниченные эксплуатационные возможности, связанные с недостаточной надежностью работы в условиях отсутствия или нестабильного приема сигналов точного времени от GPS-приемника, например, при проведении длительных наблюдений по методике пассивного и/или активного сейсмического мониторинга. В этом случае точность формирования временных интервалов определяется только стабильностью генератора тактовой частоты, поскольку при исчезновении сигнала на входе GPS-приемника отсутствует и точный секундный импульс (сигнал PPS). Вследствие этого, для обеспечения максимально надежных сейсмических сеансов регистрации в указанных выше условиях с использованием данного устройства, необходимо проводить высокоточную настройку генератора тактовой частоты еще на стадии изготовления устройства, а также осуществлять периодическую поверку последнего, что в целом существенно усложняет и ограничивает возможности применения данных устройств.
Известно устройство хронирования информации автономной информационно-измерительной системы, предназначенное для временной привязки информации в автономных информационно-измерительных системах, например в донных геофизических станциях (патент РФ №2277298, H03L 7/00). Устройство содержит опорный генератор тактовых импульсов, генератор термозависимых тактовых импульсов, микропроцессор, выполняющий функции устройства кодирования времени цифрового регистратора (тактовых импульсов) и поступающей в систему информации, делителя частоты опорного генератора тактовых импульсов и управляемого счетчика тактовых импульсов, эталон частоты и компьютер.
Известно также устройство временной привязки регистрируемой информации, включающее кварцевый генератор, совмещенный с датчиком температуры, эталон частоты (GPS-приемник), контроллер и формирователь выходного сигнала (синтезатор) (патент US 6472943, H03L 7/00, прототип). Контроллер включает блок управления (микропроцессор), умножитель частоты, компаратор, пропорциональный интегратор и блок формирования поправки частоты.
Недостатком данного технического решения является его сложность и ограничения по длительности надежной автономной работы с обеспечением необходимой стабильности по частоте выходного сигнала. Указанные недостатки связаны с заложенной в данном техническом решении предварительной процедурой снятия зависимости частоты кварцевого генератора от температуры и записью этой зависимости в том или ином виде в память микропроцессора. Последующая корректировка частоты в ходе эксперимента или при обработке результатов производится с учетом зависимости, полученной для каждого экземпляра кварцевого генератора. При этом требуется также периодическая поверка генераторов через определенные промежутки времени.
Задачей группы изобретений является обеспечение достоверности получаемой сейсмической информации при длительной работе автономных сейсмических регистраторов в условиях нестабильного приема или отсутствия внешнего синхронизирующего сигнала точного времени.
Техническим результатом группы изобретений является также обеспечение высокоточной автоподстройки тактовой частоты как при активации синхронизирующего (опорного) генератора, так и в условиях отсутствия сигналов точного времени, и обеспечении, таким образом, временной привязки регистрируемой информации с необходимой точностью.
Техническим результатом группы изобретений является также исключение специальной процедур настройки высокоточного тактового генератора в процессе изготовления и периодической поверки регистраторов.
Указанный технический результат достигается за счет того, что в автономном регистраторе сейсмических сигналов, включающем микропроцессорный блок управления и регистрации, первый вход и первый выход которого связаны с измерительным каналом сейсмических сигналов, второй вход указанного микропроцессорного блока управления и регистрации связаны с выходом блока временной привязки регистрируемой информации, содержащим высокостабильный генератор тактовой частоты, GPS-приемник и блок временной синхронизации, выход которого является выходом устройства временной привязки регистрируемой информации, выход точного секундного импульса (синхронизирующий выход) GPS-приемника связан с первым входом блока временной синхронизации, второй вход блока временной синхронизации связан с информационным выходом GPS-приемника, вход-выход микропроцессорного блока управления является входом-выходом программ / данных автономного регистратора сейсмических сигналов, согласно изобретению блок временной привязки регистрируемой информации дополнительно включает устройство автоматической настройки и коррекции тактовой частоты, при этом первый вход указанного устройства автоматической настройки и коррекции связан с генератором тактовых импульсов, второй - с выходом точного секундного импульса (синхронизирующим выходом) GPS-приемника, а выход - с третьим входом блока временной синхронизации.
Поставленная задача решается также тем, что в устройстве автоматической настройки и коррекции тактовой частоты автономного регистратора сейсмических сигналов, включающем блок формирования поправки частоты, связанный с блоком формирования выходного сигнала тактовой частоты, блок управления, первый и второй входы которого являются первым и вторым входами блока и связаны соответственно с опорным корректируемым сигналом и с эталонным сигналом (сигналом мирового точного времени), согласно изобретению блок формирования поправки частоты содержит соединенные последовательно связанный с третьим входом блока управления делитель частоты, регистр ошибок и формирователь импульса коррекции, выход которого связан с первым входом блока формирования выходного сигнала тактовой частоты, тактовые входы указанных делителя, регистра ошибок, формирователя сигнала коррекции и блока формирования выходного сигнала тактовой частоты связаны с первым входом блока управления, первый выход которого связан с входами «сброс» указанного делителя частоты, а второй - с входом «занос» регистра ошибок, второй, знаковый, выход регистра ошибок связан с вторым входом блока формирования выходного сигнала тактовой частоты, выход которого является выходом устройства.
Сущность технического решения согласно изобретению состоит в организации автоматического измерения реальной ошибки частоты тактового генератора относительно сигналов точного времени (PPS), запоминании и использовании ее для формирования точных временных интервалов и обеспечении таким образом возможности работы регистраторов сейсмической информации в автономном режиме в течение длительного времени с достоверной временной регистрацией сейсмических сигналов.
На фиг.1 приведена структурная схема автономного регистратора сейсмических сигналов согласно изобретению; на фиг.2 - структурная схема устройства автоматической настройки и коррекции тактовой частоты согласно изобретению; на фиг.3. приведена структурная схема регистра ошибок устройства автоматической коррекции тактовой частоты, на фиг.4 - структурная схема блока формирования выходного сигнала устройства автоматической коррекции тактовой частоты; фиг.5. иллюстрирует работу блока управления устройства автоматической настройки и коррекции тактовой частоты согласно изобретению.
Автономный регистратор сейсмических сигналов содержит связанный с сейсмоприемниками измерительный канал 1, включающий соединенные последовательно, по меньшей мере, один коммутатор, по меньшей мере, один предварительный усилитель, по меньшей мере, один аналого-цифровой преобразователь (дельта - сигма АЦП), многоканальный цифровой фильтр (не показаны). Выход измерительного канала 1 связан с первым входом (входом данных) микропроцессорного блока 2 управления. Первый выход (управляющий) микропроцессорного блока 2 управления связан с управляющими входами блоков измерительного канала 1. Второй вход микропроцессорного блока 2 управления связан с выходом блока 3 временной привязки регистрируемой информации. Блок 3 временной привязки регистрируемой информации включает блок 4 временной синхронизации, генератор 5 тактовой частоты, GPS-приемник 6 и устройство 7 автоматической коррекции тактовой частоты. Блок 4 временной синхронизации включает формирователь 8 точного секундного импульса и соединенные последовательно дешифратор 9, блок 10 регистров времени и даты и блок 11 счетчиков времени и даты. Первый вход формирователя 8 точного секундного импульса является тактовым входом блока 4 временной синхронизации, второй вход формирователя 8 точного секундного импульса является синхронизующим входом блока 4 временной синхронизации, вход дешифратора 9 является информационным входом формирователя 8 точного секундного импульса. Устройство 7 автоматической настройки и коррекции частоты (фиг.2) тактового генератора 5 содержит блок 12 формирования сигнала поправки частоты, связанный с блоком 13 формирования выходного сигнала тактовой частоты. Блок 12 формирования сигнала поправки частоты содержит блок 14 управления (микропрограммный автомат), первый и второй входы которого связаны соответственно с выходом тактового генератора 5 и с выходом сигнала точного времени GPS-приемника 6, а также соединенные последовательно связанный с третьим входом блока 14 управления делитель частоты 15, регистр ошибок 16 и формирователь 17 импульса коррекции, выход которого связан с первым входом блока 13 формирования выходного сигнала тактовой частоты. Тактовые входы указанного делителя 15, регистра ошибок 16, формирователя 17 импульсов коррекции и блока 13 формирования выходного сигнала связаны с первым входом блока 14 управления, первый выход которого связан с входом «Сброс» делителя 15, частоты, а второй - с входом «Занос» регистра 16 ошибок. Второй выход (знаковый) регистра ошибок 16 связан со вторым входом блока 13 формирования выходного сигнала тактовой частоты. Выход блока 13 формирования выходного сигнала тактовой частоты связан с тактовым входом блока 4 временной синхронизации. Синхронизирующий вход блока 4 временной синхронизации связан выходом сигнала точного времени GPS-приемника 6, информационный вход блока 4 временной синхронизации связан с информационным выходом GPS-приемника 6.
Регистр 16 ошибок (фиг.3) включает связанные с первым выходом делителя частоты 15 инвертор 18 и сумматор 19, на другой вход которого подана «1», выходы указанных инвертора 18 и сумматора 19 связаны с первым и вторым информационными входами мультиплексора 20, третий, управляющий, вход которого связан с одним из разрядов делителя частоты 15 и старшим разрядом первого входа регистра 2, младшие разряды которого связаны с выходом мультиплексора 20. Второй, управляющий, вход регистра 21 связан со вторым выходом блока 14 управления, сигнал «занос». Тактирующий, третий, вход регистра 21 связан с выходом генератора 5 тактовой частоты. Первый выход регистра 21 (младшие биты) связан с первым информационным входом формирователя 17 импульсов коррекции, второй, знаковый, выход регистра 21 связан с информационным, знаковым входом, блока 13 формирования выходного сигнала.
Блок 13 формирования выходного сигнала тактовой частоты (фиг.4) включает соединенные последовательно синхронный RS-триггер 22, схему И 23, счетчик 24 и схему НЕ-И 25. При этом первый, установочный S-вход, триггера 22 связан с выходом формирователя 17 импульсов коррекции, второй, информационный (сбросовый) R-вход, связан с выходом схемы НЕ-И 25, третий, тактовый, вход - С, связан с генератором 5 тактовой частоты. Выход триггера 22 связан с первым входом схемы И 23. Второй вход схемы И 23 связан с выходом второй схемы НЕ-И 25. Выход схемы И 23 связан с первым, загрузочным, входом «занос», счетчика 24. Второй, тактовый, вход - С счетчика 24 связан с генератором 5 тактовой частоты. Информационные входы счетчика 24 третий (D0) и пятый (D2) связаны с землей, а четвертый (D1) - со знаковым выходом регистра 16 ошибок. Первый, второй и третий выходы счетчика 24 связаны с первым, вторым и третьим входами схемы НЕ-И 25. Третий выход счетчика 24 является выходом блока 13 формирования выходного сигнала тактовой частоты.
Вход-выход микропроцессорного блока 2 управления является входом-выходом регистратора и через разъем 26 подключается к внешнему блоку управления, управляющему компьютеру (не показан).
Высокостабильный генератор 5 тактовой частоты может быть выполнен на термостатированном генераторе фирмы «МОРИОН» типа ГК80-ТС-2-5 В-10М-В1 и обеспечивать стабильность частоты не хуже 10-8.
Микропроцессорный блок 2 управления может быть построен на части микросхемы программируемой логики серии «Асех 1К» или «Cyclone» фирмы «Altera» и микропроцессоре фирмы Atmel 89C5132-IL.
Устройство 7 автоматической настройки и коррекции частоты может быть реализовано на оставшейся части микросхемы программируемой логики серии серии «Асех 1К» или «Cyclone» фирмы «Altera».
В качестве оконечного разъема 26 может быть использован 16-контактный разъем СН-41Б-16.
Автономный регистратор сейсмических сигналов согласно изобретению работает следующим образом.
Автономный регистратор сейсмических сигналов через разъем 26 подключается к управляющему компьютеру (не показан) и программируется в соответствии с утвержденным планом эксперимента. Программирование включает в себя: указание времени начала наблюдения (год, месяц, день, часы, минуты, секунды или сейчас же), длительность наблюдения (часы, минуты, секунды), режимы регистрации (коэффициенты усиления по каждому из каналов регистрации, период квантования). Заданные программы настройки сохраняются в запоминающем устройстве микропроцессорного блока 2 управления и регистрации.
Непосредственно перед проведением сейсмических работ включается питание автономных регистраторов и они выставляются на местности там, где прием спутниковых сигналов GPS-приемником 6 стабилен.
Источником сигналов точного времени в начальный момент является GPS-приемник 6. Сигналы мирового времени, принимаемые GPS-приемником 6, синхронизируют связанный с устройством 7 автоматической настройки и коррекции частоты блок 4 временной синхронизации. GPS-приемник 6 формирует два сигнала: импульсный сигнал точного секундного импульса (PPS), фронт которого совпадает с началом секунды, и последовательную посылку данных, содержащую информацию о текущем годе, месяце, сутках, часе, минуте и секунде, ежесекундно формирующуюся на выходе последовательного порта указанного GPS-приемника 6 и поступающую на вход дешифратора 9 блока 6 временной синхронизации. Импульсный сигнал PPS синхронизует счетчики формирователя 8 точного секундного импульса, блока 11 счетчиков времени/дат и служит в качестве опорного сигнала для устройства 7 автоматической настройки и коррекции тактовой частоты. Сравнивая импульсы истинной секунды PPS и импульс, полученный от генератора 5 тактовой частоты на значительном промежутке времени, можно определить погрешность генератора 5 тактовой частоты и на следующем отрезке времени внести поправку в выходной тактовый сигнал, который используется для формирования точного секундного импульса формирователем 8. При пропадании спутниковых сигналов введение коррекции будет происходить опираясь на результаты последнего достоверного измерения погрешности. Последние результаты измерений отражают в себе все погрешности точности настройки генератора 5, полученные после включения и выхода генератора 5 в рабочий режим.
Работа блока 12 формирования сигнала поправки частоты определяется логикой блока 14 управления (микропрограммным автоматом), как это показано на фиг.5. После включения питания двоичный счетчик делителя 15 частоты блока 12 формирования сигнала поправки частоты начинает считать с «0». При этом устройство 14 управления находится в режиме «прогрев генератора» до достижения делителем частоты 15 максимального значения. По достижении счетчиком максимального значения устройство 14 управления переходит в режим «синхронизация», в котором ожидается появление фронта PPS. Первый пришедший фронт PPS приводит к формированию сигнала «сброс», который поступает на делитель частоты 15 и переводит устройство управления 14 в режим «фиксации ошибок». По достижении делителем частоты 15 заданного значения N - начало окна анализа, разрешается прием фронта PPS от GPS-приемника 6. Выход из состояния приема фронта PPS возможен или при наличии этого сигнала, или по достижении делителем частоты 15 заданного значения М - конец окна анализа. Фронт PPS пришедший в окне анализа формирует сигнал «занос» на регистр 16 ошибок. Режим «фиксация ошибки» завершается сигналом «занос» на регистр 16 или без него. При этом устройство 14 управления снова переходит в режим «синхронизация». Однократный «занос» регистра 16 вызывает появление сигнала готовности устройства к работе, что отображается на индикаторе регистратора (условно не показан) и свидетельствует о достоверной временной привязке сейсмических данных, в том числе при отсутствии сигналов точного времени GPS-приемника 6.
Устройство 7 автоматической настройки и коррекции частоты работает следующим образом. Младшие разряды делителя частоты 15 поступают на информационные входы регистра 16 ошибок. При этом старший разряд из поступивших сигналов выделяется как знаковый. Указанный знаковый сигнал фиксируется в регистре 16 и выбирает логику формирования прочих разрядов для фиксации в регистре 16. Фиксация данных в регистре 16 происходит под управлением сигнала «занос» от блока управления 14 по фронту сигнала тактового генератора 5. При отсутствии ошибки частоты тактового генератора 5 сигнал PPS и, соответственно, сигнал «занос» появятся в момент изменения старшего разряда из поступающих на вход регистра 16 ошибок. Пока старший разряд еще не изменился, мультиплексор 20 выбирает и подает на вход регистра 21 инвертированные инвертором 18 данные. Если знаковый разряд изменился, то на вход регистра 21 мультиплексором 20 подаются данные сумматора 19, который к исходному значению добавляет «1». Регистр 16 ошибок, включающий инвертор 18, сумматор 19 и мультиплексор 20, позволяет в регистре 21 фиксировать ошибку не в двоичном знаковом формате, а в виде модуля ошибки (количество ошибочных тактов на периоде наблюдения, который определяется заданным значением М), и знака ошибки (частота генератора 5 отстает или опережает идеальную). Модуль ошибки с выхода регистра 21 поступает на вход формирователя 17 импульсов коррекции, а знак ошибки напрямую поступает на блок 13 формирования выходного тактового сигнала. Формирователь 17 импульсов коррекции, в соответствии со значением модуля ошибки, в промежутке времени, равном времени измерения, формирует импульсы коррекции длительностью в один такт генератора 5 тактовой частоты. Количество импульсов коррекции равно значению модуля ошибки.
Формирователь 17 импульсов коррекции может быть выполнен с использованием стандартных схем, счетчиков и многовходовых схем И и ИЛИ.
Блок 13 формирования выходного тактового сигнала включает RS-триггер 22, счетчик 24, которые работают синхронно под управлением генератора тактовой частоты 5, схему И 23 и схему НЕ-И 25. Импульс коррекции с выхода формирователя 17 поступает на S-вход триггера 22 и переключат его в состояние «1». Счетчик 24 делит частоту тактового генератора на 5 и, проходя последовательно все значения, достигает «0». На выходе трехвходовой схемы НЕ-И 25 появляется высокий уровень. Если триггер 22 стоял в значении «1», то на выходе схемы И 23 формируется импульс «заноса» на счетчик 24. Появление сигнала «занос» нарушает очередность перехода счетчика 24 на один такт. Обычно, при отсутствии импульса заноса, счетчик 24 проходит поочередно состояния.. 0-1-2-3-4-0-1-2-... Если знак ошибки равен «0», то однократный переход счетчика 24 будет выглядеть как .4-0-0-1-2-.., т.е. происходит задержка на один такт в работе счетчика 24. Если знак ошибки равен «1», то однократный переход счетчика 24 будет выглядеть как ..4-0-2-3-4.., то есть в работе счетчика 24 происходит ускорение на один такт. Выходной сигнал с блока 13, который снимается со старшего разряда выхода указанного счетчика 24, что соответствует его состоянию, равному «4», поступает на вход формирователя 8 точного секундного импульса блока 4 временной синхронизации и обеспечивает формирование точных временных интервалов.
Процедура измерения ошибок и внесение корректирующей поправки тактовой частоты происходит автоматически при каждом включении устройства, что позволяет в ходе изготовления автономных регистраторов исключить процедуру настройки тактовых генераторов, а также отказаться от их периодической настройки в ходе эксплуатации.
В случае отсутствия сигнала точного времени с GPS-приемника 6 время формируется с использованием откорректированной внутренней частоты блока 13 формирования выходного сигнала.
Дешифратор 9 в последовательном коде формирует сигналы текущего года, месяца, суток, часа, минуты и секунды в параллельном двоичном коде и загружает данные в соответствующие регистры блока 10 регистров времени и даты. В условиях устойчивого приема импульс сигнала PPS с GPS-приемника 6 поступает на установочный вход формирователя (счетчика-делителя частоты) 8 точного секундного импульса и сбрасывает его в «0». Одновременно этот же сигнал поступает на установочный вход блока 11 счетчиков времени и даты и заносит в них текущее значение времени и даты с блока 10 регистров времени и даты. На тактовый вход формирователя 8 точного секундного импульса поступают импульсы с выхода устройства 7 настройки и коррекции тактовой частоты. С первого выхода формирователя 8 точного секундного импульса тактовый сигнал поступает на счетный вход блока 11 счетчиков времени и даты.
С выхода блока 4 временной синхронизации тактовые импульсы поступают на второй вход микропроцессорного блока 2 управления и регистрации автономного регистратора.
С момента прохождения хотя бы одного цикла измерения ошибки и коррекции частоты регистраторы без выключения питания могут перемещаться на местности в необходимую точку проведения эксперимента, в том числе туда, где прием GPS-сигналов отсутствует или не стабилен. При этом обеспечивается высокая точность временной привязки длительное время, вне зависимости от заводской настройки генераторов.
В режиме записи сейсмических сигналов, регистрируемых многоканальными сейсмоприемниками (не показаны), по измерительному каналу 1 они поступают на первый вход микропроцессорного блока 2 управления, который формирует пакеты сейсмических данных с указанием (как показано выше) точного времени формирования и сохраняет их в своем запоминающем устройстве.
По завершении программы экспериментов производят считывание сейсмических данных из запоминающего устройства микропроцессорного блока управления 2 через разъем 26. Полученные записи сейсмических данных от одного или группы регистраторов, за счет включающей систему автоподстройки тактовой частоты встроенной системы синхронизации с использованием спутниковых GPS приемников, имеют высокоточную единую привязку к мировому времени.
В целом техническое решение, согласно данной группе изобретений, обеспечивает длительную, многосуточную, работу регистраторов сейсмических сигналов в автономном режиме, в том числе при отсутствии устойчивого приема сигналов точного времени, с сохранением временной синхронизации заданной точности.
Системы наблюдений, построенные с использованием автономных регистраторов сейсмических сигналов, согласно изобретению, могут состоять из мега большого количества пунктов приема, распределенных с переменной плотностью на площади исследований, которая определяется целевыми задачами, сейсмогеологическими условиями и методикой выполнения геолого-геофизических работ.
Изобретение реализовано в наземной сейсмической аппаратуре, полевой станции РОСА-А и может найти широкое применение при разработках месторождений УВ-сырья в технологиях, обеспечивающих максимально полное извлечение нефти и газа при минимизации эксплуатационных затрат, например при выполнении гидроразрыва пласта для интенсификации эксплуатационных скважин. Кроме того, данную аппаратуру можно эффективно использовать при проведении детальных глубинных исследований методом сейсмического зондирования (ГСЗ), а также для регистрации сейсмических данных высокоразрешающих съемок по системам наблюдения с многократными перекрытиями как в профильном, так и площадном вариантах, при совмещенных наземно-скважинных сейсмических работах на этапе разведки, доразведки и эксплуатации нефтяных и газовых месторождений, при проведении активного и пассивного сейсмического и сейсмологического мониторинга сейсмоопасных территорий и крупных, техногенных (инженерных) сооружений (мостов, плотин, тоннелей, шахт и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |
| АВТОНОМНЫЙ СЕЙСМОПРИЕМНИК С ЦИФРОВОЙ РЕГИСТРАЦИЕЙ СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2400777C1 |
| Устройство для возбуждения сейсмических колебаний | 1986 |
|
SU1383244A1 |
| Формирователь сигналов астрономического времени для автономных цифровых сейсмометров | 2024 |
|
RU2824343C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| Устройство, способ и машиночитаемый носитель для автономной регистрации сейсмических данных | 2024 |
|
RU2836136C1 |
| Устройство синхронизации источников сейсмических сигналов | 1980 |
|
SU1105839A1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
| РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2001 |
|
RU2205428C1 |
| СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2021 |
|
RU2777271C1 |
Изобретение относится к области сейсмической разведки, в частности к процессу проведения наземных пространственно распределенных сейсмических исследований в режиме длительных программируемых наблюдений, в том числе при выполнении пассивного сейсмического мониторинга, а также при работах в особо отдаленных районах и сложных поверхностных условиях. Техническим результатом изобретения является обеспечение высокоточной автоподстройки тактовой частоты. Сущность технического решения согласно изобретению состоит в организации автоматического измерения реальной ошибки частоты тактового генератора относительно сигналов точного времени (PPS), запоминании и использовании ее для формирования точных временных интервалов. При этом автономный регистратор дополнительно включает устройство автоматической настройки и коррекции тактовой частоты высокостабильного генератора, первый вход указанного устройства автоматической настройки и коррекции связан с генератором тактовых импульсов, второй - с выходом точного секундного импульса (синхронизирующим выходом) GPS-приемника, а выход - с третьим входом блока временной синхронизации. 2 н.п. ф-лы, 5 ил.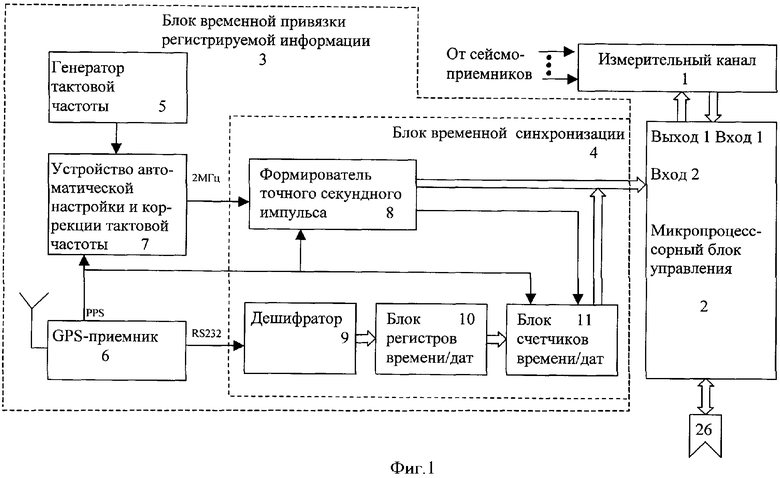
1. Автономный регистратор сейсмических сигналов, включающий микропроцессорный блок управления и регистрации, первый вход и первый выход которого связаны с измерительным каналом сейсмических сигналов, второй вход указанного микропроцессорного блока управления и регистрации связаны с выходом блока временной привязки регистрируемой информации, содержащим высокостабильный генератор тактовой частоты, GPS-приемник и блок временной синхронизации, выход которого является выходом устройства временной привязки регистрируемой информации, выход точного секундного импульса (синхронизирующий выход) GPS-приемника связан с первым входом блока временной синхронизации, второй вход блока временной синхронизации связан с информационным выходом GPS-приемника, вход-выход микропроцессорного блока управления является входом-выходом программ/данных автономного регистратора сейсмических сигналов, отличающийся тем, что блок временной привязки регистрируемой информации дополнительно включает устройство автоматической настройки и коррекции тактовой частоты, при этом первый вход указанного устройства автоматической настройки и коррекции связан с генератором тактовых импульсов, второй - с выходом точного секундного импульса (синхронизирующим выходом) GPS-приемника, а выход - с третьим входом блока временной синхронизации.
2. Устройство автоматической настройки и коррекции тактовой частоты автономного регистратора сейсмических сигналов, включающее блок формирования поправки частоты, связанный с блоком формирования выходного сигнала тактовой частоты, блок управления, первый и второй входы которого являются первым и вторым входами блока и связаны соответственно с опорным корректируемым сигналом и с эталонным сигналом (сигналом мирового точного времени), отличающееся тем, что блок формирования поправки частоты содержит соединенные последовательно связанный с третьим входом блока управления делитель частоты, регистр ошибок и формирователь импульсов коррекции, выход которого связан с первым входом блока формирования выходного сигнала тактовой частоты, тактовые входы указанных делителя, регистра ошибок, формирователя импульсов коррекции и блока формирования выходного сигнала тактовой частоты связаны с первым входом блока управления, первый выход которого связан с входом «сброс» указанного делителя частоты, а второй - с входом «занос» регистра ошибок, второй, знаковый, выход регистра ошибок связан со вторым входом блока формирования выходного сигнала тактовой частоты, выход которого является выходом устройства.
| Контрольный висячий замок с выдвижной дужкой | 1934 |
|
SU41376A1 |
| US 6472943 B1, 13.04.2001 | |||
| УСТРОЙСТВО И СПОСОБ (ВАРИАНТЫ) ХРОНИРОВАНИЯ ИНФОРМАЦИИ АВТОНОМНОЙ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 2004 |
|
RU2277298C1 |
| Устройство для регистрации сейсмической информации | 1980 |
|
SU928283A1 |

