Изобретение относится к области неразрушающего контроля и может быть использовано для обнаружения дефектов и определения геометрических размеров изделий и образцов из электропроводящего материала бесконтактным способом путем электромагнитно-акустического возбуждения/приема ультразвуковых колебаний на значительных скоростях сканирования.
Наиболее ярким и масштабным примером контроля изделий на значительных (до 80 км/ч и более) скоростях является неразрушающий контроль железнодорожных рельсов, уложенных в путь. Поэтому пояснение принципа действия и примера реализации заявляемого технического решения приводится на примере контроля рельсов с целью обнаружения в них дефектов заводского и эксплуатационного характера. Как будет показано ниже, область применения предлагаемого изобретения не ограничивается контролем рельсов и может быть использована при контроле других длинномерных изделий промышленности (труб, балок, листовых полос и т.п.).
Для неразрушающего контроля рельсов используются не только ручные приборы и дефектоскопные тележки, но и автоматизированные вагоны и автомотрисы дефектоскопные (мобильные средства дефектоскопии), позволяющие производить скоростной контроль рельсов по всему сечению (исключая перья подошвы рельсов). Преимущественно для контроля головки рельсов используют магнитный (магнитодинамический (МД)) и контактный ультразвуковой (УЗ) методы контроля, а для обнаружения дефектов шейки и подошвы рельса - ультразвуковой метод также при контактном вводе акустических колебаний [1, 2, 3].
Основным недостатком контактного метода ввода УЗ колебаний является необходимость применения большого объема контактирующей жидкости (чистая вода или вода с присадками) - до 5 т на 200-250 км контролируемого пути, сложности реализации контроля в зимних условиях (замерзание жидкости, налипание снега на мокрые акустические блоки и их обледенение) и, как следствие, нарушение акустического контакта и низкая достоверность контроля. Кроме того, необходимость периодической заправки мобильного средства контактирующей жидкостью удорожает контроль и снижает производительность диагностики рельсов.
В связи с этим реализация бесконтактного ввода УЗ колебаний, по достоверности и скорости контроля не уступающая контактному способу ввода/приема УЗ колебаний, является актуальной.
Из всех известных методов реализации бесконтактного контроля рельсов (лазерное возбуждение и прием УЗ колебаний, контроль с помощью нормальных волн на значительные расстояния и др.) наиболее перспективным и реализуемым является использование бесконтактных электромагнитно-акустических (ЭМА) преобразователей, обладающих рядом существенных преимуществ перед традиционным контактным методом с использованием пьезопреобразователей (ПЭП). К ним относятся [4]:
- отсутствие необходимости применения контактирующих жидкостей;
- возможность контроля рельсов без специальной подготовки поверхностей;
- возможность возбуждения и приема любых типов волн, в том числе поперечных с горизонтальной поляризацией, а также вводимых по нормали к поверхности катания рельса;
- отсутствие износа преобразователей;
- возможность контроля в широком диапазоне температур, в том числе при аномально низких (до минус 50°С) температурах;
- возможность контроля при больших скоростях движения ЭМА преобразователей и изделия.
Несмотря на то, что теоретически возможен как нормальный, так и наклонный ввод УЗ колебаний, при применении ЭМА преобразователя, осуществляющего ввод и прием ультразвука в направлении, перпендикулярном к поверхности, ЭМА преобразователь имеет определенные преимущества перед традиционными способами с контактным вводом УЗ колебаний с помощью традиционных пьезопластин (ПЭП), обусловленные следующим. ПЭП позволяет возбуждать и принимать по нормали к поверхности металла только продольные колебания, а ЭМАП (в зависимости от конструкции) - как продольные, так и поперечные. В последнем случае возбуждение и прием поперечных волн, распространяющихся по нормали к поверхности, особенно эффективно может быть осуществлено при контроле ферромагнитных материалов. Установлены следующие преимущества, обусловленные применением поперечных волн, возбуждаемых нормально к поверхности изделия [5]:
- увеличивается чувствительность контроля, уменьшается величина «мертвой» зоны и разрешающая способность, повышается точность измерения координат дефектов и толщины изделия. Это обусловлено тем, что скорость распространения поперечных волн в материалах почти в 2 раза меньше скорости продольных волн;
- поперечная волна лучше отражается от плоских дефектов, заполненных газом, жидкостью или сыпучим веществом, так как такого рода несплошности плохо передают сдвиговые напряжения;
- поперечная волна при правильном выборе направления поляризации не испытывает существенной трансформаций при отражениях от дефекта и поверхности контролируемого изделия. Это дает возможность уменьшить влияние на результаты контроля когерентных акустических помех;
- амплитуда импульсов сдвиговых колебаний, возбуждаемых прямым ЭМА преобразователем, ослабляется в изделии с плоскими трещинами, ориентированными перпендикулярно поверхности контролируемого изделия, в большей степени, чем амплитуда продольных колебаний, возбуждаемых прямым ПЭП. Это создает предпосылки для успешного обнаружения неблагоприятно ориентированных плоскостных дефектов;
- в сравнении с продольной, поперечная волна испытывает меньшее затухание в материале.
Измерения посредством ЭМА преобразователя характеризуются малой величиной погрешности и стабильностью сигнала на скорости в силу того, что отсутствует прохождение сигнала через большое число промежуточных сред (в случае контактного пьезоэлектрического преобразователя УЗ волна возбуждается в пьезопластине, затем проходит через призму с определенным углом, затем через протектор, затем через контактную среду и только потом входит в объект контроля).
Можно выделить два основных элемента конструкции ЭМА преобразователя:
- магнитная система, состоящая из магнита (набора магнитов или электромагнита) и магнитопровода, формирующая поле намагничивания;
- индуктор, как правило, представляющий собой эллиптическую (или любой другой конфигурации) плоскую катушку индуктивности (или несколько катушек).
Эффективность ЭМА-преобразования напрямую зависит от величины подмагничивающего поля, создаваемого намагничивающей системой ЭМА-преобразователя. Из [6] известно, что эффективность ЭМА преобразователей в совмещенном режиме (излучение - прием) пропорциональна квадрату величины поля подмагничивания В. При этом достаточно намагнитить только скин-слой ферромагнетика, обусловленный высокочастотным электромагнитным полем, который создается первичными ЭМА преобразователями - катушками индуктора. Именно в скин-слое ферромагнетика происходит взаимное преобразование высокочастотных электромагнитных и акустических колебаний. Другими словами, эффективность ЭМА-преобразования зависит от намагничивающей системы и создаваемого ею магнитного поля в скин-слое контролируемого материала.
Для создания больших полей используют намагничивающие системы, представляющие собой массивные сборки из постоянных магнитов. Установлено, что подмагничивающее поле сильно зависит от зазора между намагничивающей системой и поверхностью контролируемого ферромагнетика [6].
Известен [5] ЭМА преобразователь для возбуждения сдвиговых (поперечных) УЗ объемных волн с применением постоянных магнитов, содержащий магнит в форме цилиндра с направлением намагничивания вдоль оси, на торце которого расположена катушка индуктора ЭМА преобразователя. Указанный ЭМА преобразователь не обеспечивает необходимой чувствительности и имеет низкое отношение сигнал/шум.
Известен [7] ЭМА преобразователь, в котором магнитная система выполнена в виде концентратора из материала с высокой намагниченностью насыщения, на каждой нерабочей поверхности которого установлен высокоэнергичный магнит (на основе сплава NdFeB или SmCo), а катушка индуктора расположена на рабочей поверхности концентратора. Указанный ЭМА преобразователь не обеспечивает необходимой чувствительности и имеет низкое отношение сигнал/шум при контроле изделий.
Известен [8] ЭМА преобразователь, отличающийся от вышеизложенных тем, что в него введены концентратор из магнитомягкого материала, дополнительный магнит, полюсный наконечник, магнитопровод и вставка из немагнитного металла, при этом концентратор установлен на торцевой части магнита, дополнительный магнит выполнен с направлением намагничивания по нормали к боковым граням концентратора и с обеспечением одинаковой полярности всех примыкающих к концентратору полюсов. Такая магнитная система ЭМА преобразователя позволяет расширить функциональные возможности (наряду с возбуждением сдвиговых волн с радиальной поляризацией обеспечивается возбуждение сдвиговых волн с линейной поляризацией и продольных волн, а также их одновременное возбуждение). Указанная магнитная система ЭМА преобразователя требует наличия воздушного зазора между поверхностью контролируемого изделия и концентратором, не позволяет реализовать бесконтактный контроль рельсов на значительных скоростях сканирования и обладает ограниченными функциональными возможностями.
Все рассмотренные ЭМА преобразователи [4-8] требуют сохранения постоянного зазора между рабочей плоскостью намагничивающей системы и поверхностью контролируемого изделия. Возможность попадания в указанный зазор посторонних металлических предметов и повреждения системы делает небезопасным проведение дефектоскопических работ. В зоне болтовых стыков и стрелочных переводов хрупкие постоянные магниты могут быстро выйти из строя и стать определенной помехой для безопасного движения поездов. Несмотря на применение высокоэнергичных магнитов, создаваемое ими магнитное поле недостаточно для эффективного бесконтактного возбуждения/приема УЗ колебаний, особенно при скоростном контроле рельсов.
Наиболее близким к заявляемому устройству является электромагнитный акустический преобразователь изделий и образцов из электропроводящего материала по патенту [9] №2489713 немецкой фирмы «Институт др. Ферстер ГМБХ КО», содержащий узел намагничивания контролируемого изделия и узел зонда (индуктора) с катушками индуктивности, размещенный в области магнитного поля с возможностью перемещения относительно намагничивающего узла. Преимуществом известного устройства является выполнение узла намагничивания и узла индуктора (узел зонда) с определенной степенью свободы между собой. Узел индуктора, имея незначительную массу и постоянно находясь в магнитном поле узла намагничивания, вследствие отсутствия жесткой связи с намагничивающим узлом, при проходе неровностей поверхности может без затруднений следовать рельефу поверхности, не вызывая возникновения чрезмерных инерционных сил, которые могли бы привести к износу или даже разрушению преобразователя. При этом сильное магнитное притяжение между намагничивающим узлом и контролируемым ферромагнитным изделием не влияет (или влияет очень мало) на ту силу, которая прижимает узел индуктора к поверхности изделия. Благодаря этому, как заявляют авторы известного патента, контроль ферромагнитного материала может осуществляться с высокой чувствительностью и малой нагрузкой износа при сохранении скользящего контакта между узлом индуктора и поверхностью контролируемого изделия.
Недостатком известного устройства, принятого за прототип, является использование в качестве узла намагничивания системы, состоящей из постоянных магнитов (или электромагнита), расположенной над узлом индуктора на определенном (несколько - до 8 мм) расстоянии. Необходимость соблюдения этого расстояния обуславливает применения сложной конструкции взаимного крепления узлов и специальных защитных мер по сохранению этого зазора. При нарушении условия сохранения зазора между узлом намагничивания и узлом индукторов, все недостатки аналогов проявляются в полной мере - наблюдается быстрый износ и возможность повреждения индукторных катушек ЭМА преобразователя. Все это ограничивает функциональные возможности известного устройства и делает невозможным применение известного устройства при значительных скоростях сканирования.
Задачей, решаемой заявляемым техническим решением, является расширение функциональных возможностей электромагнитно-акустического преобразователя для контроля изделий и образцов при значительных скоростях сканирования.
Для решения поставленной задачи электромагнитно-акустический преобразователь для ультразвукового контроля изделий из электропроводящего материала, содержащий узел намагничивания контролируемого изделия и узел индуктора с катушками индуктивности для создания переменного электромагнитного поля ультразвуковой частоты, размещенный в области магнитного поля с возможностью перемещения относительно намагничивающего узла, согласно заявляемому изобретению узел намагничивания выполнен в виде двуосной тележки, соленоиды электромагнита размещены на осях колесных пар, а полюсами электромагнита служат колеса колесных пар тележки, катушки индуктивности индуктора армированы в герметичную гибкую оболочку из износостойкого электроизолирующего материала и размещены на минимально возможном расстоянии от пятна контакта колеса тележки с контролируемым изделием.
Существенными отличиями заявляемого устройства по сравнению с прототипом являются следующие признаки:
1. Выполнение узла намагничивания в виде двуосной тележки с соленоидами (намагничивающими катушками) на осях колесных пар и использованием колес в качестве полюсов электромагнитов обеспечивает создание стабильного магнитного потока в контролируемом изделии. В прототипе, несмотря на применение ограничивающих пластин, эта величина переменная, что ухудшает качество контроля.
2. Нулевой зазор между полюсами магнита (колесами) и поверхностью контролируемого изделия также способствует повышению не только стабильности потока, но и, при прочих равных условиях, к увеличению потока в изделии (в скин слое металла изделия), а значит, и к повышению эффективности возбуждения/приема ультразвуковых колебаний.
3. Для полюсов электромагнита, являющихся колесами тележки, неровности на поверхности контролируемого изделия даже значительной величины (на практике «ступеньки» на болтовых стыках рельсов до 10 мм) не являются препятствием, приводящим к ограничению контроля или к повреждению элементов ЭМА преобразователя. В прототипе, столкновение неровности поверхности контролируемого изделия с защитными элементами (распорный элемент, полозья) ЭМА преобразователя может привести к нарушению функционирования устройства.
4. Выполнение узла намагничивания в виде двуосной тележки с размещением коаксиально на осях колесных пар соленоидами (намагничивающими катушками) или постоянными магнитами позволяет создавать значительный магнитный поток в контролируемом изделии, что также способствует повышению эффективности ЭМА преобразования.
5. Система намагничивания одновременно является и носителем ЭМА преобразователя, что в отличие от прототипа существенно упрощает конструкцию устройства.
6. Армирование катушек индуктивности индуктора в герметичную оболочку из износостойкого материала упрощает конструкцию индуктора, защищает катушки от загрязнения и повреждения в реальных условиях эксплуатации и позволяет максимально приблизить катушки индуктивности к поверхности контролируемого изделия, что повышает эффективность ЭМА преобразования. В прототипе грязенепроницаемая оболочка (сильфон) в основном защищает промежуточное пространство между полюсом магнита и катушками индуктора и плохо защищает сами катушки, являющиеся основными элементами ЭМА преобразователя.
Заявляемое устройство иллюстрируют следующие графические материалы:
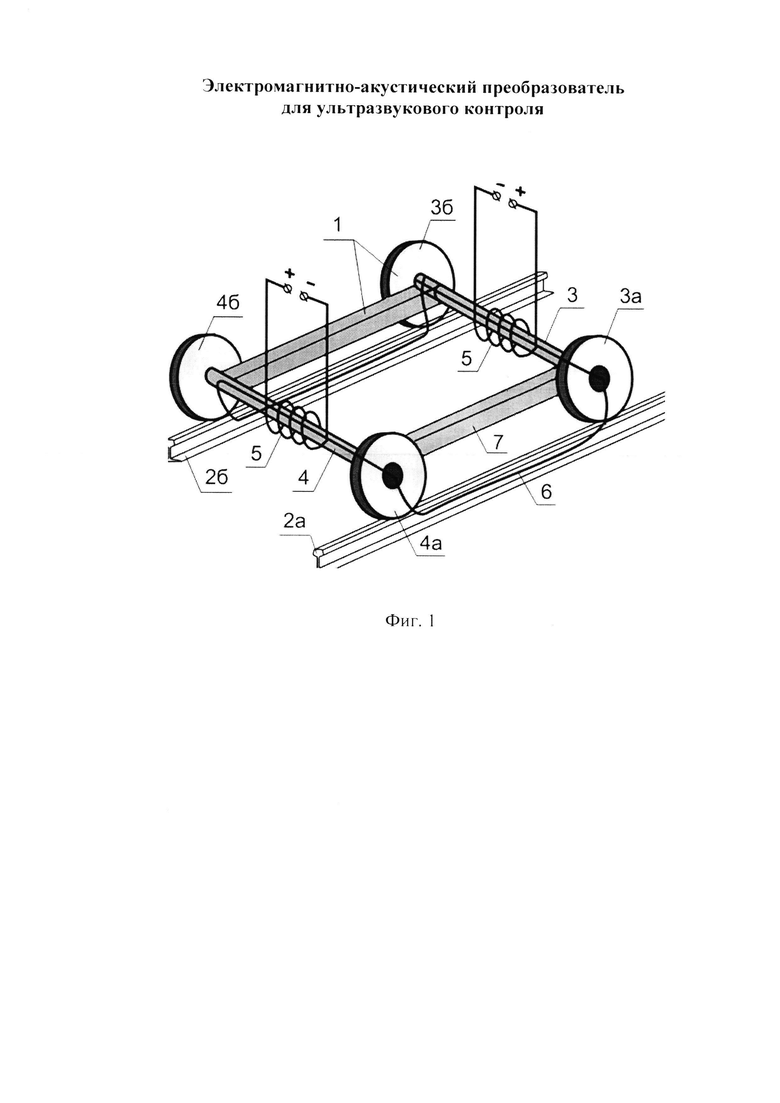
Фиг. 1 - Схема возбуждения магнитного потока, где:
1 - тележка с двумя колесными парами;
2а и 2б - рельсовая колея с рельсами 2а и 2б;
3 и 4 - колесные пары с колесами 3а и 3б для колесной пары 3 и колесами 4а и 4б для пары 4 соответственно;
5 - катушки (соленоиды) электромагнитов на осях колесных пар 3 и 4;
6 - магнитный поток, создаваемый электромагнитами на осях колесных пар, замыкающийся через колеса тележки и участков рельсов между колесами тележки 1;
7 - рама тележки 1, выполненная из немагнитного материала.
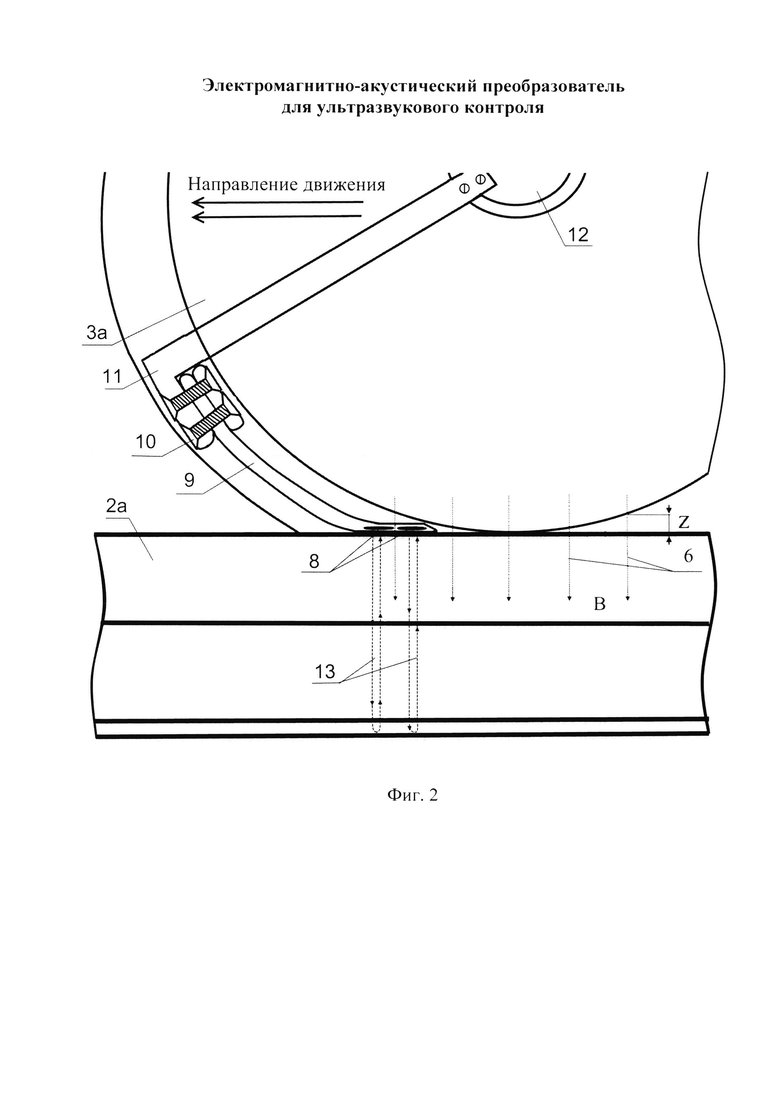
Фиг. 2 - ЭМА преобразователь с размещением узла индуктора под колесом (например, 3а колесной пары 3) тележки 1, где:
8 - катушки индуктора ЭМАП;
9 - ласта - упругий элемент для герметичного размещения катушек индуктора ЭМА преобразователя;
10 - узел крепления;
11 - кронштейн, прикрепляемый к буксе 12;
12 - буксовый узел колесной пары 1;
13 - УЗ колебания, возбуждаемые в рельсе.
Рассмотрим возможность и особенности реализации заявляемого устройства.
Тележку 1 с двумя колесными парами 3 и 4 (Фиг. 1) устанавливают на рельсовую колею с рельсами 2а и 2б. На осях 3 и 4 колесных пар расположены соленоиды (катушки намагничивания) 5. Оси 3 и 4 совместно с катушками 5 образуют своеобразные электромагниты. При подключении электрического напряжения к катушкам 5 образуется замкнутый магнитный поток 6, без воздушных зазоров и соответствующих потерь. Обмотки катушек 5 подключаются к источнику электрического напряжения согласованно так, чтобы магнитный поток 6 проходил по пути: ось 3 первой колесной пары - колесо 3а - пятно контакта колеса с рельсом 2а, рельс 2а (одной нитки рельсовой колеи) - пятно контакта колеса 4а второй колесной пары 4 - ось 4 другой колесной пары - другое колесо 4б этой пары - рельс 2б другой нитки рельсовой колеи и колесо 3б первой пары.
Связывающие конструктивные элементы 7 тележки 1, с целью исключения потерь магнитного потока, выполняют из немагнитного материала (например, из нержавеющей стали). Такая система намагничивания позволяет получить в рельсе магнитную индукцию не менее 1 Тл при расходуемой электрической мощности всего около 2 кВт. Система безопасна при значительных скоростях сканирования (испытана при контроле рельсов до 80 км/ч) на эксплуатируемых железнодорожных путях при проезде любых участков пути с болтовыми и сварными стыками, стрелочными переводами, участков рельсового пути с автомобильными переездами и мостов [10, 11].
Такая система намагничивания успешно эксплуатируется при реализации магнитодинамического (МД) метода контроля, известна из патентов и публикаций [12-17] и подтверждает реализуемость предлагаемого технического решения.
Однако МД метод позволяет обнаруживать только дефекты в головке рельсов, залегающие на глубине, не превышающей 15-20 мм от поверхности катания рельса. Известные технические решения создают магнитное поле на участках рельсов между колесами для реализации магнитного (магнито-динамического) контроля и предназначены в основном для обнаружения дефектов в головке рельсов и поперечных изломов в рельсах. Некоторые технические решения позволяют дополнительно, по сигналам МД метода определять скорость контроля, используя корреляционную обработку сигналов от двух близко распложенных датчиков магнитного поля [16], или анализировать состояние сварных стыков рельсов [17]. В известном техническом решении [15] создаваемое магнитное поле кроме обнаружения поперечных трещин в рельсах используют также и для создания тормозных усилий подвижного состава.
Но все известные рассмотренные и аналогичные методы намагничивания имеют узкую область применения и не позволяют реализовать бесконтактное (сухое, без применения контактирующей жидкости) возбуждение и прием упругих (акустических) колебаний УЗ частоты и имеют ограниченную функциональную возможность. Имеются примеры одновременного применения МД и УЗ методов, когда одновременно с реализацией МД метода осуществляют и УЗ метод контроля [3, 13, 18]. Однако при этом используются контактные УЗ преобразователи со всеми их недостатками (требование контактирующей жидкости для создания акустического контакта, нестабильность контакта в процессе сканирования и т.д.). Размещение контактных УЗ преобразователей в известных решениях связано лишь использованием специальной тележки с электромагнитами на осях колесных пар в качестве носителя или устройства для размещения контактных акустических блоков при сканировании контролируемого изделия.
С целью расширения функциональных возможностей в заявляемом изобретении предлагается магнитный поток, создаваемой рассмотренной системой намагничивания, использовать для бесконтактного (сухого, без контактирующей жидкости) контроля рельсов путем ЭМА возбуждения /приема УЗ колебаний. Для этого в зоне максимального магнитного потока, вблизи контактного пятна колеса с рельсом, устанавливают плоскую катушку индуктивности 8 индуктора с переменным электрическим током УЗ частоты. Катушка или несколько катушек 8 индуктора герметично вмонтированы (армированы) в эластичную ласту 9, которая в свою очередь с помощью узла крепления 10 прикреплена к кронштейну 11. Кронштейн 11 прикрепляется к буксовому узлу 12 колесной пары 3.
При включении соленоидов 5, в осях колесных пар 3 и 4 создается магнитный поток 6, который через полюса электромагнита (колеса тележки 3а, 4а, 4б и 3б) проникает в исследуемые рельсы 2а и 2б. Магнитный поток 6 проходит в рельс через пятна контакта колесо-рельс и через воздушный зазор между ободом колеса и рельсом. Путем математического моделирования и экспериментально установлено, что:
- размеры пятна контакта составляют около 60×40 мм, здесь магнитная индукция максимальная и составляет около 2,0 Тл;
- на расстоянии около 80 мм (77,5 мм) от краев контактного пятна в воздушном зазоре Z между колесом и рельсом (Фиг. 2) уровень магнитной индукции В находится еще на уровне, достаточном для эффективного возбуждения и приема УЗ колебаний ЭМА методом.
В указанном зазоре Z (Фиг. 2) в заявляемом устройстве размещается катушка индуктивности 8 индуктора ЭМА преобразователя, представляющая собой плоскую катушку в форме меандра, «бабочки» или иной формы (конфигурация катушки в предмет заявляемого технического решения не входит). Силовые линии, создаваемые электромагнитом в рассматриваемой зоне, практически перпендикулярны катушке индуктора и поверхности катания рельса. Импульсный ток УЗ частоты, протекающий в плоской катушке 8 индуктора, вызывает колебания этих проводников и поверхностного слоя контролируемого изделия (рельса 2а или 2б) с одинаковой максимальной амплитудой, т.е. в данном преобразователе энергия магнитного поля используется практически полностью. При этом обеспечивается равномерность фронта УЗ колебаний в скин-слое, что в совокупности приводит к увеличению коэффициента преобразования преобразователя и к созданию объемных сдвиговых волн 13 в контролируемом рельсе 2а (или 2б). Ультразвуковые колебания, распространяясь по траектории 13 по высоте рельса, фиксируют эхо- и/или зеркально-теневым методами УЗ контроля искомые дефекты в рельсе.
В зависимости от реализуемых схем прозвучивания контролируемого изделия (рельса 2а, 2б), в зазоре между ободом колеса и поверхностью катания рельса могут находиться один, два или несколько катушек 8 индуктора (на Фиг. 2 показано две катушки). При одиночной катушке индуктора он одновременно (точнее, последовательно: вначале излучает зондирующий импульс, потом принимает эхо-сигналы) выполняет роль излучателя и приемника УЗ колебаний.
То, какого вида ультразвуковые волны (по частоте и ориентации) будут созданы в материале контролируемого изделия, зависит от направления созданного магнитной системой тележки магнитного поля, а также от компоновки катушек индуктора, их расстояния от пятна контакта и электронной системы (на Фиг. не показана).
Следует отметить, что формирование сдвиговых УЗ колебаний, распространяющихся нормально к поверхности сканирования, менее критично к технологическому зазору между плоской катушкой индуктора 8 и поверхностью контролируемого объекта (рельса 2а или 2б). А технологический зазор неизбежен, т.к. катушки 8 индуктора должны быть защищены от повреждений, замыкания витков и т.п. Поэтому, в заявляемом техническом решении предлагается разместить их в упругую герметичную эластичную пластину (ласту) 9, которая может быть выполнена, например, из износостойкого полиуретана или из других высокостойких к истиранию немагнитных материалов. При оптимальном подборе материала ласты технологический зазор может составлять не более 1,5 мм, что вполне достаточно для получения до 10 донных сигналов (от поверхности подошвы рельса) в статическом положении тележки и до 3-донных сигналов в динамике на максимальных скоростях сканирования. Это позволяет осуществлять уверенный бесконтактный (при сухом контакте) УЗ контроль рельсов на значительных скоростях сканирования.
Конкретное выполнение кронштейна 11 и узла крепления 10 могут отличаться от показанного варианта на Фиг. 2. Важно, чтобы обеспечивалось постоянное положение катушек 8 индуктора относительно поверхности контролируемого рельса и пятна контакта колеса с рельсом. При перемещении ласта 9 с катушками индуктора 8 может следовать рельефу поверхности контролируемого изделия 2а и 2б. При этом зона индуктора, как правило, слегка прижимается упругими силами гибкой ласты и, при определенных условиях, силами инерции к поверхности контролируемого изделия (к поверхности катания рельса), однако сила этого прижима так мала, что даже при скользящем контакте рабочей поверхности ласты 9 и поверхностью катания рельса имеет место лишь небольшой износ. Можно также в отдельных фазах процесса работать бесконтактно.
Для защиты катушек 8 индуктора перед индуктором со стороны, обращенной к контролируемому изделию, а также со стороны колеса можно дополнительно установить не показанные на Фиг. защитные пластины из немагнитного материала (например, из керамического композита). Узел крепления 10 должен быть выполнен таким образом, чтобы при необходимости обеспечить быструю замену изношенной или поврежденной ласты 9 с катушками 8 индуктора на работоспособную.
Для формирования УЗ волн, ориентированных нормально к поверхности сканирования, необходимо обеспечить возможно близкое расположение индуктора к пятну контакта. Именно при выполнение данного требования обеспечивается наиболее эффективное возбуждение сдвиговых УЗ волн в указанном на Фиг. 2 направлении 13.
В общем случае, размещение катушек 8 индуктора на каждой нитке рельсовой колеи возможно как впереди, так и сзади колеса (3а на Фиг. 2). Экспериментально установлено, что наиболее эффективное возбуждение УЗ колебаний происходит при размещении индукторов вблизи первых по ходу движения тележки 1 колес (колес 3а и 3б на Фиг. 1, при указанном на Фиг. 2 направлении движения тележки).
Реализация заявляемого устройства возможна не только при контроле железнодорожных рельсов, но и любых других изделий, имеющих параллельное расположение контролируемых узлов. Например, возможен одновременный контроль двух рядом расположенных труб, тавровых балок, узких листовых полотен и т.п. Естественно, при этом профиль образующей колес тележки должен быть адаптирован под профиль контролируемого изделия, ширина тележки определяется расстоянием между изделиями, а контролируемые изделия не должны иметь между собой поперечные связи из магнитомягкого материала.
Возможна также реализация устройства, при котором обеспечивается контроль одиночного длинномерного изделия, а второй, размещенный параллельно первому, служит направляющей для тележки. Производительность контроля при этом будет в два раза ниже, чем при одновременном контроле двух идентичных изделий.
В то же время, в любом рассмотренном случае становиться возможным существенно упростить конструкцию и заметно расширить функциональную возможность ЭМА преобразователя за счет повышения скоростей сканирования без потери эффективности возбуждения/приема ультразвуковых колебаний бесконтактным способом.
Таким образом, заявляемое устройство может быть реализовано, позволяет реализовать бесконтактный ультразвуковой контроль изделий на значительных скоростях сканирования существенно расширяя функциональные возможности ЭМА преобразователя.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Гурвич А.К., Довнар Б.П., Козлов В.Б., Круг Г.А., Кузьмина Л.И., Матвеев А.И.; под ред. Гурвича А.К. Неразрушающий контроль рельсов при их эксплуатации и ремонте. - М.: Транспорт, 1983. - 318 с.
2. Марков А.А., Шпагин Д.А. Ультразвуковая дефектоскопия рельсов, 2 изд. перераб и доп. - СПб, Образование - Культура, 2008. - 283 с.
3. Марков А.А., Кузнецова Е.К. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. - СПб, Ультра Принт, 2014. - 326 с.
4. Муравьев В.В., Стрижак В.А., Балобанов Е.Н. К расчету параметров системы намагничивания электромагнитно-акустического преобразователя / Измерительная техника, 2011, №1(17), с. 197-205.
5. Самокрутов А.А., Бобров В.Т., Шевалдыкин В.Г., Козлов В.Н., Алехин С.Г., Жуков А.В. Исследование анизотропии проката и ее влияния на результаты акустических измерений. // Контроль. Диагностика. 2003, №11. С. 6-8, 13-19].
6. Гобов Ю.Л., Михайлов А.В., Смородинский Я.Г. Намагничивающая система для ЭМА-сканера-дефектоскопа / Дефектоскопия, 2014, №11, с. 48-56.
7. Патент RU 108626.
8. Патент RU 2350943.
9. Патент RU 2489713.
10. Марков А.А., Антипов А.Г. Магнитодинамический метод контроля рельсов // В мире неразрушающего контроля. 2012, - №3(57). С. 66-71.
11. Антипов А.Г., Марков А.А. Оценка глубины выявления поперечных трещин магнитодинамическим методом в дефектоскопии рельсов / Дефектоскопия, 2014, №8, с. 57-68.
12. Патент RU 10465.
13. Патент RU 2225308.
14. Патент RU 2266225.
15. Патент US 6262573 В1.
16. Патент RU 127703.
17. Патент RU 2586090.
18. Патент RU 2521095.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| Способ высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2720043C1 |
| Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2722089C1 |
| Намагничивающий узел мобильного рельсового дефектоскопа | 2022 |
|
RU2793187C1 |
| Устройство магнитной дефектоскопии ободьев колесной пары | 2018 |
|
RU2680857C1 |
| Устройства намагничивания для дефектоскопии подошвы рельса | 2020 |
|
RU2745662C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| УСТРОЙСТВО МАГНИТНОЙ ДЕФЕКТОСКОПИИ РЕЛЬСОВ | 2016 |
|
RU2634806C1 |
Использование: для обнаружения дефектов в изделиях из электропроводящего материала бесконтактным способом. Сущность изобретения заключается в том, что электромагнитно-акустический преобразователь содержит узел намагничивания контролируемого изделия в виде двуосной тележки, соленоиды электромагнита размещены на осях колесных пар, а полюсами электромагнита служат колеса колесных пар тележки и узел индуктора с катушками индуктивности для создания переменного электромагнитного поля ультразвуковой частоты, размещенный в области магнитного поля с возможностью перемещения относительно намагничивающего узла, катушки индуктивности индуктора армированы в герметичную гибкую оболочку из износостойкого электроизолирующего материала и размещены на минимально возможном расстоянии от пятна контакта колеса тележки с контролируемым изделием. Технический результат: расширение функциональных возможностей электромагнитно-акустического преобразователя путем обеспечения ультразвукового бесконтактного контроля длинномерных изделий на значительных скоростях сканирования. 2 ил.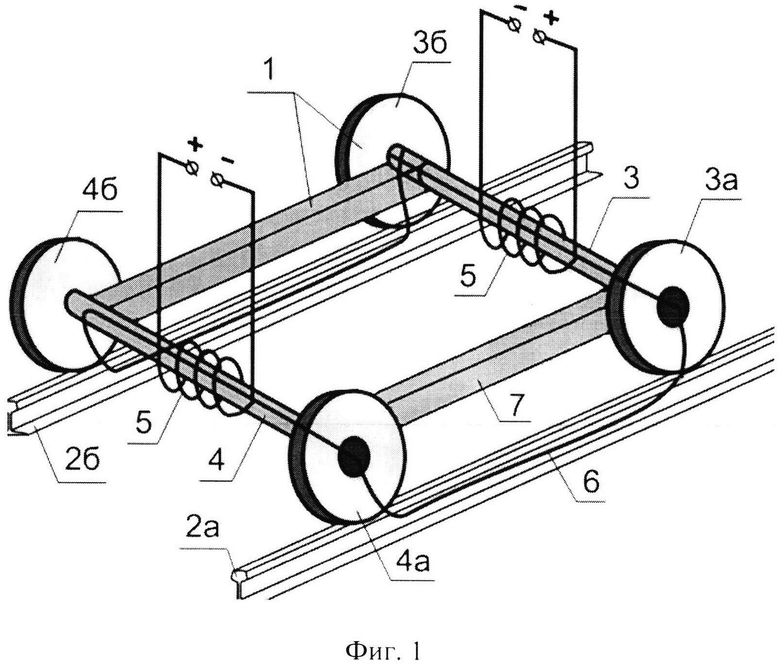
Электромагнитно-акустический преобразователь для ультразвукового контроля изделий из электропроводящего материала, содержащий узел намагничивания контролируемого изделия и узел индуктора с катушками индуктивности для создания переменного электромагнитного поля ультразвуковой частоты, размещенный в области магнитного поля с возможностью перемещения относительно намагничивающего узла, отличающийся тем, что узел намагничивания выполнен в виде двуосной тележки, соленоиды электромагнита размещены на осях колесных пар, а полюсами электромагнита служат колеса колесных пар тележки, катушки индуктивности индуктора армированы в герметичную гибкую оболочку из износостойкого электроизолирующего материала и размещены на минимально возможном расстоянии от пятна контакта колеса тележки с контролируемым изделием.
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2009 |
|
RU2489713C2 |
| ЗЕРКАЛЬНО-ТЕНЕВОЙ СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С РАЗНОСТНОЙ КОМПЕНСАЦИЕЙ МЕШАЮЩИХ ФАКТОРОВ | 2014 |
|
RU2560753C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184374C1 |
| УСТРОЙСТВО НАМАГНИЧИВАНИЯ ДЛЯ СРЕДСТВ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2006 |
|
RU2313782C2 |
| US 7389694B1, 24.06.2008 | |||
| KR 101356751B1, 04.02.2014. | |||

