Изобретение относится к области морской сейсморазведки и может быть использовано для получения сейсмических изображений при детализации сложно построенных геологических объектов на этапе разведки и разработки месторождений нефти и газа, а также изучения строения придонной части разрезав инженерных целях, в том числе и при производстве изыскательских исследований в обеспечении работ по прокладке магистральных трубопроводов по дну водоемов, например озер и морей.
Известен способ морской сейсмической разведки [1], включающий возбуждение и регистрацию отраженных волн вдоль профиля посредством приемных устройств при перемещении по профилю источника и приемного устройства прямым и обратным курсом с последовательным изменением расстояния между источником и приемным устройством. При этом источник перемещают с помощью дополнительного судна с фиксированным расстоянием от основного судна и с той же скоростью движения. При этом приемное устройство, перемещаемое основным судном, устанавливают вдоль профиля с определенным углом наклона вертикали, а на конце приемного устройства закрепляют кондеп и в процессе движения поддерживают его на определенной глубине. При этом выполняют разноглубинное накапливание и обработку информации путем двойного суммирования по фиксированной общей глубинной точке.
Технический результат известного способа, заключающийся в обеспечении повышения детальности и информативности сейсморазведки на этапе разведки и разработки месторождений нефти и газа, а также изучения строения рельефа дна и придонной части разреза в инженерных целях достигается за счет того, что в способе морской сейсмической разведки, включающем возбуждение упругих колебаний и регистрацию приемными устройствами отраженных волн вдоль профиля, а также разноглубинное накапливание информации при фиксированной точке отражения, перемещение многоканального приемного устройства осуществляется основным судном с определенным углом наклона приемного устройства относительно вертикали, а перемещение источника осуществляется вспомогательным судном с той же скоростью, что и основное судно на заданном расстоянии, а связь между углом наклона приемного устройства и расстоянием между судами и глубиной излучаемого объекта осуществляется через математическое выражение, которое выводится из рассмотрения прямоугольного треугольника, образованного катетами (глубина излучаемого объекта и половина расстояния между судами, соответственно) и гипотенузой (равной длине пробега луча от точки отражения на границе до первого канала приемного устройства), при расстоянии фиксированного угла наклона приемного устройства за счет применения специального устройства кондепа, которое крепится на конце приемного устройства и при помощи горизонтальных лучей занимает задаваемую с основного судна определенную глубину, что должно обеспечивать необходимый угол наклона приемного устройства. При этом задаваемая определенная глубина определяется в соответствии с математическим выражением, получаемым из рассмотрения прямоугольного треугольника, образованного катетом (величина задаваемой определенной глубины) и гипотенузой (длина приемного устройства) с заданным углом между ними.
Проведение сейсморазведочных морских работ при поддержании приемных устройств с фиксированным углом наклона и производстве работ с расстоянием между судами, обеспечивающем регистрацию всеми каналами приемного устройства информации от одной точке отражения является основным отличием известного способа [1] от аналогов [2, 3].
Существенным недостатком данного способа, ограничивающим достижение технического результата, является необходимость выполнения высокоточного координирования для обеспечения фиксированного постоянного расстояния между основным и вспомогательным судами, а также обеспечение равных скоростей движения судов и обеспечения равномерности глубины излучаемого объекта, В противном случае числовые величины, получаемые через математические выражения, основанные на геометрических соотношениях расположения средств получения исходной информации на акватории, в частности, при внешних гидрометеорологических условиях, отличных от штилевых или близких к штилевым, могут существенно отличаться от галса к галсу, что может привести к значительным погрешностям при получении итоговых результатов исследований. Наиболее сложным в техническом аспекте является выполнение требования по обеспечению равных скоростей движения двух судов. Выполнение данного требования отягощается необходимостью проведения дополнительных работ по учету потери скорости каждым судном в реальных условиях плавания (ветер, волнение, течение, глубины) в зависимости от их технических и эксплуатационных характеристик (степень обрастания корпуса, осадка и т.д.) на момент проведения исследований.
Кроме того, данный способ трудоемкий как в техническом, так и финансовом отношениях. Необходимость выполнения условия постоянства расстояния между двумя судами и равномерности их скоростного режима позволяет использовать данный способ только в зоне действия дифференциальных станций спутниковых навигационных систем или в зоне действия радионавигационных систем ближнего радиуса действия и желательно при благоприятных погодных условиях, что существенно снижает функциональные возможности способа и сужает область его применения.
Известный способ морской поляризационной сейсморазведки и устройство для его осуществления [4], сущность которого заключается в излучение и приеме продольных и обменных упругих волн в старт-стопном режиме во время укладки приемных устройств на морское дно и нахождении их в состоянии покоя, включающий возбуждение источниками продольных упругих волн группами сейсмоприемников по методике многократных перекрытий или одинаковых зондирований. При этом, технический результат, заключающийся в повышении информативности морской сейсморазведки шельфа и расширение области применения поляризационной сейсморазведки путем создания морской технологии наблюдений не продольных упругих волн при непрерывном движении судна вдоль профиля достигается за счет излучения продольных волн, я прием продольных и обменных волн осуществляют в моменты укладки приемных устройств на морское дно, время разрешенного приема фиксируют по пороговому уровню шума приемников, расположенных в сейсмокосах, а прием и регистрацию упругих волн различных типов осуществляют соответствующими группами сейсмоприемников продольного и геофонного типов, размещенных в одном комбинированном или нескольких специализированных приемных устройствах.
Техническая реализация известного способа [4] осуществляется посредством устройства для морской поляризационной сейсморазведки, содержащего последовательно соединенные приемные устройства многоканальный усилитель, коммутатор, регистратор, блок воспроизведения, а также устройство управления и последовательно соединенные устройство подачи команд на возбуждение и источник упругих волн, причем выходы устройства управления соединены с управляющими входами коммутатора, регистратора и блока воспроизведения, а также пороговое устройство и схему запуска управляющего устройства, причем вход порогового устройства соединен с выходом многоканального усилителя, выход порогового устройства соединен с входом схемы запуска управляющего устройства и с входом устройства подачи команд на возбуждение, а выход схемы запуска соединен с управляющим входом устройства управления. При этом приемные устройства выполнены в виде шланговых комбинированных или кабельно-модульных приемных устройств гидрофонного и геофонного типов, каждое из которых предназначено для регистрации всех типов упругих волн или специализировано на приеме одной компоненты волнового поля с заданной поляризацией.
Приемные устройства, реализующие данный способ, выполняются в виде шланговых сейсмокос комбинированного типа, содержащих в себе приемники, предназначенные для приема определенных типов волн (в том числе приемников для приема продольных упругих волн и ориентированных соосно с косой горизонтальных геофонов для приема обменных волн Х-поляризации), либо в виде кабельно-модульных устройств, где симметричные или азимутальные геофонные установки, снабженные системами самоориентации, помещены в герметические корпуса модулей, соединенных между собой многоканальными кабелями. При этом приемное устройство содержит в себе одно или несколько приемных устройств, многоканальный усилитель, коммутатор, регистратор, блок воспроизведения, устройство управления, устройство подачи команды на возбуждение, источник упругих волн, а также пороговое устройство и систему запуска.
Применение в известном способе и устройстве для его осуществления [4] донных приемных устройств, а для изучения геологического разреза применение как отраженных, так и преломленных волн, с подразделением модификации систем наблюдения методом непрерывного профилирования с перемещением излучающей и приемной части аппаратурного комплекса синхронно с помощью одного судна, и на группу наблюдения методом стационарных наблюдений, при котором приемные устройства сохраняют постоянное положение на дне моря, а источник возбуждения упругих волн перемещается вдоль линии наблюдений выгодно отличает его от известного способа [1].
Однако, как и в способе [1], в известном способе [4] получение конечных результатов с требуемой погрешностью во многом определяется степенью точности определения величин, входящих в формульную зависимость, в частности, угла падения продольной волны на отражающую границу скоростей распространения поперечных и продольных волн, а также продольных волн в морской воде, определение величин которых требует наличия специальной аппаратуры, для определения соответствующих поправок в период всего процесса измерений, так как гидрометеорологические факторы не являясь постоянными могут вносить погрешности в измерения, и как следствие и в конечные результаты исследований.
Кроме того, необходимость постоянного перемещения судна вдоль линий наблюдений, соответствующими галсами требует наличия высокоточных средств координирования, что может быть обеспечено только при производстве работ в зоне действия дифференциальных станций спутниковых навигационных систем или в зоне действия высокоточных радионавигационных систем ближнего радиуса действия, которые, как правило, стационарно развернуты в районах крупных портов, или в районах с стесненными в навигационном отношении условиями плавания, имеющих интенсивное судоходство. Необходимость непрерывного движения судна вдоль профиля со скоростью 2-3 узла накладывает существенные ограничения на использование способа, обусловленные наличием только благоприятных гидрометеорологических условий, так как равномерное удерживание судна на малых скоростях с буксируемым устройством (косой) является весьма сложной задачей.
Известны также способы морской сейсморазведки и сейсмологического мониторинга и устройства для их осуществления, основанные на постановке с плавательных средств автономных донных сейсмостанций [5, 6], имеющих режим самовсплытия и представляющие [6] собой прочный корпус, внутри которого расположены трехкомпонентный блок сейсмоприемников в карданном подвесе, блок управления и регистрации, блок канала гидроакустической связи, источник питания. К блоку сейсмоприемников прикреплены компас и наклономер, другой наклономер соединен с корпусом. Снаружи прочного корпуса находятся антенна гидроакустической связи, измерительный гидрофон, проблесковый маяк, размыкатель балласта и защитное ограждение. Балласт изготовлен из железобетона, имеет чашеобразную форму и тесно прижат снизу к корпусу станции с помощью упругих строп. Другие концы строп присоединены к размыкателю балласта, находящемуся в верхней части станции. На дне балласта в специальном углублении размещен поплавок-ловитель, соединенный пропиленовым фалом с корпусом станции.
Основными особенностями станции являются применение твердотельного накопителя информации на флэш-элементах памяти, использование генератора кода времени с цифровой компенсацией температурной погрешности кварцевого резонатора, быстрое считывание накопленной информации (до 2 Мб/с), представление результатов записи в форме, удобной для обработки (формат SEG-Y), малое потребление питания, хорошая обтекаемость придонными течениями.
Данный способ включает подготовку станции на борту судна, заключающегося в замене питания, установке требуемой программы и точного времени, сборке и герметизации, присоединения к балласту. Опускание на дно выполняется посредством судового подъемного механизма, к которому станция крепится через специальные скобы и выносится за борт. Станция опускается на дно в свободном падении балластом вниз со скоростью 1 м/с. После достижения дна станция включается на регистрацию через определенное время, в течение которого записываются показания компаса и наклономеров. По гидроакустическому каналу с судна определяется расстояние до станции и уточняются ее координаты триангуляционным методом. Регистрация сейсмических сигналов и сигнала гидрофона производиться в непрерывном или старт-стопном режимах. Подъем станции производится по внутреннему таймеру или по гидроакустическому сигналу с обеспечивающего судна. В этом случае от гидроакустическою блока подается постоянный ток на размыкатель балласта через воду и тонкий провод, удерживающий упругие стропы. После растворения провода стропы разжимаются и станция всплывает вследствие положительной плавучести корпуса. При этом вследствие специальной балансировки станция переворачивается гидроакустической антенной вниз, а проблесковым маяком вверх. Поплавок-ловитель всплывает рядом со станцией и облегчает ее подъем на борт судна. Поиск станции на поверхности производится с помощью гидроакустического канала связи путем определения расстояния до судна и направления на станцию триангуляционным методом.
В отличие от известных способов [1, 4] обеспечивается возможность получения полезных сигналов на глубинах до 6000-6700 метров в течение 20-30 суток, отсутствует необходимость выполнения непрерывных галсов судами обеспечения, что существенно снижает трудоемкость и материальные затраты с получением адекватной исходной измерительной информации при достаточно высокой чувствительности, большом динамическом (порядка 115 дБ) и частотном (3-300 Гц) диапазонах регистрации сигналов, с возможностью выполнения работ по регистрации сигналов в непрерывном или старт-стопном режимах при достаточной помехоустойчивости к воздействию внешних помех, с возможностью при необходимости изменения частотного диапазона и числа каналов регистрации.
Однако, как и при любом измерении сигналов, а тем более в активной водной среде, данный способ и устройству для его осуществления имеет ряд недостатков, которые заключаются в следующем.
1. Основная погрешность часов донной сейсмостанции определяется температурной зависимостью частоты кварцевого генератора. Для исключения этой зависимости применяются термостатирование кварцевого генератора или измерение температуры и введение термокомпенсации, в том числе и цифровой [6, с.72]. Однако кварцевые генераторы подвержены старению и их частота растет со временем, поэтому их необходимо периодически проверять и корректировать, а выполнение корректировки цифровых компенсированных генераторов автоматически по специальным программам с использованием сигналов от GPS [6, с.73] потребует многократной постановки и подъема станций, что существенно увеличит трудоемкость и нарушит непрерывность выполнения работ.
2. Существенным источником погрешностей для донных сейсмостанций являются придонные течения, которые при неблагоприятном стечении ряда обстоятельств (геометрические соотношения станций с их наружными элементами, скорости подводных течений, рельеф дна в местах установки с ярко выраженными неровностями размером от 1 до 10 м) могут привести к возникновению помех с частотами 0,03-500 Гц в низкочастотной части диапазона сейсмометра (1-200 Гц), что приведет к полному перекрытию рабочего диапазона [6, с.75].
3. Трудоемкость обработки полученных результатов, что обусловлено тем, что вследствие быстрого затухания акустической энергии в океане мощность принимаемых сигналов оказывается ниже уровня естественных помех, поэтому для выделения полезной информации, записанной на флэш-картах применяют тонкие методы спектрального анализа и когерентной обработки сигналов.
В известном способе [7] измерения выполняют с помощью дрейфующих буев, устанавливаемых с судов в большом количестве и которые имеют заглубленные излучатели (100-400 Гц) и приемники (полоса 120 Гц), что обеспечивает снижение отношения сигнал-помеха в кодовой последовательности до 20 дБ и повышение точности измерения времени распространения до 18 млс. При этом в системе измерений используются линейные частотно-модулированные сигналы со сжатием импульсов (для компенсации доплеровского сдвига частоты). Аналоги приемных устройств, которые описаны в [8, 9].
Однако для регистрации сигналов и последующей их обработки, при исследованиях сравнительно мелкомасштабных гидрологических и сейсмических процессов погрешность временных измерений должна быть не выше 1 млс, что при использовании данного способа не обеспечивается.
В известных способах посредством метода, основанного на измерении разности времен прихода сигналов при соответствующей обработке можно довольно точно восстановить форму профиля скорости звука Однако такой метод вариационно неустойчив к величине постоянного по глубине течения и может давать при его оценке сравнительно большую систематическую ошибку, которая имеет вид аддитивной постоянной по глубине добавки к профилю скорости звука с величиной 0,02-0,03 м/с.
Задачей заявляемого технического предложения является повышение точности измерения сигналов путем компенсации систематической погрешности.
Поставленная задача достигается за счет того, что в способе морской поляризационной сейсморазведки, включающим размещение средств регистрации в водной среде, излучение, прием и регистрацию сигналов группами сейсмоприемников гидрофонного и геофонного типов по методике многократных перекрытий или одинаковых зондирований, измерение трехмерных полей скорости звука, температуры, солености и поля скорости течения, с последующим восстановлением характеристик среды по измерениям задержек сигналов, определение взаимного расположения средств регистрации относительно друг друга, в котором средства регистрации размещают на глубинах, равных 1/3 и 2/3 средней максимальной глубине с образованием треугольника в каждой группе, в углах которого размещены средства регистрации, посредством которых формируют псевдослучайные сигналы, синхронно их излучают в диапазоне частот 2000-5000 Гц с формированием глубоководного луча, а по принятым сигналам определяют циркуляцию поля вдоль замкнутых лучевых траекторий путем сравнения прямого измерения разности времен по кругу во взаимно противоположных направлениях по разным лучам, и по этой разности, получаемой для каждой группы средств регистрации, определение взаимного расположения средств регистрации относительно друг друга выполняют после реконструкции поля скорости звука по задержке сигнала по глубоководному лучу, перед размещением средств регистрации в водной среде их подвергают калибровке путем определения минимального и максимального значения кода датчиков уклонов кардана с занесением его в энергонезависимую память. При этом в устройстве для осуществления способа, состоящем из прочного корпуса сферической или цилиндрической формы, внутри которого размещены средства излучения, приема и регистрации сигналов, вспомогательные элементы, при этом средства излучения и приема сигналов выполнены в виде акустической системы - приемная акустическая система выполнена по линейной схеме, состоящей из восьми гидрофонов, расположенных в верхней части прочного корпуса, в нижней части которого размещен акустический размыкатель.
Новые отличительные признаки, заключающиеся в размещении средств регистрации на глубинах, равных 1/2 и 2/3 средней максимальной глубине с образованием треугольника в каждой группе, в углах которого размещены средства регистрации, посредством которых формируют псевдослучайные сигналы и синхронно их излучают в диапазоне частот 2000-5000 Гц с формированием глубоководного луча с выполнением приемной акустической системы по линейной схеме, состоящей из восьми гидрофонов, расположенных в верхней части прочного корпуса при сравнении прямого измерения разности времени распространения сигналов по кругу во взаимно противоположных направлениях по трем разным лучам и этой разности, полученной в результате решения задачи для каждой пары средств регистрации позволяет компенсировать систематическую ошибку, т.к. такое прямое измерение разности времени распространения по кругу во взаимно противоположных направлениях по различным лучам не зависит от расхождения часов регистрирующих устройств и не требует использования очень стабильных и дорогостоящих таймеров. Определение разности задержек при распространении во встречных замкнутых направлениях вдоль сторон треугольника, образованного средствами регистрации, и измеренной непосредственно к этой величине, полученной в результате решения обратной задачи по трем лучам дает три независимых уравнения для значений трех систематических ошибок, которые определяются в результате решения этих уравнений. Использование высокочастотной широкополосной акустической системы в диапазоне частот обеспечивает потенциально большее разрешение при заданной точности.
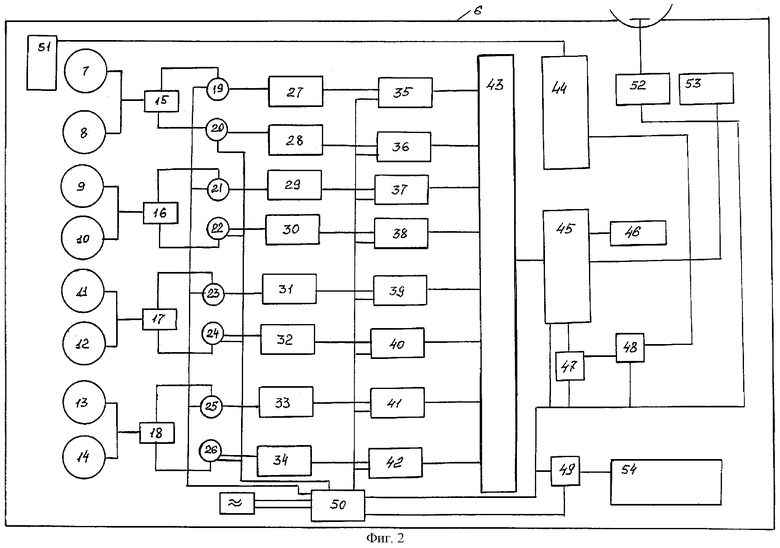
Сущность заявляемого технического решения поясняется чертежами. Фиг.1. Размещение средств регистрации в водной среде. Средства регистрации 1 в водной среде размещаются с образованием треугольника 2. Для размещения средств регистрации 1 могут быть использованы стандартные системы измерителей течения. При этом средства регистрации 1 могут быть установлены в верхней части системы измерителей течений, укрепленных на разных глубинах через вертлюги 3 к фалу 4 со стеклянными поплавками 5 с акустическим размыкателем 6 в нижней части системы. Фиг.2. Средство регистрации. Средство регистрации 1 состоит из прочного корпуса 6, внутри которого в верхней части расположена приемная акустическая линейная система из восьми гидрофонов 7, 8, 9, 10, 11, 12, 13, 14, установленных в карданном подвесе. Расстояние между элементами λ/2, где λ=1500/f - длина волны, f=2-5 кГц - несущая частота. При смене несущей частоты сигнала предусмотрена возможность изменения расстояния между элементами системы. Аналоговые цепи включают высокочувствительные малошумящие усилители 15, 16, 17, 18 с полосовым фильтром второго порядка со следующими параметрами: коэффициент усиления - 1000, ширина полосового фильтра 2Δf=1÷2 кГц, уровень внутреннего шума 0,8 мкв/кГц. Ключевые умножители 19, 20, 21, 22, 23, 24, 25, 26 отфильтрованного сигнала на синусный и косинусный меандры. Усилители низкой частоты 27, 28, 29, 30, 31, 32, 33, 34 (усиление =30) с низкочастотным фильтром с полосой Δ/f=1÷2 кГц. Схемы выборки-хранения 35, 36, 37, 38, 39,40, 41, 42 с частотой выборки fd=2Δf. Преобразователь аналог-код 43 (16 каналов, 14 разрядов, время преобразования 10 мс).
Ключевой усилитель мощности 44 (частота f=2÷5 кГц, ширина полосы 2Δf=1÷2 кГц, мощность 500 Вт, время непрерывной работы 30 с).
Цифровые цепи и микровычислигель включают следующие элементы: микрокомпьютер 45, включаемый на время приема или передачи сигналов от внешних источников, цифровой накопитель 46 на жестком диске емкостью 1 Гбайт, D-триггер 47, фиксирующий момент начала кодового символа с импульсом синхронизации, фазовый модулятор 48 на сумматоре по модулю два, S-R триггер 49 для сравнения секундных импульсов временного эталона с импульсами точного времени, например от группы средств регистрации информационно-связанной с береговой диспетчерской станцией по гидроакустическому каналу связи, синхронизатор 50 системы точного времени, который все время находится под питанием и выключается только после снятия средства регистрации и измерения задержки секундного импульса по отношению эталонному временному импульсу берегового средства (например, спутниковой навигационной системы) или временных импульсов других групп средств регистрации. Стабильность кварцевого генератора 10-8. Передающий акустический излучатель 51.
Вспомогательные элементы представляют собой стандартное оборудование, которое подключается к средству регистрации 1 перед погружением или после подъема на поверхность моря и включают приемоиндикатор 52 спутниковой навигационной системы с точными секундными импульсами времени на выходе, персональный компьютер 53 для считывания информации с накопителя на жестком диске, измеритель временных интервалов 54 для измерения расхождения временных меток разных средств регистрации между собой или по отношению к данным, полученным по приемоиндикатору 52, а также батареи питания, акустические размыкатели, радио и световые маяки, используемые для нормальной постановки, эксплуатации и снятия с поверхности моря средств регистрации, датчики уклонов кардана, эталон времени с термостабилизацией, а также и при необходимости и геофоны.
Сущность способа заключается в следующем.
Перед размещением средств регистрации в водной среде их подвергают калибровке путем определения минимального и максимального значения кода датчиков уклонов кардана с занесением его в энергонезависимую память.
Для этого запускается соответствующая команда. Датчик ориентируется в пространстве так, чтобы добиться минимального значения кода по оси X, что соответствует горизонтальному положению вертикальной оси датчика в соответствующей вертикальной плоскости, и записывается значение кода. Далее датчик переворачивается в соответствующей вертикальной плоскости и путем манипуляций его ориентации устанавливают максимальное значение кода, и записывают это значение кода. Манипуляции повторяются и для второй оси чувствительности датчика Полученный набор чисел заносится в энергонезависимую память средств регистрации.
По точным секундным импульсам времени от приемоиндикатора 52 через синхронизатор 50 системы точного времени вводят временные метки в эталон времени с термостабилизацией средств регистрации.
Устанавливают средства регистрации 1 в водной среде на глубинах, равных 1/3 и 2/3 средней максимальной глубине, которую определяют заранее по данным промеров, с образованием треугольника в каждой группе, в углах которого размещены средства регистрации 1, посредством передающего акустического излучателя 51 формируют псевдослучайные сигналы, которые синхронно излучают в диапазоне 2000-5000 Гц с формированием глубоководного луча, который проходит снизу по глубинам, превышающим 600 метров (при установке одного из средств регистрации на глубине 600 метров и расстояниях между средствами регистрации одной группы 35 км друг от друга), где среда практически неизменчива (поэтому полусумма времени распространения сигналов во встречных направлениях зависит только от взаимного расположения регистрирующих устройств). Так как при больших расстояниях между средствами регистрации эта полусумма для глубоководного луча сохраняет слабую зависимость от свойств среды, то для восстановления поля скорости звука используются не абсолютные времена задержек как в известных способах, а разности между приходом первого глубоководного луча и временами приходов сигналов по остальным лучам. После реконструкции поля скорости звука задержка сигнала по глубоководному лучу используется для определения взаимного расположения средств регистрации друг относительно друга, что позволяет отказаться от дорогостоящих систем позиционирования. По восстановленному полю скорости звука с помощью известных S-Т диаграмм, построенных по результатам многолетних гидрологических измерений для конкретного района по сезонам и значений глубины восстанавливаются поля температуры, плотности и солености.
При размещении в водной среде трех средств регистрации 1 треугольником по принятым приемными акустическими линейными системами, включающими восемь гидрофонов (поз.7-14, фиг.2) сигналам определяют циркуляцию поля вдоль замкнутых лучевых траекторий по разности времени распространения сигналов во встречных направлениях. При этом разность времени распространения сигналов вдоль замкнутого пути из разных лучей по кругу во встречных направлениях не зависит от расхождения показаний часов средств регистрации, так как измеряемая циркуляция равна ротору или вихрю поля скорости течения, что позволяет используя разницу задержек по кругу во встречных направлениях у лучевых траекторий, проходящих на разных глубинах восстанавливать зависимость ротора от глубины. Это обстоятельство также позволяет существенно увеличить процесс измерений в отличие от устройств для реализации известных способов, в которых применение кварцевого эталона времени с термостабилизацией позволяет удерживать точность временных отсчетов в интервале 1 мс только в течение полутора суток.
Практическая точность временных измерений, определяемых зависимостью δτ≈Т/Δf, и разрешение и точность вдоль луча распространения сигналов, а также разрешение и точность по глубине в соответствии с неравенствами, полученными в соответствии с неравенством Крамера-Рао (Yoon, J.Н. The seasonal variation of the East Korean Warm Current. Reports of Research Institute for Applied Mechanics, 38, p.23-36, 1991), имеющими вид соответственно:
 и
и 
показывают, что высокочастотные широкополосные акустические системы обеспечивают потенциально большее разрешение при заданной точности.
Источники информации
1. Патент РФ №2072535 С1.
2. Проспект фирмы "Terr Marine Engineering, USA, Dallas, Texas, Radio telemetry seusmic technology, 1988, p.2-9.
3. Патент США №4992992.
4. Патент РФ №2072534 С1.
5. Патент РФ №20725539 С1.
6 Современные донные станции для сейсморазведки и сейсмологического мониторинга./Зубко Ю.Н., Левченко ДГ., Леденев В.В. и др.//Научное приборостроение, 2003, том 13, №4, с.70-82.
7. Analysis of finite-duration wide band frequency sweep signals for ocean tomography. Duda Timothy F., IEEE J.Ocean, 1993, 18, p.p.22-228.
8. Патент РФ №2081434 С1.
9. Патент США №4975889.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ ЗАГРЯЗНЕНИЙ ВОДНОЙ СРЕДЫ, ДОННЫХ ОТЛОЖЕНИЙ И АТМОСФЕРЫ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ, УЛОЖЕННЫХ НА ДНЕ ВОДОЕМОВ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331876C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2007 |
|
RU2348950C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
Изобретение относится к области морской сейсморазведки и может быть использовано для получения сейсмических изображений. Заявлен способ морской поляризационной сейсморазведки, заключающийся в размещении средств регистрации в водной среде, излучении, приеме и регистрации волн группами сейсмоприемников гидрофонного и геофонного типов по методике многократных перекрытий или одинаковых зондирований, измерении трехмерных полей скорости звука, температуры, плотности, солености и поля скорости течения, с последующим восстановлением характеристик среды по измерениям задержек сигналов. Средства регистрации размещают на глубинах, равных 1/3 и 2/3 средней максимальной глубины с образованием треугольника, в углах которого размещены средства регистрации, посредством которых формируют псевдослучайные сигналы. Синхронно излучают сигналы в диапазоне частот 2000-5000 Гц, а по принятым сигналам определяют циркуляцию поля вдоль замкнутых лучевых траекторий путем сравнения прямого измерения разности времен по кругу во взаимно противоположных направлениях по различным лучам. По этой разности, получаемой для каждой группы средств регистрации, определение взаимного расположения средств регистрации друг относительно друга выполняют после реконструкции поля скорости звука по задержке сигнала по глубоководному лучу. Технический результат: повышение детальности и информативности сейсморазведки. 1 з.п. ф-лы, 2 ил.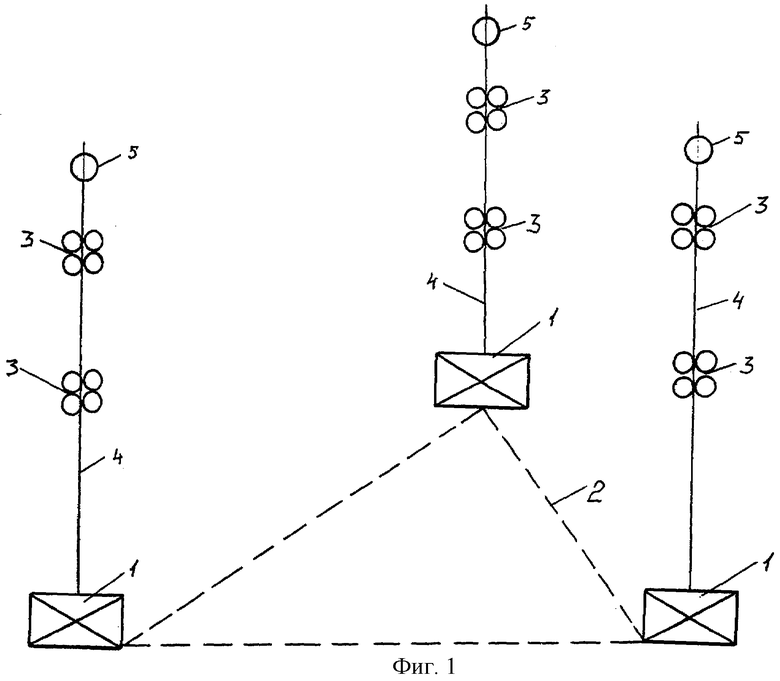
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2072534C1 |
| ПРИЕМНАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА С ЛУЧЕВОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ И СИСТЕМА ПИТАНИЯ ЕЕ ЭЛЕКТРОННОЙ АППАРАТУРЫ | 1993 |
|
RU2042147C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1992 |
|
RU2072535C1 |
| US 4992992 A, 12.02.1991 | |||
| US 4745583 A, 17.05.1980 | |||
| US 4604734 A, 05.08.1986. | |||

