Изобретение относится к области радиосвязи и может быть использовано в радиоэлектронных системах различного назначения в широком диапазоне частот.
Известно, что потери энергии в линиях связи в большой степени связаны с искажением поляризационной структуры полезных сигналов средой распространения. Например, в KB диапазоне в зависимости от угла между направлением распространения сигнала и направлением магнитных силовых линий поля Земли может происходить преобразование одного типа поляризации в другой [1], стр.95-98, деполяризация осадками в миллиметровом диапазоне [1], стр.111-112 и т.п.
Традиционно наиболее эффективным способом компенсации отрицательного влияния среды распространения на поляризационную структуру сигнала считается адаптивная поляризационно-временная обработка сигналов, обеспечивающая в режиме реального времени формирование оптимальных (в смысле минимума среднего квадрата ошибки) значений весовых коэффициентов, корректирующих опорный сигнал приемной антенной системы (АС) таким образом, что его поляризационные параметры (ПП) в каждый момент времени согласуются с ПП принимаемого полезного сигнала, максимально увеличивая его уровень на входе приемника.
Составной частью большинства адаптивных систем является устройство, выполняющее линейное векторное суммирование [2-4], функционирующее следующим образом.
Принимается выборка из N≫1 отсчетов вектора напряжений, поступающих с согласованных нагрузок ортогональных антенн приемной АС  ΔТ - шаг дискретизации непрерывной реализации сигнала.
ΔТ - шаг дискретизации непрерывной реализации сигнала.
Отсчетные значения  перемножаются на весовые коэффициенты
перемножаются на весовые коэффициенты  и
и  и суммируются, т.е. на выходе сумматора будут значения
и суммируются, т.е. на выходе сумматора будут значения

Здесь  - вектор оценок весовых коэффициентов
- вектор оценок весовых коэффициентов  - представляет собой амплитуду, a
- представляет собой амплитуду, a  - фазу напряжения i-компоненты выборки опорного сигнала);
- фазу напряжения i-компоненты выборки опорного сигнала);  - оценка k-ого отсчета полезного сигнала; «+» - знак транспонирования, nk - отсчет неполяризованного белого шума с корреляционной матрицей
- оценка k-ого отсчета полезного сигнала; «+» - знак транспонирования, nk - отсчет неполяризованного белого шума с корреляционной матрицей

где N0 - спектральная плотность мощности шума; I - единичная матрица; δij - символ Кронекера;  - символ усреднения.
- символ усреднения.
Определяется невязка или ошибка, т.е. разность между отсчетами принимаемого и эталонного сигналов

Определяется  как вектор взаимной корреляции эталонного сигнала
как вектор взаимной корреляции эталонного сигнала  и вектора входных сигналов
и вектора входных сигналов 

Вводится корреляционная матрица 
Определяется выражение для среднего квадрата ошибки:

Вычисляется градиент функции (6) 

Находится оптимальный вектор весовых коэффициентов  из условия равенства нулю (7), откуда
из условия равенства нулю (7), откуда

(уравнение Винера-Хопфа в векторной записи), при котором

т.е. оцениваемое значение отсчета выборки напряжения полезного сигнала равно отсчетному значению напряжения выборки его истинного значения.
Выбор  в соответствии с (8) приводит к определенным практическим трудностям, в частности, требуется обращение матрицы (5), что трудно реализуемо при большой размерности выборки. Поэтому большинство адаптивных способов обработки полезного сигнала на приемной стороне, в том числе и поляризационно-временные, базируются на алгоритмах нахождения минимума
в соответствии с (8) приводит к определенным практическим трудностям, в частности, требуется обращение матрицы (5), что трудно реализуемо при большой размерности выборки. Поэтому большинство адаптивных способов обработки полезного сигнала на приемной стороне, в том числе и поляризационно-временные, базируются на алгоритмах нахождения минимума  Уидроу-Хоффа [2-4], представляющих собой способ нахождения приближенного замкнутого решения (8). Точность данного способа ограничивается длиной статистической выборки (N), так как вычисление весовых коэффициентов основано на измерении входных сигналов в реальном масштабе времени.
Уидроу-Хоффа [2-4], представляющих собой способ нахождения приближенного замкнутого решения (8). Точность данного способа ограничивается длиной статистической выборки (N), так как вычисление весовых коэффициентов основано на измерении входных сигналов в реальном масштабе времени.
Наиболее близким по технической сущности к предлагаемому является способ адаптивной поляризационно-временной обработки сигналов, описанный в [5] на стр.160-162, 174-176, принятый за прототип.
Способ-прототип заключается в следующем.
Реализуется алгоритм нахождения минимума  методом наискорейшего спуска, согласно которому [3]
методом наискорейшего спуска, согласно которому [3]

Здесь μ=const, причем для градиентных методов при  произвольное начальное значение вектора
произвольное начальное значение вектора  всегда в среднем устойчиво сходится к значению
всегда в среднем устойчиво сходится к значению  , при котором
, при котором

т.е. оцениваемое значение полезного сигнала равно его истинному значению. Таким образом, при 
При восстановлении сигнала на выходе адаптивного приемника

 При этом
При этом

где δ(t2-t1) - дельта-функция Дирака, и на выходе адаптивного приемника формируется эффект, пропорциональный логарифму функционала отношения правдоподобия, усредненному по несущественным параметрам. Тогда при условии (12) с учетом (1) и (11) можно записать

Погрешность адаптации определяется дисперсией оценок весовых коэффициентов. С другой стороны, т.к. ПП опорного сигнала равны оценочным значениям ПП полезного сигнала в базисе приемной АС, т.е. 
 которые, в свою очередь, определяются значениями
которые, в свою очередь, определяются значениями  и
и  то для получения количественных результатов удобно погрешность адаптации определить через дисперсии оценок ПП полезного сигнала
то для получения количественных результатов удобно погрешность адаптации определить через дисперсии оценок ПП полезного сигнала  и
и  Для нахождения и
Для нахождения и  выразим полезный и опорный сигналы в (14) через их ПП в круговом базисе с учетом того, что
выразим полезный и опорный сигналы в (14) через их ПП в круговом базисе с учетом того, что  :
:


где  - комплексная функция модуляции; а0, ϕ0 - амплитуда и фаза сигнала.
- комплексная функция модуляции; а0, ϕ0 - амплитуда и фаза сигнала.
При релеевском распределении амплитуды полезного сигнала и равномерном распределении его начальной фазы усредненный по этим параметрам функционал отношения правдоподобия запишется

Здесь  ,
,  - векторы ПП опорного и полезного сигналов соответственно.
- векторы ПП опорного и полезного сигналов соответственно.
При воздействии неполяризованного белого шума параметры К0, β0 являются неэнергетическими, т.е. в качестве выходного эффекта приемника для оценки ПП сигнала можно взять модуль корреляционного интеграла из (17). Согласно [6] дисперсии этих оценок запишутся



 - отношение удвоенной энергии сигнала к спектральной плотности мощности шума на выходе адаптивного приемника (сигнал/шум).
- отношение удвоенной энергии сигнала к спектральной плотности мощности шума на выходе адаптивного приемника (сигнал/шум).
Находится полная характеристика точности оценки ПП сигнала (обобщенная дисперсия [6, 7]):

Нормированная на Q0 зависимости (20) приведена на фиг.1 жирной пунктирной линией.
Опорный и полезный сигналы согласованы по направлению вращения векторов полей и формально отношение сигнал/шум на выходе приемника для адаптивного способа с учетом погрешностей оценок ПП запишется [8]: 
Q+(K0) характеризует минимальные потери, Q-(K0) - максимальные. Но в любом сечении  в произвольный момент времени значение
в произвольный момент времени значение  может равновероятно находится между Q+(K0) и Q-(K0), т.е. плотность вероятности
может равновероятно находится между Q+(K0) и Q-(K0), т.е. плотность вероятности
и

В качестве примера нормированные на Q0 зависимости (21) с учетом усреднения (22) приведены тонкими линиями на фиг.2 (Q0=10) и фиг.3 (Q0=100).
Анализ описанного выше способа-прототипа показывает, что ему присущи следующие недостатки.
- Неопределенность оценки β0 при |K0|→1 приводит к тому, что В(К0,β0)→∞, что определяет рост энергетических потерь в линии связи.
- Необходимость использования отсчетных значений как амплитуд, так и начальных фаз ортогональных компонентов полезного сигнала предъявляет жесткие требования к точности оценок.
- Для непрерывной регулировки амплитуд и фаз компонентов опорного сигнала, т.е.  и
и  , необходимы два управляемых аттенюатора и два управляемых фазовращателя, что усложняет реализацию устройства поляризационной обработки сигналов.
, необходимы два управляемых аттенюатора и два управляемых фазовращателя, что усложняет реализацию устройства поляризационной обработки сигналов.
Адаптация опорного сигнала требует наличия эталонного сигнала и его многократного сравнения с сигналом на выходе схемы регулировки весовых коэффициентов, что сказывается на продолжительности процесса адаптации.
Для устранения указанных недостатков в предлагаемом способе обработки сигналов, заключающемся в приеме отсчетов напряжений выборки полезного сигнала, перемножении этих отсчетов с весовыми коэффициентами опорного сигнала приемной АС, согласно изобретению принимаемую выборку отсчетов полезного сигнала перемножают с весовыми коэффициентами опорного сигнала ортогонально-кругового ПБ, фильтрацией выделяют низкочастотные амплитуды напряжений квадратурных составляющих поляризационно-ортогональных компонент принимаемого сигнала на промежутке времени наблюдения, определяют значения амплитуд, производят оценку ПП сигнала в ортогонально-круговом ПБ, по результатам которой переходят для приема сигнала в тот или иной ПБ, где перемножают принимаемые отсчеты напряжения полезного сигнала либо на постоянные весовые коэффициенты ортогонально-кругового ПБ, либо на оценочные значения весовых коэффициентов ортогонально-линейного ПБ, в ортогонально-круговом ПБ осуществляется прием наибольшей из ортогонально-круговых компонент сигнала, в ортогонально-линейном ПБ - компоненты эллиптически поляризованного сигнала, численно равной большей из полуосей эллипса поляризации сигнала.
Предлагаемый способ квазиадаптивной поляризационно-временной обработки сигналов заключается в следующем.
Принимается выборка из N отсчетов вектора напряжений 
Оценка ПП полезного сигнала всегда осуществляется в ортогонально-круговом ПБ [6]. Геометрия приема сигнала в ортогонально-круговом ПБ приведена на фиг.4(а). При этом  .
.
В течение времени 0-T выделяются квадратурные составляющие ортогонально-круговых компонент отсчетов напряжения полезного сигнала, происходит накопление отсчетов напряжения этих составляющих выборки, определяются их низкочастотные амплитуды и в блоке оценки ПП осуществляется оценка коэффициента эллиптичности K0 и угла ориентации эллипса поляризации β0 полезного сигнала и знаки величин signK0, signβ0, 


При N≫1



Если  , то производится прием отсчетов напряжения максимальной круговой компоненты полезного сигнала. При этом формируется опорный сигнал с величиной коэффициента эллиптичности |Коп|=1 и signKоп=sign
, то производится прием отсчетов напряжения максимальной круговой компоненты полезного сигнала. При этом формируется опорный сигнал с величиной коэффициента эллиптичности |Коп|=1 и signKоп=sign (если sign
(если sign , то принимается правополяризованная компонента сигнала, при sign
, то принимается правополяризованная компонента сигнала, при sign - левополяризованная компонента). Здесь
- левополяризованная компонента). Здесь  - оценка коэффициента эллиптичности принимаемого сигнала. Если , то происходит прием отсчетов напряжения максимальной составляющей эллиптически поляризованного полезного сигнала в ортогонально-линейном ПБ, численно равной длине большей из полуосей эллипса поляризации полезного сигнала. При этом Kоп=0. Геометрия приема сигнала в ортогонально-линейном ПБ представлена на фиг.4(б). С учетом знака sign
- оценка коэффициента эллиптичности принимаемого сигнала. Если , то происходит прием отсчетов напряжения максимальной составляющей эллиптически поляризованного полезного сигнала в ортогонально-линейном ПБ, численно равной длине большей из полуосей эллипса поляризации полезного сигнала. При этом Kоп=0. Геометрия приема сигнала в ортогонально-линейном ПБ представлена на фиг.4(б). С учетом знака sign формируется опорный сигнал линейной поляризации с вектором поля, ориентированным так же, как большая полуось эллипса поляризации полезного сигнала. При этом
формируется опорный сигнал линейной поляризации с вектором поля, ориентированным так же, как большая полуось эллипса поляризации полезного сигнала. При этом  ,
,  или π (в зависимости от значения sign: если sign=«+», то αrg=0, если же sign=«-», то
или π (в зависимости от значения sign: если sign=«+», то αrg=0, если же sign=«-», то  . Здесь a1 и а2 - амплитуды ортогональных компонентов полезного сигнала в ортогонально-линейном ПБ приемной АС. На следующем промежутке Т-2T снова производятся оценки , , sing и sing. Если , то происходит то же, что приведено в предыдущем абзаце. Если же , то вновь происходит прием отсчетов напряжения максимальной из ортогонально-круговых компонент полезного сигнала в ортогонально-круговом ПБ и далее все повторяется сначала. Прием полезного сигнала происходит то в ортогонально-круговом ПБ, то в ортогонально-линейном и блок управления должен в соответствующие моменты времени, исходя из оценки ПП сигнала, осуществлять переход из одного ПБ в другой. Значение К° определяется из равенства отношений сигнал/шум для ортогонально-кругового ПБ и ортогонально-линейного ПБ на одном и том же промежутке наблюдения iT-(i+1)T в предположении идеальной оценки ПП сигнала [8]:
. Здесь a1 и а2 - амплитуды ортогональных компонентов полезного сигнала в ортогонально-линейном ПБ приемной АС. На следующем промежутке Т-2T снова производятся оценки , , sing и sing. Если , то происходит то же, что приведено в предыдущем абзаце. Если же , то вновь происходит прием отсчетов напряжения максимальной из ортогонально-круговых компонент полезного сигнала в ортогонально-круговом ПБ и далее все повторяется сначала. Прием полезного сигнала происходит то в ортогонально-круговом ПБ, то в ортогонально-линейном и блок управления должен в соответствующие моменты времени, исходя из оценки ПП сигнала, осуществлять переход из одного ПБ в другой. Значение К° определяется из равенства отношений сигнал/шум для ортогонально-кругового ПБ и ортогонально-линейного ПБ на одном и том же промежутке наблюдения iT-(i+1)T в предположении идеальной оценки ПП сигнала [8]:

Откуда  , т.е.
, т.е. 

Погрешности измерения ПП мало отличаются при измерениях в любом ПБ. Например, при оценке ПП в ортогонально-линейном ПБ дисперсии оценок ПП будут
В нашем случае измерение ПП сигнала всегда производится в ортогонально-круговом ПБ. Тогда дисперсии оценок ПП сигнала будут примерно такие же, как и для адаптивного поляризационного приема, определенные выше. Обобщенная дисперсия оценок ПП при квазиадаптивном приеме запишется
Нормированные на Q0 зависимости (30) показаны на фиг.1 жирными сплошными линиями (верхняя жирная сплошная линия при оценке ПП сигнала в обобщенном ПБ, нижняя - в ортогонально-линейном ПБ). Как видно величина В' в обоих случаях ограничена во всем диапазоне возможных значений K0 и почти везде меньше величины В, за исключением области, прилегающей к значению K0, близкому к нулю. Это должно положительно отразиться на эффективности приема.
Учитывая, что  ,
,  для квазиадаптивного способа выходное отношение сигнал/шум будет [8]:
для квазиадаптивного способа выходное отношение сигнал/шум будет [8]:

Нормированные на Q0 зависимости (31) приведены на фиг.2 и фиг.3 сплошными жирными линиями для двух значений Q0 и для значений обобщенной дисперсии оценок ПП сигнала при оценке ПП в обобщенном и ортогонально-линейном ПБ приемной АС (левые рисунки на фиг.2 и 3 при оценки ПП сигнала в обобщенном ПБ, правые - в ортогонально-линейном ПБ). Видно, что вид ПБ, в котором проводится оценка ПП сигнала, практически не влияет на потери энергии приема.
Квазиадаптивный способ поляризационной обработки сигнала по энергетической эффективности практически не проигрывает способу-прототипу. Разрывы на кривых (31) при |К0|=|К0| характеризуют потери, связанные с погрешностью измерений ПП полезного сигнала. Однако при увеличении Q0 эти потери уменьшаются.
Этот способ не требует эталонного сигнала. Кроме того, не производится оценка фаз ортогональных компонентов полезного сигнала, следовательно, предъявляются менее жесткие требования к оценке ПП сигналов. При этом вместо управляемых фазовращателей используются фазосдвигающие элементы на  и π, что упрощает реализацию предлагаемого устройства.
и π, что упрощает реализацию предлагаемого устройства.
Известны устройства для измерения (оценки) ПП радиоволн, например, [9, 10]. Недостатком первого устройства является то, что реализуется оценка только одного параметра - коэффициента эллиптичности сигнала. Недостатком второго устройства - невысокая точность измерения ПП радиоволн.
Основой предлагаемого устройства является блок оценки коэффициента эллиптичности и угла ориентации эллипса поляризации полезного сигнала, поэтому в качестве прототипа удобно взять устройство, выполняющее эту функцию.
Наиболее близким по технической сущности к предлагаемому является устройство [11], принятое за прототип.
Блок-схема устройства-прототипа приведена на фиг.5, где обозначено:
1, 2, 3 - первый, второй и третий ортогональные датчики;
4 - блок усилителей;
5-10 - усилители;
11 - блок определения амплитуд сигналов;
12 - блок определения поляризационных параметров;
13 - блок регистрации;
14-16 - гибридные соединения;
17-19 - фазосдвигающие элементы;
20-25 - измерители амплитуд.
Устройство-прототип содержит три ортогональных датчика 1, 2, 3, блок усилителей 4 с усилителями 5-10, блок определения амплитуд сигналов 11 с измерителями амплитуд 20-25, входы которого подключены к выходам усилителей 5-10, блок определения поляризационных параметров 12, выходы которого соединены с входами блока регистрации 13 и три гибридных соединения 14-16, первые входы которых подсоединены к выходам датчиков 1-3, вторые входы через фазосдвигающие элементы 17-19 - к выходам датчиков 2, 3 и 1, а выходы гибридных соединений 14-16 соединены с входами усилителей 5 и 6, 7 и 8, 9 и 10 блока усилителей 4.
Работает устройство-прототип следующим образом.
Высокочастотный сигнал E1(t)=A1(t)cos(ωt-ϕ1), где А1 - амплитуда первой компоненты электрического поля, ϕ1- ее фаза, ω - несущая частота, с выхода датчика 1 поступает на вход гибридного соединения 14. На второй вход последнего с выхода датчика 2 через фазосдвигающий элемент 17, обеспечивающий сдвиг фазы на  , поступает сигнал E2(t)=A2(t)cos(ωt-ϕ2-
, поступает сигнал E2(t)=A2(t)cos(ωt-ϕ2- ), где A2, ϕ2 - амплитуда и фаза второй компоненты напряженности электрического поля. С суммарного выхода гибридного соединения 14 сигнал
), где A2, ϕ2 - амплитуда и фаза второй компоненты напряженности электрического поля. С суммарного выхода гибридного соединения 14 сигнал  поступает через усилитель 5 на вход измерителя амплитуды 20 блока 11, с выхода которого низкочастотный сигнал
поступает через усилитель 5 на вход измерителя амплитуды 20 блока 11, с выхода которого низкочастотный сигнал

поступает на вход блока 12. С разностного выхода гибридного соединения 14 сигнал  поступает через усилитель 6 на вход измерителя амплитуды 21, с выхода которого низкочастотный сигнал
поступает через усилитель 6 на вход измерителя амплитуды 21, с выхода которого низкочастотный сигнал

подается также на блок 12. Аналогично на другие входы блока 12 через гибридные соединения 15 и 16, усилители 7-10 и измерители амплитуд 22-25 подаются низкочастотные сигналы U3, U4, U5, U6, где А3, и ϕ3 - амплитуда и фаза третьей компоненты напряженности электрического поля, регистрируемой датчиком 3. Блок 12 вырабатывает напряжения, пропорциональные косинусу угла места Θ, косинусу и синусу азимутального угла ориентации нормали к плоскости эллипса поляризации ϕ, коэффициенту эллиптичности К и косинусу удвоенного угла наклона большой полуоси эллипса 2β, осуществляя преобразования выходных сигналов U1-U6 в функции поляризационных параметров электромагнитной волны.
Выработанные блоком 12 напряжения, пропорциональные cosΘ, cosϕ, sinϕ, К и cos2β, подаются на вход блока регистрации 13.
Недостатком устройства-прототипа является ограниченность функциональных возможностей и обязательное наличие третьего канала приема.
Для устранения указанного недостатка в устройство квазиадаптивной поляризационно-временной обработки сигналов, содержащее последовательно соединенные первый датчик поляризационно-ортогональных компонентов сигнала, первый сумматор, первый усилитель и первый блок определения амплитуд, два выхода которого соединены с соответствующими входами блока определения поляризационных параметров (БОПП), последовательно соединенные второй датчик поляризационно-ортогональных компонентов сигнала, второй сумматор, второй усилитель и второй блок определения амплитуд, два выхода которого соединены с соответствующими входами БОПП, при этом первый вход первого сумматора соединен с входом первого фазосдвигающего элемента на , выход которого соединен со вторым входом второго сумматора, первый вход которого соединен с входом второго фазосдвигющего элемента на , выход которого соединен со вторым входом первого сумматора, согласно изобретению введены последовательно соединенные первый блок переключения (БП), первый управляемый аттенюатор (УАТ), третий БП, третий фазосдвигающий элемент на π и первый ключ, выход которого соединен с первым входом третьего сумматора, выход которого является выходом устройства, кроме того, последовательно соединенные второй БП, второй управляемый аттенюатор (УАТ) и второй ключ, выход которого соединен со вторым входом третьего сумматора, причем первые входы первого и второго БП подсоединены к выходам первого и второго датчиков соответственно, а вторые входы первого и второго БП соединены с выходами первого и второго сумматоров соответственно, выходы БОПП соединены с соответствующими входами блока управления (БУ), первый и второй выходы которого соединены со вторыми входами первого и второго УАТ соответственно, третий выход БУ соединен со вторым входом третьего БП, второй выход которого соединен с выходом третьего фазосдвигающего элемента на π, два выхода блока установки начального состояния соединены с соответствующими входами БУ, четвертый и пятый выходы которого соединены со вторыми входами первого и второго ключей соответственно, шестой и седьмой выходы БУ соединены с третьими входами первого и второго БП соответственно, вторые выходы первого и второго БП соединены с первыми входами первого и второго ключей, соответственно, вход блока установки начального состояния является входом для импульсов запуска.
Блок-схема предлагаемого устройства представлена на фиг.6, где обозначено:
1, 2 - первый и второй датчики поляризационно-ортогональных компонентов сигнала;
3, 4 - первый и второй ключи;
5, 6, 12 - первый, второй и третий блоки переключения (БП);
7 - блок управления (БУ);
8, 9 - первый и второй управляемые аттенюаторы (УАТ);
10, 11 - первый и второй фазосдвигающие элементы на ;
13 - фазосдвигающий элемент на π;
14, 15, 21 - первый, второй и третий сумматоры;
16 - блок определения поляризационных параметров (БОПП);
17, 18 - первый и второй усилители;
19, 20 - первый и второй блоки определения амплитуд квадратурных составляющих ортогонально-круговых компонент полезного сигнала;
22 - блок установки начального состояния.
Предлагаемое устройство содержит последовательно соединенные первый датчик 1, первый БП 5, первый УАТ 8, третий БП 12, третий фазосдвигающий элемент на π 13, первый ключ 3, выход которого соединен с первым входом третьего сумматора 21, выход которого является выходом устройства. Кроме того, последовательно соединенные второй датчик 2, второй БП 6, второй УАТ 9, второй ключ 4, выход которого соединен со вторым входом третьего сумматора 21. А также последовательно соединенные первые сумматор 14, усилитель 17 и блок определения амплитуд 19, два выхода которого соединены с соответствующими входами БОПП 16, выходы которого соединены с соответствующими входами БУ 7, первый, второй и третий выходы которого соединены со вторыми входами первого 8 и второго 9 УАТ и третьего БП 12, второй выход которого соединен с выходом третьего фазосдвигающего элемента на π 13. Последовательно соединенные вторые сумматор 15, усилитель 18 и блок определения амплитуд 20, два выхода которого соединены с соответствующими входами БОПП 16. При этом выход первого датчика 1 соединен с входами первого сумматора 14 и первого фазосдвигающего элемента на 10, выход которого соединен со вторым входом второго сумматора 15, первый вход которого соединен с выходом второго датчика 2 и входом второго фазосдвигающего элемента на 11, выход которого соединен со вторым входом первого сумматора 14. Вторые выходы первого БП 5 и второго БП 6 соединены с первыми входами первого 3 и второго 4 ключей соответственно. Кроме того, четвертый и пятый выходы БУ 7 соединены со вторыми входами первого 3 и второго 4 ключей соответственно, а выходы 6 и 7 - с третьими входами БП 5 и БП 6 соответственно. Причем два выхода блока установки начального состояния 22 соединены с соответствующими входами БУ 7, вход блока 22 является входом для импульсов запуска.
Предлагаемое устройство работает следующим образом.
При поступлении на вход блока 22 импульса запуска, определяющего начало работы устройства, блок 22 формирует импульсные напряжения, поступающие на соответствующие входы БУ 7, с выходов которого поступают импульсы на входы БП 5 и 6, которые подключают вторые выходы этих блоков к входам сумматора 21 и закрывают на время первой оценки ПП сигнала ключи 3 и 4. С выхода датчиков 1 и 2 отсчеты напряжения поляризационно-ортогональных компонентов полезного сигнала U1kcos(ωtk+ϕ1k) и U2kcos(ωtk+ϕ2k) поступают на первые входы сумматоров 14 и 15 соответственно. Одновременно отсчеты напряжения U1kcos(ωtk+ϕ1k) с выхода датчика 1 через фазосдвигающий элемент 10 поступают на второй вход сумматора 15, а отсчеты напряжения U2kcos(ωtk+ϕ2k) с выхода датчика 2 поступают через фазосдвигающий элемент 11 на второй вход сумматора 14. Здесь U1k, U2k, ϕ1k, ϕ2k - амплитуды и фазы отсчетных напряжений ортогональных компонентов входного полезного сигнала.
С выходов этих сумматоров 14 и 15 отсчеты напряжений поляризованных по кругу компонентов полезного сигнала поступают на входы усилителей 17 и 18, где они усиливаются и подаются на входы блоков 19 и 20. С выходов блоков 19 и 20 на соответствующие входы БОПП 16 поступают низкочастотные напряжения

Индекс «п» относится к правополяризованной компоненте сигнала, индекс «л» относится к левополяризованной компоненте. Соответственно,




В блоке БОПП 16 вычисляются оценочные значения ПП сигнала и функций от них:

оценка коэффициента эллиптичности полезного сигнала; его модуль  ; sing
; sing - знак коэффициента эллиптичности; знак разности sign
- знак коэффициента эллиптичности; знак разности sign ; оценка угла ориентации эллипса поляризации сигнала
; оценка угла ориентации эллипса поляризации сигнала
 ;
;
ее знак sign
и значения  . Здесь
. Здесь 

Если sign , то это значение и sign
, то это значение и sign , поступает в блок 7.
, поступает в блок 7.
При этом с выходов блока 7 на вторые входы ключей 3, 4 поступают импульсы, открывающие один из этих ключей и закрывающие другой. Так, если sign , то амплитуда правополяризованной компоненты сигнала будет наибольшей, следовательно, ключ 3 будет открыт, а ключ 4 - закрыт и с выхода сумматора 21 на дальнейшую частотно-временную обработку поступят отсчеты напряжения правополяризованной компоненты сигнала. Амплитуда отсчета этой компоненты
, то амплитуда правополяризованной компоненты сигнала будет наибольшей, следовательно, ключ 3 будет открыт, а ключ 4 - закрыт и с выхода сумматора 21 на дальнейшую частотно-временную обработку поступят отсчеты напряжения правополяризованной компоненты сигнала. Амплитуда отсчета этой компоненты
Если же sign  , то ключ 3 будет закрыт, ключ 4 - открыт и с выхода сумматора 21 поступят отсчеты напряжения левополяризованной компоненты сигнала с амплитудным значением
, то ключ 3 будет закрыт, ключ 4 - открыт и с выхода сумматора 21 поступят отсчеты напряжения левополяризованной компоненты сигнала с амплитудным значением  .
.
Если же sign , то с выходов блока 16 на соответствующие входы блока 7 поступают сигналы, по которым с выходов блока 7 выходят импульсы, открывающие ключи 3, 4; переключающие в блоках 5 и 6 вторые выходы на первые; подключающие в блоке 12 либо выход 1, либо выход 2. Если sign
, то с выходов блока 16 на соответствующие входы блока 7 поступают сигналы, по которым с выходов блока 7 выходят импульсы, открывающие ключи 3, 4; переключающие в блоках 5 и 6 вторые выходы на первые; подключающие в блоке 12 либо выход 1, либо выход 2. Если sign , то будет подключен выход 2 блока 12, если же sign
, то будет подключен выход 2 блока 12, если же sign , то будет подключен выход 1 блока 12, (т.е. фазосдвигающий элемент на π). На соответствующие входы блока 7 подаются значения . В блоке 7 формируются управляющие напряжения
, то будет подключен выход 1 блока 12, (т.е. фазосдвигающий элемент на π). На соответствующие входы блока 7 подаются значения . В блоке 7 формируются управляющие напряжения  , которые подаются на вторые входы УАТ 8 и 9. При этом вектор поля опорного сигнала ориентируется так же, как и большая полуось эллипса поляризации полезного сигнала. Здесь U0 - управляющее напряжение, соответствующее минимальному ослаблению УАТ. Тогда с выхода сумматора 21 на дальнейшую частотно-временную обработку поступят отсчеты напряжения полезного сигнала с амплитудными значениями
, которые подаются на вторые входы УАТ 8 и 9. При этом вектор поля опорного сигнала ориентируется так же, как и большая полуось эллипса поляризации полезного сигнала. Здесь U0 - управляющее напряжение, соответствующее минимальному ослаблению УАТ. Тогда с выхода сумматора 21 на дальнейшую частотно-временную обработку поступят отсчеты напряжения полезного сигнала с амплитудными значениями

т.е. численно равными длине большей из полуосей эллипса поляризации полезного сигнала. Прием сигнала в линейном поляризационном базисе будет продолжен до тех пор, пока sign . Если это неравенство нарушится, то с выхода блока 16 на соответствующий вход блока 7 поступит сигнал, по которому с выходов блока 7 выйдут импульсы, осуществляющие переход в ортогонально-круговой базис приема, и все описанное выше повторится с начала. Таким образом, пока sign
. Если это неравенство нарушится, то с выхода блока 16 на соответствующий вход блока 7 поступит сигнал, по которому с выходов блока 7 выйдут импульсы, осуществляющие переход в ортогонально-круговой базис приема, и все описанное выше повторится с начала. Таким образом, пока sign прием отсчетов напряжения максимальной круговой компоненты сигнала осуществляется в круговом базисе. В противном случае в линейном базисе производится прием отсчетов напряжения максимальной компоненты эллиптически поляризованного полезного сигнала.
прием отсчетов напряжения максимальной круговой компоненты сигнала осуществляется в круговом базисе. В противном случае в линейном базисе производится прием отсчетов напряжения максимальной компоненты эллиптически поляризованного полезного сигнала.
При поступлении на вход блока 22 импульса выключения бинарный счетчик обнуляется и устройство готово к приему нового сообщения.
В предлагаемом устройстве в отличие от прототипа не используются гибридные соединения, так как нет необходимости в получении разности амплитуд поляризационно-ортогональных компонентов полезного сигнала.
Таким образом, предлагаемое устройство проще в схемотехническом исполнении, чем устройство адаптивной поляризационной обработки сигналов. Помехоустойчивость систем связи, осуществляющих квазиадаптивный поляризационный прием сигналов, не ниже, чем помехоустойчивость систем связи, реализующих адаптивный поляризационный прием, что характеризуется отношением сигнал/шум на выходе приемников данных систем связи, и к точности оценки ПП сигнала предъявляются менее жесткие требования.
Реализация блоков предлагаемого устройства не представляет затруднений, т.к. схемные решения блоков общеизвестны. Ключи 3, 4, сумматоры 14, 15, 21 являются часто используемыми в различных авторских свидетельствах и патентах, например в [12, 13].
Кроме того, для СВЧ диапазона выполнение блоков 14, 15 и 21 может быть таким же, как в [14], а принципы выполнения и работа блоков 3, 4 и 14, 15, 21 приведены в [15 стр.178, рис.6.10(а) и стр.330, рис.15.4 соответственно]. Схемотехническое выполнение и работа блоков 5, 6, 12 также приведены в [15 стр.182, рис.6.16].
Блоки 8 и 9 использовались для работы в различных диапазонах рабочих частот, например для миллиметрового диапазона длин волн в [16-17], для УКВ диапазона - в [12, 13].
Блоки 1, 2, 10, 11, 16, 17, 18, 19, 20 соответствуют аналогичным блокам устройства-прототипа. Отличие блока 16 от блока в прототипе заключается в том, что результаты оценки ПП поступают не в блок регистрации, а непосредственно в блок управления 7.
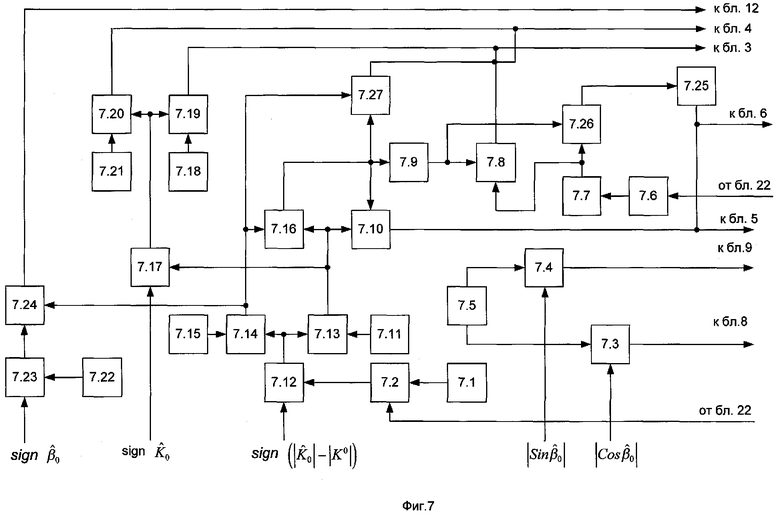
Схема блока управления 7 представлена на фиг.7, где обозначено:
7.1 - блок постоянного хранения нуля;
7.11, 7.18, 7.22 - первый, второй и третий блоки постоянного хранения единицы;
7.15, 7.21 - первый и второй блоки постоянного хранения минус единицы;
7.13, 7.14, 7.19, 7.20, 7.23 - первый, второй, третий, четвертый и пятый блоки сравнения (БС);
7.2. 7.8, 7.10, 7.17, 7.24, 7.26, 7.27 - первый - седьмой ключи;
7.3, 7.4 - первый и второй перемножители;
7.7, 7.9, 7.25 - первый, второй и третий логические элементы НЕ;
7.16 - сумматор по модулю 2;
7.5 - блок напряжения;
7.6 - линия задержки;
7.12 - блок оперативного хранения текущих значений sign (БОХТЗ).
(БОХТЗ).
Блок управления (БУ) 7 содержит последовательно соединенные блок постоянного хранения нуля 7.1, первый ключ 7.2 и БОХТЗ 7.12, выход которого соединен с первыми входами первого 7.13 и второго 7.14 БС соответственно. При этом выход первого блока постоянного хранения единицы 7.11 соединен со вторым входом первого БС 7.13, а выход первого блока постоянного хранения минус единицы 7.15 соединен со вторым входом второго БС 7.14. Последовательно соединенные пятый БС 7.23 и пятый ключ 7.24, выход которого является третьим выходом БУ 7. Кроме того, выход третьего блока постоянного хранения единицы 7.22 соединен со вторым входом пятого БС 7.23. Выход второго БС 7.14 соединен со вторыми входами пятого ключа 7.24, сумматора по модулю 2 7.16 и седьмого ключа 7.27, первый вход которого соединен с выходом сумматора по модулю 2 7.16, входом второго логического элемента НЕ 7.9 и вторым входом третьего ключа 7.10, первый вход которого соединен с первым входом сумматора по модулю 2 7.16, выходом первого БС 7.13 и вторым входом второго ключа 7.17, выход которого соединен с первыми входами третьего 7.19 и четвертого 7.20 БС. При этом выход второго блока постоянного хранения единицы 7.18 соединен со вторым входом третьего БС 7.19. Выход второго блока постоянного хранения минус единицы 7.21 соединен со вторым входом четвертого БС 7.20. Кроме того, два выхода блока напряжения 7.5 соединены со вторыми входами первого 7.3 и второго 7.4 перемножителей соответственно и являются выходами 1 и 2 БУ 7. А также последовательно соединенные линия задержки 7.6, первый логический элемент НЕ 7.7, шестой ключ 7.26 и третий логический элемент НЕ 7.25, выход которого соединен с выходом третьего ключа 7.10 и является выходами 6 и 7 БУ 7. Кроме того, выход второго логического элемента НЕ 7.9 соединен со вторыми входами второго 7.8 и шестого 7.26 ключей. При этом выход первого логического элемента НЕ 7.7 соединен с первым входом второго ключа 7.8, выход которого соединен с выходами седьмого ключа 7.27, третьего БС 7.19 и четвертого БС 7.20, являющиеся выходами 4 и 5 БУ 7. Причем первый вход первого перемножителя 7.3 является входом для  , первый вход второго перемножителя 7.4 является входом для
, первый вход второго перемножителя 7.4 является входом для  . Второй вход БОХТЗ 7.12 является входом для sign
. Второй вход БОХТЗ 7.12 является входом для sign , первый вход четвертого ключа 7.17 является входом для sign
, первый вход четвертого ключа 7.17 является входом для sign , первый вход пятого БС 7.23 - для sign
, первый вход пятого БС 7.23 - для sign .
.
Блок управления 7 работает следующим образом. В момент включения на вход линии задержки 7.6 подается логическая единица, которая с выхода линии задержки 7.6 через логический элемент НЕ 7.7 поступает на первые входы ключей 7.8, 7.26. Одновременно на второй вход первого ключа 7.2 также поступает логическая единица на время одного тактового импульса. При этом ключ 7.2 открывается и через него на первый вход блока 7.12 с выхода блока 7.1 подается нуль. Следовательно, с выходов блоков 7.13 и 7.14 выйдут логические нули, с выхода блока 7.16 - логический нуль, который закроет ключ 7.10, а с выхода логического элемента НЕ 7.9 на вторые входы ключей 7.8 и 7.26 поступит логическая единица, открывая их для прохождения задержанного управляющего импульса (логического нуля), поступившего из блока установки начального состояния 22 (фиг.8). Этот логический нуль с соответствующих выходов блока 7 поступит на вторые входы ключей 3, 4 предлагаемого устройства (фиг.6) и закроет их на время первой оценки ПП сигнала. Одновременно этот импульс через логический элемент НЕ 7.25 с соответствующих выходов блока 7 поступит на управляющие входы блоков 5, 6 предлагаемого устройства (фиг.6), подключая вторые выходы в этих блоках, а логические нули с выходов блоков 7.13 и 7.14 закроют ключи 7.17, 7.24, 7.27. Таким образом, будет подготовлен прием полезного сигнала в ортогонально-круговом ПБ.
Если после оценки ПП сигнала sign , то с выхода блока 7.13 выйдет логическая единица, а с выхода блока 7.14 - логический нуль. При этом ключи 7.24, 7.27 будут закрыты, ключ 7.17 - открыт, с выхода блока 7.16 логическая единица откроет ключ 7.10 и одновременно через элемент НЕ 7.9 закроет ключи 7.8, 7.26. С выхода ключа 7.10 логическая единица поступит на третьи входы блоков 5 и 6 (фиг.6), подключая вторые входы блоков 5 и 6. Одновременно, если sign
, то с выхода блока 7.13 выйдет логическая единица, а с выхода блока 7.14 - логический нуль. При этом ключи 7.24, 7.27 будут закрыты, ключ 7.17 - открыт, с выхода блока 7.16 логическая единица откроет ключ 7.10 и одновременно через элемент НЕ 7.9 закроет ключи 7.8, 7.26. С выхода ключа 7.10 логическая единица поступит на третьи входы блоков 5 и 6 (фиг.6), подключая вторые входы блоков 5 и 6. Одновременно, если sign , то с выхода ключа 7.17 выходит единица и поступает на входы блоков сравнения 7.19 и 7.20. При этом с выхода блока 7.19 выйдет логическая единица, а с выхода блока 7,20 - логический нуль. Следовательно, ключ 3 (фиг.6) будет открыт, ключ 4 - закрыт и будет происходить прием правополяризованной компоненты сигнала.
, то с выхода ключа 7.17 выходит единица и поступает на входы блоков сравнения 7.19 и 7.20. При этом с выхода блока 7.19 выйдет логическая единица, а с выхода блока 7,20 - логический нуль. Следовательно, ключ 3 (фиг.6) будет открыт, ключ 4 - закрыт и будет происходить прием правополяризованной компоненты сигнала.
Если же sign , то с выхода блока 7.19 выйдет логический нуль, с выхода блока 7.20 - логическая единица, следовательно, ключ 3 будет закрыт, ключ 4 - открыт и будет принята левополяризованная компонента сигнала.
, то с выхода блока 7.19 выйдет логический нуль, с выхода блока 7.20 - логическая единица, следовательно, ключ 3 будет закрыт, ключ 4 - открыт и будет принята левополяризованная компонента сигнала.
Если sign , то с выхода блока 7.12 выйдет минус единица, следовательно, с выхода блока 7.14 выйдет логическая единица и откроет ключи 7.24, 7.27, с выхода блока 7.13 выйдет логический нуль и закроет ключ 7.17. При этом с выхода блока 7.16 выйдет логическая единица и откроет ключ 7.10, а через элемент НЕ 7.9 закроет ключи 7.8, 7.26. С выхода блока 7.13 логический нуль поступит на третьи входы блоков 5, 6 (фиг.6), подключая их первые выходы. При этом с выхода блока сравнения 7.23 через ключ 7.24 на третий вход блока переключения 12 (фиг.6) поступит либо логический нуль, либо логическая единица. Если sign
, то с выхода блока 7.12 выйдет минус единица, следовательно, с выхода блока 7.14 выйдет логическая единица и откроет ключи 7.24, 7.27, с выхода блока 7.13 выйдет логический нуль и закроет ключ 7.17. При этом с выхода блока 7.16 выйдет логическая единица и откроет ключ 7.10, а через элемент НЕ 7.9 закроет ключи 7.8, 7.26. С выхода блока 7.13 логический нуль поступит на третьи входы блоков 5, 6 (фиг.6), подключая их первые выходы. При этом с выхода блока сравнения 7.23 через ключ 7.24 на третий вход блока переключения 12 (фиг.6) поступит либо логический нуль, либо логическая единица. Если sign , то логическая единица подключит в блоке 12 (фиг.6) второй выход, если sign
, то логическая единица подключит в блоке 12 (фиг.6) второй выход, если sign , то логический нуль подключит первый выход, соединенный с входом фазосдвигающего элемента на π 13 (фиг.6). Одновременно логическая единица с выхода блока 7.16 через ключ 7.27 поступит на вторые входы ключей 3, 4 предлагаемого устройства (фиг.6), открывая их. При этом на первые входы перемножителей 7.3 и 7.4 поступят значения
, то логический нуль подключит первый выход, соединенный с входом фазосдвигающего элемента на π 13 (фиг.6). Одновременно логическая единица с выхода блока 7.16 через ключ 7.27 поступит на вторые входы ключей 3, 4 предлагаемого устройства (фиг.6), открывая их. При этом на первые входы перемножителей 7.3 и 7.4 поступят значения  соответственно. На вторые входы перемножителей 7.3 и 7.4 поступит напряжение U0 и с выходов этих перемножителей 7.3 и 7.4 на вторые входы аттенюаторов 8 и 9 (фиг.6) поступят управляющие напряжения , соответственным образом ориентируя вектор поля опорного сигнала. Параметры опорного сигнала будут установлены и будет осуществляться прием максимальной компоненты эллиптически поляризованного сигнала в линейном поляризационном базисе.
соответственно. На вторые входы перемножителей 7.3 и 7.4 поступит напряжение U0 и с выходов этих перемножителей 7.3 и 7.4 на вторые входы аттенюаторов 8 и 9 (фиг.6) поступят управляющие напряжения , соответственным образом ориентируя вектор поля опорного сигнала. Параметры опорного сигнала будут установлены и будет осуществляться прием максимальной компоненты эллиптически поляризованного сигнала в линейном поляризационном базисе.
Если при следующей оценке ПП полезного сигнала окажется sign , то снова произойдет переход к ортогонально-круговому базису и прием максимальной круговой компоненты полезного сигнала. Далее все описанное выше повторяется. Такие «качели» работают до выключения устройства.
, то снова произойдет переход к ортогонально-круговому базису и прием максимальной круговой компоненты полезного сигнала. Далее все описанное выше повторяется. Такие «качели» работают до выключения устройства.
Блок 7 содержит ключи, логические элементы, линию задержки и блоки хранения (памяти). Выполнение, работа и использование ключей описано выше.
Блоки 7.1. 7.11, 7.15, 7.18, 7.21, 7.22 могут быть выполнены так, как описаны в [19, стр.105-114 - масочные ПЗУ (постоянные запоминающие устройства с вжиганием информации на заводе-изготовителе по желанию заказчика; программируемые ПЗУ - стр.115-138], блок 7.12 - в этой же книге, в частности регистровые ЗУ - на стр.88-94, динамические ОЗУ (оперативные запоминающие устройства) - на стр.98-104.
Примеры выполнения блоков 7.6, 7.13, 7.14, 7.19, 7.20, 7.23 приведены в [12, 13].
Реализация блоков 7.3 и 7.4 может быть такая, как описана в книге [15, стр.340, рис.14, 23(б)]. Блоки 7.7, 7.9, 7.25 - в [20, стр.176-181, рис.8.3(б), 8.6(б)].
Выполнение блока установки начального состояния 22 может быть таким, как показано на фиг.8, где обозначено:
22.1 - ключ;
22.2 - формирователь импульсов (ФИ);
22.3 - бинарный счетчик (БС);
22.4 - логический элемент НЕ.
Блок 22 содержит последовательно соединенные ключ 22.1, ФИ 22.2, БС 22.3 и логический элемент НЕ 22.4, выход которого соединен со вторым входом ключа 22.1 и, одновременно, является вторым выходом блока 22. Вход блока 22 является управляющим входом для импульса запуска, первым выходом блока установки начального состояния 22 и первым входом ключа 22.1.
Работает блок установки начального состояния 22 следующим образом.
В исходном состоянии бинарный счетчик 22.2 обнулен, следовательно, ключ 22.1 открыт, а со второго выхода блока 22 выходит логическая единица, открывает ключ 7.2 (фиг.6). Таким образом блок оперативного хранения в блоке 7 обнулен. При включении блока 22 импульс запуска поступит на первый вход ключа 22.1 и, одновременно, с первого выхода блока 22 поступит на соответствующий вход блока 7, где через линию задержки 7.6, элемент НЕ 7.7, ключ 7.8 и логический элемент НЕ 7.25 закрывает ключи 3,4 (фиг.6) и в блоках 5 и 6 (фиг.6) подключает вторые выходы к первым входам ключей 3, 4. Одновременно импульс запуска через ключ 22.1 поступит на вход ФИ 22.2, с выхода которого выйдет импульс и поступит на вход БС 22.3, изменяя его состояние на противоположное. При этом с выхода логического элемента НЕ 22.4 на ключ 22.1 поступит логический нуль и закроет его. Одновременно этот логический нуль со второго выхода блока 22 поступит на второй вход ключа 7.2 блока 7 и закроет его. Таким образом, блок оперативного хранения 7.12 готов к поступлению значений sign . При выключении блока 22 БС 22.3 обнуляется и устройство готово к следующему сеансу связи.
. При выключении блока 22 БС 22.3 обнуляется и устройство готово к следующему сеансу связи.
Реализация блоков 22.1 и 22.4 приведена выше. Принципиальная схема и работа блока БС 22.3 дана в [20, стр.172, рис.8.1]. Схема и описание работы ФИ 22.2 приведены в [21, стр.157, рис.7.9].
Литература
1. Е.Л.Черенкова, О.В.Чернышев. Распространение радиоволн. М.: Радио и связь, 1984.
2. Уидроу Б. и др. Адаптивные антенные системы. ТИИЭР, 1967, т.55, №12, стр.78-95.
3. Уидроу Б. Адаптивные компенсаторы помех. Принципы построения и применения. ТИИЭР, 1975, т.63, №12, стр.69-99.
4. Уидроу Б., Стирнз С. Адаптивная обработка сигналов/ Пер. с англ. Ю.К.Сальникова. Под ред. В.В.Шахгильдяна. М.: Радио и связь, 1989.
5. А.П.Родимов, В.В.Поповский. Статистическая теория поляризационно-временной обработки сигналов и помех в линиях связи. М.: Радио и связь, 1984, стр.160-162.
6. С.И.Поздняк, В.В.Кузнецов. Оценка поляризационных параметров сигнала на фоне случайно поляризованных помех. Радиотехника и электроника, т.XVIII, №11, 1973.
7. Б.Р.Левин. Теоретические основы статистической радиотехники. Кн.1, М., Сов. Радио, 1974.
8. В.Д.Лукьянчиков, Ю.В.Заплетин. Эффективность квазиадаптивного поляризационного приема сигналов в каналах, влияющих на поляризационную структуру радиоволн. Материалы МНТК «Перспективные технологии в средствах передачи информации ПТСПИ 2003», 1-4 июля 2003 г., г.Владимир: Связь-оценка, стр.45-48.
9. А.c. №398009 (СССР), G 01 V 3/10.
10. Радиотехника, №7, т.32, стр.98-99.
11. A.c. №932428 (СССР), G 01 R 29/10.
12. A.c. №106163 (СССР), Н 04 В 1/10, 1977 г.
13. А.С. №129146 (СССР), Н 04 В 1/10, 1979 г.
14. А.С. №530276, G 01 R 29/10, 1976 г.
15. Б.И.Горшков. Радиоэлектронные устройства. М.: Радио и связь, 1985
16. Пат. США №3735266, Н 01 Р 1/16.
17. Пат. Японии 53-41947, Н 03 Н 7/24.
18. Пат. Японии 53-41948, Н 03 Н 7/24.
19. O.Н.Лебедев. Применение микросхем памяти в электронных устройствах. М.: Радио и связь, 1994.
20. М.Мэндл. 200 избранных схем электроники./ Пер. с англ. под ред. Я.С.Ицхоки. М.: Мир, 1980.
21. М.Тули. Карманный справочник по электронике. Перевод с англ. к.т.н. В.В.Попова, Энергоатомиздат, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ | 2007 |
|
RU2327288C1 |
| СПОСОБ РАДИОСВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ | 2008 |
|
RU2386212C1 |
| СПОСОБ РАДИОСВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ | 2006 |
|
RU2314642C1 |
| Способ обнаружения атаки с ослеплением детекторов в системах квантовой криптографии с поляризационным кодированием | 2021 |
|
RU2783977C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АНТЕННОЙ РЕШЕТКОЙ ИДЕНТИЧНО ОРИЕНТИРОВАННЫХ ВЕКТОРНЫХ ИЗЛУЧАТЕЛЕЙ | 2006 |
|
RU2330356C1 |
| Способ и устройство квантового распределения ключа | 2024 |
|
RU2825566C1 |
| Устройство для приема радиосигналов | 1979 |
|
SU815695A1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2449472C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2000 |
|
RU2171483C1 |
| ПОЛЯРИЗАЦИОННО-ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ПОДВИЖНОГО ОБЪЕКТА И РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2521435C1 |




Изобретение относится к области радиосвязи и может быть использовано в радиоэлектронных системах различного назначения в широком диапазоне частот. Технический результат - уменьшение энергетических потерь приема сигнала, снижение требований к точности оценки ПП, упрощение устройства для осуществления способа. Способ квазиадаптивной поляризационно-временной обработки сигналов заключается в том, что принимаемую выборку отсчетов полезного сигнала перемножают с весовыми коэффициентами опорного сигнала ортогонально-кругового поляризационного базиса, выделяют амплитуды квадратурных составляющих ортогонально-круговых компонент принимаемого сигнала, определяют значения этих амплитуд, производят оценку поляризационных параметров сигнала в ортогонально-круговом поляризационном базисе, по результатам которой переходят для приема в тот или иной поляризационный базис, где перемножают принимаемые отсчеты сигнала либо на постоянные весовые коэффициенты ортогонально-кругового поляризационного базиса, либо на оценочные значения переменных весовых коэффициентов ортогонально-линейного поляризационного базиса, в ортогонально-круговом поляризационном базисе осуществляется прием наибольшей из ортогонально-круговых компонент полезного сигнала, в ортогонально-линейном поляризационном базисе - максимальной компоненты эллиптически поляризованного сигнала. Устройство содержит датчики поляризационно-ортогональных компонент сигнала (1, 2), ключи (3, 4), блоки переключения (5, 6, 12), блок управления (7), управляемые аттенюаторы (8, 9), фазосдвигающий элемент на π (13), блок установки начального состояния (22), сумматоры (14, 15, 21), усилители (17, 18), блоки определения амплитуд (19, 20), блок определения поляризационных параметров (16), фазосдвигающие элементы на  (10, 11). 2 н.п. ф-лы, 8 ил.
(10, 11). 2 н.п. ф-лы, 8 ил.
| Устройство для определения поляризационных параметров электромагнитного поля | 1980 |
|
SU932428A1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ КРОССПОЛЯРИЗОВАННЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2048682C1 |
| Устройство для измерения инвариантов эллиптически поляризованного магнитного поля | 1983 |
|
SU1141884A1 |
| US 3735266, 22.05.1973 | |||
| 1971 |
|
SU416264A1 | |
| US 4544926, 01.10.1985 | |||
| Устройство для защиты смотровыхСТЕКОл B дРОбЕСТРуйНыХ KAMEPAX | 1978 |
|
SU831598A2 |
| Фара | 1978 |
|
SU777341A1 |
| РОДИМОВ А.П., ПОПОВСКИЙ В.В | |||
| Статистическая теория поляризационно-временной обработки сигналов и помех в линиях связи | |||
| Москва, Радио и связь, 1984, с.160-162. | |||

