Изобретение относится к способам проведения морских сейсморазведочных работ с использованием технических средств получения исходной информации и может быть использовано для исследования осадочных разрезов на акваториях морей и океанов для выявления морских углеводородных месторождений.
Известен способ морской сейсмической разведки, включающий возбуждение упругих колебаний и регистрацию многоканальным приемным устройством отраженных волн вдоль профиля, а также разноглубинное накопление информации при фиксированной средней точке, в котором перемещение источника возбуждения упругих колебаний и многоканального приемного устройства производится по профилю прямым и обратным курсом судна с последовательным изменением расстояния между источником и приемным устройством при смене курса, при этом перед началом движения судна приемное устройство фиксируют в вертикальном положении в толще воды и в процессе движения непрерывно выставляют в воду бесприборные секции со скоростью, равной скорости движения судна, а при смене курса судна пикет местоположения приемного устройства смещают по отношению к первоначальному положению на величину ΔXn, определяемую по выражению
 ,
,
где N - кратность накапливания информации по общей серединной точке, Xn - взрывной интервал, n - количество пунктов взрыва для одной фиксированной стоянки приемного устройства, при этом обрабатывают серию параллельных профилей с расстоянием между профилями, выбираемыми из условия реализации пространственной апертуры [1], что обеспечивает достижение технического результата, а именно повышение разрешения и помехоустойчивости сейсмических данных за счет работы премного устройства в стационарных условиях.
Однако техническая реализация способа весьма трудоемкая, что обусловлено необходимостью в процессе движения судна непрерывно выставлять в воду бесприборные секции со скоростью, равной скорости судна, а при смене курса судна пикет местоположения приемного устройства необходимо смещать по отношению к первоначальному положению на величину ΔXn, что требует использования дополнительного оборудования высокой точности для определения координат местоположения бесприборных секций и приемного устройства.
Кроме того, способ может быть реализован только при благоприятных погодных условиях, в противном случае разрешающая способность и достоверность получения исходной информации будет низкой.
Известен также способ морской сейсмической разведки [2], включающий возбуждение колебаний источником и регистрацию отраженных волн многоканальным приемным устройством, установленным с углом наклона Ψ, перемещение по профилю источника и многоканального приемного устройства с помощью судна прямым и обратным курсом с последовательным изменением расстояния между источником и приемным устройством при смене курса, обработку информации, в котором перемещение источника осуществляется с помощью дополнительного судна с фиксированным расстоянием от основного и с той же скоростью движения, а угол наклона многоканального приемного устройства определяют для каждого курса судна относительно вертикали из формулы
 ,
,
где L - расстояние между судами, Н - глубина от поверхности моря до объекта, а на конце приемного устройства закрепляют кондепт и в процессе движения поддерживают его на глубине, которая определяется из выражения
 ,
,
где l - длина приемного устройства, Ψ - угол между приемным устройством и вертикалью, при обработке информации двойное суммирование при прямом и обратном курсах осуществляется по фиксированной общей глубиной точке. Благодаря тому что в данном способе используют два судна, обеспечивается пространственная сейсмическая разведка в отличие от известного способа [1], посредством которого реализуется двухмерная сейсморазведка.
Однако, как и в известном способе [1], реализация данного способа сопряжена с необходимостью определения местоположения и ориентации приемного устройства с использованием дополнительных технических средств с последующей их привязкой к единой системе координат, что при нарушении стационарных условий эксплуатации, особенно при воздействии внешних факторов, является проблематичной задачей и в конечном итоге негативно отражается на надежности и достоверности при обработке исходной информации.
Известны также способ морской поляризационной сейсмической разведки и устройство для его осуществления [3]. Способ включает возбуждение источником продольных упругих волн, прием и регистрацию продольных и обменных волн группами сейсмоприемников по методике многократных перекрытий или одинаковых зондирований, в котором излучение продольных волн и прием продольных и обменных волн осуществляют в моменты укладки приемных устройств на морское дно при непрерывном движении буксирующего сейсмоприемники судна, при этом время разрешенного приема фиксируют по пороговому уровню шума приемников, расположенных в сейсмокосах, а прием и регистрацию упругих волн различных типов осуществляют соответствующими группами сейсмоприемников гидрофонного и геофонного типов, размещенных в одном комбинированном или нескольких специализированных приемных устройствах.
Данный способ реализуется посредством устройства, содержащего последовательно соединенные приемные устройства, многоканальный усилитель, коммутатор, регистратор, блок воспроизведения, а также устройство управления и последовательно соединенные устройства подачи команд на возбуждение и источник упругих волн, причем выходы устройства управления соединены с управляющими входами коммутатора, регистратора и блока воспроизведения, которое дополнительно содержит пороговое устройство и схему запуска управляющего устройства, причем вход порогового устройства соединен с выходом многоканального усилителя, выход порогового устройства соединен с входом схемы запуска управляющего устройства и с входом устройства подачи команд на возбуждение, а выход схемы запуска соединен с управляющим входом устройства управления, а приемные устройства выполнены в виде шланговых комбинированных или кабельно-модульных приемных устройств гидрофонного и геофонного типов, каждое из которых предназначено для регистрации всех типов упругих волн или специализировано на приеме одной компоненты волнового поля с заданной поляризацией.
Данный способ и устройство для его реализации обеспечивают возможность выполнения поляризационной сейсморазведки за счет использования средства регистрации продольных и обменных волн группами сейсмоприемников морской сейсмической косы в моменты укладки сейсмокосы на морское дно.
Однако при этом используется достаточно сложный и не всегда достаточно надежный старт-стопный режим укладывания сейсмокосы на дно при непрерывном замедленном движении судна.
Кроме того, данный способ отягощен негативным влиянием под воздействием внешних факторов, нарушающих стационарные условия получения исходной информации, что влечет за собой невыполнение требований по обеспечению информативности и избыточности измерений, а также увеличение погрешности при определении местоположения сейсмоприемников и их ориентации, что отрицательно сказывается на надежности и достоверности получения и обработке исходных данных.
Выявленных недостатков лишен способ морской многоволновой многокомпонентной сейсморазведки, реализованный посредством системы "ЛАРГЕ" [4], включающей средство генерирования в толще воды продольных упругих волн, выполненное в виде буксируемого за судном источника, средства регистрации отраженных волн, выполненные в виде группы донных приемных устройств, блок обработки и интерпретации данных для выявления морских углеводородных месторождений, в которой средства синхронной регистрации полного волнового поля включают донные приемные устройства и многоканальную приемную установку, буксируемую в водной толще за судном, причем в качестве донных приемных устройств использованы установленные в заданном районе акватории автономные донные сейсмические станции, в качестве многоканальной приемной установки использованы две буксируемые сейсмокосы, одна из которых предназначена для ближней зоны с постоянным выносом от источника, а вторая - для дальней зоны с выносом R, определяемым расстоянием выхода в первые вступления рефрагированных и головных волн от целевых горизонтов в соответствии с выражением 2H<R≤3H, где Н - глубина заданного целевого горизонта, в блоке обработки, выполненном в виде процессора, при обработке данных продольных волн, принятых многоканальной приемной установкой, дополнительно используются скоростные параметры разреза, получаемые при обработке компонентных данных продольных и поперечных волн, синхронно зарегистрированных автономными донными сейсмическими станциями, а для интерпретации данных и построения моделей исследуемых объектов используются кинематические и динамические характеристики всей совокупности отраженных, рефрагированных, головных продольных и поперечных волн, синхронно зарегистрированных автономными донными сейсмическими станциями и многоканальной приемной установкой.
При этом средство генерирования в толще воды упругих волн выполнено в виде мощного широкополосного (3-125 Гц) импульсного источника или источника сложных сигналов, обеспечивающих распространение возбужденных сейсмических волн на расстояние не менее максимального выноса Rmax автономных донных сейсмических станций от источника; автономные донные сейсмические станции размещены вдоль линии заданного профиля при двумерной разведке или по заданной площади морского дна при пространственной сейсмосъемке с удалением станций друг от друга на расстояние не больше выноса R сейсмокосы дальней зоны, при этом максимальный вынос Rmax источника от станций установлен по значению требуемой глубины Hmax исследований из соотношения Rmax≥3Hmax; регистрация продольных и поперечных волн в автономных донных сейсмических станциях осуществляется посредством трехкомпонентного (х, у, z) сейсмоприемного модуля и гидроакустического датчика давления с последующим накоплением измерительной информации, а местоположения каждой станции на дне моря и при всплытии на поверхность моря определяются с помощью средств гидроакустического и радионавигационного позиционирования, при использовании автономных донных самовсплывающих сейсмостанций, например, типа станций "Ларге"; сейсмокоса дальней зоны удаляется от излучателя на расстояние R, отмечаемое головным буем сейсмокосы дальней зоны, с помощью специального кабеля, имеющего положительную плавучесть, глубина буксировки которого регулируется гидродинамическими заглубителями.
Сущность данного технического решения заключается в реализации системы морской многоволновой многокомпонентной сейсморазведки, которая на основе синергии совокупных синхронных измерений донными сейсмоприемниками и буксируемой косой позволяет обеспечить потенциальную информативность и достоверность измерений при точной геодезической привязке координат точек измерения.
Однако известное техническое решение [4], как и известные технические решения [1, 2, 3], при проведении сейсмологического мониторинга не обеспечивают непрерывную регистрацию сигналов в течение сравнительно длительного периода времени, например в течение месяца, с целью получения достоверной информации, что обусловлено использованием в процессе измерений судов с буксируемой косой, выход которых в море зависит от состояния гидрометеорологических факторов.
Кроме того, в известных технических решениях для временной привязки регистрируемых сигналов используются термостатированные кварцевые генераторы, которые потребляют значительную энергию питания, соизмеримую с потреблением остальной части аппаратуры донных сейсмостанций. Тем самым существенно ограничивается срок их автономной работы на дне.
Кроме того, использование в известном техническом решении [4] автономных донных сейсмостанций [5], снабженных устройством постановки и снятия носителя геофизической аппаратуры со дна моря, выполненное в виде якоря-балласта в виде бетонного диска или прямоугольного параллелепипеда, при размещении станций на дне с неравномерным рельефом не обеспечивает полную и адекватную передачу колебаний грунта на датчики, что искажает результаты измерений, что обусловлено не одинаковой ориентацией станций, а также влиянием придонных течений, которые меняют направление и могут непосредственно раскачивать станцию при неплотном сцеплении с дном, что наблюдается при выполнении якоря-балласта в виде диска или прямоугольного параллелепипеда. Еще один механизм воздействия течений состоит в генерации акустических помех в воде за счет завихрений вокруг выступающих частей станции или неровностей дна в месте установки станции, а также по причине возбуждения акустических колебаний за счет вибрации упругих элементов станции под воздействием турбулентного потока [6, 7]. При этом, в зависимости от характера и скорости набегающего потока за корпусом станции, сочлененной с якорем-балластом, остается ламинарный или турбулентный след. В обоих случаях непосредственно за станцией образуется вихревая зона, которая вызывает его колебания. Ламинарный след отличается отсутствием перемешивания слоев в безвихревой области следа. В случае турбулентного течения появляется дополнительное раскачивание станции за счет пульсаций самого потока.
Основной источник акустической помехи сосредоточен непосредственно за станцией на некотором расстоянии от линии отрыва. Наличие на корпусе станции упругих элементов, представляющих собой тонкомерный трубчатый каркас, антенну, буйреп, соединительные кабели вызывают дополнительные излучения акустической помехи. Колебания этих элементов возбуждаются обтекающим потоком и могут иметь резонансные максимумы, и хотя их добротность невелика вследствие большого сопротивления воды, но вследствие высокой чувствительности сейсмографов эти помехи могут оказывать существенное влияние на сейсмоприемники, расположенные в непосредственной близости от источника турбулентности. Так как частотный диапазон помех совпадает с диапазоном пульсаций турбулентности, лежащих в диапазоне частоты от 0.03 до 500 Гц, а частотный диапазон многоцелевых сейсмометров составляет в среднем 1-200 Гц, то помехи полностью могут его перекрывать. В низкочастотной части диапазона сейсмометра возможно также возникновение помех за счет турбулентных явлений на резко выраженных неровностях дна размером от 1 до 10 м, а с учетом того что нижний предел частот турбулентности зависит от средней скорости течений и размеров донной станции и выступающих упругих элементов, установленных на ее корпусе, то не учет этих параметров при обработке полезных сигналов может привести к существенным дополнительным погрешностям в определении достоверности прогноза.
Задачей предлагаемого технического решения является повышение помехоустойчивости к воздействию внешних помех при выполнении сейсмологического мониторинга на водных бассейнах, а также увеличение срока автономной работы за счет повышения экономичности устройства временной привязки регистрируемой информации.
Поставленная задача достигается за счет того, что в способе морской сейсмической разведки, включающем размещение группами вдоль линии заданного профиля или по заданной площади на морском дне самовсплывающих автономных донных сейсмических станций гидрофонного и геофоного типов, содержащих устройства регистрации сигналов и средства сцепления станции с дном, прием и регистрацию продольных и поперечных волн группами сейсмоприемников по методике многократных перекрытий или одинаковых зондирований, использование скоростных параметров разреза, получаемых при обработке компонентных данных продольных и поперечных волн, синхронно зарегистрированных устройством регистрации, а для интерпретации данных и построения моделей исследуемых объектов используются кинематические и динамические характеристики всей совокупности отраженных, рефрагированных, головных продольных и поперечных волн, определение местоположения станций на дне моря и при всплытии посредством средств гидроакустического и радионавигационного позиционирования, компенсацию температурной погрешности, компенсацию температурной погрешности временной привязки выполняют в процессе обработки информации на судне посредством ввода поправки, определяемой интегрированием функции отношения частот опорного и дополнительного кварцевых генераторов с использованием таблицы поправок, заранее определенной для каждой пары кварцевых резонаторов; возбуждение упругих волн осуществляют путем подачи электрического импульса в морскую среду ограниченного объема, а в устройстве для морской сейсмической разведки, включающем средства регистрации сигналов, выполненные в виде группы донных приемных устройств, состоящих из корпуса, сочлененного с бетонным якорем-балластом посредством размыкателя, с размещенными внутри и на внешней стороне корпуса датчиками сейсмических и гидроакустических сигналов, устройствами регистрации, временной привязки информации, определения ориентации корпуса и устройств гидроакустической связи, дополнительно введен термозависимый кварцевый генератор, источник возбуждения упругих колебаний состоит из катушки возбуждения и свечи зажигания, установленной между прочным корпусом и легким корпусом, который в верхней части выполнен с отверстиями.
Компенсация температурной погрешности цифровым способом посредством ввода поправки временного кода, определяемого интегрированием функции частоты опорного генератора за время наблюдения, позволяет вводить температурные поправки с высокой точностью, определяемой только погрешностью измерения температуры и погрешностью таблицы температурных поправок.
Выполнение источника упругих колебаний в виде катушки возбуждения со свечой зажигания позволяет использовать для достижения технического результата законов электрохимии, что обеспечивает удовлетворение экологическим требованиям, а также требованиям по энергопотреблению.
Совокупность новых отличительных признаков позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Сущность заявляемого технического решения поясняется чертежом, на котором показан схематичный вертикальный разрез автономной донной сейсмической станции.
Автономная донная сейсмическая станция включает прочный корпус 1, легкий корпус 2, сейсмические датчики 3, 4, 5, гидрофоны 6, 7, геофоны 8, 9, блок аналогово-цифровых преобразователей 10, процессор 11, часы 12, блок сопряжения 13, компас 14, наклонометры 15, 16, блок долговременной памяти 17, гидроакустический канал связи 18, размыкатель 19, блок питания 20, стропы 21, балласт 22, источник упругих колебаний, состоящий из двух свечей зажигания 23, 24 и двух катушек возбуждения 25 и 26, блок управления и регистрации 27, основной 28 и дополнительный 29 кварцевые генераторы.
Сейсмические датчики 3, 4, 5 размещены в карданном подвесе, корпус которого сочленен с компасом 14 и наклонометром 15, другой наклонометр 16 установлен между прочным 1 и легким 2 корпусами. На внешней поверхности прочного корпуса 1 установлена мачта 30 с сенсорным кольцом 31, на котором размещаются гидроакустический канал связи 18, гидрофоны 6, 7, геофоны 8, 9, вспомогательное оборудование (при необходимости): радиолокационные отражатели, радиомаяк, антенна спутниковой связи. Размыкатель 19, соединенный со стропами 21, сочлененными с балластом 22, установлен на легком корпусе 2.
Балласт изготовлен из железобетона, имеет чашеобразную форму и тесно прижат снизу к легкому корпусу 2 с помощью упругих строп 21. Другие концы строп присоединены к размыкателю 19, находящемуся в верхней части станции.
Верхняя поверхность легкого корпуса 2 выполнена с отверстиями, через которые полость между легким корпусом 2 и прочным корпусом 1 при постановке станции на дно заполняется морской водой.
Основными особенностями станции являются применение твердотельного накопителя информации на флэш-элементах памяти; использование генератора кода времени с цифровой компенсацией температурной погрешности кварцевого резонатора; быстрое считывание накопленной информации (до 2 Мб в секунду); представление результатов записи в форме, удобной для обработки (формат SEG-Y); малое потребление питания; хорошая обтекаемость придонными течениями.
Подготовка станции на борту судна состоит в замене питания, установке требуемой программы и точного времени, сборке и герметизации, присоединении к якорю-балласту. В верхней части балласта имеются специальные скобы, за которые станция крепится к подъемному механизму и выносится за борт судна при постановке. Станция опускается на дно в свободном падении грузом вниз со скоростью около 1 м/с. После достижения дна станция включается на регистрацию через определенное время, в течение которого записываются показания компаса 14 и наклонометров 15, 16. По каналу гидроакустической связи 18 с судна определяется расстояние до станции и уточняются ее координаты триангуляционным методом. Регистрация сейсмических сигналов и сигналов гидрофонов 6, 7 производится в непрерывном или старт-стопном режимах. Регистрация частот основного и дополнительного термочувствительного кварцевых генераторов производится непрерывно.
Подъем станции производится по внутреннему таймеру или по гидроакустическому сигналу с обеспечивающего судна. В этом случае от блока гидроакустической станции, установленной на судне, подается кодированный сигнал акустический - команда, после приема которой на донной станции подается постоянный ток на размыкатель 19 через воду и тонкий провод, удерживающий упругие стропы. После растворения провода стропы разжимаются и станция всплывает вследствие положительной плавучести корпуса (8 кгс). При этом вследствие специальной балансировки станция переворачивается гидроакустической антенной вниз, а проблесковым маяком вверх. Поплавок-ловитель всплывает рядом со станцией и упрощает ее подъем на борт судна.
Поиск станции на поверхности моря производится с помощью канала гидроакустической связи 18, путем определения расстояния до судна и направления на станцию триангуляционным методом или посредством вспомогательного оборудования.
Реализация предлагаемого способа заключается в следующем.
Производят подготовку станции на борту судна, заключающуюся в установке требуемой программы, точного времени, сборке, герметизации и присоединении ее к якорю-балласту, спуск станции за борт судна. Частоты основного и дополнительного кварцевых генераторов регистрируются непрерывно.
Всплытие станции производится по команде с судна или по таймеру. После подъема на борт и вскрытия станции в судовой компьютер считывается записанная информация.
В процессе обработки сигналов выполняется операция исключения температурной зависимости их временной привязки посредством ввода поправок, определенных для каждого кварцевого генератора, которые хранятся в памяти судового компьютера. При этом погрешность временного кода Δt(tк) определяется интегрированием функции частоты опорного генератора за время наблюдений tк
 ,
,
где f0 - постоянная составляющая и f(t) - текущее значение частоты опорного генератора. Ввиду того что частота опорного генератора и частота зависимого от температуры генератора F(t) зависят в основном от текущего значения температуры при обеспечении конструктивного равенства температур обоих генераторов, их зависимости однозначны f(t)=f[T(t)], F(t)=F[T(t)].
Приведение в соответствие частот опорного и зависящего от температуры генератора выполняется посредством табличного оператора Р:f(F)=P[F], который хранится в памяти компьютера. При этом поправка временного кода определяется выражением
 ,
,
что обеспечивает при работе в диапазоне температур 0-20 градусов С погрешность ухода частоты не хуже 10-8,
При нахождении станции на дне осуществляется возбуждение упругих колебаний посредством подачи напряжения на катушки возбуждения 25 и 26, соединенные со свечами зажигания 23 и 24, с запаздыванием по времени. Свечи зажигания 23 и 24 посылают импульсы тока в морскую воду между прочным 1 и легким 2 корпусами. При этом протекает электрохимическая реакция между ионами водорода и кислорода, возбуждающая упругие колебания (гидроакустические сигналы), которые фиксируются гидрофонами 6, 7 и геофонами 8, 9. Эти же сигналы также могут фиксироваться посредством гидроакустических средств, установленных на судне или размещенных на разных горизонтах по глубине посредством подводных гидроакустических зондов.
Реализация предлагаемого способа и устройства для его осуществления технической трудности не представляет ввиду использования штатных технических средств как самой автономной донной сейсмической станции, так и штатных судовых технических средств, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «промышленная применимость».
Источники информации
1. Патент RU №1829665.
2. Патент RU №2072535.
3. Патент RU №2072534.
4. Описание полезной модели к патенту Российской Федерации RU №31658 U.
5. Описание полезной модели к свидетельству Российской Федерации RU 28778 U1.
6. Kasahara J., Koresava S., Nagumo S. et al. Experemental results of vortex generation araund ocean - bottom seismograph due to bottom current. // Bull, Earthq. Res. Inst. Tokyo; Univ., 1980. V.55. P.169-182.
7. Lighthill M.L. On sound generated aerodynamically; I. General theory. London: Proc. Roy. Soc., 1970. A 211.1107 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2005 |
|
RU2294000C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388023C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| ДОННАЯ СТАНЦИЯ | 2012 |
|
RU2484504C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| АВТОНОМНАЯ ДОННАЯ ШИРОКОПОЛОСНАЯ СЕЙСМОСТАНЦИЯ | 2014 |
|
RU2572047C1 |
Изобретение относится к области морской сейсморазведки и может быть использовано для поиска морских углеводородных месторождений. Сущность: система включает средства регистрации сигналов, выполненные в виде группы донных приемных устройств. Приемные устройства состоят из прочного корпуса, внутри которого размещены датчики сейсмических сигналов, устройства регистрации, устройства временной привязки информации, устройства определения ориентации корпуса. Приемные устройства также снабжены легким корпусом, верхняя полость которого выполнена с отверстиями, через которые полость между легким корпусом и прочным корпусом при постановке станции на дно заполняется морской водой. Легкий корпус в нижней части сопряжен с якорем-балластом посредством размыкателя и упругих строп. Якорь-балласт изготовлен из железобетона и имеет чашеобразную форму. Между прочным и легким корпусами установлен источник возбуждения упругих колебаний, состоящий из катушки возбуждения и свечи зажигания, а также еще один датчик определения ориентации корпуса. На внешней поверхности прочного корпуса установлена мачта с сенсорным кольцом, на котором размещены гидроакустический канал связи, гидрофоны и геофоны. Технический результат: повышение точности измерений, повышение экологичности и экономичности системы. 1 ил.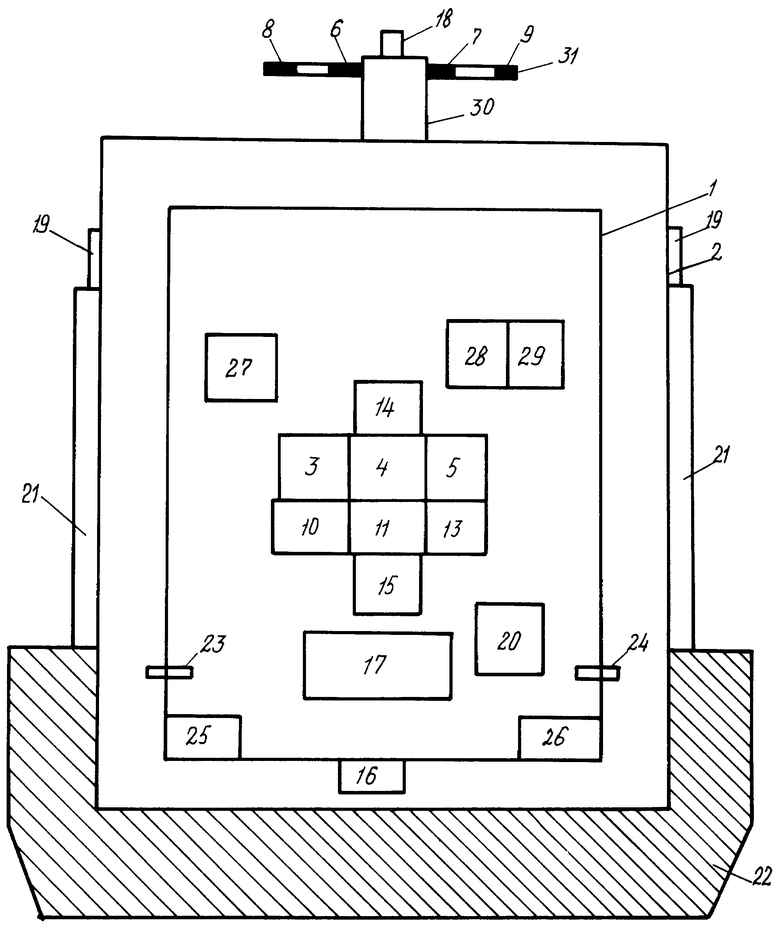
Система для морской сейсмической разведки, включающая средства регистрации сигналов, выполненные в виде группы донных приемных устройств, состоящих из прочного корпуса, внутри которого размещены датчики сейсмических сигналов, устройства регистрации, устройства временной привязки информации, устройства определения ориентации корпуса, отличающаяся тем, что приемные устройства дополнительно снабжены легким корпусом, верхняя полость которого выполнена с отверстиями, через которые полость между легким корпусом и прочным корпусом при постановке станции на дно заполняется морской водой, легкий корпус в нижней части сопряжен с якорем-балластом посредством размыкателя и упругих строп, якорь-балласт изготовлен из железобетона и имеет чашеобразную форму, между прочным и легким корпусом установлен источник возбуждения упругих колебаний, состоящий из катушки возбуждения и свечи зажигания, а также еще один датчик определения ориентации корпуса, на внешней поверхности прочного корпуса установлена мачта с сенсорным кольцом, на котором размещены гидроакустический канал связи, гидрофоны и геофоны.
| Термопара | 1932 |
|
SU31658A1 |
| US 4402382 А, 06.09.1983 | |||
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2072534C1 |

