Изобретение относится к кораблестроению и представляет собой средство для плавания под поверхностью воды.
Известны корабли для подводного плавания под общим названием "подводные лодки", конструкция которых обязательно содержит прочный корпус, гидродинамический движитель, управление курсом и средства погружения-всплытия (см., например, Томас К. Гилмер. Проектирование современного корабля, перевод с английского, Ленинград, "Судостроение", 1984 г., стр.18, 55-61, 97-101). Погружение и всплытие подводных лодок осуществляется посредством заполнения водой балластных цистерн при погружении и освобождением их от воды, например, путем "продувки" - вытеснением воды сжатым воздухом при всплытии. Этот способ осуществления погружения-всплытия требует наличия на борту подводного судна специального оборудования и значительных энергетических затрат. Поэтому он характеризуется низкой безопасностью: при отказе системы освобождения от балласта в подводном положении всплытие корабля невозможно.
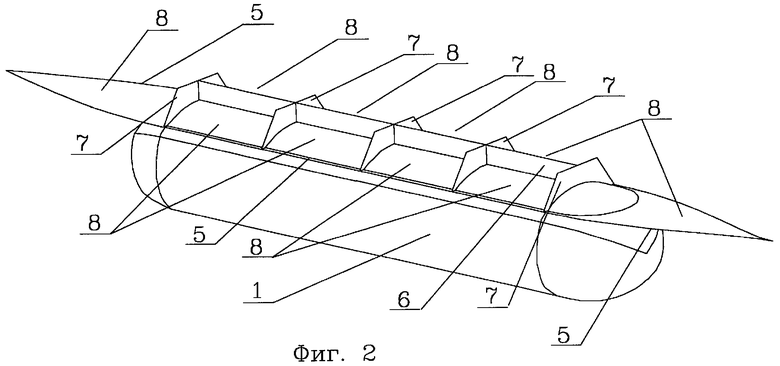
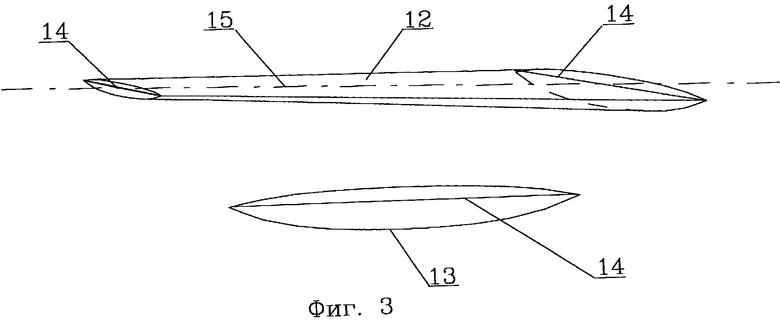
Предлагаемое изобретение лишено этих недостатков. Конструкция подводного аппарата и его составляющих представлена на фиг.1-3. Подводный аппарат состоит из прочного корпуса 1, окруженного снаружи гидродинамическим обтекателем 2 для уменьшения сопротивления движению и расхода энергии на движение, а также имеет обычные для кораблей движитель 3 и управление курсом 4. Общий вид подводного аппарата представлен на фиг.1. Прочный корпус 1 имеет положительную плавучесть. Обтекатель 2 ниже ватерлинии 16 свободно проницаем для воды, так что в этой части пространство между прочным корпусом и обтекателем всегда заполнено водой, даже когда аппарат на плаву. Средства обеспечения этой проницаемости могут быть любыми и здесь не показаны. Выше ватерлинии объем между обтекателем и прочным корпусом водонепроницаемыми стенками - "переборками" - горизонтальной 5 на уровне ватерлинии 16, продольной вертикальной 6 в плоскости симметрии корпуса и несколькими поперечными вертикальными 7 разделен на ряд отсеков 8. Все отсеки снабжены отверстиями 9, 10 в верхней и нижней бортовой частях отсеков. Отверстия снабжены открывающимися крышками 11. Расположение переборок, разделяющих эти отсеки (при снятом обтекателе) показано на фиг.2. Ниже ватерлинии в носовой и кормовой частях аппарата по его бортам установлены две пары полноповоротных крыльев 12. Крылья подводного аппарата имеют трапециевидную форму в плане и двояковыпуклый профиль 13, составленный из кривых с монотонной производной, причем кривые эти имеют максимум вблизи середины хорды 14. Ось вращения 15 крыльев проходит через середины хорд. Крыло с осью вращения и его профиль показаны на фиг.3. Такая конструкция обеспечивает высокое гидродинамическое качество крыла и наименьший момент сопротивления его поворотам.
Погружение-всплытие и подводное плавание подводного аппарата осуществляются следующим образом. Перед погружением отверстия 9, 10 открываются, крылья 12 поворачиваются в положение отрицательного угла атаки и аппарат приводится в движение. По достижении скорости, когда сила погружения - отрицательная подъемная сила - на крыльях превышает выталкивающую силу на прочном корпусе, аппарат полностью погружается, крышками 11 отверстия 9, 10 балластных отсеков закрываются.
В результате общая плавучесть аппарата, определяемая, например, как разность между плотностью воды и "плотностью корабля" (то есть отношения массы корабля к вытесняющему объему), уменьшается по сравнению с начальной - до погружения, уменьшается и выталкивающая сила, аппарат продолжает погружаться. По достижении желаемой глубины погружения крылья поворачиваются в положение, когда погружающая и выталкивающая силы становятся равными и погружение прекращается. В дальнейшем поворот крыльев используется для маневрирования по глубине.
Для всплытия можно воспользоваться одним из следующих способов или любыми их сочетаниями одновременно.
1. Крылья аппарата поворачиваются для установки такого угла атаки, когда погружающая сила меньше выталкивающей, и аппарат начинает всплытие; по достижении некоторой небольшой глубины отверстия 9, 10 открываются, крылья аппарата устанавливаются в положение нулевой погружающей силы, и аппарат окончательно всплывает.
2. Аппарат останавливается, в результате чего исчезает погружающая сила, и аппарат начинает всплывать; по достижении некоторой небольшой глубины отверстия 9, 10 открываются, и аппарат окончательно всплывает.
3. Отверстия 9, 10 открываются, выталкивающая сила превышает погружающую и самолет начинает всплытие; по достижении некоторой небольшой глубины крылья самолета устанавливаются в положение нулевой погружающей силы и самолет окончательно всплывает.
4. Аппарат останавливается, отверстия 9, 10 открываются и самолет всплывает.
Одновременное применение способов 1 и 3 можно использовать для экстренного всплытия. Наличие на аппарате нескольких балластных отсеков 8 по бортам и вдоль корпуса позволяет использовать их для управления креном и дифферентом подводного аппарата в подводном положении, то есть расширяет его маневренные возможности по сравнению с таковыми у ординарных подводных лодок. Из описания процедур погружения-всплытия видно, что для этого не нужно никакого специального оборудования и не расходуется никакой энергии. Предложенная конструкция системы погружения-всплытия таким образом обладает исключительно высокой безопасностью: для того чтобы всплытие оказалось невозможным, надо по меньшей мере повредить прочный корпус до потери им плавучести. Наконец, наличие заполненных водой объемов между обтекателем и прочным корпусом ниже ватерлинии способствует остойчивости судна в подводном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2008 |
|
RU2384456C2 |
| Устройство для сбора плавающей нефти | 1983 |
|
SU1172991A1 |
| СИСТЕМА КОЛЛЕКТИВНОГО СПАСЕНИЯ ЭКИПАЖА С ПЛ-ТАНКЕРА В АВАРИЙНОМ ПОЛОЖЕНИИ ПРИ ЗНАЧИТЕЛЬНЫХ КРЕНЕ И ДИФФЕРЕНТЕ | 2000 |
|
RU2174088C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| СПОСОБ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА | 2017 |
|
RU2651415C1 |
| НАДВОДНО-ПОДВОДНОЕ ТРАНСПОРТНОЕ СУДНО | 1999 |
|
RU2149120C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ | 2017 |
|
RU2664971C1 |
| ПОДВОДНЫЙ ТАНКЕР | 2008 |
|
RU2380274C1 |
| НЕФТЕДОБЫВАЮЩАЯ ПОДВОДНАЯ ПЛАТФОРМА | 2011 |
|
RU2479458C1 |
Изобретение относится к кораблестроению и касается создания подводных аппаратов с регулированием глубины погружения с помощью крыльевых профилей. Подводный аппарат содержит прочный корпус с положительной плавучестью, снабженный по бортам в носовой и кормовой частях двумя парами крыльев, гидродинамический движитель и средство управления курсом. Прочный корпус со всех сторон окружен гидродинамическим обтекателем, проницаемым для воды ниже ватерлинии. Объем между обтекателем и прочным корпусом выше ватерлинии водонепроницаемыми стенками горизонтальной на уровне ватерлинии, вертикальной продольной и рядом вертикальных поперечных по верху прочного корпуса разделен на отсеки, которые имеют отверстия сверху и снизу по борту. Отверстия имеют открывающиеся крышки, а крылья выполнены полноповоротными. Крылья целесообразно выполнять с трапециевидной формой в плане и с двояковыпуклым профилем, составленным из кривых с монотонной производной и максимумом вблизи середины хорды. Ось вращения крыльев при этом может проходить через середины хорд. Технический результат реализации изобретения заключается в повышении эксплуатационных характеристик подводного аппарата. 1 з.п. ф-лы, 3 ил.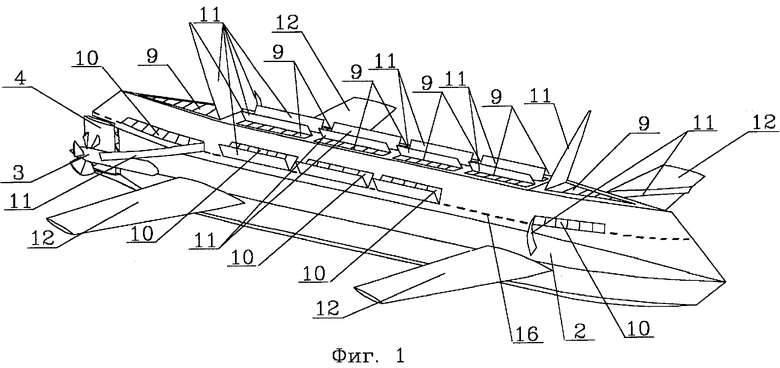
| US 5237952 A, 24.08.1993 | |||
| US 3429287 A, 25.02.1969 | |||
| Переходная площадка пассажирского вагона | 1986 |
|
SU1324901A1 |

