ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к судостроению, а конкретно к автономным необитаемым подводным аппаратам (АНПА), предназначенным для океанографических исследований.
Получение информации о гидрофизических характеристиках морской среды в различных акваториях Мирового океана предполагает использование широкого спектра измерительной аппаратуры. В качестве носителей такой аппаратуры часто выступают АНПА, осуществляющие по заданной программе сбор, первичную обработку, хранение и передачу информации. Временной и дистанционный ресурс работы АНПА ограничивается величиной заряда аккумуляторной батареи, являющейся, по существу, единственным источником энергии АНПА. При этом основным потребителем энергии выступает двигательная система, обеспечивающая перемещение аппарата в процессе сбора гидрофизической информации или при его переходе из одного района в другой.
Одним из путей экономии заряда аккумуляторных батарей у АНПА является применение так называемых подводных планеров (глайдеров), не имеющих в своем составе маршевых электродвигателей, а также винтовых или водометных движителей. Принцип работы глайдера основан на периодическом изменении плавучести, за счет чего аппарат поочередно то погружается в толщу вод, то поднимается к поверхности. При этом благодаря наличию наружных горизонтальных плоскостей (крыльев), а также механизму управления дифферентом, глайдер тонет и всплывает не вертикально, а по наклонной траектории, что придает его перемещению горизонтальный вектор. Такой принцип движения вперед обеспечивает большую экономию ходового ресурса по сравнению с применением гребных или водометных устройств. Главным недостатком глайдеров является низкая скорость перемещения в горизонтальной плоскости, как правило, не превышающая 1-2 м/с. Этот фактор сдерживает широкое применение глайдеров в тех случаях, когда решается задача обследования нескольких различных акваторий одним АНПА.
УРОВЕНЬ ТЕХНИКИ
Изобретение относится к автономным необитаемым подводным аппаратам планерного типа, не использующим для своего перемещения гребные или водометные движители.
В настоящее время существует целый ряд разработок в области глайдеров, причем многие из них реализованы на практике и показали свою работоспособность (см., например [1, 2, 3]). Одним из главных достоинств существующих глайдеров является низкое энергопотребление, благодаря чему время непрерывной работы аппаратов в автономном режиме исчисляется месяцами. Тем не менее, глайдерам присущи некоторые недостатки, главный из которых состоит в малой результирующей скорости горизонтального перемещения. Этот недостаток особенно существенен при переходе аппарата из одного водного района в другой. Поэтому задача повышения скорости движения глайдера при сохранении энергоресурса является актуальной.
Известно техническое решение (патент на изобретение RU №2490164), "ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ)", состоящее из корпуса, крыла из двух шарнирно присоединенных к корпусу консолей, киля и системы изменения углов атаки консолей, а также с электронными системами сбора и передачи информации, управления движением планера, регулирования плавучести и изменения дифферента и крена, расположенными внутри корпуса, отличающееся тем, что консоли установлены на оси вращения, проходящей за центром давления крыла, а система изменения углов атаки консолей выполнена саморегулируемой в зависимости от скорости и направления набегающего потока и включает систему механического ограничения диапазона изменения углов поворота консолей и связанные с ней упругие элементы, регулирующие пропорционально вращательному моменту величины углов атаки крыла и имеющие жесткость, обеспечивающую угол атаки крыла ноль градусов при нахождении планера в покое.
Данное устройство позволяет повысить автономность благодаря снижению лобового сопротивления среды движению аппарата, как следствие, экономии ходового ресурса, однако оно не увеличивает скорость перехода АНПА в назначенный район.
Известен АНПА (патент на изобретение RU №2669244), "Подводный планер-глайдер", включающий систему управления плавучестью, состоящую из балластных цистерн, распределительных электромагнитных клапанов, гидронасосов рабочей жидкости, размещенных в прочном корпусе подводного планера-глайдера, эластомерных емкостей, размещенных в проницаемой части подводного планера-глайдера, отличающийся тем, что система управления плавучестью разделена на два независимо работающих исполнительных тракта, расположенных симметрично относительно диаметральной плоскости подводного планера-глайдера, а эластомерные емкости выполнены с изменяемым объемом для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно диаметральной плоскости, с возможностью накренения и, соответственно, маневрирования подводного планера-глайдера по курсу.
Недостатком указанного технического решения является невозможность сокращения времени, необходимого для перехода глайдера в другой район для продолжения сбора гидрофизической информации.
Известно техническое решение (патент на изобретение RU №2680678) "СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА", включающее хвостовое оперение с гидродинамическими профилями, установленное на конце рычага первого рода, опорой которого является шаровой шарнир с как минимум одним цилиндрическим пальцем, расположенным на сфере опорного шарнира и закрепленным перпендикулярно относительно рычага, при этом опора рычага установлена на продольной оси аппарата в конечной точке кормы планера, а второй конец рычага снабжен подвижным телескопическим соединением и посредством дополнительного шарового шарнира закреплен на шатуне, конец которого шарнирно соединяет ползуны двух качающихся рамных кулис, осями качения которых являются валы сервоприводов, соединенных с электронным блоком управления и разнесенных по окружности на 90 градусов на плоскости, представляющей собой герметичную переборку кормового отсека, расположенную параллельно поперечному сечению корпуса планера. Система обеспечивает легкость управления глайдером в процессе его маневрирования по азимуту и глубине, но она не позволяет сократить время перехода АНПА из одного района работы в другой.
Известно техническое решение (патент на изобретение RU №2731590) "Планирующий подводный аппарат", включающее систему управления плавучестью, состоящую из балластных цистерн, распределительных электромагнитных клапанов, гидронасосов рабочей жидкости, размещенных в прочном корпусе планирующего подводного аппарата, эластомерных емкостей, размещенных в проницаемой части планирующего подводного аппарата, выполненных с изменяемым объемом для осуществления смещения точки приложения равнодействующей силы избыточной плавучести с возможностью накренения и, соответственно, маневрирования планирующего подводного аппарата по курсу, отличающийся тем, что система управления плавучестью разделена на четыре независимо работающих исполнительных тракта, расположенных симметрично относительно вертикальной оси планирующего подводного аппарата, а легкий корпус выполнен в виде сплющенной сферы. Данное техническое решение позволяет управлять маневрированием аппарата в горизонтальной плоскости, но не позволяет увеличить скорость его движения.
Известно техническое решение (патент на полезную модель RU №183537) "Автономный необитаемый надводно-подводный аппарат планирующего типа ГЛАЙДЕР-БОТ", которое содержит корпус, систему изменения плавучести, систему изменения дифферента, двигательно-движительную систему, систему энергопитания, а также системы управления, передачи данных, навигации, связи и контрольно-измерительную систему, отличающийся тем, что корпус аппарата выполнен в виде вытянутого в продольном направлении обтекаемого тела, днище которого снабжено скуловыми реданами, содержащими лыжу с горизонтальной полкой, а система изменения плавучести является двухзвенной и включает в себя модуль изменения плавучести, осушительную помпу и электроуправляемый клапан.
В аспекте предлагаемого изобретения данная полезная модель рассматривается как прототип.
Недостатком глайдера-бота, описанного в полезной модели №183537, является наличие двигательно-движительной системы, выступающей в качестве основного потребителя системы энергопитания. Это снижает автономность глайдера на этапе проведения океанографических исследований, поскольку ресурс аккумуляторных батарей будет в значительной степени израсходован при переходе в заданный район.
РЕШАЕМЫЕ ЗАДАЧИ
Задачи, решаемые при реализации предлагаемого изобретения, заключаются в сокращении времени перехода глайдера из одного района в другой при одновременной экономии запаса энергии бортовых источников питания.
Указанные задачи решаются за счет адаптации конструкции устройства к использованию силы ветра при нахождении глайдера в надводном положении.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В предлагаемом техническом решении сформулированы основные отличительные признаки устройства.
Автономный необитаемый подводно-надводный аппарат включает в свой состав обтекаемый корпус; крылья, шарнирно соединенные с корпусом; механизм изменения плавучести; механизмы управления креном и дифферентом; спутниковый навигационный блок; блок управления; блок сбора и передачи информации.
Корпус глайдера разделен на два отсека - кормовой (прочный), изолированный от внешнего пространства, и носовой (проницаемый), частично заполняемый забортной водой при погружении и освобождаемый от воды при всплытии глайдера.
Механизм изменения плавучести состоит из прочного резервуара, заполненного рабочей жидкостью (обычно минеральным маслом), жидкостного насоса, электромагнитного клапана и эластомерной емкости, способной менять свой объем при заполнении маслом или его вытеснении давлением забортной воды, проникающей в носовой отсек корпуса. Резервуар, насос и клапан расположены в пределах кормового отсека, а эластомерная емкость в носовом отсеке.
Механизм управления креном обеспечивает перемещение балласта вокруг продольной оси глайдера к одному из бортов. В качестве балласта используется блок аккумуляторных батарей, закрепленных на специальной каретке, которая поворачивается на нужный угол с помощью шагового электродвигателя. Масса балласта подбирается таковой, чтобы при смещении его к одному из бортов обеспечивалось опрокидывание глайдера на бок (крен достигает 90°).
Функции механизма изменения дифферента может выполнять механизм изменения плавучести, поскольку при заполнении носового отсека забортной водой глайдер не только приобретает отрицательную плавучесть, но и обеспечивает смещение центра тяжести аппарата вперед, создавая дифферент на нос. При вытеснении забортной воды из носового отсека рабочей жидкостью, расширяющей эластомерную емкость, носовая часть глайдера облегчается. Это создает положительную плавучесть аппарата и придает ему дифферент на корму.
При необходимости механизм управления дифферентом может быть реализован в виде отдельного устройства в виде каретки, перемещаемой вдоль продольной оси глайдера (см., например [ПМ №164034]).
Блок управления по заданной программе управляет работой глайдера, подавая в нужный момент команды на исполнительные механизмы, обеспечивающие погружение, всплытие, маневрирование по горизонту и пр. Навигационный блок, оснащенный спутниковым модулем (GPS или ГЛОНАСС), обеспечивает определение координат глайдера при его нахождении в надводном положении. Блок сбора и передачи информации с помощью гидрофизических датчиков производит измерение характеристик морской среды с заданной дискретностью, осуществляет запись и хранение полученных данных, в назначенные моменты времени передает результаты замеров на береговую или судовую станцию.
Отличительной особенностью предлагаемого технического решения является то, что крылья глайдера закреплены на шарнирах, обеспечивающих их вращение вдоль поперечной для глайдера оси на угол до 360°. Поворот крыла и установление его под нужным углом производится посредством сервопривода, подсоединенного к шарниру. На крыльях установлены метеодатчики, измеряющие силу и направление ветра над водной поверхностью. При всплытии глайдера и опрокидывании его на бок, один из указанных датчиков (находящийся над водой) передает результаты измерения в блок управления.
Реализация предлагаемого изобретения позволяет при всплытии глайдера на поверхность использовать одно из крыльев аппарата в качестве ветрового движителя (своеобразного паруса). При этом другое крыло, находящееся под водой, будет выполнять функцию руля, задающего нужное направление движения. Такое решение позволяет получить технический эффект - сокращение времени, необходимого глайдеру для перехода из одного района работы в другой. При этом, в отличие от других известных технических решений, глайдер не расходует энергоресурс, необходимый для питания двигательно-движительной системы.
Учитывая изложенное, можно сделать вывод, что заявленное техническое решение соответствует критерию "изобретательский уровень".
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
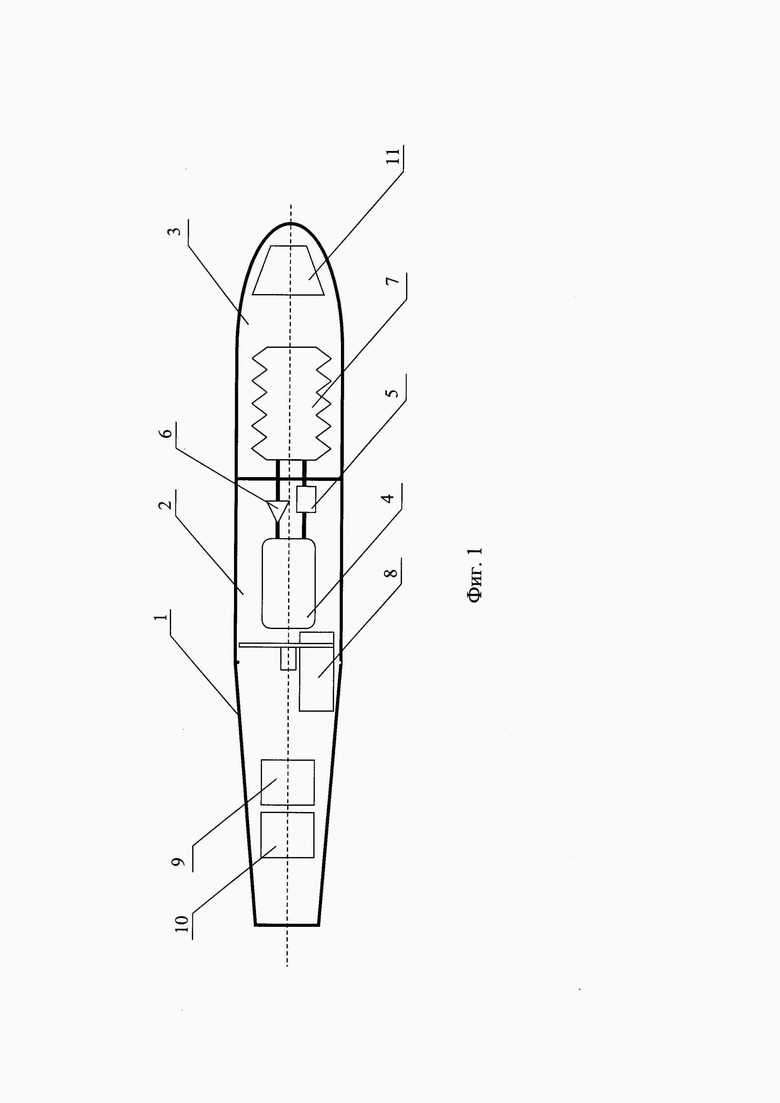
Изобретение иллюстрируется чертежами, (Фигура 1 - Фигура 2), где: Фигура 1 - отображает боковой вид аппарата в разрезе;
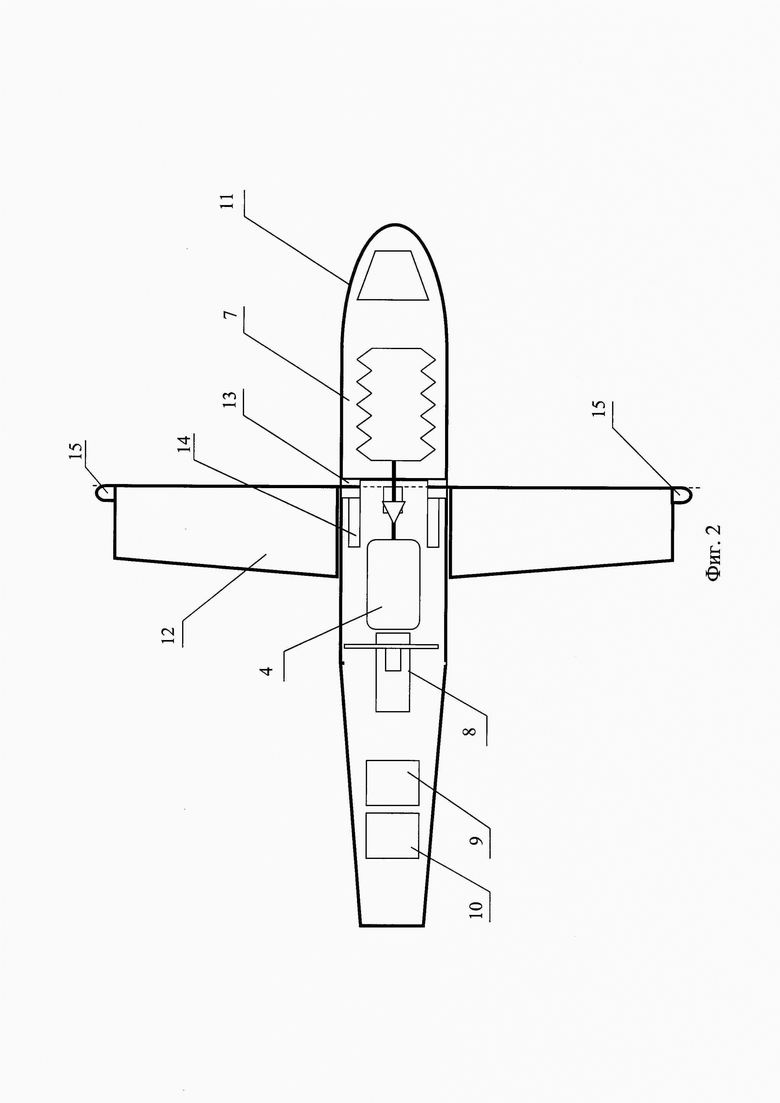
Фигура 2 - отображает вид сверху аппарата в разрезе.
1. Корпус глайдера.
2. Кормовой (прочный) отсек.
3. Носовой (проницаемый) отсек.
4. Резервуар с рабочей жидкостью.
5. Жидкостной насос.
6. Электромагнитный клапан.
7. Эластомерная емкость.
8. Механизм управления креном.
9. Блок управления.
10. Навигационный блок.
11. Блок сбора и передачи информации.
12. Крыло.
13. Шарнир крепления крыла.
14. Сервопривод.
15. Метеодатчик.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Автономный необитаемый подводно-надводный аппарат планерного типа (фиг. 1, фиг. 2) содержит: обтекаемый корпус 1, разделенный на два отсека - кормовой (прочный) 2 и носовой (проницаемый) 3. Аппарат оснащен механизмом изменения плавучести, в состав которого входят прочный резервуар 4, жидкостной насос 5, электромагнитный клапан 6 и эластомерная емкость 7, причем резервуар 4, насос 5 и клапан 6 размещены в пределах прочного отсека 2, а емкость 7 установлена в проницаемом отсеке 3. Механизм управления креном 8 находится в средней части аппарата и представляет собой балласт, перемещаемый вокруг продольной оси глайдера по дуге с помощью шагового электродвигателя. В качестве балласта выступает блок аккумуляторных батарей. Масса балласта подбирается такой, чтобы при повороте батарей в крайнее левое или крайнее правое положение относительно диаметральной плоскости глайдера, опрокидывающий момент был достаточным для накренения аппарата на 90°. В кормовом отсеке также размещены блок управления 9, навигационный блок 10, а в носовом отсеке - блок сбора и передачи информации 11. Крылья 12 прикреплены к корпусу 1 на шарнирах 13, благодаря чему имеют возможность вращения вокруг оси, проходящей через осевые линии шарниров 13. Управление поворотом крыльев и фиксация их в нужном положении осуществляется при помощи сервоприводов 14, соединенных с шарнирами 13. На концах крыльев 12 установлены метеодатчики 15, способные измерять силу и направление ветра и передавать результаты замеров в блок управления 9.
Устройство работает следующим образом.
Перед спуском аппарата на воду производится зарядка аккумуляторов и загрузка программы предстоящей работы в электронную память блока управления 9, а при необходимости - комплектация блока сбора и передачи информации набором необходимых гидрофизических датчиков (температуры, электропроводимости, давления и пр.). После проведения комплекса подготовительных работ аппарат спускается на поверхность воды и по команде с берегового или судового поста переходит в автономный режим работы. Согласно установленной в блоке управления 9 программе, глайдер принимает в носовой отсек забортную воду, приобретая отрицательную плавучесть и дифферент на нос. Происходит погружение глайдера, причем, благодаря наличию крыльев 12 траектория погружения имеет не отвесный, а наклонный вид. За счет этого глайдер приобретает горизонтальный вектор перемещения вперед. Контроль глубины погружения осуществляется при помощи датчика давления, входящего в состав приборной части блока 11.
По достижении заданной глубины блок управления 9 подает команду на включение насоса 5, который перекачивает рабочую жидкость из резервуара 4 в эластомерную емкость 7, которая при этом расширяется, вытесняя из носового отсека 3 забортную воду. Поскольку рабочая жидкость, заполняющая емкость 7, имеет меньшую плотность, чем морская вода, глайдер приобретает положительную плавучесть и дифферент на корму. Это приводит к всплытию глайдера к поверхности по наклонной траектории в направлении вперед и вверх. В процессе погружения и всплытия, блок сбора и передачи информации производит замеры гидрофизических характеристик водной среды и записывает результаты измерения в энергонезависимую память.
При достижении поверхности глайдер может определить или уточнить свои координаты с помощью глобальной системы позиционирования (ГЛОНАСС или GPS), используя для этого навигационный блок 10.
После этого циклы погружения/всплытия повторяются заданное число раз в соответствии с параметрами программы работ, заложенной в блоке управления.
При необходимости корректировка курса движения глайдера может осуществляться за счет создания крена посредством смещения балласта из нижнего положения по дуге на некоторый угол в сторону одного из бортов. В этом случае погружение или всплытие аппарата происходит со скольжением вправо или влево, что приводит к изменению курса.
По завершении комплекса работ в заданном районе, глайдер всплывает в надводное положение. По команде блока управления 9 механизм управления креном 8 перемещает балласт в крайнее левое или крайнее правое положение, благодаря чему глайдер опрокидывается на бок. Навигационный блок 10 определяет текущие координаты аппарата, а метеодатчик 15, находящийся в данный момент над водой, измеряет силу и направление ветра. Используя эти данные, блок управления рассчитывает курс для перехода в следующий район работ по программе исследований. Вслед за этим блок управления расчетным путем определяет необходимый угол установки обоих крыльев относительно направления ветра, таким образом, чтобы верхнее (в данный момент, надводное) крыло могло выполнять функцию паруса, а нижнее (подводное) крыло - функцию руля. С помощью сервоприводов 14 крылья 12 поворачиваются в рассчитанное положение и глайдер начинает переход в заданный район, используя для этого энергию ветра и не расходуя энергоресурс аккумуляторных батарей. При неблагоприятном (встречном или почти встречном) направлении ветра переход совершается галсами с периодическим изменением курса за счет перекладки руля и паруса (курс относительно ветра - бейдевинд).
По достижении заданного района глайдер уточняет свои координаты. Механизм управления креном 8 перемещает балласт в диаметральную плоскость, в результате чего аппарат возвращается в исходное (горизонтальное) состояние и начинает новый цикл работ в режиме погружение/всплытие.
Предлагаемое изобретение позволяет получить технический эффект - сокращение времени самостоятельного перехода глайдера в назначенный район работ без расхода энергоресурса на питание двигательно-движительной системы.
ИСТОЧНИКИ ИНФОРМАЦИИ:
1. Подводный глайдер "Морская тень". Инструмент для флота и для науки. Военное обозрение, 12.02.2019 {https://topwar. ru/153879-podvodnyj-glajder-morskaja-ten-instrument-dlja-flota-i-dlja-nauki. html).
2. Применение подводных глайдеров для геологоразведки. Новости АО "НПП ПТ "Океанос". (https://oceanos.ru/news/270).
3. Подводный робот для океанологических исследований "МАКО" (https://втopaяиндycmpuализация.pф/podvodnyj-robot).
| название | год | авторы | номер документа |
|---|---|---|---|
| Глайдер | 2023 |
|
RU2819541C1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ | 2017 |
|
RU2664971C1 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
Изобретение относится к автономным необитаемым подводным аппаратам (АНПА) планерного типа, предназначенным для океанографических исследований. Автономный необитаемый подводно-надводный аппарат планерного типа глайдер включает в себя корпус, крылья, шарнирно соединенные с корпусом, механизм изменения плавучести, механизмы управления креном и дифферентом, спутниковый навигационный блок, блок управления, блок сбора и передачи информации. Механизм управления креном в надводном положении обеспечивает опрокидывание аппарата на 90° относительно вертикали, а крылья снабжены сервоприводами, способными поворачивать их на 360° относительно поперечной оси аппарата. Крылья оснащены метеодатчиками, определяющими скорость и направление ветра. Достигается сокращение времени перехода автономного необитаемого подводно-надводного аппарата планерного типа глайдер в назначенный район работы при одновременной экономии бортового энергоресурса. 2 ил.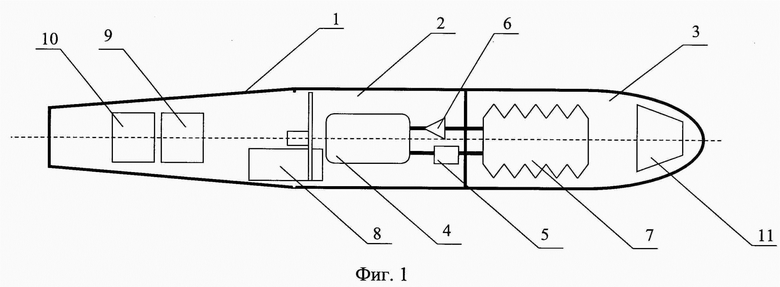
Автономный необитаемый подводно-надводный аппарат планерного типа (глайдер), включающий в свой состав корпус, крылья, шарнирно соединенные с корпусом, механизм изменения плавучести, механизмы управления креном и дифферентом, спутниковый навигационный блок, блок управления, блок сбора и передачи информации, отличающийся тем, что механизм управления креном в надводном положении обеспечивает опрокидывание аппарата на 90° относительно вертикали, а крылья снабжены сервоприводами, способными поворачивать их на 360° относительно поперечной оси аппарата, причем крылья оснащены метеодатчиками, определяющими скорость и направление ветра.
| ОДНОСЛОЙНАЯ ОБОЛОЧКА | 0 |
|
SU183537A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |
| JP 2007276609 A, 25.10.2007 | |||
| Оборудование к самоходному шасси для поверхностного внесения минеральных удобрений и погрузки их в кузов самосвальной тележки | 1958 |
|
SU122970A1 |
| Подводный планер с подвижным акустическим модулем | 2020 |
|
RU2751733C1 |
| 0 |
|
SU207065A1 | |

