Изобретение относится к области неразрушающего ультразвукового контроля проката и может быть использовано для выявления внутренних дефектов листов и полос из ферромагнитного материала.
Известен электромагнитно-акустический преобразователь (ЭМАП) [1], включающий магнитную систему, состоящую из постоянных магнитов, концентратора и катушки индуктивности, в которой постоянные магниты с рабочей поверхностью полюса одинаковой полярности повернуты друг к другу и прилегают к концентратору, а катушка находится на поверхности концентратора, прилегающей к верхней поверхности объекта контроля (ОК).
К недостатку известного ЭМАП относится невозможность быстрого отключения магнитной системы по технологическим причинам, например, при необходимости отвода ЭМАП от поверхности ОК или при необходимости удаления с рабочей поверхности ЭМАП окалины, притянутой к ней магнитным полем.
Известен электромагнитно-акустический преобразователь (ЭМАП) [2], который снабжен, по меньшей мере, двумя кольцевыми постоянными магнитами, плотно прилегающими друг к другу с расположением полюсов на наружной и внутренней боковой поверхности, по меньшей мере, одним круглым постоянным магнитом, смонтированным с одной стороны на их торцевой поверхности и обращенным к их внутренним полюсам одноименным полюсом и цилиндрическим концентратором, выполненным из ферромагнитного материала и установленным на одной оси с круглым постоянным магнитом внутри кольцевых магнитов с возможностью фиксации по высоте относительно катушки индуктивности.
К недостаткам известного ЭМАП относится невозможность быстрого отключения магнитной системы по технологическим причинам, например, при необходимости отвода ЭМАП от поверхности ОК или при необходимости удаления с рабочей поверхности ЭМАП окалины, притянутой к ней магнитным полем, а также наличие большого количества ненадежных в работе концентраторов, выполненных из порошка карбонильного железа на клее.
Общим недостатком известных ЭМАП является необходимость отвода от ОК всей конструкции ЭМАП (или блоков ЭМАП) для быстрого отключения магнитной системы, что усложняет их эксплуатацию.
Известно намагничивающее устройство [3], в котором магнитная система представляет собой П-образный магнитопровод, содержащий два постоянных магнита.
Выключение магнитного поля осуществляется путем поворота магнитов на 180°.
Известен коэрцитиметр на постоянных магнитах [4], которые имеют форму пластин и установлены с возможностью автономного вращения в цилиндрических отверстиях магнитопровода. Это позволяет управлять магнитным потоком, изменяя положение магнитов относительно друг друга на угол от 0° до 90°.
При α=0° полюса магнитов совпадают, и в изделии создается максимальный намагничивающий поток. При α=90° магнитный поток равен нулю, и прибор свободно снимается с изделия.
К недостатку известных устройств [3, 4], имеющих ручные поворотные магнитные системы, можно отнести невозможность их использования в электромагнитно-акустических преобразователях, в которых, как правило, требуется обеспечение быстрого (автоматического) отвода магнитной системы от объекта контроля без участия человека, так как УЗК-контроль осуществляется при движении проката, в частности, имеющего высокую температуру, а место контроля недоступно по условиям техники безопасности.
Задача, на решение которой направлено предлагаемое изобретение, заключается в создании электомагнитно-акустического преобразователя с поворотной магнитной системой, обеспечивающей его быстрый и надежный отвод или подвод к объекту контроля в автоматическом режиме без участия человека.
Это достигается тем, что в электромагнитно-акустическом преобразователе, содержащем корпус, подложку с концентратором, магнитную поворотную систему с постоянными магнитами, обращенными к друг к другу одноименными полюсами, катушку индуктивности, постоянные магниты смонтированы в обойме из магнитного материала, вставленной в цилиндрический барабан из немагнитного материала, установленного в корпусе преобразователя с возможностью вращения вокруг своей оси и соединенного при помощи ползуна, вставленного в направляющую гильзу из немагнитного материала, со штоком пневмоцилиндра, закрепленного на корпусе, барабан, магниты и обойма со стороны подложки с концентратором установлены по отношению к ним с зазором и выполнены по окружности с общим радиусом вращения, совпадающим с радиусом отверстия в корпусе, в которое вставлен барабан.
Описание чертежей
Фиг.1 - вид на ЭМАП спереди.
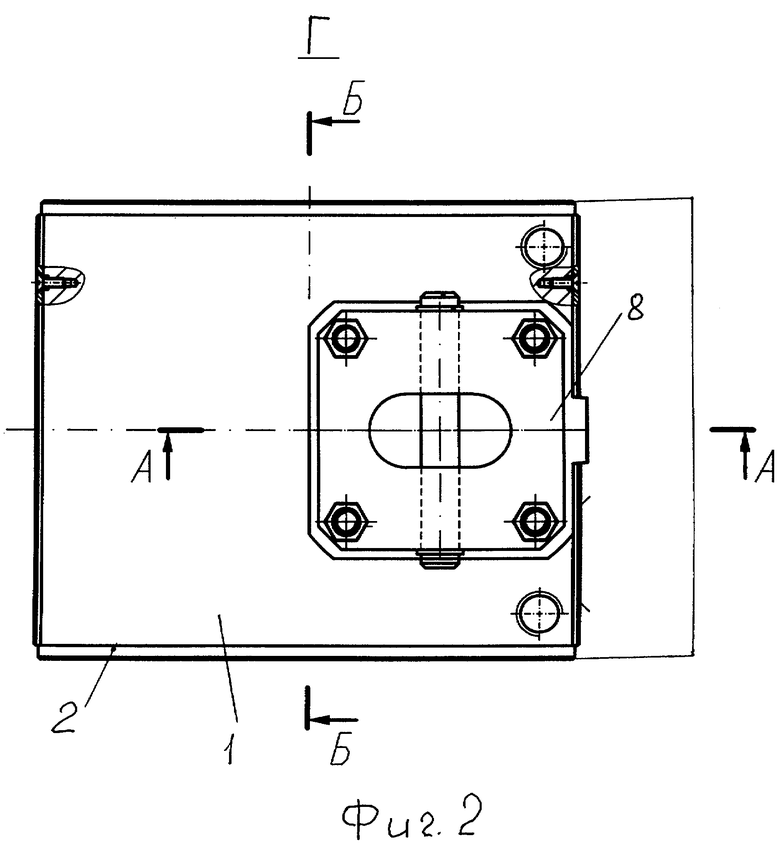
Фиг.2 - вид Г сверху.
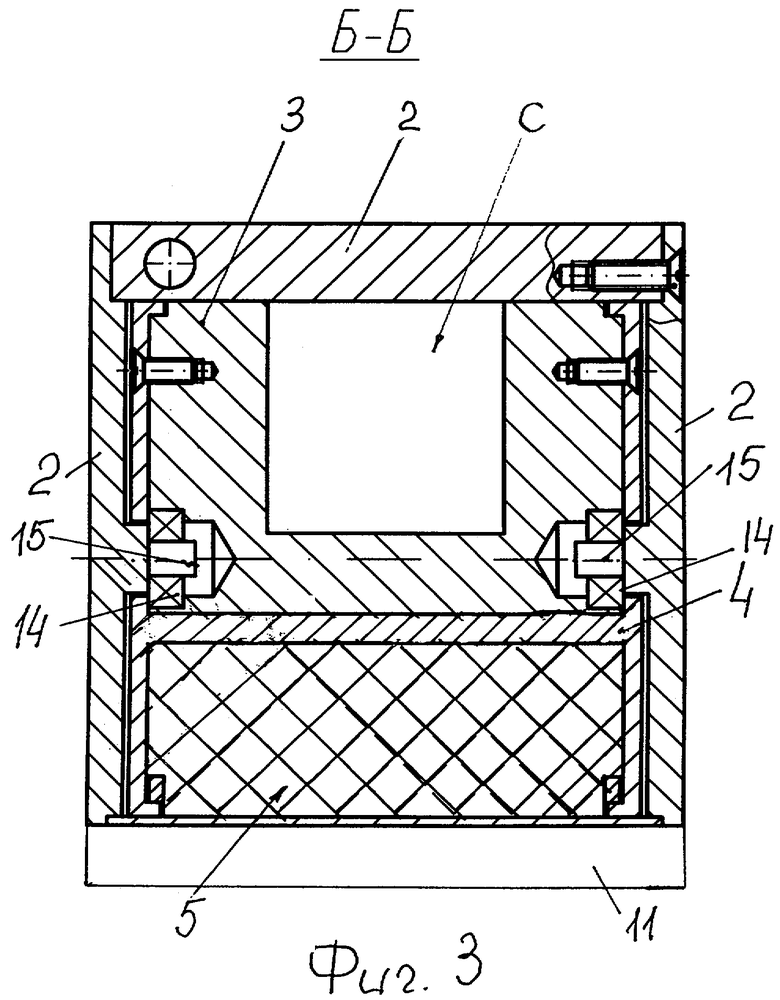
Фиг.3 - разрез Б-Б на фиг.2.
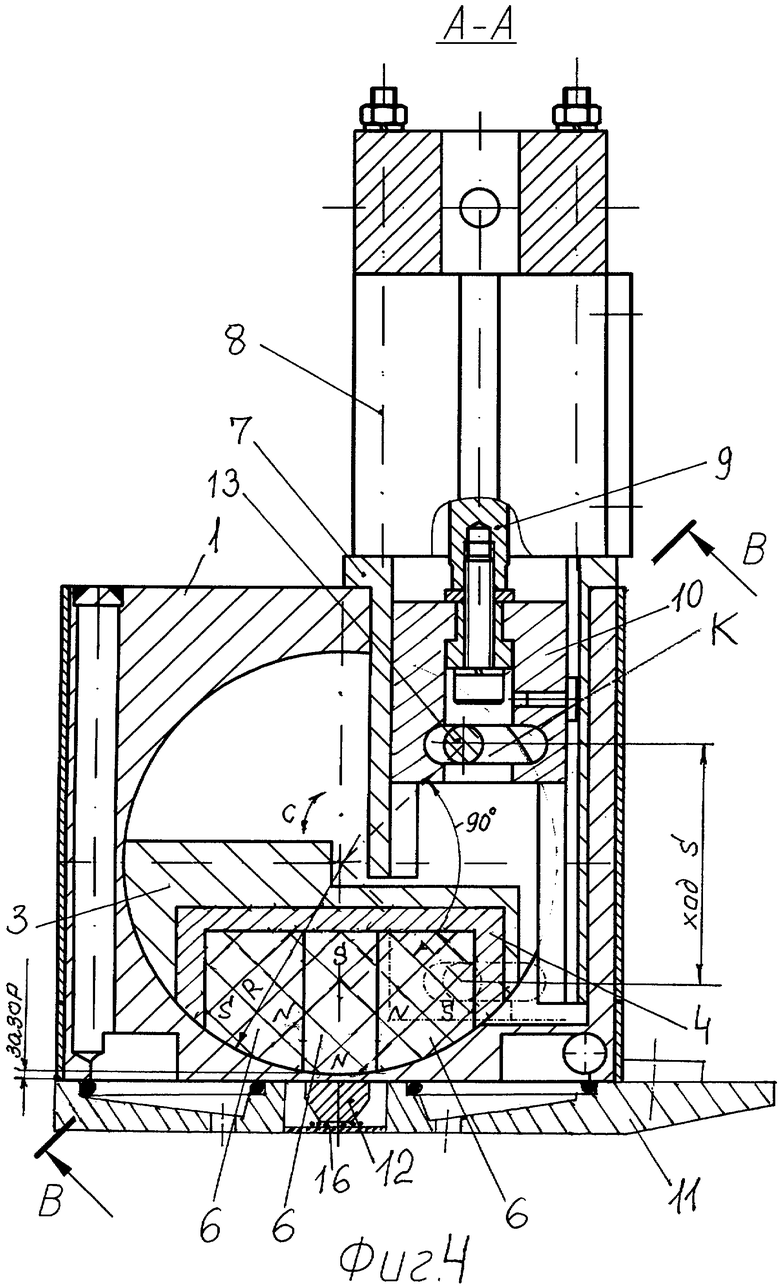
Фиг.4 - разрез А-А на фиг.2.
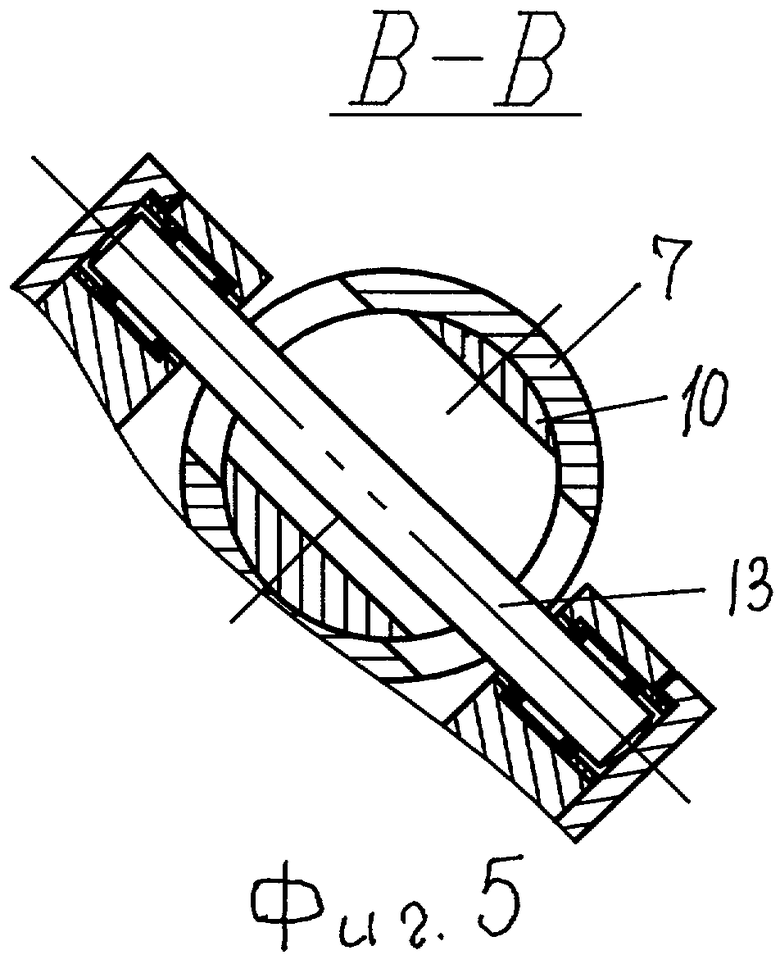
Фиг.5 - разрез В-В на фиг.5.
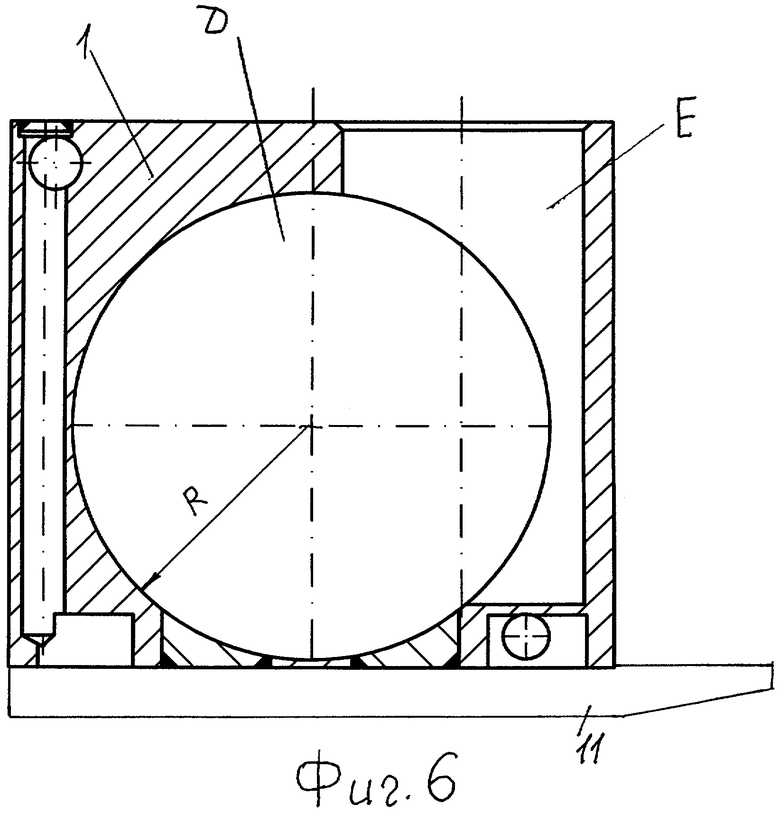
Фиг.6 - корпус ЭМАП (вертикальный разрез).
Описание конструкции ЭМАП с поворотной магнитной системой
На фиг.1 - фиг.6 показан предлагаемый электромагнитно-акустический преобразователь (ЭМАП).
ЭМАП содержит корпус 1, две боковые стенки 2, барабан 3, обойму 4, магнитную систему 5, состоящую из трех постоянных магнитов 6, обращенных друг к другу одноименными полюсами, направляющую гильзу 7, пневмоцилиндр 8, на штоке 9 которого смонтирован ползун 10 с возможностью перемещения вдоль оси пневмоцилиндра 8 по направляющей гильзе 7, подложку 11, концентратор 12, закрепленный на подложке 11. Кинематическое соединение и трансформация вертикального перемещения ползуна 10 по направляющей гильзе 7 во вращательное перемещение барабана 3 совместно с магнитной системой 5 по радиусу R относительно подложки 11 осуществляется за счет пальца 13, проходящего через овальный паз «К» в ползуне 10 и закрепленного с двух сторон на боковых сторонах паза «С», выполненного в барабане 3 для перемещения относительно направляющей гильзы 7 при повороте по радиусу R на угол, равный 90°. При повороте барабана 3 на 90° палец 13 перемещается (по окружности) на величину S, равную ходу штока 9 пневмоцилиндра 8.
В корпусе 1 для вращения барабана 3 выполнено сквозное отверстие «D» и паз «Е» для установки направляющей гильзы 7.
Барабан 3 установлен на подшипники 14 при помощи осей 15, закрепленных на боковых стенках 2.
Принцип действия поворотной системы ЭМАП
В рабочем положении шток 9 пневмоцилиндра 8 вместе с ползуном 10 поднят в верхнее положение, и магнитная система 5 по оси симметрии совмещена с концентратором 12, на котором находится катушка индуктивности 16.
В этом положении магнитный поток замыкается на концентратор 12 полностью, и происходит зондирование объекта контроля.
При необходимости быстрого отвода ЭМАП от объекта контроля (условно не показан) в соответствующую полость пневмоцилиндра 8 подается сжатый воздух, и шток 9 перемещается на ход S.
При этом за счет вышеописанного кинематического соединения между ползуном 10 и барабаном 3 последний поворачивается вокруг своей оси на угол 90° вместе с магнитной системой 5. При этом магнитный поток резко уменьшается, что позволяет легко отвести ЭМАП (или группу ЭМАП) от объекта контроля и произвести, например, (самопроизвольное) сбрасывание окалины с поверхности немагнитной подложки 11 в автоматическом режиме.
Источники информации
1. Патент Германии DE 4011686.
2. Патент РФ №2243550.
3. Патент РФ №33653 - полезная модель.
4. Патент РФ №2210786.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2408882C1 |
| ПОДВЕСКА ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2008 |
|
RU2390013C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2295125C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2447430C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2271876C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2243550C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2265208C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2300762C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2258218C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2237892C1 |
Использование: для неразрушающего ультразвукового контроля проката. Сущность заключается в том, что электромагнитно-акустический преобразователь содержит корпус, подложку с концентратором, магнитную систему с постоянными магнитами, обращенными друг к другу одноименными полюсами, катушку индуктивности, при этом постоянные магниты смонтированы в обойме из магнитного материала, вставленной в цилиндрический барабан из немагнитного материала, установленного в корпусе преобразователя с возможностью вращения вокруг своей оси и соединенного при помощи ползуна, вставленного в направляющую гильзу из немагнитного материала, со штоком пневмоцилиндра, закрепленного на корпусе, барабан, магниты и обойма со стороны подложки с концентратором установлены по отношению к ним с зазором и выполнены по окружности с общим радиусом, совпадающим с радиусом отверстия в корпусе, в которое вставлен барабан. Технический результат: создание электомагнитно-акустического преобразователя с поворотной магнитной системой, обеспечивающей его быстрый и надежный отвод или подвод к объекту контроля в автоматическом режиме без участия человека. 6 ил.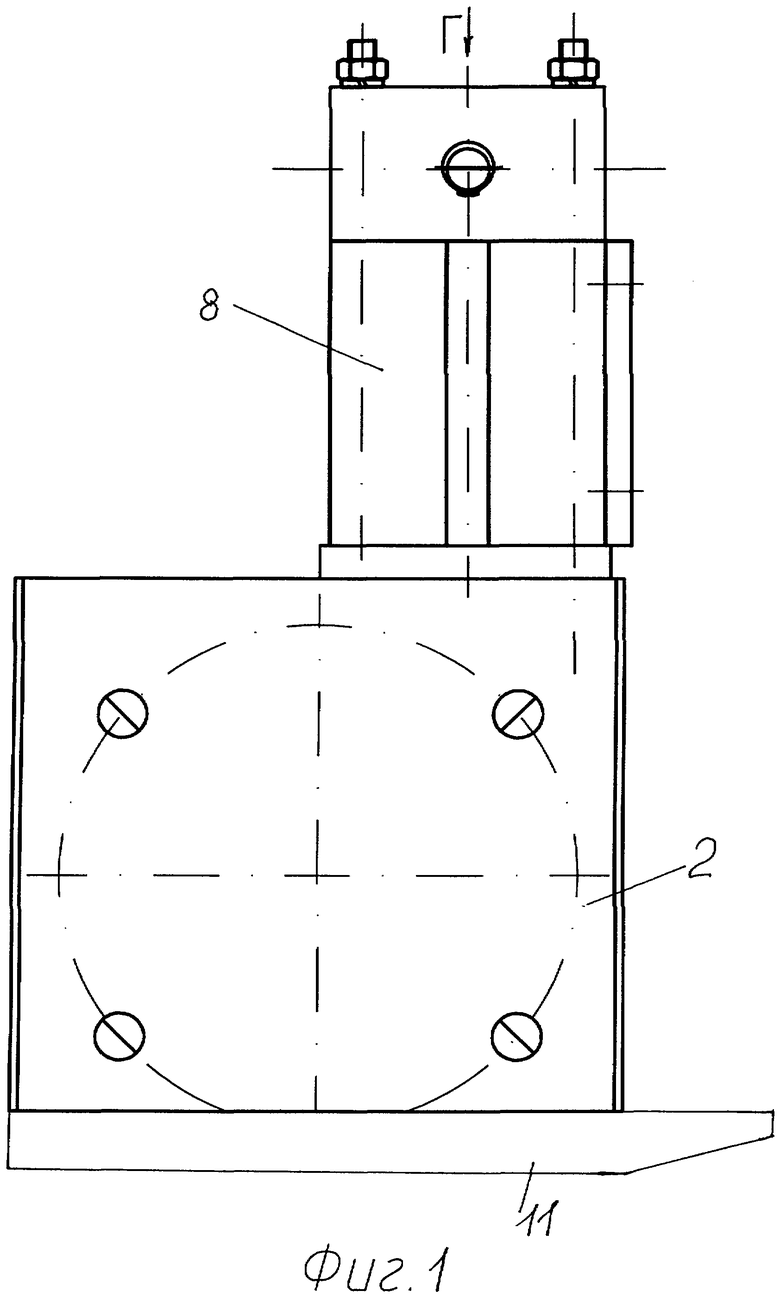
Электромагнитно-акустический преобразователь, содержащий корпус, подложку с концентратором, магнитную систему с постоянными магнитами, обращенными друг к другу одноименными полюсами, катушку индуктивности, отличающийся тем, что постоянные магниты смонтированы в обойме из магнитного материала, вставленной в цилиндрический барабан из немагнитного материала, установленного в корпусе преобразователя с возможностью вращения вокруг своей оси и соединенного при помощи ползуна, вставленного в направляющую гильзу из немагнитного материала, со штоком пневмоцилиндра, закрепленного на корпусе, барабан, магниты и обойма со стороны подложки с концентратором установлены по отношению к ним с зазором и выполнены по окружности с общим радиусом, совпадающим с радиусом отверстия в корпусе, в которое вставлен барабан.
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2243550C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2219540C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2247978C1 |
| ЕР 0451375 А2, 16.10.1991 | |||
| US 5741973 A, 21.04.1998. | |||

