Заявляемое изобретение относится к области машиностроения, а более конкретно, к устройствам преобразования вращательного движения в возвратно-поступательное и наоборот, и может быть использовано, например, в двигателях внутреннего сгорания, компрессорах, насосах.
Известен аксиально-поршневой двигатель с противоположно движущимися поршнями (заявка №2001105860 от 27.02.2003), содержащий корпус, вал, цилиндры, расположенные вокруг и параллельно оси вала, по два поршня с шатунами-поводками в каждом цилиндре, неподвижно закрепленные на валу две косые втулки и две качающиеся шайбы с радиальными цапфами, связанными шарнирно с шатунами-поводками, поршни имеют уплотнения с обоих торцов, а рабочие процессы двигателя совершаются как в объеме между поршнями с одной стороны, так и между торцевыми крышками цилиндров и поршнями с другой.
Недостатками аналога являются большие габариты вследствие наличия несовпадения оси приводного вала и оси цилиндров, повышенных габаритов механизма возвратно-поступательного движения поршней, а также снижение КПД механизма и его долговечности из-за давления поршней на стенки цилиндров и возникновения в нем неуравновешенных сил инерции.
Прототипом заявляемого изобретения является устройство преобразования вращательного движения в возвратно-поступательное и наоборот, патент RU №2059133 С1, содержащее корпус, размещенный в нем ползун цилиндрической формы с замкнутой винтовой канавкой, кинематически связанное с ползуном и фиксированное от перемещения вдоль своей оси вращения тело вращения в виде маховика, кинематическая связь между ползуном и телом вращения выполнена в виде поводков, зафиксированных в маховике, предназначенных для взаимодействия одной стороной с телом вращения, а другой стороной для взаимодействия с боковой поверхностью замкнутой винтовой канавки. Проворот ползуна относительно корпуса ограничен шлицевым соединением.
Прототип работает следующим образом. При приложении крутящего момента к маховику он начинает разворачиваться относительно своей оси, а зафиксированный в нем поводок начинает давить на боковую поверхность винтовой канавки, вследствие ограничения возможности проворота ползуна шлицевым соединением его с корпусом ползун начинает поступательное движение. После достижения ползуном крайнего положения происходит переход поводка в реверсивную ветвь винтовой канавки (ветвь, имеющую обратное направление) и ползун, таким образом, меняет направление движения на противоположное. Цикл повторяется, вследствие чего вращательное движение преобразуется в возвратно-поступательное. При обратном преобразовании движения возвратно-поступательного во вращательное усилие прикладывается к ползуну. При этом ползун боковой поверхностью винтовой канавки воздействует на поводок, закрепленный в маховике, что вызывает вращение маховика. При достижении ползуном крайнего положения за счет силы инерции вращательного движения маховика происходит переход поводка в реверсивную ветвь винтовой канавки и при изменении направления прикладываемой нагрузки на противоположное вращательное движение маховика продолжается в том же направлении.
Недостатком прототипа является пониженный ресурс его работы и КПД, особенно при больших скоростях вращательного и возвратно-поступательного движений, вследствие возникновения трения скольжения в узле фиксации поводков в маховике, между поводками и поверхностью винтовой канавки, что ограничивает скоростные, силовые характеристики механизма, а также область его применения.
Технической задачей заявляемого устройства является повышение его надежности и долговечности, а также обеспечение возможности работы устройства при больших скоростях вращательного и возвратно-поступательного движений и силовых нагрузках за счет замены трения скольжения на трение качения и исключения давления ползуна на опоры.
Поставленная задача решается тем, что заявляемое устройство содержит корпус, в котором размещено тело вращения в виде маховика, фиксированное от смещения вдоль оси вращения, и ползун, установленный с возможностью возвратно-поступательного перемещения вдоль оси вращения, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, между ползуном и телом вращения размещен поводок, проворот ползуна относительно корпуса ограничен шлицевым соединением, в котором в отличие от прототипа винтовая канавка выполнена с четным количеством витков, поводки шарообразные и расположены в диаметрально противоположных точках винтовой канавки ползуна, их количество соответствует количеству витков винтовой канавки, поводки вставлены в пазы в маховике и боковой поверхностью, выходящей за пределы ползуна, опираются на кольца подшипников качения, имеющие радиусные, кольцевые канавки.
Благодаря новой совокупности существенных признаков заявляемого изобретения получаем увеличение надежности и долговечности устройства преобразования движения при одновременном увеличении скоростных и силовых нагрузок. Это объясняется тем, что вследствие опирания шаровых поводков на подвижные кольца подшипников качения и возможности качения поводков по кольцевым канавкам, выполненным на контактирующих с ними кольцах подшипников, обеспечивается, несмотря на сложное движение поводков, отсутствие трения скольжения между поводками и боковой поверхностью винтовой канавки, вызывающего износ поводков и канавки. При этом использование в рассматриваемом устройстве винтовых канавок с четным количеством витков и диаметрально противоположного расположения поводков, количество которых равно числу витков канавки, позволяет перераспределить действующие в устройстве усилия между поводками и исключить давление ползуна на его опоры в корпусе, что значительно снижает потери на трение и износ в этих узлах.
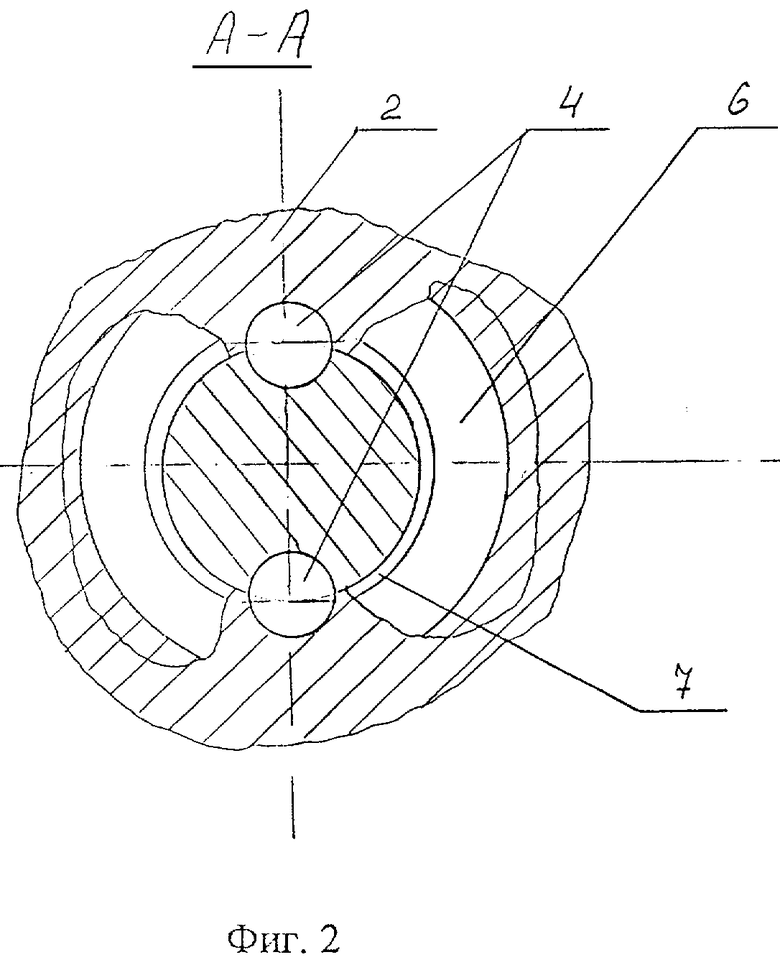
На фиг. 1 и 2 схематично представлен вариант выполнения заявляемого устройства.
Заявляемое устройство содержит корпус 1, в котором установлен маховик 2. В корпусе 1 также установлен цилиндрический ползун 3, имеющий возможность перемещения вдоль оси маховика 2. При этом ось вращения маховика 2 совпадает с продольной осью ползуна 3. Проворот ползуна 3 относительно корпуса 1 ограничен шлицевыми соединениями, представляющими собой продольные пазы 9 в ползуне 3 и корпусе 1, в которых утоплены шарики 8. На цилиндрической поверхности ползуна 3 выполнена замкнутая винтовая канавка 5, в которой наполовину утоплены шаровидные поводки 4, вторая половина поводков, выходящая за пределы ползуна, вставлена в пазы в маховике 3 (фиг.2) и опирается на радиусные кольцевые канавки 7 подвижных колец подшипников качения 6.
Устройство работает следующим образом. При приложении крутящего момента к маховику 2 он начинает разворачиваться относительно своей оси, а зафиксированные в его пазах поводки 4 начинают давить на боковую поверхность винтовой канавки 5, вследствие ограничения возможности проворота ползуна 3 шлицевым соединением 8, 9 его с корпусом 1, ползун начинает поступательное движение. После достижения ползуном 3 крайнего положения происходит переход поводков 4 в реверсивную ветвь винтовой канавки 5 (ветвь, имеющую обратное направление) и ползун 3, таким образом, меняет направление движения на противоположное. Цикл повторяется, вследствие чего вращательное движение преобразуется в возвратно-поступательное.
При преобразовании возвратно-поступательного движения во вращательное усилие прикладывается к ползуну 3. При этом ползун 3 боковой поверхностью винтовой канавки 5 воздействует на поводки 4, что вызывает вращение маховика 2. При достижении ползуном 3 крайнего положения за счет силы инерции вращательного движения маховика 2 происходит переход поводка в реверсивную ветвь винтовой канавки 5 и при изменении направления прикладываемой нагрузки на противоположное вращательное движение маховика 2 продолжается в том же направлении.
Возникающее при преобразовании вращательного движения маховика 2 в возвратно-поступательное движение ползуна 3 осевое усилие, либо усилие, действующее на ползун 3 при обратном преобразовании движения, через поводки 4 передается на подшипники качения 6, зафиксированные в корпусе 1. При этом за счет отсутствия жесткой фиксации поводков 4 в маховике 2 и их опоры на подшипники качения 6 а также наличие на кольцах подшипников кольцевых радиусных канавок 7, по которым перемещаются поводки, достигается движение качения поводков 4 относительно боковой поверхности винтовой канавки 5, и колец подшипников, несмотря на сложный характер движение поводков 4, характеризующиеся изменением в процессе работы механизма оси, направления и скорости их вращения. Качение поводков 4 по поверхностям винтовой канавки 5 и кольцевым канавкам 7 подшипников качения 6 обеспечивает минимальные потери энергии на трение в устройстве, а также повышение работоспособности устройства при одновременном увеличении скоростных и силовых нагрузок, действующих на устройство.
Повышение работоспособности и снижение потерь энергии на трение в устройстве обеспечивает также применение в устройстве винтовых канавок с четным числом витков и диаметрально противоположное расположение поводков, количество которых равно числу витков винтовой канавки. При такой компоновке устройства исключается давление ползуна на его опоры в корпусе за счет взаимной компенсации моментов сил реакций, возникающих в поводках, и действующие в устройстве осевые нагрузки равномерно распределяются между поводками, что снижает величину контактных напряжений, действующих в зонах контакта поводков с поверхностью винтовой канавки, и с радиусными кольцевыми канавками на подшипниках.
Радиусные кольцевые канавки, выполненные на подвижных кольцах подшипников качения, ограничивают радиальное перемещение поводков и обеспечивают максимальную длину линии контакта поводков и подшипников качения, что также способствует возможности увеличения силовой нагруженности устройства и его работоспособности.
Таким образом, за счет введения новой совокупности существенных признаков можно решить поставленную техническую задачу, вытекающую из современного уровня техники.
Изобретение относится к области машиностроения, в частности к устройствам преобразования вращательного движения в возвратно-поступательное и наоборот, и может быть использовано, например, в двигателях внутреннего сгорания, компрессорах, насосах. Заявленное изобретение содержит корпус, в котором размещено тело вращения в виде маховика, фиксированное от смещения вдоль оси вращения, и ползун, установленный с возможностью возвратно-поступательного перемещения вдоль оси вращения, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, между ползуном и телом вращения размещен поводок, проворот ползуна относительно корпуса ограничен шлицевым соединением. Замкнутая винтовая канавка выполнена с четным количеством витков. Поводки выполнены шарообразными и расположены в диаметрально противоположных точках замкнутой винтовой канавки ползуна, и их количество соответствует количеству витков замкнутой винтовой канавки. Поводки вставлены в пазы в маховике и боковой поверхностью, выходящей за приделы ползуна, опираются на кольца подшипников качения, имеющие радиусные кольцевые канавки. Технический результат заключается в повышении надежности и долговечности устройства, а также в обеспечении возможности его работы при больших скоростях вращательного и возвратно-поступательного движения и силовых нагрузках. 2 ил.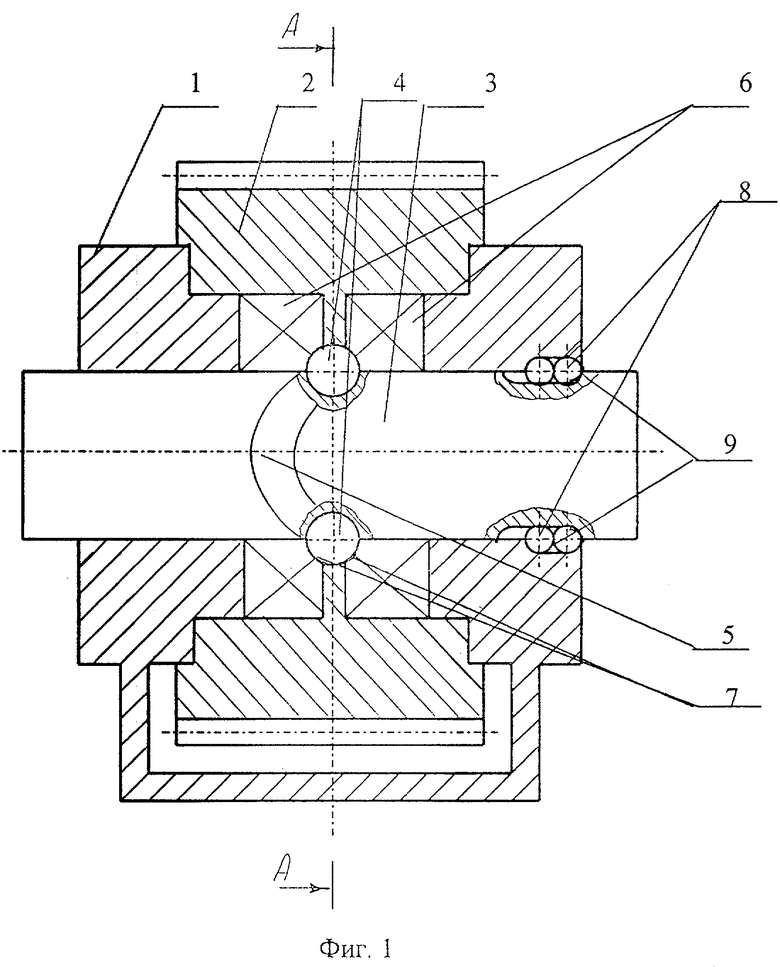
Устройство для преобразования вращательного движения в возвратно-поступательное и наоборот, содержащее корпус, в котором размещено тело вращения в виде маховика, фиксированное от смещения вдоль оси вращения, и ползун, установленный с возможностью возвратно-поступательного перемещения вдоль оси вращения, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, между ползуном и телом вращения размещен поводок, проворот ползуна относительно корпуса ограничен шлицевым соединением, отличающееся тем, что замкнутая винтовая канавка выполнена с четным количеством витков, поводки выполнены шарообразными и расположены в диаметрально противоположных точках замкнутой винтовой канавки ползуна и их количество соответствует количеству витков замкнутой винтовой канавки, поводки вставлены в пазы в маховике и боковой поверхностью, выходящей за пределы ползуна, опираются на кольца подшипников качения, имеющие радиусные кольцевые канавки.
| RU 2059133 C1, 27.04.1996 | |||
| US 3792616, 19.02.1974 | |||
| DE 2902025 B1, 03.07.1980. |

