Заявляемое изобретение относится к области машиностроения, а более конкретно - к устройствам преобразования вращательного движения в возвратно-поступательное, и может быть использовано в механизмах, где необходимо преобразовывать вращательное движение в возвратно-поступательное, а также где необходима регулировка амплитуды возвратно-поступательного движения, например в компрессорах, насосах для регулировки их производительности, в прессовом оборудовании и т.п.
Известно устройство преобразования вращательного движения в возвратно-поступательное и наоборот, патент RU №2059133 С1, содержащее корпус, размещенный в нем ползун цилиндрической формы с замкнутой винтовой канавкой, кинематически связанное с ползуном и фиксированное от перемещения вдоль своей оси вращения тело вращения в виде маховика, кинематическая связь между ползуном и телом вращения выполнена в виде поводков, зафиксированных в маховике, предназначенных для взаимодействия одной стороной с телом вращения, а другой стороной - с боковой поверхностью замкнутой винтовой канавки. Проворот ползуна относительно корпуса ограничен шлицевым соединением.
Устройство работает следующим образом. При приложении крутящего момента к маховику он начинает разворачиваться относительно своей оси, а зафиксированный в нем поводок начинает давить на боковую поверхность винтовой канавки, вследствие ограничения возможности проворота ползуна шлицевым соединением его с корпусом ползун начинает поступательное движение. После достижения ползуном крайнего положения происходит переход поводка в реверсивную ветвь винтовой канавки (ветвь, имеющую обратное направление), и ползун, таким образом, меняет направление движения на противоположное. Цикл повторяется, вследствие чего вращательное движение преобразуется в возвратно-поступательное.
Недостатком аналога является отсутствие возможности изменения величины амплитуды возвратно-поступательного движения, а также невозможность получения большой амплитуды возвратно-поступательного движения при малом диаметре ползуна.
Прототипом заявляемого изобретения является устройство преобразования вращательного движения в возвратно-поступательное и наоборот, патент RU №2288392 С1, содержащее корпус, в котором размещено тело вращения в виде маховика, фиксированное от смещения вдоль оси вращения, и ползун, установленный с возможностью возвратно-поступательного перемещения вдоль оси вращения. На боковой поверхности ползуна выполнена замкнутая винтовая канавка. Между ползуном и маховиком размещены поводки, одна часть которых зафиксирована в маховике, а другая часть утоплена в винтовой канавке ползуна. Проворот ползуна относительно корпуса ограничен шлицевым соединением. В маховике выполнены продольные пазы, в которых размещены поводки, имеющие возможность перемещения в пазах маховика вдоль оси ползуна. При этом перемещение поводков ограничивается упорными элементами, также имеющими возможность перемещения вдоль оси ползуна и фиксации в заданном положении.
Прототип работает следующим образом. При приложении крутящего момента к маховику он начинает разворачиваться относительно своей оси, и вставленные в его пазы поводки начинают давить на боковую поверхность винтовой канавки и перемещаться вдоль продольных пазов маховика до упорного элемента. При достижении поводками упорного элемента давление поводков на боковую поверхность винтовой канавки, вследствие ограничения возможности проворота ползуна шлицевым соединением его с корпусом, вызывает поступательное движение ползуна. После достижения ползуном крайнего положения происходит переход поводков в реверсивную ветвь винтовой канавки (ветвь, имеющую обратное направление), и ползун, таким образом, меняет направление движения на противоположное, однако оно может начаться только лишь после перемещения поводков по пазам до противоположного упора. Цикл повторяется, вследствие чего вращательное движение преобразуется в возвратно-поступательное, при этом амплитуда возвратно-поступательного движения уменьшается на величину перемещения поводков между упорными элементами в продольных пазах. При равенстве величины размаха винтовой канавки величине перемещения поводков между упорными элементами происходит полное прекращение возвратно-поступательного движения. При смещении упорных элементов в ту или иную сторону вдоль оси ползуна происходит изменение положения верхней и нижней мертвых точек ползуна. Смещение упорных элементов и их фиксация осуществляется за счет опор, закрепленных в корпусе.
Недостатком прототипа является невозможность получения большой амплитуды возвратно-поступательного движения при малом диаметре ползуна, конструктивная сложность организации перемещения и фиксации упорных элементов механизма регулировки амплитуды, а также наличие ударных нагрузок при достижении поводком упорного элемента.
Технической задачей заявляемого устройства является обеспечение получения большой амплитуды возвратно-поступательного движения при малом диаметре ползуна, конструктивное упрощение механизма регулировки амплитуды возвратно-поступательного движения, а также устранение ударных нагрузок в механизме преобразования движения.
Техническим результатом заявляемого устройства является уменьшение габаритных размеров, сложности, материалоемкости, повышение долговечности и надежности устройства.
Технический результат достигается тем, что заявляемое устройство, содержащее корпус, в котором установлен ползун, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, в которой утоплены поводки на половину их высоты, при этом вдоль оси ползуна размещен приводной вал, совершающий вращательное движение и передающий его ползуну через подвижное вдоль оси ползуна шлицевое соединение, вторая половина поводков, размещенных в замкнутой винтовой канавке ползуна, выходящая за его пределы, зафиксирована в обойме, установленной в кольцевом пазу, выполненном в корпусе, с возможностью проворота вокруг оси ползуна. При этом обойма кинематически связана с приводным элементом, обеспечивающим проворот и фиксацию обоймы с поводками относительно корпуса, что вызывает у ползуна, дополнительно к вращательному движению, возвратно-поступательное движение. На противоположном от приводного вала торце ползуна выполнена цилиндрическая полость, в которой с возможностью перемещения вдоль оси размещен дополнительный ползун, при этом на наружной цилиндрической поверхности дополнительного ползуна выполнена замкнутая винтовая канавка, аналогичная замкнутой винтовой канавке ползуна, в которой утоплены поводки. Вторая половина поводков, выходящая за пределы дополнительного ползуна, зафиксирована в первом ползуне. Проворот дополнительного ползуна относительно корпуса ограничен подвижным в осевом направлении шлицевым соединением. Приводной элемент обоймы с поводками может быть выполнен в виде зубчатой рейки, червяка, винта, кулачка.
Благодаря новой совокупности существенных признаков заявляемого изобретения обеспечивается возможность получения большой амплитуды возвратно-поступательного движения при уменьшении габаритных размеров, материалоемкости устройства. Это объясняется тем, что вследствие наличия в заявляемом устройстве двух ползунов, кинематически связанных между собой и корпусом поводками, наполовину утопленными в замкнутых винтовых канавках, выполненных на боковых поверхностях ползунов, исходное вращательное движение приводного вала преобразуется в возвратно-поступательное движение каждым из этих ползунов, т.е. дважды (две ступени преобразования). При этом в зависимости от положения поводков в замкнутых винтовых канавках ползунов, которое определяет положение ползунов относительно корпуса, возвратно-поступательные движения ползунов могут складываться и вычитаться. При сложении движений обеспечивается возможность получения амплитуды возвратно-поступательного движения в виде суммы возвратно-поступательных движений каждого из ползунов (максимальная амплитуда), а при вычитании - нулевой амплитуды. Кроме этого, изменение положения поводков в замкнутой винтовой канавке ползуна, совершающего одновременно вращательное и возвратно-поступательное движения, относительно корпуса путем проворота обоймы, в которой зафиксированы поводки, позволяет плавно изменять амплитуду возвратно-поступательного движения, преобразованного из вращательного движения, от максимальной до нулевой.
Такое упрощение способа и механизма регулировки амплитуды возвратно-поступательного движения, а также устранение ударных нагрузок обеспечивает повышение долговечности и надежности заявляемого устройства.
На фигурах 1, 2, 3 схематично представлено заявляемое устройство.
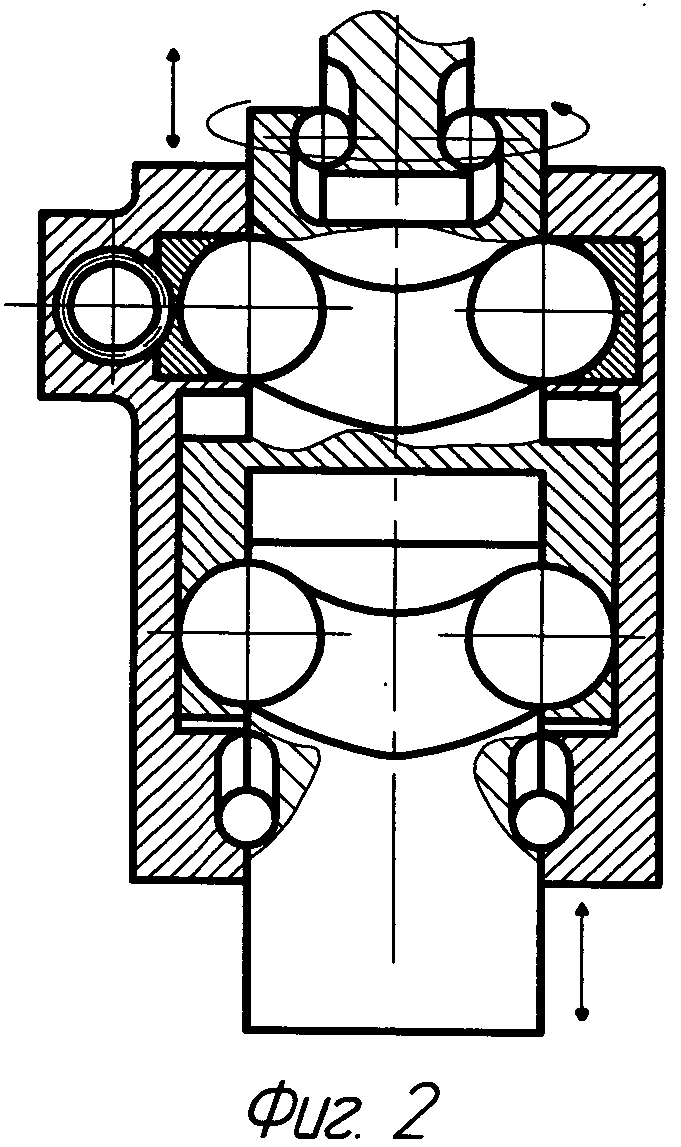
Заявляемое устройство содержит корпус 1, в котором установлен цилиндрический ползун 2. Вдоль оси ползуна 2 размещен приводной вал 3, совершающий вращательное движение и передающий его ползуну 2 через подвижное вдоль оси ползуна шлицевое соединение, которое, как вариант, состоит из продольных канавок 4, выполненных во внутренней полости ползуна 2, и продольных канавок 5, изготовленных на приводном валу 3 напротив продольных канавок 4, в которых находятся шарики 6. На наружной цилиндрической поверхности ползуна 2 выполнена замкнутая винтовая канавка 7, в которой наполовину утоплены поводки 8. Половина поводков 8, выходящая за пределы ползуна 2, зафиксирована в обойме 9, установленной в кольцевом пазу, выполненном в корпусе 1, с возможностью проворота вокруг оси ползуна 2, при этом обойма кинематически связана с приводным элементом 10, обеспечивающим проворот и фиксацию обоймы 9 с поводками 8 относительно корпуса 1. Приводной элемент 10 обоймы 9 с поводками 8 может быть выполнен в виде зубчатой рейки, червяка, винта, кулачка и т.п. На противоположном от приводного вала 3 торце ползуна 2 выполнена цилиндрическая полость, в которой с возможностью перемещения вдоль оси размещен дополнительный ползун 11. На наружной цилиндрической поверхности дополнительного ползуна 11 выполнена замкнутая винтовая канавка 12, аналогичная замкнутой винтовой канавке 7 ползуна 2. В замкнутой винтовой канавке 12, в свою очередь, утоплены поводки 13, вторая половина которых, выходящая за пределы дополнительного ползуна 11, зафиксирована в ползуне 2. Проворот дополнительного ползуна 11 относительно корпуса 1 ограничен подвижным в осевом направлении шлицевым соединением, которое, как вариант, состоит из продольных канавок 14, выполненных на цилиндрической поверхности дополнительного ползуна 11, и продольных канавок 15, изготовленных в корпусе 1 напротив продольных канавок 14, в которых, в свою очередь, размещены шарики 16.
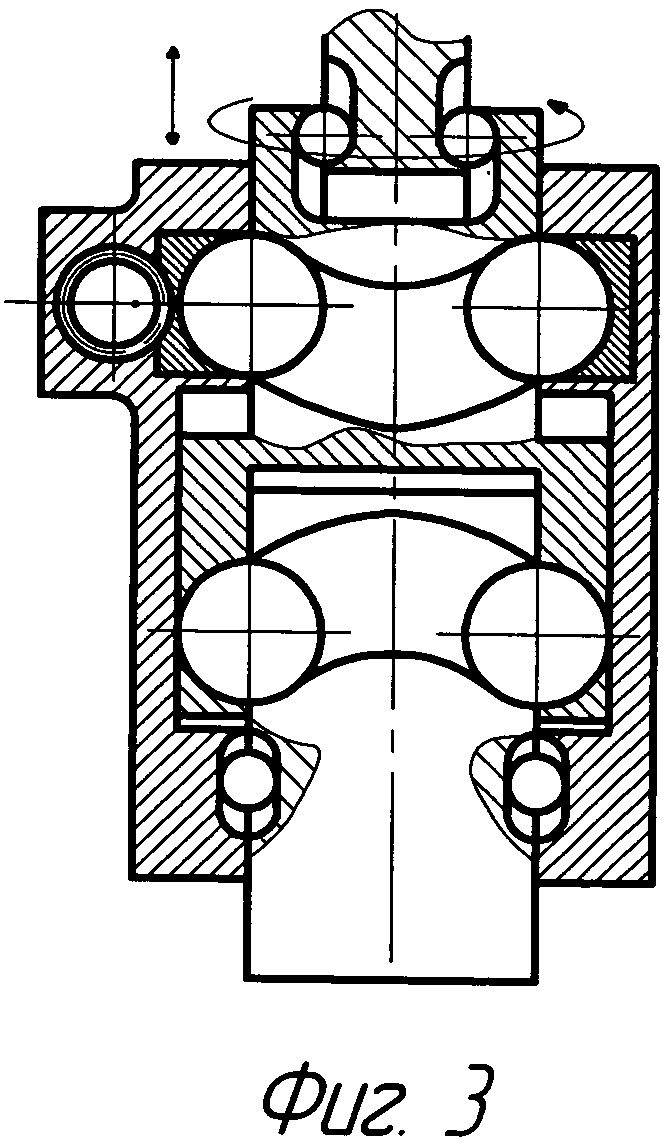
Заявляемое устройство работает следующим образом. При необходимости преобразования вращательного движения в возвратно-поступательное с максимальной амплитудой ползуны 2 и 11 ориентируются относительно друг друга с помощью приводного элемента 10, обеспечивающего проворот и фиксацию от проворота обоймы 9 с поводками 8 в таком положении, при котором поводки 8 и 13 находятся внизу витков замкнутых винтовых канавок 7 и 12, при этом ползуны 2 и 11 находятся в верхних мертвых точках (фиг. 1). При таком положении ползунов 2 и 11, при приложении крутящего момента к приводному валу 3, крутящий момент через шлицевое соединение, организованное продольными пазами 4 и 5 ползуна 2 и приводного вала 3 соответственно и шариками 6, передается на ползун 2, который под его действием начинает вращаться. Вращаясь, ползун 2 боковой поверхностью винтовой канавки 7 воздействует на поводки 8, зафиксированные в обойме 9. Вследствие наличия наклона боковой поверхности винтовой канавки 7 к плоскости, в которой происходит вращение ползуна 2, возникает осевое усилие, вызывающее поступательное перемещение ползуна 2 вдоль его оси вниз к его нижней мертвой точке. Таким образом, ползун 2 совершает одновременно вращательное и поступательное движение. Одновременно усилия от крутящего момента вращательного движения ползуна 2 через поводки 13 воздействуют на наклонную к плоскости вращения ползуна 2 боковую поверхность винтовой канавки 12 ползуна 11, вызывая, вследствие фиксации ползуна 11 от проворота относительно корпуса 1 шлицевым соединением, организованным продольными пазами 14 и 15 ползуна 11, корпуса 1, соответственно и шариками 16, поступательное движение ползуна 11, которое суммируется с поступательным движением ползуна 2. Следовательно, в нижней мертвой точке дополнительного ползуна 11 амплитуда его поступательного движения равна сумме амплитуд поступательных движений ползуна 2 и дополнительного ползуна 11, возникающих вследствие преобразования вращательного движения ползуна 2 в поступательное движение ползуна 2, и в поступательное движение ползуна 11 (фиг. 2).
После достижения ползуном 2 и дополнительным ползуном 11 нижней мертвой точки поводки 8 и 13 перемещаются в реверсивные ветви винтовых канавок 7 и 12 соответственно (ветви, имеющие обратный наклон), и ползуны 2 и 11, таким образом, меняют направление поступательного движения на противоположное. Цикл повторяется, вследствие чего вращательное движение ползуна 2 преобразуется в возвратно-поступательное движение дополнительного ползуна 11 с максимальной амплитудой.
При необходимости преобразования вращательного движения в возвратно-поступательное, с минимальной или нулевой амплитудой (при равенстве ходов винтовых канавок 7 и 12), ползун 2 за счет проворота вокруг его оси обоймы 9 с поводками 8 перемещается в нижнюю мертвую точку, а дополнительный ползун 11 остается в верхней мертвой точке (фиг. 3). При таком положении поводки 8 находятся в реверсивной ветви замкнутой винтовой канавки 7 ползуна 2, а поводки 13 в ветви прямого хода замкнутой винтовой канавки 12 дополнительного ползуна 11. В этом случае при приложении крутящего момента к ползуну 2 ползун 2 поступательно перемещается от нижней мертвой точки к верхней мертвой точке, а дополнительный ползун 11 - от верхней мертвой точки к нижней мертвой точке. Таким образом, амплитуды поступательного движения ползунов 2 и 11 будут вычитаться, и при их равенстве общая амплитуда возвратно-поступательного движения будет равна нулю. Ползуны 2 и 11 движутся в противофазе.
Проворот с помощью приводного элемента 10 обоймы 9 с зафиксированными в ней поводками 8 вокруг оси ползуна 2 от положения, обеспечивающего максимальную амплитуду возвратно-поступательного движения дополнительного ползуна 11, до положения, обеспечивающего нулевое значение его амплитуды, дает возможность плавно регулировать величину амплитуды возвратно-поступательного движения дополнительного ползуна 11.
Заключая, можно отметить, что введением новой совокупности существенных признаков достигается заявленный технический результат, вытекающий из современного уровня техники.
Изобретение относится к области машиностроения и может быть использовано в компрессорах и насосах. Устройство преобразования вращательного движения в возвратно-поступательное содержит корпус, ползун, приводной вал, дополнительный ползун, приводной элемент и обойму. На боковой поверхности ползуна выполнена замкнутая винтовая канавка, в которой утоплены поводки на половину их высоты. Вдоль оси ползуна размещен приводной вал, совершающий вращательное движение и передающий его ползуну через подвижное вдоль оси ползуна шлицевое соединение. Вторая половина поводков, размещенных в замкнутой винтовой канавке ползуна, выходящая за его пределы, зафиксирована в обойме, установленной в кольцевом пазу. Обойма кинематически связана с приводным элементом, обеспечивающим поворот и фиксацию обоймы с поводками относительно корпуса, что вызывает у ползуна, дополнительно к вращательному движению, возвратно-поступательное. На противоположном от приводного вала торце ползуна выполнена цилиндрическая полость, в которой с возможностью перемещения вдоль оси размещен дополнительный ползун, при этом на наружной цилиндрической поверхности дополнительного ползуна выполнена замкнутая винтовая канавка. Поворот дополнительного ползуна относительно корпуса ограничен шлицевым соединением. 1 з.п. ф-лы, 3 ил.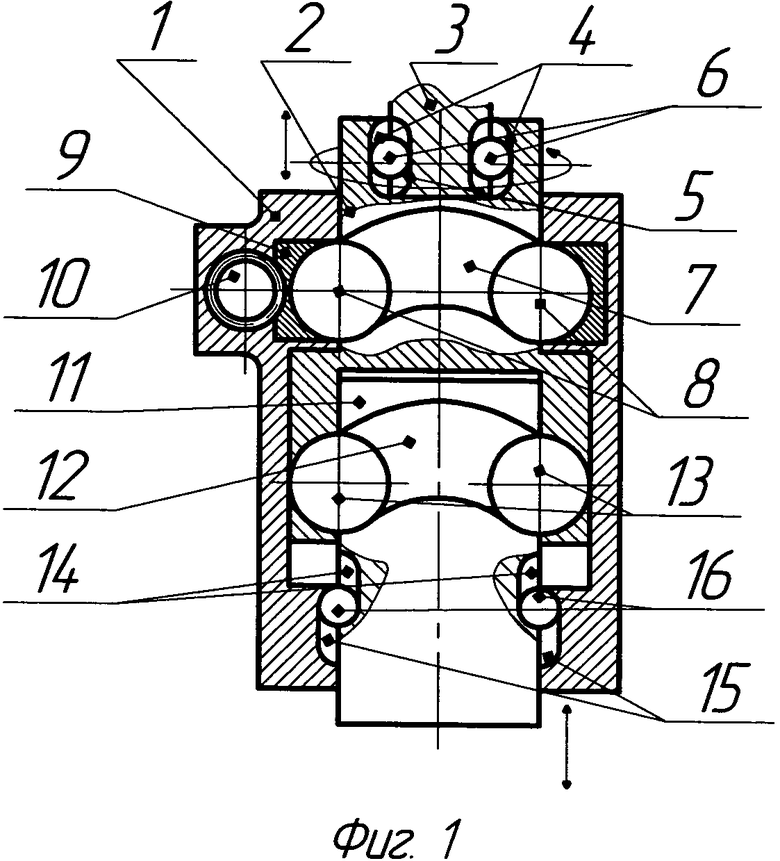
1. Устройство для преобразования вращательного движения в возвратно-поступательное, содержащее корпус, в котором установлен ползун, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, в которой утоплены поводки на половину их высоты, отличающееся тем, что вдоль оси ползуна размещен приводной вал, совершающий вращательное движение и передающий его ползуну через подвижное вдоль оси ползуна шлицевое соединение, вторая половина поводков, размещенных в замкнутой винтовой канавке ползуна, выходящая за его пределы, зафиксирована в обойме, установленной в кольцевом пазу, выполненном в корпусе, с возможностью проворота вокруг оси ползуна, при этом обойма кинематически связана с приводным элементом, обеспечивающим проворот и фиксацию обоймы с поводками относительно корпуса, что обеспечивает ползуну дополнительное возвратно-поступательное движение, на противоположном от приводного вала торце ползуна выполнена цилиндрическая полость, в которой с возможностью перемещения вдоль оси размещен дополнительный ползун, при этом на наружной цилиндрической поверхности дополнительного ползуна выполнена замкнутая винтовая канавка, аналогичная замкнутой винтовой канавке ползуна, в которой утоплены поводки, вторая половина которых, выходящая за пределы дополнительного ползуна, зафиксирована в первом ползуне, проворот дополнительного ползуна относительно корпуса ограничен подвижным в осевом направлении шлицевым соединением.
2. Устройство по п. 1, отличающееся тем, что приводной элемент обоймы с поводками может быть выполнен в виде зубчатой рейки, червяка, винта, кулачка.
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2005 |
|
RU2288392C1 |
| Высокочастотный керамический материал | 1950 |
|
SU108531A1 |
| US 3792616 A1, 19.02.1974 | |||
| US 20100254831 A1, 07.10.2010. | |||

