Изобретение относится к области измерений, а более конкретно к устройствам измерения параметров физических полей преимущественно для контроля сейсмопроцессов.
Известные способы прогнозирования землетрясений [1, 2] включают наблюдения за распространением в горных породах искусственно возбуждаемых взрывами или ударами и вибрационными генераторами упругих волн с помощью сейсмографов [3, 4], с регистрацией упругих колебаний по нескольким каналам, состоящим из группы сейсмонриемников, которые соединены проводами с центральным пунктом регистрации, на котором размещаются усилители, частотные фильтры, регистратор (магнитный или оптический) и пульт управления.
Недостатком известных способов является ограничение географии контролируемых зон, обусловленное местом размещения сейсмографа и его дальностью действия.
Для увеличения охвата контролируемых зон сейсмографы, как правило, устанавливаются на транспортные средства, диапазон перемещения которых зависит от рельефа местности.
Известен также способ регистрации электрического предвестника землетрясения [5], при котором измеряют компоненты напряженности электрического поля питающего диполя постоянного тока приемными диполями, в котором для расширения динамического диапазона измерения питающий и приемные диполи располагают на участке местности, где величина вертикального коэффициента анизотропности "m" удовлетворяет соотношению 1<m<3. При этом питающий диполь располагают таким образом, чтобы его ось была ориентирована под углом 45 градусов к направлению вкрест простирания анизотропных пород, азимутальные приемные диполи располагают по азимутам 90, 30 и -60 градусов относительно оси питающего диполя, а радиальный приемный диполь располагают по азимуту - 120 градусов, осуществляя одновременные регулярные измерения компонент напряженности и по одновременному изменению всех измеряемых величин более чем на 50% или по одновременному изменению их знаков судят о наличии предвестника землетрясения.
При реализации данного способа имеется возможность расширения динамического диапазона путем соответствующего расположения диполей. Однако данный способ применим только на ограниченных участках местности, где величина анизотропности "m" удовлетворяют условию 1<m<3. Удовлетворение этого условия требует проведения дополнительных предварительных работ по выявлению таких зон. Кроме того, данный способ огягощен субъективными ошибками и имеет достоверность прогноза не более 50%.
Известен также способ прогнозирования землетрясений, заключающийся в том, что в контролируемом регионе в разнесенных пунктах измеряют временные вариации горизонтальных компонент вектора геофизического поля, фильтруют их, выделяя вариацию, обусловленную очагом готовящегося землетрясения, диагностируют появление возмущений длительностью 2-10 мин как предвестник землетрясений, по амплитуде предвестника определяют энергетический класс предстоящего землетрясения, по соотношению амплитуд компонент предвестника определяют пеленг на эпицентр предстоящего землетрясения, по пеленгам в различных пунктах определяют место эпицентра, дают временной прогноз землетрясения от 1 часа до 7 дней, в котором для повышения надежности и эффективности прогнозирования измеряют вариации горизонтальных компонент геомагнитного поля, фильтруют низкочастотные вариации с периодом большим 1 часа, в качестве предвестника диагностируют появление серии возмущений в виде синусоидальных колебании с паузами от 1 мин. До 1 часа с меняющимся периодом колебаний, возрастающим от 0,3-0,5 до 3,5-4,0 в середине возмущения и снова уменьшающимся к концу по 0,3-0,5 с [6].
В данном способе измерение временных интервалов вариаций горизонтальных компонент вектора геомагнитного поля повышает надежность прогноза по сравнению со способами [1-4]. Однако данный способ также имеет ограничения по географии контролируемых областей, обусловленные местом расположения измерительных пунктов в контролируемом регионе и отягощен трудоемкими вычислениями по привязке временных интервалов.
Кроме того, для повышения эффективности сейсмических исследовании известными способами для получения достоверного прогноза требуется строгое соблюдение отношения сигнал/помеха и увеличение разрешенности сейсмических записей, что достигается посредством способа, исключающим возбуждение сейсмических колебаний в частотном диапазоне с верхней частотой Fmax1, их приеме линейными группами сейсмоприемников с базой L и расстоянием межу сейсмоприемниками ΔX, регистрацию с помощью сейсмостанции с максимальной частотой тракта записи Fmax2, в котором шаг ΔХ между сейсмоприемниками в группе выбирают из соотношения X*≤V*min1/Fmax2, где V*min1 - минимальная кажущаяся скорость принимаемые сейсмических волн, а базу L выбирают из соотношения

где V*min2 - минимальная кажущаяся скорость полезных волн, а для сохранения статистического эффекта группы верхнюю частоту диапазона возбуждаемых колебаний Fmax и максимальную частоту тракта записи сейсмостанции Fmax1 выбирают из соотношения

где Rсл.ш - радиус коррекции случайных шумов [7].
Данный способ также имеет ограничение географии контролируемых областей и отягощен выполнением условий по строгому соблюдению геометрических величин.
В способе вибросейсмической разведки, основанном на возбуждении вибрационным источником сейсмических колебаний с помощью сигналов развертки, в котором задают максимальную частоту fmax, приеме колебаний и их цифровой регистрации на магнитный носитель со скоростью протяжки, определяемой частотой fкв квантования, в котором для повышения разрешающей способности максимальную частоту сигнала развертки устанавливают из условия fmax≤0,36 fкв [8].
Благодаря исключению строгого соблюдения геометрических величин и исключению ряда условий данный способ повышает надежность прогноза по сравнению со способом [7], но также имеет ограничения географии контролируемых зон, обусловленное местом расположения измерительных пунктов в контролируемом регионе.
Отмеченных недостатков лишен способ прогнозирования землетрясений [9], включающий род разнесенных во времени последовательных серий измерений напряженности электромагнитного поля, в котором производятся одновременные измерения магнитной и электрической компонент поля низкочастотных излучений околоземной плазмы в движении на высотах верхней ионосферы, затем исключается из рассмотрения область внутренней границы внешнего радиационною пояса и примыкающей к нему части зазора между радиационными поясами, также искусственные излучения, а о существовании сейсмоопасных источников судят по наличию зон устойчивого наблюдения индуцированных излучений ионосферной плазмы, превышающих не менее чем на 15-20 дБ уровень фона естественных излучений, обычно наблюдаемых в данной области пространства.
Точность данного способа и его помехоустойчивость отягощены необходимостью исключения из результатов измерений влияния потоков заряженных частиц, вторгающихся в околоземное пространство, обусловленного выбросами активных областей солнца, а также необходимостью привязки временных интервалов измерений.
Известны также способы прогнозирования землетрясения по электромагнитному излучению [10-11]. В способе [10] измеряют параметры электромагнитною поля, определяют время наступления землетрясения по аномальному изменению и скорость изменения измеряемого прогнозирующего параметра, для чего производят излучение и прием электромагнитной волны, проходящей через район предполагаемого землетрясения, а в качестве прогнозирующею параметра используют разность частот и фаз излученного и принятого сигнала.
В отличие от способа [10] в способе [11], включающем излучение электромагнитных монохроматических СВЧ-колебаний, осуществляют прием прошедшего через исследуемый район электромагнитного излучения, измеряют его параметры, по которым судят о времени наступления землетрясения, в котором для повышения точности производят излучение монохроматического СВЧ-колебания, модулированного импульсами прямоугольной формы в виде последовательности радиоимпульсов заданной длительности, измеряют длительность принятого радиоимпульса и по разности длительности излученного и принятого радиоимпульсов судят о времени наступления землетрясения.
Использование электромагнитного излучения позволяет повысить точность измеряемых параметров, по которым прогнозируют время наступления землетрясения. Однако помехоустойчивость во многом определяется расстоянием от эпицентра до базовой точки и рельефом местности.
Известны также способы прогнозирования землетрясения по измерению мощности низкочастотных флуктуации вертикальной и горизонтальной составляющих напряженности электростатического поля Земли [12-16] или по измерению мощности инфранизкочастотной составляющей тока в земной коре [17] с последующей их обработкой путем сравнения отношений мощности флуктуаций горизонтальной составляющей электрического поля Земли к мощности флуктуации вертикальной составляющей в эпицентре землетрясения и в базовой точке, или путем вычисления радиуса взаимной корреляции, по которым судят об интенсивности в предполагаемом эпиентре землетрясения.
Данные способы отягощены сложностью обработки низкочастотных (5-600 Гц) осцилляции длительностью 100 мс и менее, которые должны быть выделены на фоне высокочастотных тональных компонент в частотном диапазоне 1,5-5 кГц, что требует набора существенных по объему массивов статистических данных и их обработки для получения необходимой степени достоверности прогноза.
Известен также способ долгосрочного прогноза землетрясений сетью сейсмических станций в сейсмоактивной зоне, определение их энергетических и пространственно-временных параметров в направленности развития сейсмического процесса, в котором для повышения надежности и точности долгосрочного прогноза регистрацию осуществляют по крайней мере четырьмя сейсмическими станциями, равномерно располагаемыми вдоль соседних контрольных зон, в которых определяют направленность развития сейсмического процесса, выявляют миграцию локальных областей сейсмической активизации и по изменению скорости и направления миграции этих областей судят о местоположении и величине готовящегося крупного землетрясения в сейсмоактивной зоне [18].
В данном способе определение направленности развития сейсмическою процесса с обработкой сигналов, полученных по четырем станциям, способствует повышению достоверности прогноза. Однако точность и достоверность данного способа отягощены возмущениями обусловленных рефракцией и дифракцией сигналов, обусловленных рельефом местности и промышленными помехами.
Дня повышения надежности и достоверности получения исходных данных сейсмоизмерительное устройство снабжают, по меньшей мере, двумя сейсмодатчиками, связанными с блоком обработки данных посредством линии передачи измерительных сигналов. При этом все сейсмодатчики связаны одной и той же линией передачи измерительных сигналов, для чего сейсмодатчики выполняют в виде волоконных интерферометров, в качестве системы тракта которой используют участки волоконного светодиода, распределенного по его длине [19].
В известном способе и устройстве для его осуществления [20] для измерения параметров физического поля в прибрежной зоне на глубине более 100 м размещают группу устройств регистрации, соединяют их трактом связи с наземными станциями приема и обработки сигналов для повышения надежности прогноза, в частности определения возникновения волны цунами, прогноз определяют поэтапно путем установки дополнительной группы устройств регистрации на расстоянии 2-4 тыс. км от берега, а группу устройств в прибрежной зоне размещают на расстоянии l от берега, определяемом по формуле  где τкр - нормированное время на защиту охраняемого района, g - ускорение свободного падения, Н - средняя глубина моря между берегом и устройством, и выполняют в виде модели шельфа у береговой линии охраняемого района, при этом устройства закреплены на дне моря тросами-растяжками, наклоненными под ∠30-60° к горизонту и соединенными с корпусом устройства, по крайней мере, в трех равноудаленных друг от друга точках, по сигналам дальних устройств регистрации устанавливают факт возникновения и направления распространения волн цунами, а по сигналам ближних устройств регистрации определяют степень опасности волны цунами для охраняемою района. Устройство для осуществления данною способа включает корпус с крышкой и днищем, подводной кабель связи с наземной станцией, в котором крышка выполнена куполообразной, а днище - в виде усеченного конуса, входящего меньшим основанием под куполообразную крышку и соединенною с ребрами жесткости, при этом последние разделяют внутренний объем устройства по крайней мере на четыре сектора, а большее основание конуса образует с крышкой кольцевую прорезь, в которой в каждом из секторов установлены анемометры; а верхняя часть секторов и сбросной шахты под куполообразной крышкой заполнены газообразным агентом (аргентом).
где τкр - нормированное время на защиту охраняемого района, g - ускорение свободного падения, Н - средняя глубина моря между берегом и устройством, и выполняют в виде модели шельфа у береговой линии охраняемого района, при этом устройства закреплены на дне моря тросами-растяжками, наклоненными под ∠30-60° к горизонту и соединенными с корпусом устройства, по крайней мере, в трех равноудаленных друг от друга точках, по сигналам дальних устройств регистрации устанавливают факт возникновения и направления распространения волн цунами, а по сигналам ближних устройств регистрации определяют степень опасности волны цунами для охраняемою района. Устройство для осуществления данною способа включает корпус с крышкой и днищем, подводной кабель связи с наземной станцией, в котором крышка выполнена куполообразной, а днище - в виде усеченного конуса, входящего меньшим основанием под куполообразную крышку и соединенною с ребрами жесткости, при этом последние разделяют внутренний объем устройства по крайней мере на четыре сектора, а большее основание конуса образует с крышкой кольцевую прорезь, в которой в каждом из секторов установлены анемометры; а верхняя часть секторов и сбросной шахты под куполообразной крышкой заполнены газообразным агентом (аргентом).
Недостатком способа является то, что для его реализации необходимо группу устройств регистрации, размещенную на расстоянии 2-4 тыс. км от берега, соединять трактом связи с наземными станциями приема в виде кабеля, что снижает достоверность прогноза, так как при передаче исходных сигналов по кабелю точность измерений, полученная непосредственно в точке замеров, будет на 30% ниже при приеме наземной станцией, кроме того, техническая реализация данного способа отягощена существенными материально-трудовыми затратами. Данный способ также имеет ограничения, так как его реализация требует жесткой привязки к конкретному району измерений, и получение сигналов возможно с ограниченной площади.
Более широкое измерение параметров физических полей обеспечивает способ измерения параметров физических полей, включающий пропускание через контролируемую зону зондирующих сигналов, которые затем подвергаются обработке, включающей томографическое восстановление распределения параметров физического поля в пределах контролируемой зоны, в котором зондирующие сигналы пропускают через измерительные каналы, которые предварительно формируют в контролируемой зоне, при этом в качестве измерительных каналов используются волоконные светодиоды, а в качестве зондирующих сигналов используется когерентное световое излучение. При этом из светодиодов формируют основную и дополнительную измерительные сети, для чего светодиоды основной измерительной сети размещают по меньшей мере по двум направлениям предпочтительно таким образом, чтобы каждый световод одного направления пересекал все световоды другого направления и при этом фиксируются изменения параметров светового излучения, одновременно пропускаемого по всем светодиодам основной и дополнительной сетей [21]. Однако реализация данного способа имеет ограничения, связанные с изменчивостью параметров среды пропускания зондирующих сигналов, что при неблагоприятных внешних условиях может привести к недопустимым погрешностям измерения.
Задачей заявляемого технического предложения является расширение области контролируемой зоны и повышение достоверности вероятностного прогноза.
Поставленная задача решается за счет того, что в способе измерения параметров физических полей, включающем размещение в контролируемых зонах, включая морское дно, групп устройств регистрации, соединенных трактом связи с диспетчерской станцией приема и обработки сигналов, томографическое восстановление распределения параметров физического поля в пределах контролируемой зоны, поэтапное определение прогноза, с закреплением устройств регистрации на дне моря, в котором устройства регистрации, образующие каждую группу, установлены на расстояниях друг от друга, соизмеримых с глубиной установки устройств регистрации, а группы устройств регистрации размещены с образованием веерной зоны в азимутальном направлении и соединены с морской диспетчерской станцией приема и обработки сигналов гидроакустическим трактом связи, устройства на дне моря закреплены посредством якоря-груза, при этом устройство регистрации включает корпус с днищем и ребрами жесткости, разделяющими внутренний объем на сектора и предназначенными для крепления датчиков измерения параметров полей, корпус выполнен сферической формы и состоит из двух полусфер, сочлененных элементами крепления, в месте сочленения снабженный герметическим резиновым поясом, а днище сопряжено с якорь-грузом, закрепленным стропами, механически связанными с размыкателем, в верхней и нижней частях корпуса выполнены отверстия, в верхнем отверстии установлены гидроакустическая антенна, гидрофон, размыкатель якоря-груза, а в нижнем отверстии установлен проблесковый светодиод, гидроакустическая антенна и гидрофон соединены с информационно-измерительным модулем через устройство ввода-вывода сигналов, которое соединено с информационно-измерительным модулем, расположенным в корпусе и состоящим из блока регистрации, блока ориентации, блока сейсмодатчиков, установленных на карданном подвесе, блока фильтров геофонов.
Размещение устройств регистрации, образующих каждую группу на расстоянии друг от друга, соизмеримом с глубиной установки устройств, позволяет обеспечить надежную передачу и прием сигналов по гидроакустическому тракту связи с диспетчерской станцией, что обеспечивает двухстороннюю связь с возможностью посылки при необходимости корректирующих сигналов на устройства регистрации. В сочетании с образованием веерной зоны в азимутальном направлении существенно расширяет границы контролируемой зоны и, как следствие, расширяет диапазон измерения параметров физических полей.
Закрепление устройства регистрации на дне моря посредством якоря-груза исключает необходимость выполнения подводно-водолазных работ по установке и снятию устройств регистрации, а наличие размыкателя позволяет отцепить якорь-груз по сигналу диспетчерской станции, что обеспечивает всплытие устройства регистрации на поверхность моря и измерение параметров физического поля еще на нескольких уровнях.
Выполнение информационно-измерительного модуля, соединенного с гидроакустической антенной, состоящим из блока регистрации, блока ориентации, блока сейсмодатчиков, установленных на карданном подвесе, блока фильтров геофонов и соединенным с гидрофоном, обеспечивает измерение более широкого спектра сигналов физического поля, что существенно повышает достоверность прогноза.
Совокупность новых признаков из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Сущность заявляемого технического решения поясняется чертежами.
Фиг.1. Расположение регистрирующих устройств в контролируемой зоне на акватории моря. Регистрирующие устройства 1 закреплены на дне 2 моря посредством якорь-груза 16, диспетчерские станции приема и обработки сигналов 3, 4, 5 установлены соответственно на море, суше и на орбите. Устройства регистрации 1 соединены с диспетчерскими станциями приема и обработки сигналов 3 гидроакустическим трактом связи 6.
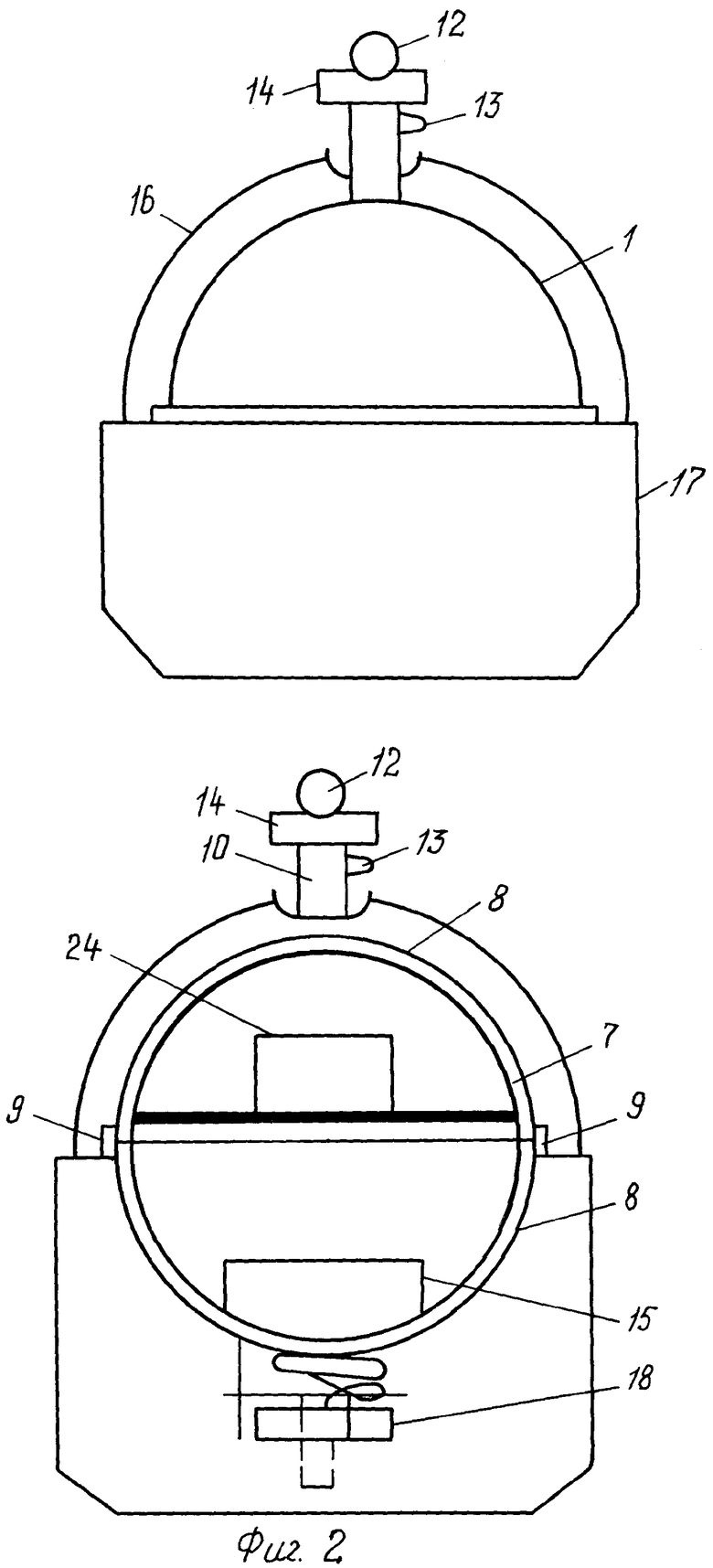
Фиг.2. Регистрирующие устройство 1 включает сферический корпус 7, состоящий из двух полусфер 8, сочлененных элементами крепления 9, снабженного верхним и нижним отверстиями 10, 11 соответственно, в которых установлены гидроакустическая антенна 12, гидрофон 13, размыкатель 14, проблесковый светодиод 15. Днище корпуса 7 сочленено с якорь-грузом 16, представляющим собой бетонный балласт 17, соединенный с размыкателем 14. В полости бетонного балласта 17 располагается поплавок 18, снабженный фалом.
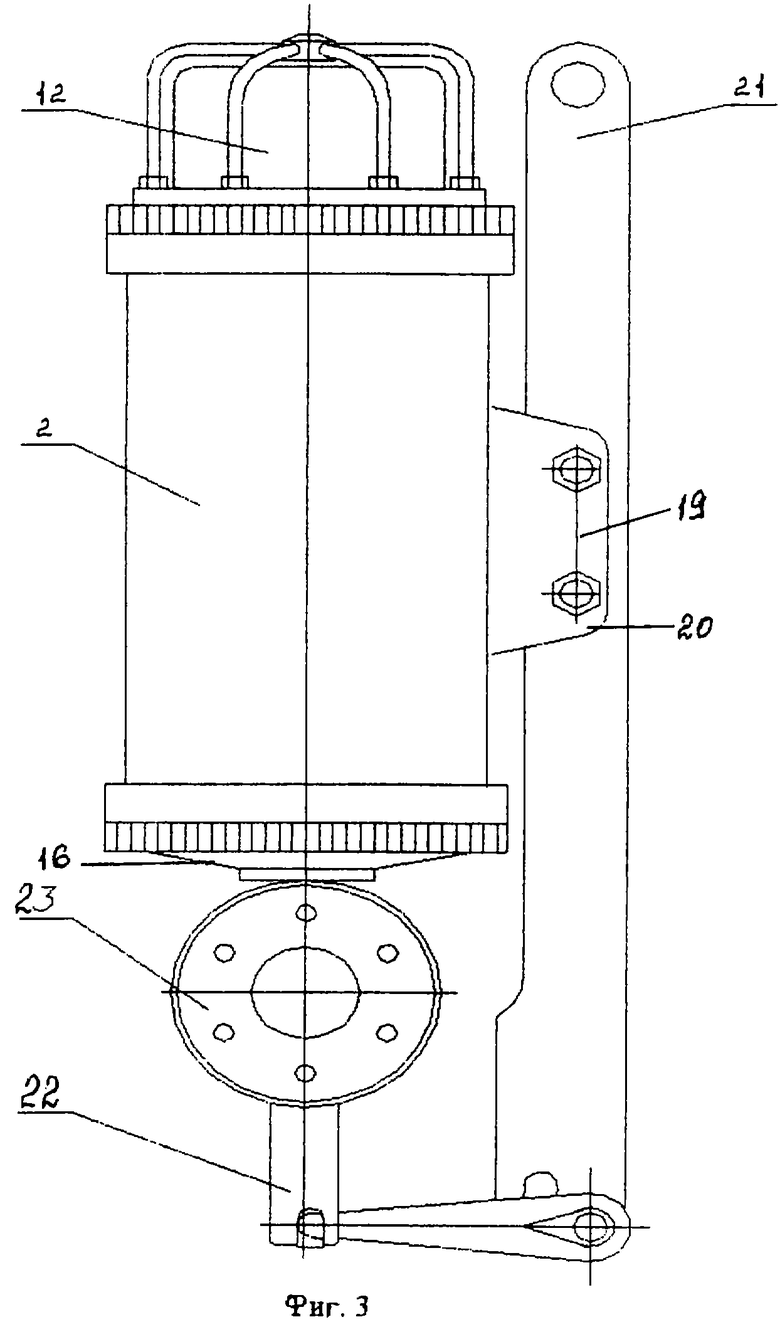
Фиг.3. Общий вид размыкателя 14, который включает электрод 19, выполненный из проволоки и закрепленный на скобе 20, сочлененной с корпусом 7 и соединенной с силовой планкой 21, которая через рычажный механизм 22 соединена с исполнительным механизмом 23, сочлененным с якорь-грузом 16.
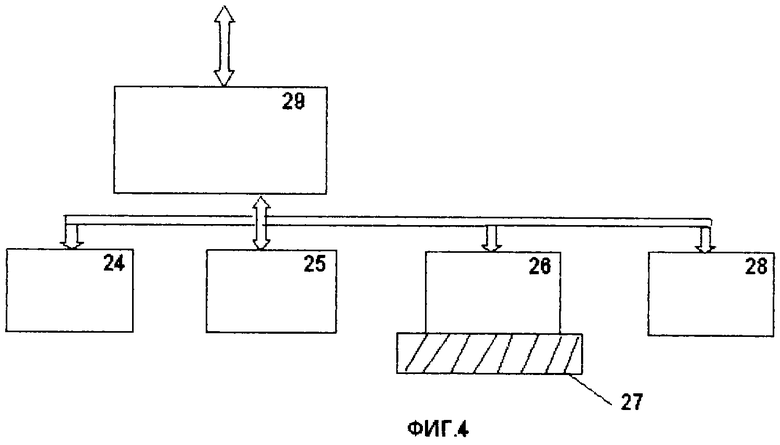
Фиг.4. Блок-схема информационно-измерительного модуля 17 включает блок регистрации 24; блок ориентации 25, блок сейсмодатчиков 26, установленных на карданном подвесе 27, блок фильтров геофонов 28, устройство ввода-вывода сигналов 29.
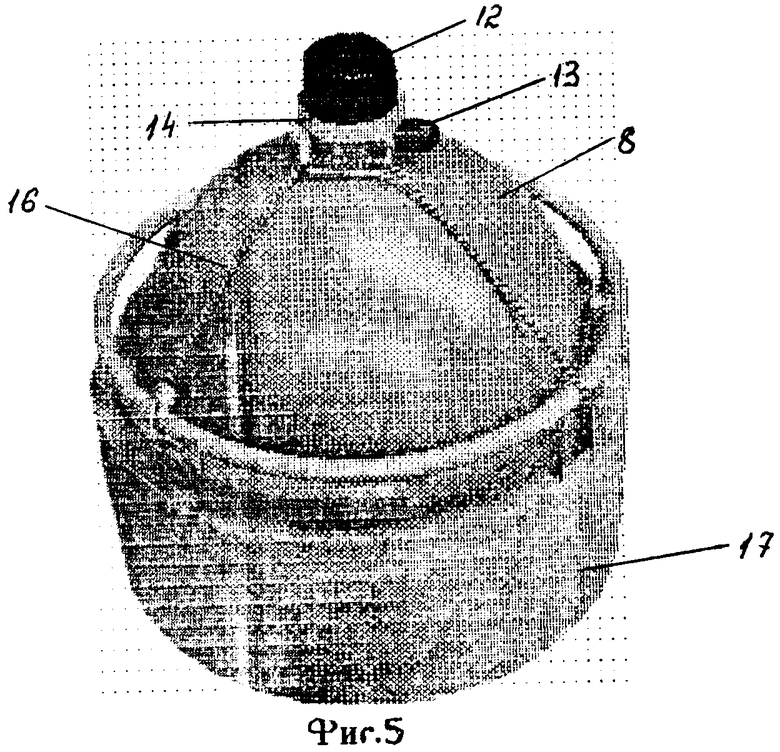
Фиг.5. Общий вид регистрирующего устройства 1, корпус 7 которого состоит из двух полусфер 8, сочлененных элементами крепления. По окружности плоскости сочленения полусфер 8 установлен герметический резиновый пояс 30. Днище корпуса 7 сочленено с бетонным балластом 17 через размыкатель 14.
Блоки информационно-измерительного модуля 17 закреплены на ребрах жесткости корпуса 7 и представляют собой шасси.
Корпус 7 изготовлен из высокопрочного алюминиевого сплава и представляет собой две полусферы 8, соединенные болтами 9. Для герметизации места сочленении полусфер 8 установлен герметический резиновый пояс 30.
Для установки внешних устройств в полюсах корпуса 7, выполненного в виде сферы, имеются два отверстия 10 и 11, В верхнем отверстии 10 установлены гидроакустическая антенна 12. гидрофон 13 и размыкатель 14. В нижнем отверстии 11 расположен проблесковый светодиод 15 повышенной яркости для поиска устройства репарации 1 при всплытии в ночное время. Перед постановкой корпус 7 прикрепляется к бетонному грузу 17 через размыкатель 14, обеспечивающий отсоединение груза 17 по команде с диспетчерской станции 3. В полости груза 17 располагается поплавок 18 с фалом.
Для обеспечения всплытия устройства регистрации 1 с диспетчерской станции 3 подается гидроакустический сигнал на срабатывание размыкателя 14. Сигнал передается на дно посредством судовой гидроакустической антенны и принимается гидроакустической антенной 12. В ответ выдается сигнал, подтверждающий, что команда всплытия принята к исполнению. Выполнение команды осуществляется путем подачи электрического напряжения на электрод 19 размыкателя 14. В результате электрохимического процесса проволока растворяется в морской воде за 1-2 минуты, срабатывает механизм отстыковки груза от корпуса 7, и устройство регистрации 1, имеющее положительную плавучесть, начинает подъем со скоростью 1-2 м/с. При этом устройство регистрации 1 переворачивается так, что проблесковый светодиод 15 оказывается наверху, а гидроакустическая антенна 12 при ее всплытии на поверхности погружена в воду, что дает возможность связи с ней по гидроакустическому каналу при ее поиске на поверхности моря. При этом рядом с устройством регистрации 1 на поверхности плавает поплавок 18 с фалом, посредством которого регистрирующее устройство 1 подводится к борту диспетчерской станции 3 и затем поднимается на борт.
Блок регистрации 24 представляет собой пластмассовый корпус, на котором расположено устройство ввода-вывода сигналов 30, а внутри корпуса находятся разъемы для подключения внешних устройств, установленных на диспетчерской станции 3, и источник питания.
Блок ориентации 25 предназначен для определения ориентации устройства регистрации 1 относительно горизонтальной плоскости, а также стран света по отношению к магнитному полю Земли. Блок 25 позволяет измерять и регистрировать наклоны как корпуса регистрирующего устройства 1 в целом, так и блока сейсмодатчиков 26, размещенных в подторможенном карданном подвесе 27 в ходе погружения, работы и всплытия устройства регистрации 1.
Блок ориентации 25 состоит из двух датчиков наклона, представляющих собой двухосевые акселерометры типа ADXL202 и магнитного двухкомпонентного компаса типа VECTOR V2X. Емкость архива блока 25 составляет 64 000 записей.
Конструктивно блок 25 состоит из основной платы и выносного датчика уклона, который располагается на корпусе блока сейсмодатчиков 26, размещенного в двухосевом карданном подвесе 27, и снабжен кабелем и разъемом для подключения к блоку регистрации 24, основная плата которого, помимо датчиков магнитного ноля и уклонов, снабжена контроллером типа AVR8515, часами реального времени типа PCF 8583, энергонезависимой памятью типа АТ45D081 объемом 1 Мбайт (64 000 записей, содержащих время, уклоны и компоненты магнитного поля), тумблером, кнопкой, светодиодом и определенным набором дискретных электронных элементов. Плата снабжена еще разъемом для подключения выносного датчика уклонов, а также кабелем с разъемом для подсоединения к СОМ-порту компьютера через блок регистрации 24. Блок регистрации 24 имеет два основных режима работы, определяемых положением тумблера. Первый режим - диалог с оператором. В этом режиме контролируется состояние устройства регистрации 1 и выполняется его калибровка и настройка. Диалог осуществляется с помощью компьютера, оснащенного специальной программой и связанного с блоком через COM-порт. Диалог с оператором заканчивается либо выходом из программы, при этом сам блок продолжает ожидать команды, либо путем перевода блока в режим регистрации посредством переключения тумблера. Переход в режим регистрации производится после переключения тумблера автоматически через несколько секунд.
В режиме регистрации блок устанавливает будильник часов в соответствии с действующим значением интервала опроса датчиков и переходит в состояние пониженного энергопотребления. В момент достижения часами времени установки будильника возникает сигнал пробуждения, который через синхронизатор вызывает переход контроллера в активное состояние. Контроллер производит опрос датчиков, заносит результат в память совместно со временем начала измерения. Данный процесс повторяется циклически. Выход из цикла регистрации производится переключением тумблера. Регистрация сейсмосигналов осуществляется по четырем каналам - три для сейсмических датчиков (геофонов) и один для гидрофона 13. Кроме того, имеется служебный канал для записи времени регистрации, угла наклона и азимута с заданной периодичностью. Диапазон регистрируемых частот от 5 до 125 Гц. Чувствительность геофонов па частоте 10 Гц не менее 2000 V/m/s. Чувствительность гидрофона не менее 25 mkV/Pa. Динамический диапазон сейсмоканала не менее 105 дБ. Погрешность измерения магнитного склонения не более 2-х градусов.
Блок сейсмоприемников 26 установлен в карданном подвесе 27 и состоит из кассеты в которой вставлены три геофона, работающие соответственно по осям X, Y, Z. Карданный подвес 27 блока сейсмоприемников 26 служит для того, чтобы гарантировать правильную работу датчиков в случаях, когда устройство регистрации 1 окажется стоящим на дне с наклоном, превышающим допустимый наклон сейсмодатчиков. Максимально отрабатываемый угол наклона карданного подвеса составляет 45 градусов. В блоке 26 применены сейсмодатчики типа GS-20DX.
Блок фильтров геофонов 28 расположен в нижней части шасси и представляет собой электронную плату, на которой расположены три идентичных капала полосовых фильтров третьего порядка с полосой пропускания 3-125 Гц.
Диспетчерская станция 3 обеспечивает выполнение функций и операций, необходимых для постановки погружаемых устройств регистрации 1 на морское дно, их возврата, считывания зарегистрированных сигналов физического поля, томографического восстановления распределения параметров физического поля в пределах контролируемых зон и оперативною контроля за работой устройств регистрации 1. В состав диспетчерской станции 3 входят следующие блоки и устройства. Судовой блок для сопряжения с процессором блока 25. Приемник спутниковых сигналов с диспетчерских станций 4, 5. Персональный компьютер типа Pentium-3. Гидроакустическая система навигации и управления размыкателем. Судовая гидроакустическая антенна. Механические устройства сброса и подъема регистрирующего устройства 1.
Размыкатель 14 представляет собой гидроакустический размыкатель и предназначен для эвакуации устройства регистрации 1 со дна моря. Эвакуация осуществляется путем сброса якоря-груза 17 по команде, переданной с диспетчерской станции 3 по гидроакустическому каналу связи или по сигналу таймера. Прием и исполнение команды подтверждается ответным сигналом (квитанцией) регистрируемым диспетчерской станцией.
Кроме того, посредством устройства 14 обеспечивает измерение наклонной дальности от диспетчерской станции 3 до устройства регистрации 1, что позволяет определять координаты местоположения устройства регистрации 1.
При поступлении команды на размыкание от диспетчерской станции 3 на устройство регистрации с выбранным номером последний посылает сигнал подтверждения приема команды и отсоединяет груз. Время размыкания зависит от солености, температуры и толщины проволоки и может достигать 40 мин.
В режиме ожидания потребления тока от источника питания составляет не более 500 маА.
Отсоединении груза 17 может происходить также при достижении внутренним таймером размыкателя 14 установленною времени, если таймер был предварительно установлен.
Гидроакустическая антенна 12 конструктивно представляет собой цилиндрический корпус, изготовленный из нержавеющей стали. Внутри корпуса помещаются платы приемопередатчика гидроакустических сигналов.
Чувствительный элемент антенны выполнен на базе пьезокерамического кольца из цирконата-титаната свинца.
Реализация заявляемого способа технической сложности не представляет, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применяемость".
Источники информации
1. Авторское свидетельство СССР №1444688.
2. Авторское свидетельство СССР №1444689.
3. Авторское свидетельство СССР №1300093.
4. Авторское свидетельство СССР №1469481.
5. Авторское свидетельство СССР №1300391.
6. Авторское свидетельство СССР №1721563.
7. Авторское свидетельство СССР №1712920.
8. Авторское свидетельство СССР №1712919.
9. Авторское свидетельство СССР №1171737.
10. Авторское свидетельство СССР №1376766.
11. Авторское свидетельство СССР №1454103.
12. Авторское свидетельство СССР №1290889.
13. Авторское свидетельство СССР №1182462.
14. Авторское свидетельство СССР №1331284.
15. Авторское свидетельство СССР №1347741.
16. Авторское свидетельство СССР №1347742.
17. Авторское свидетельство СССР №1349535.
18. Авторское свидетельство СССР №1628026.
19. Патент РФ №2066467.
20. Патент РФ №2066468.
21. Патент РФ №2066466.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2007 |
|
RU2348950C1 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2005 |
|
RU2294000C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2433428C2 |
| АВТОНОМНАЯ ДОННАЯ ШИРОКОПОЛОСНАЯ СЕЙСМОСТАНЦИЯ | 2014 |
|
RU2572047C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
Изобретение относится к геофизике и может быть использовано для контроля сейсмопроцессов. Заявлен способ регистрации сейсмосигналов на акватории моря, включающий размещение на морском дне групп сейсмодатчиков, соединенных трактом связи с диспетчерской станцией приема и обработки сигналов и закрепленных на дне моря. Дополнительно для регистрации сейсмосигналов используется гидрофон. Определение ориентации сейсмодатчиков и гидрофона определяется посредством использования блока ориентации. Группы сейсмодатчиков, закрепленных на дне моря посредством якоря-груза, размещены с образованием веерной зоны в азимутальном направлении и соединены с морской диспетчерской станцией приема и обработки сигналов гидроакустическим трактом связи. Также заявлено устройство для регистрации сейсмосигналов на акватории моря, включающее корпус с днищем и ребрами жесткости, внутренний объем которого разделен на сектора с расположенными в них сейсмодатчиками. Устройство также содержит стропы, механически связанные с размыкателем, включающим электрод. В верхней и нижней частях корпуса выполнены отверстия. В верхнем отверстии установлены гидроакустическая антенна, гидрофон, размыкатель, а в нижнем - проблесковый светодиод, гидроакустическая антенна и гидрофон, соединенные через устройство ввода-вывода сигналов с информационно-измерительньм модулем, расположенным в корпусе и состоящим из блока регистрации, блока ориентации, включающего датчики магнитного поля, наклона и азимута, блока сейсмодатчиков, установленных на карданном подвесе, блока фильтров сейсмодатчиков. Технический результат: расширение области контролируемой зоны. 2 н.п. ф-лы, 5 ил.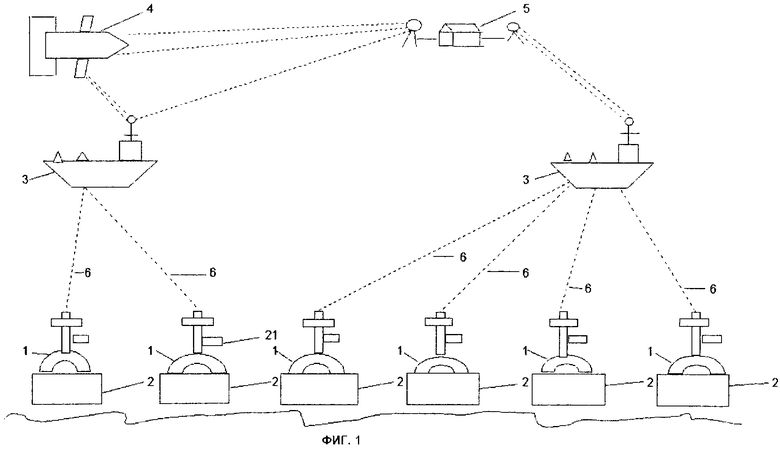
| RU 2066466 С1, 10.09.1996 | |||
| RU 2066468 С1, 10.12.1996 | |||
| RU 2066467 C1, 10.09.1996 | |||
| ЭЛЕКТРОМАГНИТ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2183038C1 |

