Заявляемое изобретение относится к области машиностроения, а более конкретно к устройствам преобразования вращательного движения в возвратно-поступательное и наоборот, и может быть использовано, например, в двигателях внутреннего сгорания, компрессорах, насосах.
Известен аксиально-поршневой двигатель с противоположно движущимися поршнями, (заявка № 2001105860 от 27.02.2003), содержащий корпус, вал, цилиндры, расположенные вокруг и параллельно оси вала, по два поршня с шатунами-поводками в каждом цилиндре, неподвижно закрепленные на валу две косые втулки и две качающиеся шайбы с радиальными цапфами, связанными шарнирно с шатунами-поводками, поршни имеют уплотнения с обоих торцов, а рабочие процессы двигателя совершаются как в объеме между поршнями с одной стороны, так и между торцевыми крышками цилиндров и поршнями с другой.
Недостатками аналога являются большие габариты вследствие наличия несовпадения оси приводного вала и оси цилиндров, повышенных габаритов механизма возвратно-поступательного движения поршней, а также снижение КПД механизма и его долговечности из-за давления поршней на стенки цилиндров и возникновения в нем неуравновешенных сил инерции.
Прототипом заявляемого изобретения является устройство преобразования вращательного движения в возвратно-поступательное и наоборот, патент RU № 2059133 С1, содержащее корпус, размещенный в нем ползун цилиндрической формы с замкнутой винтовой канавкой, кинематически связанное с ползуном и фиксированное от перемещения вдоль своей оси вращения тело вращения в виде маховика, кинематическая связь между ползуном и телом вращения выполнена в виде поводков, предназначенных для взаимодействия одной стороной с телом вращения, а другой стороной для взаимодействия с боковой поверхностью замкнутой винтовой канавки. Проворот ползуна относительно корпуса ограничен шлицевым соединением.
Прототип работает следующим образом. При приложении крутящего момента к маховику он начинает разворачиваться относительно своей оси, а зафиксированный в нем поводок начинает давить на боковую поверхность винтовой канавки, вследствие ограничения возможности проворота ползуна шлицевым соединением его с корпусом ползун начинает поступательное движение. После достижения ползуном крайнего положения происходит переход поводка в реверсивную ветвь винтовой канавки (ветвь, имеющую обратное направление) и ползун, таким образом, меняет направление движения на противоположное. Цикл повторяется, вследствие чего вращательное движение преобразуется в возвратно-поступательное. При обратном преобразовании движения возвратно-поступательного во вращательное усилие прикладывается к ползуну. При этом ползун боковой поверхностью винтовой канавки воздействует на поводок, закрепленный в маховике, что вызывает вращение маховика. При достижении ползуном крайнего положения за счет силы инерции вращательного движения маховика происходит переход поводка в реверсивную ветвь винтовой канавки и при изменении направления прикладываемой нагрузки на противоположное вращательное движение маховика продолжается в том же направлении.
Недостатком прототипа является возникновение при движении ползуна неуравновешенных сил инерции, что вызывает вибрацию механизма, снижает ресурс его работы, способствует возникновению дискомфорта при его эксплуатации, ограничивает скоростные характеристики механизма, а также область его применения.
Технической задачей заявляемого устройства является необходимость создания конструкции уравновешенного устройства преобразования вращательного движения в возвратно-поступательное и наоборот, имеющего возможность работы с большими скоростями вращательного и возвратно-поступательного движений, с низким уровнем вибрации, а также обладающего повышенным ресурсом работы.
Поставленная задача решается тем, что в устройстве содержащем корпус, в котором размещено тело вращения в виде маховика, фиксированное от смещения вдоль оси вращения, и ползун, установленный с возможностью возвратно-поступательного перемещения вдоль оси вращения, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, между ползуном и телом вращения размещен поводок, одна часть которого зафиксирована в маховике, а другая часть утоплена в винтовой канавке ползуна, проворот ползуна относительно корпуса ограничен шлицевым соединением, согласно изобретению вдоль оси вращения маховика оппозитно ползуну размещен дополнительный ползун, проворот которого относительно корпуса ограничен шлицевым соединением, на боковой поверхности дополнительного ползуна выполнена замкнутая канавка, соответствующая по форме замкнутой канавке первого ползуна, между дополнительным ползуном и маховиком размещен соответствующий поводок, одна часть которого зафиксирована в маховике, а другая часть утоплена в канавку ползуна, масса ползунов одинакова, при этом поводки основного и дополнительного ползунов зафиксированы в маховике со смещением, либо дополнительный ползун повернут таким образом, что при вращении маховика ползуны движутся в противоположные стороны.
Благодаря новой совокупности существенных признаков заявляемого изобретения получаем полностью внутренне динамически уравновешенный преобразователь движения. Это объясняется тем, что силы инерции, возникающие при поступательном движении ползунов, взаимно компенсируются вследствие их одинаковой массы, равных ускорений и движения их в противоположные стороны, а движение их вдоль одной оси исключает возникновение моментов сил инерции. Помимо этого в заявляемом устройстве исключаются осевые нагрузки в опорах маховика, что увеличивает ресурс работы преобразователя движения.
На чертеже схематично представлен вариант выполнения заявляемого устройства.
Заявляемое устройство содержит корпус 1, в котором установлен в подшипниках 2 маховик 3. В корпусе 1 также установлены цилиндрические ползуны 4 и 5, имеющие возможность перемещения вдоль оси маховика 3. При этом ось вращения маховика 3 совпадает с продольной осью ползунов 4 и 5. Проворот ползунов 4 и 5 относительно корпуса 3 ограничен шлицевыми соединениями, представляющими собой продольные пазы 6, 13 в ползунах 4 и 5 и корпусе 1, в которых утоплены шарики 7 и 8. На цилиндрической поверхности ползунов 4 и 5 выполнены замкнутые винтовые канавки 9 и 10 одинаковой формы, в которых утоплены поводки 11 и 12, зафиксированные в маховике 3. При этом места фиксации поводков расположены таким образом, что при вращении маховика ползуны 4 и 5 движутся в противоположные стороны.
Устройство работает следующим образом. Пусть исходно ползун 4 находится в крайнем правом положении, а ползун 5 в крайнем левом (см. чертеж). При приложении внешнего крутящего момента к маховику 3 он начинает вращательное движение в подшипниках 2. Зафиксированные в маховике 3 и погруженные в винтовые канавки 9 и 10 поводки 11 и 12 воздействуют на боковые поверхности винтовых канавок 9 и 10. Вследствие наличия наклона боковой поверхности винтовой канавки к плоскости, в которой происходит вращение поводков 11 и 12 и невозможности проворота ползунов 4 и 5 вокруг своей оси за счет шариков 7 и 8 возникает осевое усилие, вызывающее поступательное перемещение ползунов 4 и 5 вдоль оси вращения маховика. При этом вследствие того что поводки смещены по направлению вращения маховика 3 на 180°, ползун 4 начинает движение справа налево, а ползун 5 слева направо.
При достижении ползуном 4 крайнего левого положения, а ползуном 5 крайнего правого положения происходит переход поводков 11 и 12 на реверсивные ветви винтовых канавок, т.е. на ветви, имеющие обратное направление. Вследствие этого при продолжении вращательного движения маховика в первоначальном направлении ползуны 4 и 5 начинают возвратное движение: ползун 4 слева направо, а ползун 5 справа налево. После достижения ползунами 4 и 5 исходных положений цикл повторяется, т.е. происходит преобразование вращательного движения маховика 3 в возвратно-поступательное движение ползунов 4 и 5 в противоположных направлениях.
При преобразовании возвратно-поступательного движения во вращательное, т.е. при приложении нагрузки к ползунам 4 и 5, возникает давление боковых поверхностей винтовых канавок 9 и 10 на поводки 11 и 12, вследствие чего происходит проворот маховика 3, т.е. преобразуется поступательное движение ползунов во вращательное движение маховика.
Усилие, вызывающее поступательное движение, может прикладываться к обоим ползунам или к одному из них, менять свое направление в зависимости от направления движения ползунов, а также быть пульсирующим, однонаправленным, так как в этом случае возвратно-поступательное движение ползунов достигается силой инерции вращающегося маховика.
Таким образом, в заявляемом устройстве преобразования вращательного движения в возвратно-поступательное и наоборот вследствие обеспечения его конструкцией разнонаправленного движения ползунов, при котором ускорения ползунов на всех участках траекторий их движения равны по величине и направлены в противоположные стороны, при равенстве масс ползунов происходит полное уравновешивание сил инерции возвратно-поступательного движения ползунов.
Кроме того, при разнонаправленном приложении нагрузки к ползунам (двигатели внутреннего сгорания, насосы, компрессора) в заявляемом устройстве эти нагрузки будут взаимно компенсироваться, что исключает осевые нагрузки в опорах маховика, а следовательно, возрастает надежность и работоспособность устройства.
Противоположное движение ползунов, как уже отмечалось в примере, достигается смещением мест фиксации поводков в маховике, при этом угол смещения поводков по направлению вращения маховика зависит от числа витков винтовой канавки и равен 180°/n, где n - число витков канавки. Противоположное движение ползунов может быть получено и их проворотом относительно друг друга на угол 180°/n в плоскости вращения маховика в случае, если поводки зафиксированы в маховике в этой плоскости одинаково. Смещение мест фиксации поводков вдоль оси ползунов определяется величиной хода ползунов и их конструктивным исполнением.
Таким образом, за счет введения новой совокупности существенных признаков можно решить поставленную техническую задачу, вытекающую из современного уровня техники.
Изобретение относится к области машиностроения, в частности к устройствам преобразования вращательного движения в возвратно-поступательное и наоборот, и может быть использовано, например, в двигателях внутреннего сгорания, компрессорах, насосах. Заявленное изобретение содержит корпус, в котором размещено тело вращения в виде маховика, фиксированное от смещения вдоль оси вращения, и ползун, установленный с возможностью возвратно-поступательного перемещения вдоль оси вращения, на боковой поверхности ползуна выполнена замкнутая винтовая канавка, между ползуном и телом вращения размещен поводок, одна часть которого зафиксирована в маховике, а другая часть утоплена в замкнутой винтовой канавке ползуна, проворот ползуна относительно корпуса ограничен шлицевым соединением. Сущность заявленного изобретения заключается в том, что вдоль оси вращения маховика оппозитно ползуну размещен дополнительный ползун, аналогичный первому, при этом поводки основного и дополнительного ползунов зафиксированы в маховике со смещением, либо дополнительный ползун повернут таким образом, что при вращении маховика ползуны движутся в противоположные стороны. Технический результат заключается в полном уравновешивании сил инерции возвратно-поступательного движения ползунов. 2 з.п. ф-лы, 1 ил.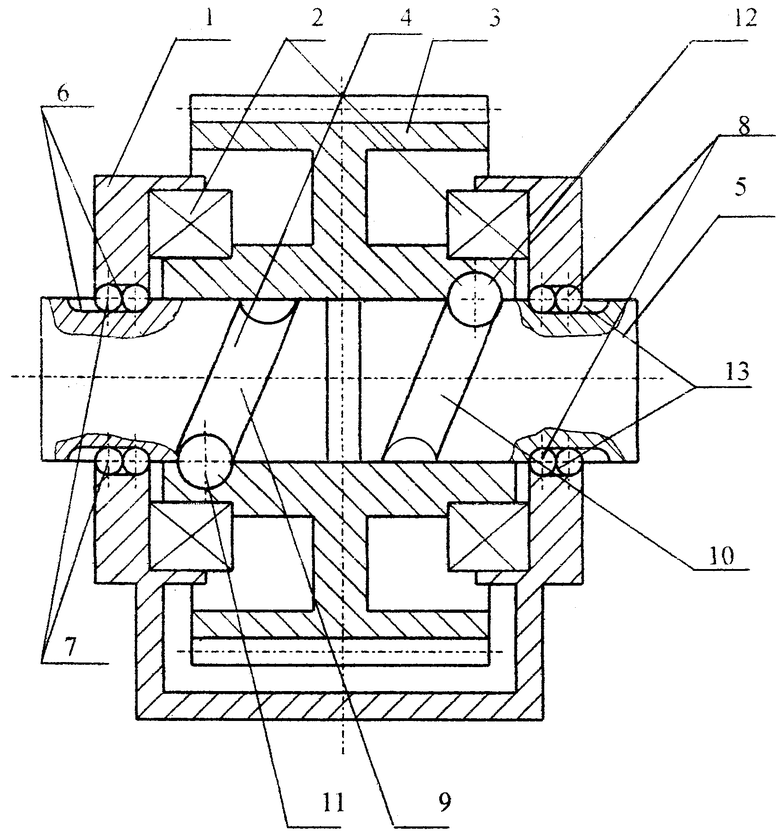
| RU 2059133 C1, 27.04.1996 | |||
| US 3792616, 19.02.1974 | |||
| DE 2902025 В1, 03.07.1980. |

