Изобретение относится к области ультразвуковых неразрушающих испытаний материалов и изделий и может быть использовано, в частности, для контроля качества сортового проката, например прутков.
Известен ЭМАП, содержащий постоянные магниты и катушки индуктивности [1]. В известном ЭМАП повышение его чувствительности достигается за счет того, что он снабжен, по меньшей мере, тремя плоскими катушками индуктивности, тремя концентраторами из ферромагнитного материала и кольцевыми постоянными магнитами с чередующимися полюсами.
Недостатком известного ЭМАП являются большие потоки утечки и, как следствие, низкая чувствительность. В известном ЭМАП большая часть магнитного потока, создаваемого постоянными магнитами, проходит по воздуху. Проходимый магнитным потоком путь имеет значительное сопротивление, поэтому в рабочей зоне невозможно обеспечить требуемую индукцию.
Известен ЭМАП, содержащий корпус, крышку, подложку, а также магнитную систему, содержащую катушку индуктивности, по меньшей мере, два кольцевых постоянных магнита, плотно прилегающих друг к другу с расположением полюсов на наружной и внутренней боковой поверхности, один круглый постоянный магнит, смонтированный с одной стороны на их торцевой поверхности и обращенный к их внутренним полюсам одноименным полюсом и цилиндрический концентратор, выполненный из ферромагнитного материала, установленный на одной оси с круглым постоянным магнитом.
За счет создания единого внутреннего полюса в рабочей зоне известного ЭМАП достигается значительное повышение магнитной индукции и, как следствие, повышение чувствительности контроля.
К недостатку известного ЭМАП следует отнести узкую зону контроля, ограниченную 10-12 мм. Для сплошного контроля всей поверхности требуется несколько преобразователей, установленных по окружности, в несколько рядов, что значительно удорожает установку для дефектоскопии проката.
При расположении ЭМАП с возможностью вращения вокруг контролируемой поверхности прутка можно обойтись 2-4 преобразователями для перекрытия всей зоны контроля в одном сечении, однако это также повлечет за собой значительное удорожание установки.
Известен ЭМАП [2], принятый нами за прототип, в котором магнитная система выполнена в виде сердечника, окруженного со всех сторон, кроме рабочей, постоянными магнитами, направленными одноименными полюсами внутрь. Сердечник выполнен в виде набора пластин, изготовленных из электротехнической стали и разделен по оси симметрии прокладкой, выполняющей функцию электрической и акустической изоляции.
Кроме того, рабочая часть сердечника выполнена в виде правильной трапеции, меньшее основание которой направлено в сторону контролируемого прутка. Известный ЭМАП содержит две катушки индуктивности, одну для зондирования, другую для приема, разнесенные по горизонтальной оси для уменьшения электромагнитных помех.
Известный ЭМАП имеет следующие недостатки:
а) Высокая трудоемкость изготовления сердечника, при изготовлении которого применяются операции рубки, фрезерования и зачистки торцов пластин, изготовление прокладки, лакокрасочные работы.
б) Если сердечник окружен со всех сторон постоянными магнитами (кроме рабочей стороны), то в сечении он предполагается квадратным или прямоугольным, а не круглым. Это означает применение в магнитной системе нескольких прямоугольных магнитов по периметру, что сопряжено с возникновением в местах их стыка дополнительных участков магнитного сопротивления и значительных потоков рассеяния.
в) Прямоугольные магниты имеют более низкую суммарную магнитную энергию по сравнению с кольцевыми или круглыми магнитами.
г) Известный ЭМАП имеет узкую зону контроля. Для сплошного контроля требуется использование нескольких преобразователей, установленных в несколько рядов по ходу или механическая система вращения группы ЭМАП вокруг поверхности контролируемого прутка.
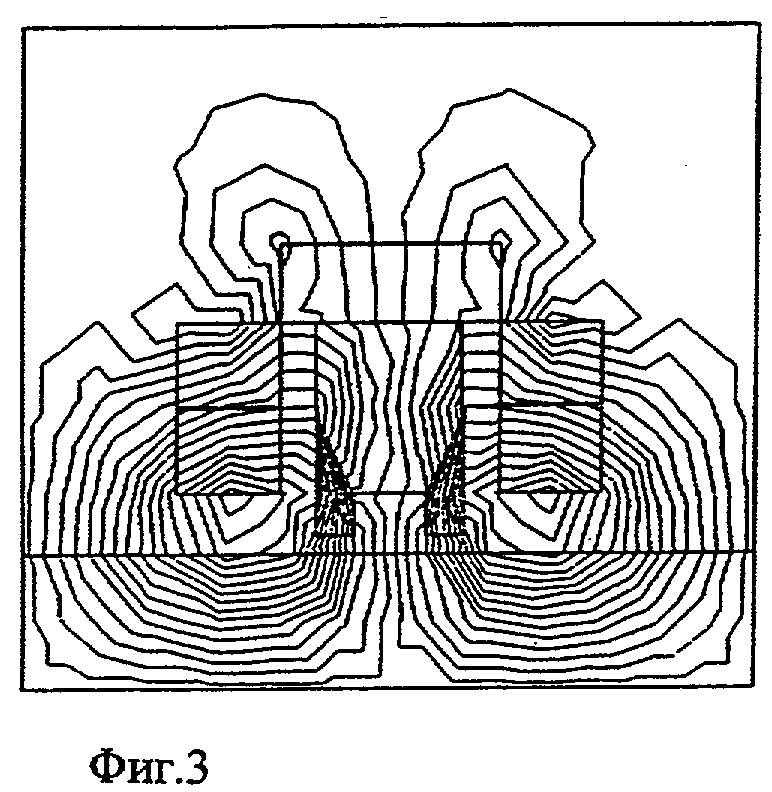
Анализ магнитных систем одноканальных ЭМАП (см. таблицу) показывает, что их применение при сплошном контроле экономически не выгодно, так как все они имеют один и тот же недостаток, а именно узкую зону контроля. Чтобы перекрыть всю поверхность объекта контроля, как было показано выше, требуется большое количество преобразователей и сложные перемещения ЭМАП относительно объекта контроля.
Задачей изобретения является создание преобразователя с широкой полосой контроля и высокой чувствительностью, при небольших габаритах, что позволит создавать более экономичные и эффективные установки УЗК.
Для этого предлагаемый электромагнитно-акустический преобразователь, содержащий корпус, магнитную систему, концентраторы и катушки индуктивности, выполнен многоканальным с радиальным расположением катушек индуктивности относительно поверхности объекта контроля, например, прутка, с возможностью его пропуска через электромагнитно-акустический преобразователь, магнитная система выполнена, по меньшей мере, из трех постоянных кольцевых магнитов или электромагнитов-соленоидов, заключенных в цилиндрический корпус из немагнитного материала и обращенных одноименными полюсами к поверхности объекта контроля, на внутренней поверхности постоянных кольцевых магнитов или электромагнитов-соленоидов установлена переходная втулка из немагнитного материала, в которой равномерно по окружности выполнены сквозные пазы, а на внутренней поверхности переходной втулки, в плоскости симметрии среднего постоянного кольцевого магнита или электромагнита-соленоида и сквозных пазов, установлено керамическое кольцо, выполненное, например, из отдельных сегментов, равномерно расположенных по окружности в пазах переходной втулки, на которых размещены катушки индуктивности и концентраторы.
Кроме того, между внутренней поверхностью постоянных кольцевых магнитов или электромагнитов-соленоидов и наружной поверхностью переходной втулки установлена прокладка из электропроводного материала, например фольги.
Пространство между концентраторами и катушками индуктивности залито компаундом.
Концентраторы выполнены из порошка карбонильного железа, пропитанного компаундом, например эпоксидным клеем.
Переходная втулка с пазами в сборе с керамическим кольцом и постоянные кольцевые магниты или электромагниты-соленоиды, для исключения взаимных смещений, размещены между фланцами, закрепленными на противоположных торцах цилиндрического корпуса.
Постоянные кольцевые магниты выполнены цельными или в виде сегментов, скрепленных бандажами.
Каждая катушка индуктивности снабжена индивидуальной системой коммутации в виде проводов, уложенных в каналах, выполненных в переходной втулке с пазами и имеющих общий вывод через разъем.
Предлагаемый многоканальный ЭМАП обладает большими преимуществами перед одноканальными преобразователями. При незначительных габаритах он обеспечивает широкую зону контроля, заменяя от четырех до десяти и более, одноканальных ЭМАП, которые не могут быть совмещены в одной плоскости по конструктивным соображениям.
Кроме того, предлагаемый ЭМАП с кольцевыми постоянными магнитами или электромагнитами-соленоидами обладает большей чувствительностью по сравнению с известными, так как практически весь магнитный поток, генерируемый магнитами, концентрируется в рабочей зоне катушек индуктивности.
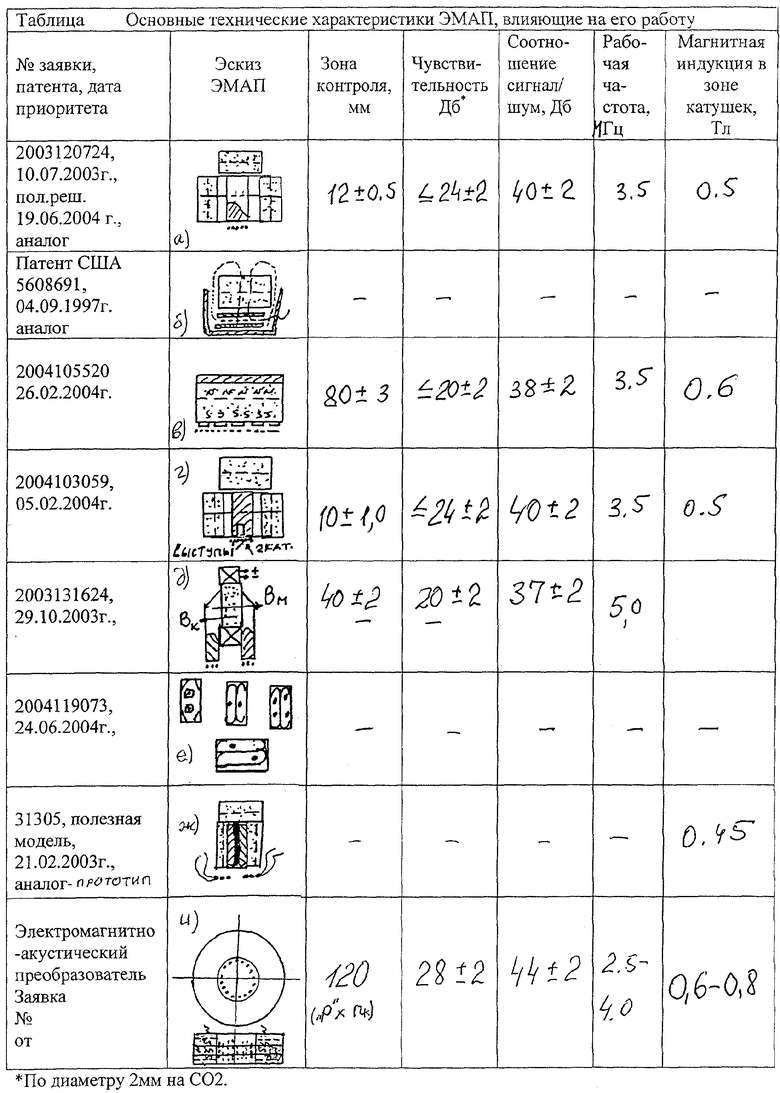
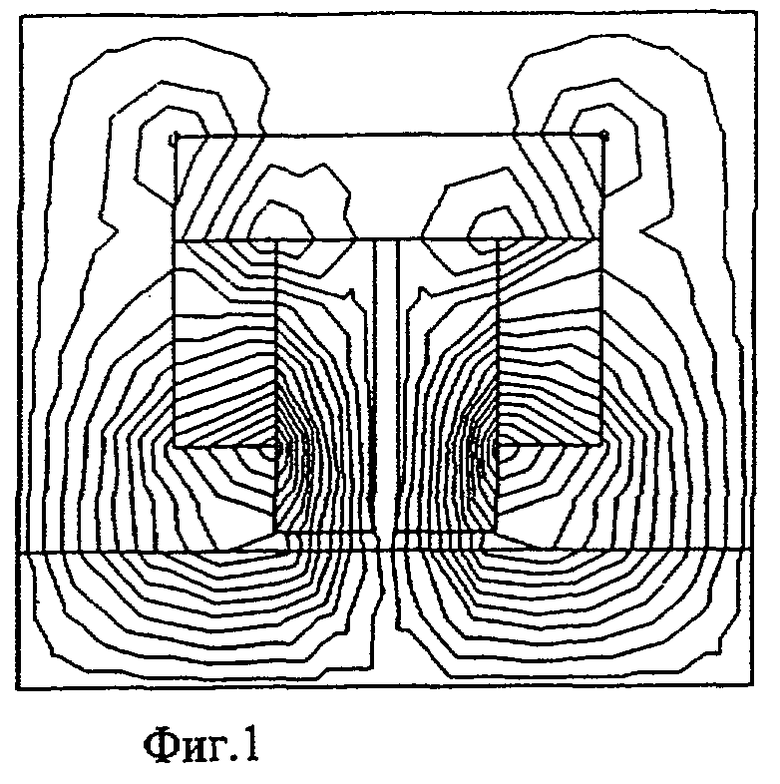
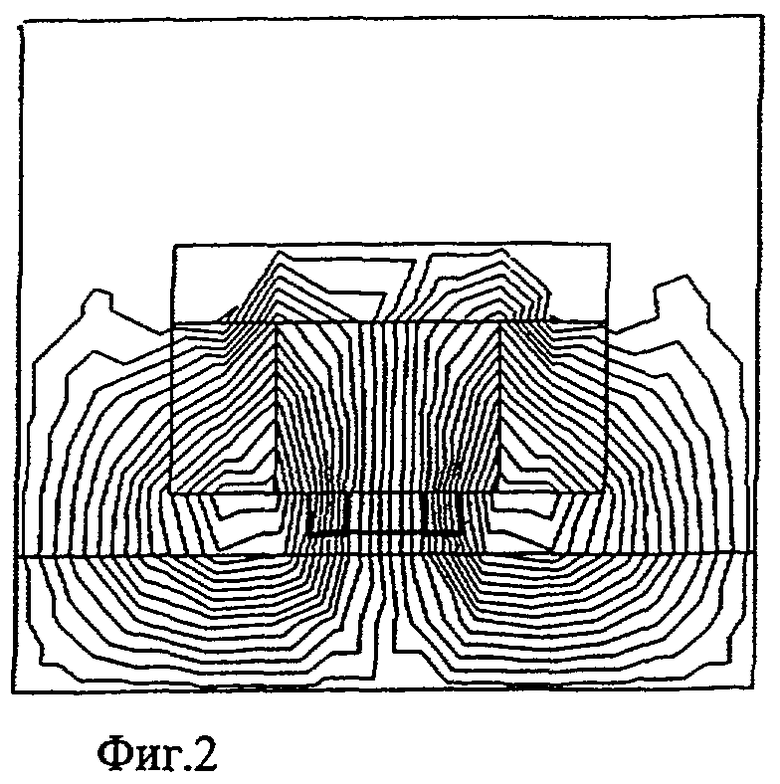
На фиг.1 - фиг.6 показаны картины распределения магнитных полей различных типов ЭМАП, полученные путем моделирования.
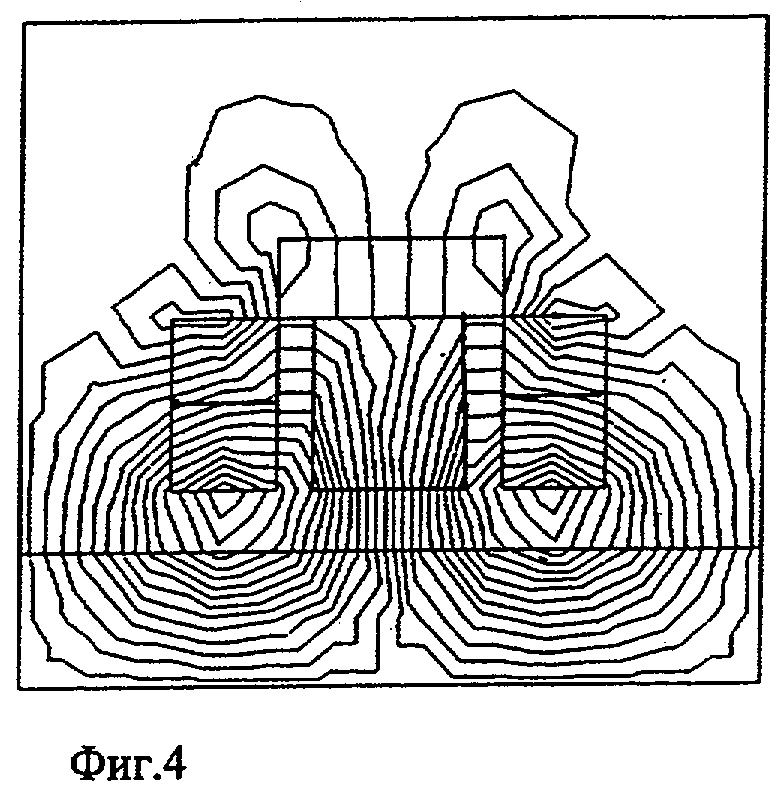
На фиг.1, фиг.3, фиг.4, показано распределение магнитных полей одноканальных ЭМАП.
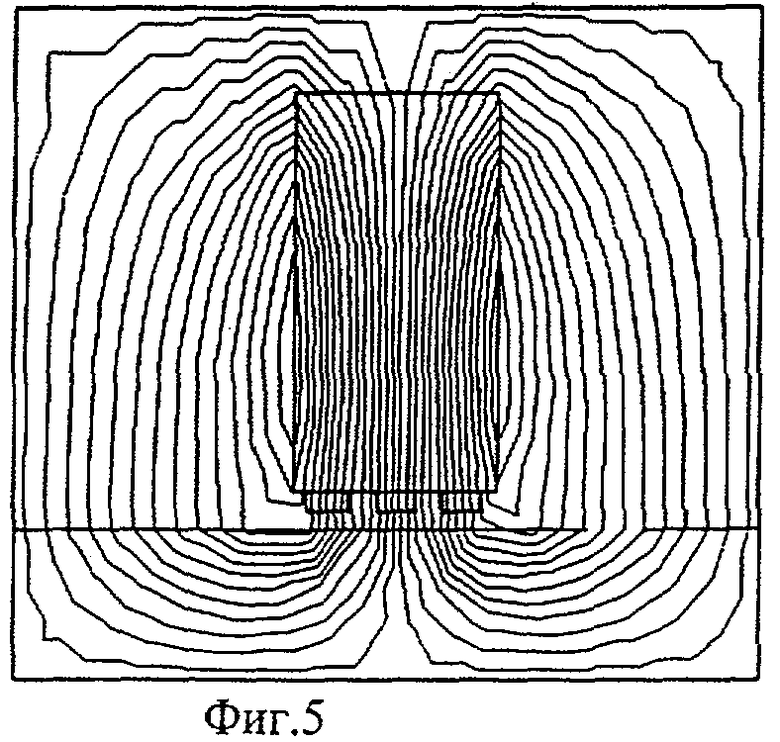
На фиг.5 - четырехканального ЭМАП.
На фиг.2 показано распределение магнитного поля многоканального плоского ЭМАП.
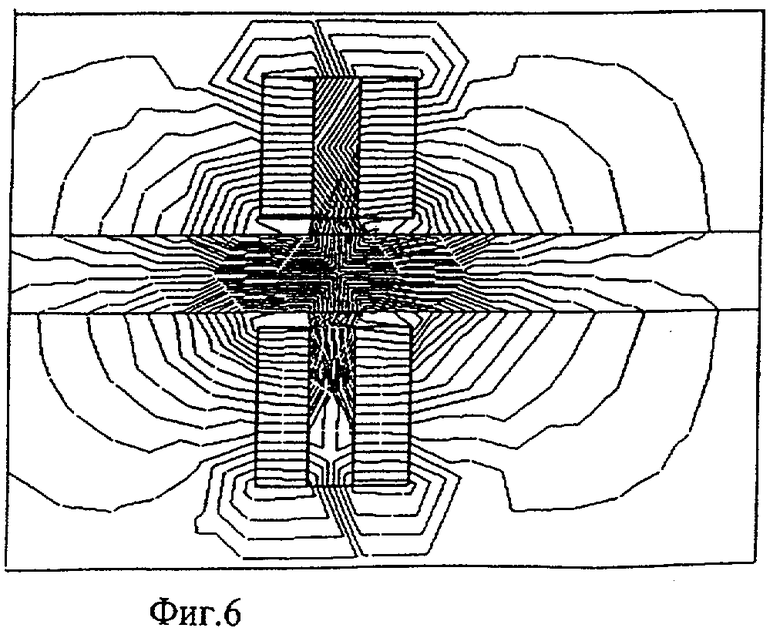
На фиг.6 показано распределение магнитных полей предлагаемого многоканального ЭМАП с радиальным расположением катушек индуктивности и магнитной системой из постоянных магнитов.
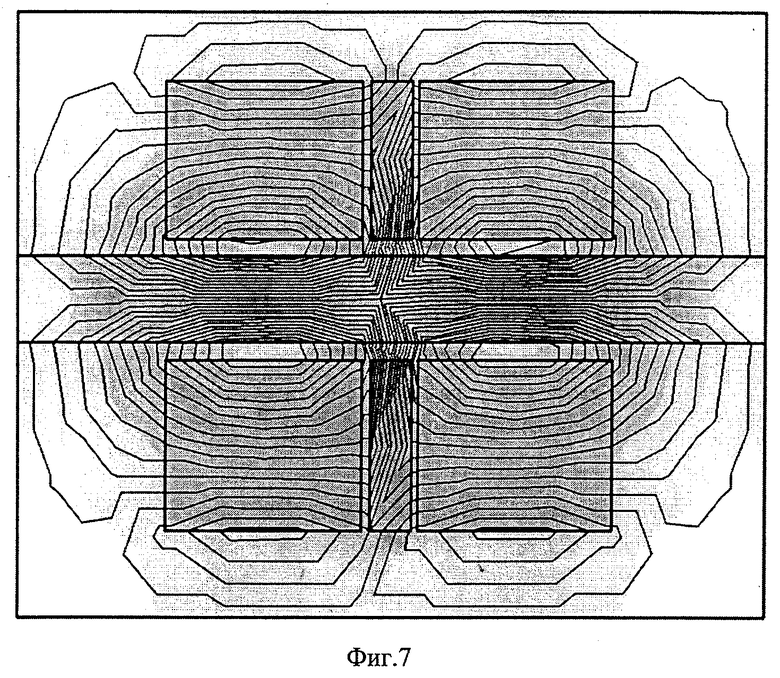
На фиг.7 показано распределение магнитных полей предлагаемого ЭМАП с радиальным расположением катушек индуктивности и магнитной системой из электромагнитов-соленоидов.
В таблице, приведенной в конце описания, даны основные характеристики известных ЭМАП и предлагаемого.
Данные таблицы и анализ распределения и плотности магнитных полей в рабочей зоне "Р" показывают значительные преимущества предлагаемого ЭМАП перед существующими по чувствительности: 28 дБ против 24 дБ и по величине зоны контроля: 120 мм против 12 мм при равных габаритах.
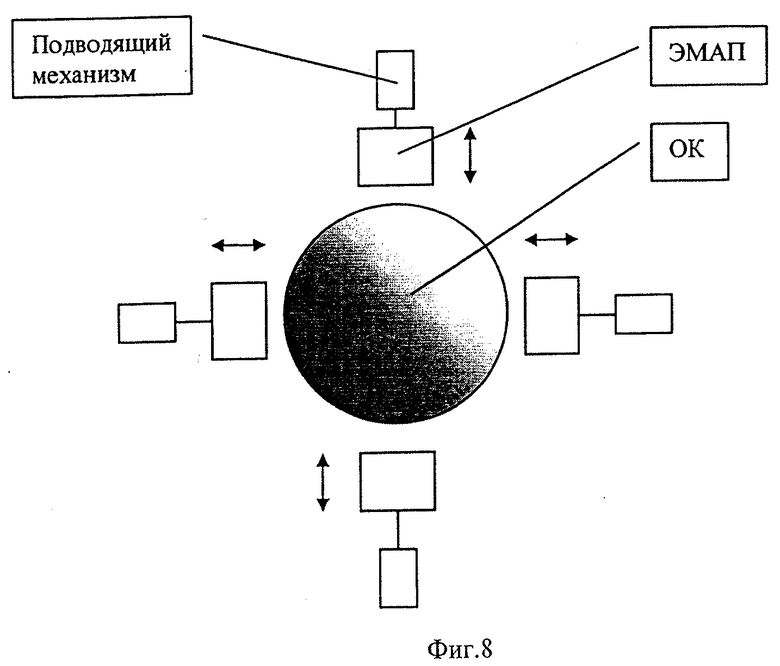
Еще одним преимуществом предлагаемого ЭМАП является отсутствие при контроле прутков в составе установки УЗК следящих механизмов (фиг.8), применение которых необходимо для подвода ЭМАП к поверхности прутка при контроле и отвода ЭМАП от поверхности прутка при окончании контроля.
В предлагаемом ЭМАП контролируемый пруток проходит внутри преобразователя соответствующего диаметра D и при настройке на новый диаметр прутка заменяется на другой, при этом отпадает необходимость каждый раз подводить и отводить ЭМАП при прохождении через него очередного прутка. Переналадка осуществляется быстро и всего один раз.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Рисунки в таблице:
рис.а) - поперечное сечение одноканального преобразователя (ЭМАП) с двумя кольцевыми и одним круглым постоянными магнитами и ферромагнитным концентратором;
рис.б) - поперечное сечение преобразователя (ЭМАП) с магнитом и электростатическим экраном;
рис.в) - поперечное сечение плоского многоканального преобразователя (ЭМАП) с постоянным магнитом и ферромагнитными концентраторами;
рис.г) - поперечное сечение двухканального преобразователя (ЭМАП) с двумя кольцевыми, одним круглым постоянными магнитами и концентратором с двумя выступами;
рис.д) - поперечное сечение двухканального (ЭМАП) с одним постоянным магнитом марки Ni-Fe-B и размагничивающей катушкой. Катушка насажена на магнит. При включении катушки ее магнитное поле "запирает" поле магнита. Если в процессе контроля на полюсах магнитопроводов-концентраторов скопилась окалина, в момент подачи тока в катушку окалина отпадет от полюсов. Это предотвращает повреждение ЭМАП;
рис.е) - представлены различные конфигурации катушек индуктивности ЭМАП;
рис.ж) - поперечное сечение двухканального преобразователя (ЭМАП) со всех сторон окруженного постоянными магнитами с концентратором из набора пластин из электротехнической стали, разделенным на две половины электроизолирующей прокладкой;
рис.и) - вид спереди и поперечное сечение многоканального преобразователя с радиальным расположением катушек индуктивности, одним средним и двумя крайними постоянными кольцевыми магнитами, одноименными полюсами обращенными к поверхности объекта контроля, например прутка.
Рисунки на фигурах:
фиг.1 - картина распределения магнитного поля ЭМАП, изображенного на рис.ж), принятого за прототип;
фиг.2 - картина распределения магнитного поля ЭМАП, изображенного на рис.в);
фиг.3 - картина распределения магнитного поля ЭМАП, изображенного на рис.г);
фиг.4 - картина распределения магнитного поля ЭМАП, изображенного на рис.а);
фиг.5 - картина распределения магнитного поля четырехканального ЭМАП по патенту РФ №2219539;
фиг.6 - картина распределения магнитного поля предлагаемого многоканального ЭМАП с кольцевыми магнитами и радиальным расположением катушек индуктивности, изображенного на рис.и);
фиг.7 - картина распределения магнитного поля предлагаемого многоканального ЭМАП с электромагнитными катушками-соленоидами и радиальным расположением катушек индуктивности;
фиг.8 - схема расположения группы одноканальных ЭМАП с механизмами подвода и отвода преобразователей от поверхности объекта контроля (ОК);
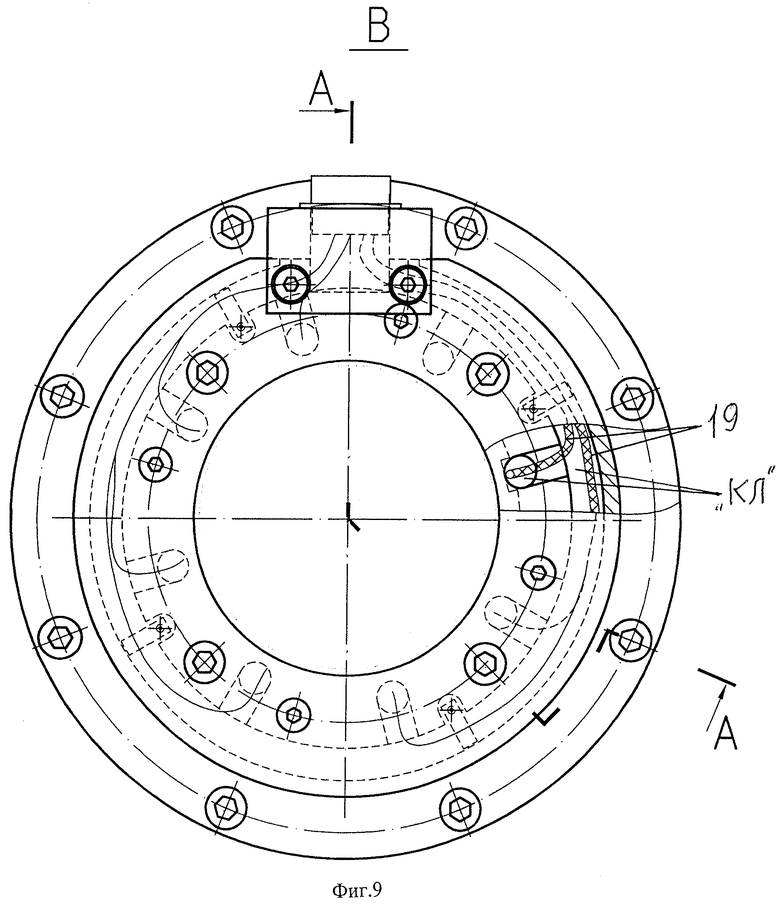
фиг.9 - вид В на предлагаемый многоканальный электромагнитно-акустический преобразователь (ЭМАП) с местным вырезом, на котором показаны каналы для проведения проводов от катушек индуктивности до разъема;
фиг.10 - поперечный разрез А-А (на фиг.9) предлагаемого ЭМАП;
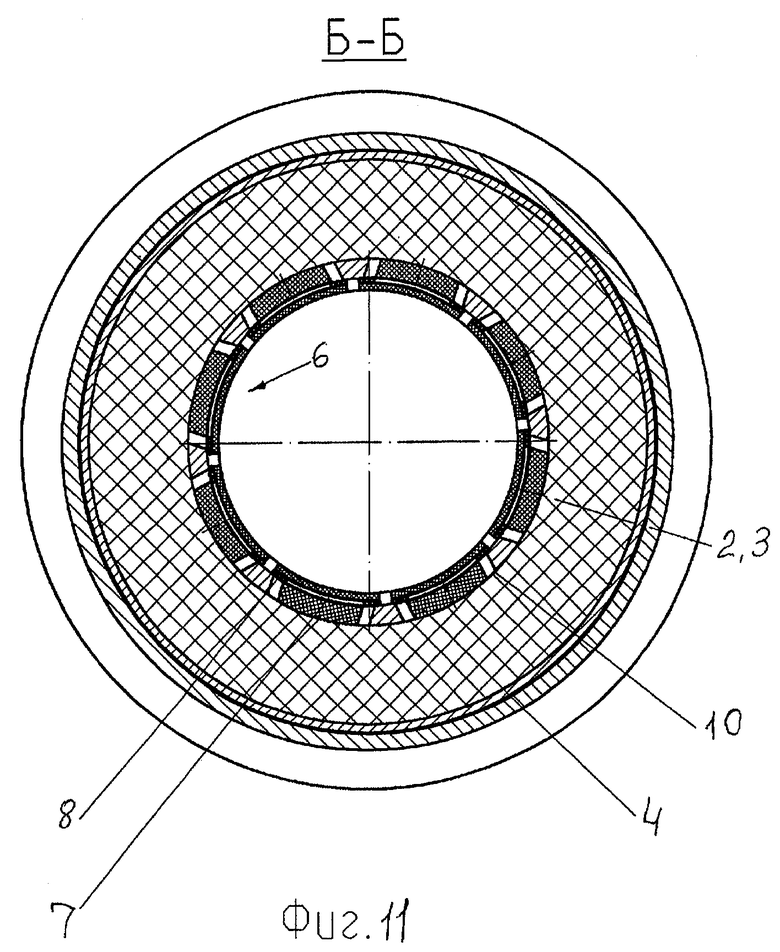
фиг.11 - радиальный разрез Б-Б (на фиг.10) предлагаемого ЭМАП со схемой расположения катушек индуктивности по диаметру D;
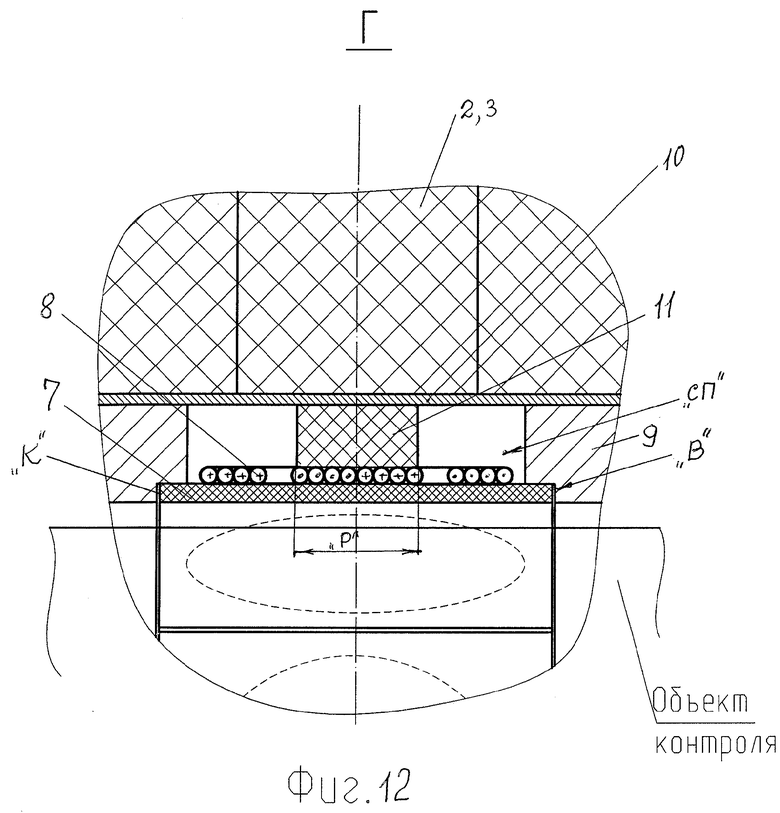
фиг.12 - выноска Г элементов ЭМАП (на фиг.10) с указанием рабочей зоны "Р" катушки индуктивности.
На фиг.9 - фиг.12 показан пример выполнения предлагаемого многоканального ЭМАП для ультразвукового контроля прутка диаметром 95 мм с 8 катушками индуктивности и суммарной зоной контроля 120 мм по окружности, что составляет 40% по окружности прутка:
"РΣ"="Р"·nк=15 мм ·8=120 мм, где "Р" - рабочая зона одной катушки индуктивности, nк - число катушек.
Для ультразвукового контроля прутков других диаметров могут быть изготовлены ЭМАП аналогичной конструкции, но с другим количеством и размерами катушек индуктивности и магнитов или электромагнитных катушек-соленоидов.
ОПИСАНИЕ КОНСТРУКЦИИ ПРЕДЛАГАЕМОГО МНОГОКАНАЛЬНОГО ЭМАП С РАДИАЛЬНЫМ РАСПОЛОЖЕНИЕМ КАТУШЕК ИНДУКТИВНОСТИ (фиг.9-фиг.12)
Магнитная система ЭМАП 1 состоит, по меньшей мере, из трех постоянных кольцевых магнитов 2, например, марки Ni-Fe-B или электромагнитов-соленоидов 3. При выполнении ЭМАП 1 на постоянных магнитах 2 в виде сегментов они заключаются в бандажи 4 из немагнитного материала.
Постоянные магниты 2 или электромагниты-соленоиды 3 установлены, вплотную друг к другу, в цилиндрический корпус 5 из немагнитного материала с возможностью пропуска через них объекта контроля, например прутка.
В плоскости симметрии (фиг.11, сечение Б-Б) среднего постоянного магнита 2 или электромагнита-соленоида 3 установлено керамическое кольцо 6, выполненное в виде сегментов 7, равномерно расположенных по окружности кольца 6.
На сегменты 7 наклеены катушки индуктивности 8.
Кольцо 6 удерживается в цилиндрическом корпусе 5 с помощью переходной втулки 9, в которой равномерно по окружности выполнены сквозные пазы "СП".
С внутренней стороны переходной втулки 9 сквозные пазы "СП" имеют выточки "В", в которые по контуру "К" вклеены сегменты 7. Для исключения возникновения в материале постоянных кольцевых магнитов 2 или электромагнитов-соленоидов 3 вихревых токов, влияющих на качество работы ЭМАП, между внутренней поверхностью постоянных кольцевых магнитов 2 или электромагнитов-соленоидов 3 проложена электропроводная прокладка 10, например, из фольги.
На поверхность катушек индуктивности 8 наклеены концентраторы 11, вплотную прилегающие к внутренней поверхности постоянных кольцевых магнитов 2 или электромагнитов-соленоидов 3.
С торцов переходная втулка 9 в сборе с керамическим кольцом 6 зафиксирована фланцами 12, 13, 14, 15, 16, закрепленными на корпусе 5 при помощи болтов 17, 18, выполненными из немагнитного материала.
Для вывода проводов 19 от катушек 8 через сквозные пазы "СП" в переходной втулке 9 выполнены каналы "КЛ". Для вывода проводов 19 пучком из ЭМАП предусмотрен разъем 20, размещенный в корпусе 21.
Как видно на фиг.11, при радиальном расположении катушек индуктивности 8 на внутренней поверхности постоянных кольцевых магнитов 2 или электромагнитов-соленоидов 3 относительно поверхности объекта контроля достигается практически 100% контроль объекта контроля, чего невозможно достичь при помощи известных одноканальных или многоканальных ЭМАП, обеспечивающих небольшие зоны контроля (см. таблицу). В случае необходимости обеспечения 100% контроля с запасом по ходу контроля может быть установлен дополнительно еще один ЭМАП, аналогичный предложенному, с небольшим разворотом относительно друг друга.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2219539.
2. Патент РФ №31305 (полезная модель).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2447430C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2219539C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2300762C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2237892C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2243550C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2223487C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2265208C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2295125C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2300763C1 |
Использование: для ультразвукового контроля продукции металлургического производства, в частности цилиндрических изделий, например прутков. Сущность: заключается в том, что электромагнитно-акустический преобразователь выполнен многоканальным с радиальным расположением катушек индуктивности относительно поверхности объекта контроля, магнитная система выполнена, по меньшей мере, из трех постоянных кольцевых магнитов или электромагнитов-соленоидов, заключенных в цилиндрический корпус из немагнитного материала и обращенных одноименными полюсами к поверхности объекта контроля, на внутренней поверхности постоянных кольцевых магнитов или электромагнитов-соленоидов установлена переходная втулка из немагнитного материала, в которой равномерно по окружности выполнены сквозные пазы, а на внутренней поверхности переходной втулки, в плоскости симметрии среднего постоянного кольцевого магнита или электромагнита-соленоида и сквозных пазов, установлено керамическое кольцо, выполненное, например, из отдельных сегментов, равномерно расположенных по окружности в пазах переходной втулки, на которых размещены катушки индуктивности и концентраторы. Технический результат: создание преобразователя с широкой полосой контроля и высокой чувствительностью. 6 з.п. ф-лы, 1 табл., 12 ил.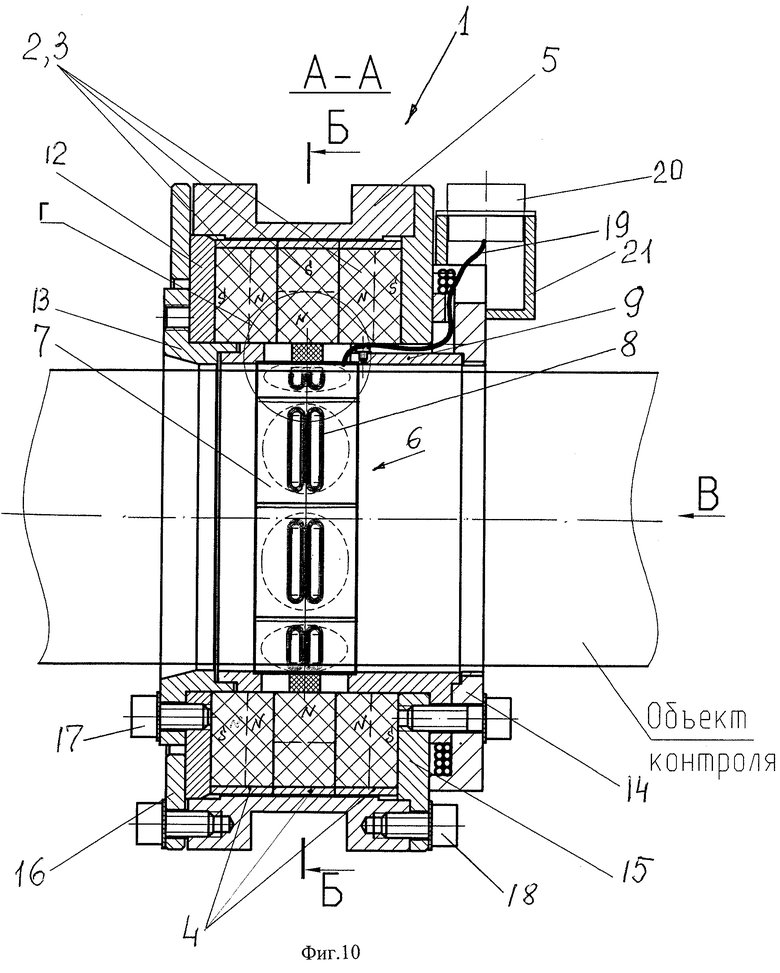
| Электромагнитно-акустический преобразователь | 1974 |
|
SU488624A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 0 |
|
SU380364A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2219539C1 |
| 0 |
|
SU240986A1 | |
| US 6170336 B1, 09.01.2001. | |||

