Изобретение относится к области электротехники и предназначено для диагностики и контроля состояния изоляции между листами электротехнической стали шихтованных сердечников электрических машин электромагнитным методом.
Наиболее надежным и удобным способом контроля сердечников является испытание электромагнитным методом при низких (до 0,1 Тл) значениях индукции переменного кольцевого магнитного потока. Известно устройство для контроля сердечников по этому методу [1]. В этом случае местные дефекты выявляются по величине и сдвигу фазы электромагнитного сигнала, порожденного токами, которые, в свою очередь, возникают в местах нарушения изоляции листов стали. Эти сигналы улавливаются чувствительным элементом датчика-сканера, представляющим собой катушку с ферромагнитным или немагнитным сердечником. Этим датчиком проводится сканирование всей рабочей поверхности испытуемого сердечника. Однако кроме величины сигнала при сканировании необходимо записывать аксиальную и тангенциальную координаты датчика, чтобы привязать обнаруженные дефекты к конкретному месту рабочей поверхности сердечника. Дискретная тангенциальная координата в виде номера сканируемого паза или зубца определяется вручную, а непрерывная аксиальная координата (текущее расстояние датчика от одного из торцов сердечника) записывается автоматически тем или другим техническим устройством.
Наиболее близким к предлагаемому способу измерения аксиальной координаты является способ, реализованный в устройстве, описанном в [2] (прототип). Здесь датчик снабжен системой определения аксиальной координаты, состоящей из зубчатого колеса и соосных свето- и фотодиода. В процессе перемещения датчика зубчатое колесо, связанное с ходовыми колесами датчика, вращается, его зубцы пересекают оптическую ось оптоэлектронной пары, вследствие чего по числу световых импульсов, преобразованных в электрические, специальное электронное устройство вычисляет координату - расстояние от датчика до одного из торцов сердечника, принятого за точку отсчета. Данное устройство достаточно сложно, содержит ряд электронных компонентов и в то же время не свободно от погрешностей, связанных с проскальзыванием ходовых колес при движении датчика по рабочей поверхности сердечника.
Для упрощения системы определения аксиальной координаты и повышения ее точности предлагается новый способ. Принцип, на котором он основан, поясняется на фиг.1. На этой фигуре цифрами обозначены:
1 - испытуемый сердечник;
2 - корпус сердечника;
3 - обмотка намагничивания;
4 - вольтметр.
Испытуемый сердечник 1 длиной L, помещенный в металлический корпус 2, охвачен обмоткой намагничивания 3. При подаче переменного напряжения на обмотку намагничивания по ней идет ток, порождающий в сердечнике кольцевой переменный магнитный поток. Если с помощью щупов подсоединить вольтметр 4 к противоположным торцам сердечника (точки «b» и «f» на фиг.1), то провода,крайние листы шихтованного сердечника и корпус образуют замкнутый контур V-a-b-c-d-e-f-g-V, в котором вышеуказанный переменный магнитный поток индуктирует некоторое калибровочное напряжение Е0 (разность потенциалов точек «b» и «f»), величина которого будет измерена вольтметром V. При этом обязательно провод, которым вольтметр соединяется с дальним от себя торцом, должен проходить внутри отверстия сердечника. Величина калибровочного напряжения определяется общеизвестной формулой

где f-частота переменного тока;
Qa - площадь поперечного сечения спинки сердечника;
Ва - амплитуда магнитной индукции в спинке сердечника. В свою очередь площадь поперечного сечения равна

Здесь ha - высота спинки сердечника;
L - длина сердечника;
kst - коэффициент заполнения шихтованного сердечника сталью. Подстановка (2) в (1) дает результат

Если перенести один из проводов из точки «b» в точку «Ах», находящуюся на некотором расстоянии «X» от одного из торцов, принятого за точку отсчета координат, то образуется новый замкнутый контур V-a-Ax-d-e-f-g-V. При этом вольтметр покажет новое значение напряжения Ех (разность потенциалов точек «Ах» и «f»), которое по аналогии с (3) может быть вычислено по формуле

Это выражение получено из (3) заменой величины L на X, что является справедливым, поскольку площадь поперечного сечения, охваченного данным контуром, линейно зависит от координаты «X». Сопоставляя (3) и (4), получаем окончательное выражение для определения координаты произвольной точки «Ах»:
Из этой формулы видно, почему напряжение Е0 названо калибровочным: его величина задает масштаб пересчета величины напряжения в величину координаты. Принцип пропорциональности аксиальной координаты некоторой точки на рабочей поверхности сердечника и напряжением между этой точкой и торцом сердечника удобно использовать при контроле сердечников электромагнитным методом для определения координаты датчика-сканера, поскольку сам этот метод предполагает создание в сердечнике переменного магнитного потока. В этом случае искомую координату определяют следующим образом: определяют калибровочное напряжение между торцами сердечника, определяют величину напряжения между местом расположения датчика и тем торцом, который принят за начало координат, а затем определяют координату датчика с помощью выражения (5).
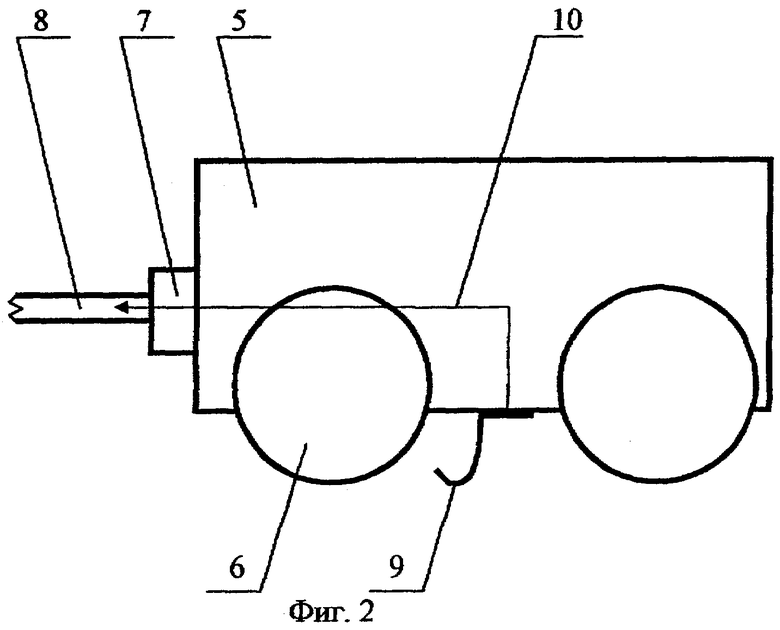
Пример устройства, практически реализующего предложенный способ, представлен на фиг.2. Здесь:
5 - датчик-сканер;
6 - ходовые колеса датчика;
7 - разъем;
8 - кабель, связывающий датчик с пультом управления (для упрощения не показан);
9 - скользящий электрический контакт;
10 - провод, по которому потенциал датчика передается в пульт управления.
Датчик-сканер 5 снабжен чувствительным элементом для улавливания сигналов в местах нарушения изоляции листов, органами управления и Контроля и ходовыми колесами 6 для перемещения по поверхности сердечника. Сигналы, принимаемые датчиком, передаются через разъем 7 по кабелю 8 в пульт управления. Кроме того, датчик снабжен электрическим контактом 9, прижимаемым в данном случае плоской пружиной к рабочей поверхности сердечника. Специальный провод 10 через разъем 7 и кабель 8 связывает этот контакт с пультом управления.
При перемещении датчика 5 по рабочей поверхности исследуемого сердечника вместе с сигналами с его чувствительного элемента в пульт управления все время передается значение потенциала на контакте 9, по которому с помощью специального блока измерения определяется координата датчика по формуле (5).
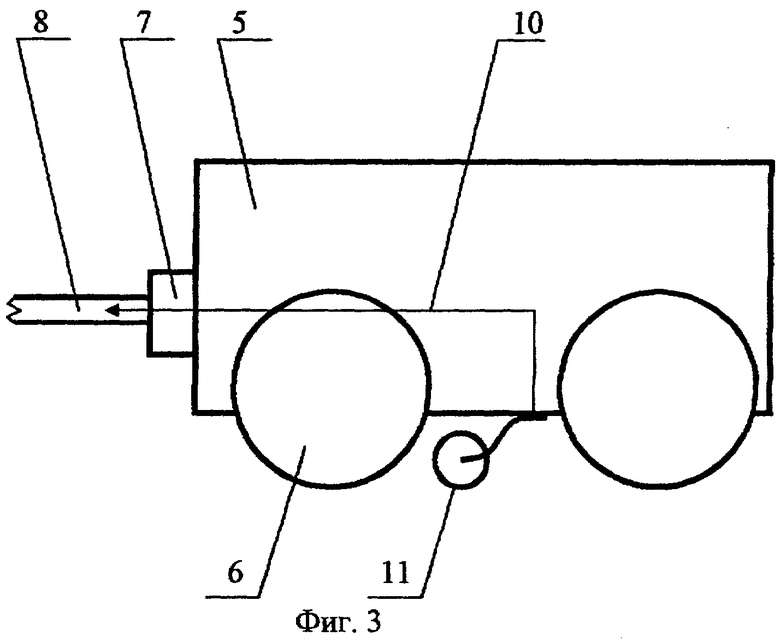
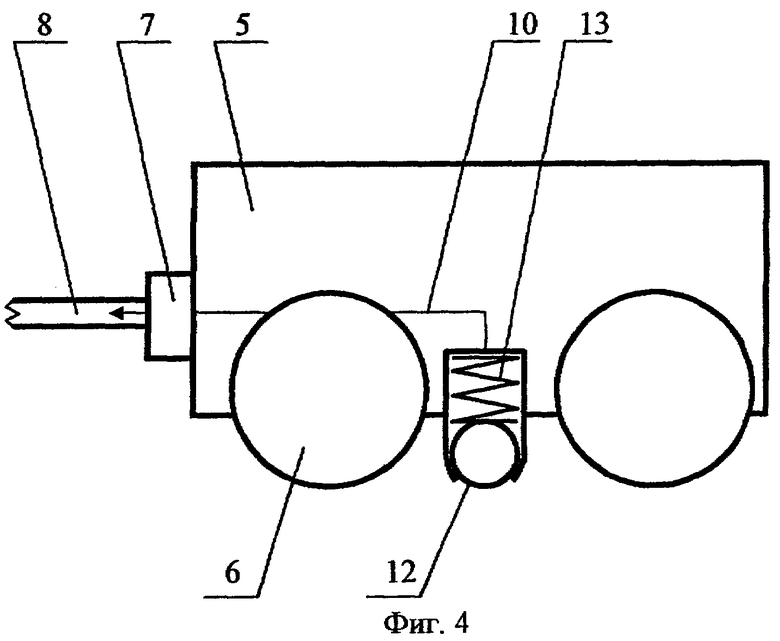
Электрический контакт может иметь различные конструктивные модификации. Так, на фиг.2 он выполнен в виде плоской изогнутой пружины 9, на фиг.3 показано выполнение контакта в виде металлического колеса 11, прижимаемого к рабочей поверхности испытуемого сердечника плоской пружиной, а на фиг.4 показан электрический контакт в виде шара 12, прижимаемого цилиндрической пружиной 13.
При любом способе выполнения контакта определение аксиальной координаты датчика весьма просто и не зависит от проскальзывания ходовых колес.
Источники информации
1. Патент РФ на изобретение №2082274, 09-08-1994.
2. Патент РФ на полезную модель №39717,14-04-2004 (прототип).
Способ предназначен для диагностики состояния изоляции между листами электротехнической стали шихтованных сердечников электрических машин электромагнитным методом. Датчик, контролирующий состояние изоляции листов сердечника, снабжают скользящим электрическим контактом, прижимаемым к рабочей поверхности контролируемого сердечника. Аксиальную координату датчика определяют по величине напряжения между скользящим контактом и торцом сердечника, выбранным за точку отсчета. Изобретение направлено на упрощение системы измерения координаты и повышение точности измерения. 2 н. п. ф-лы, 4 ил.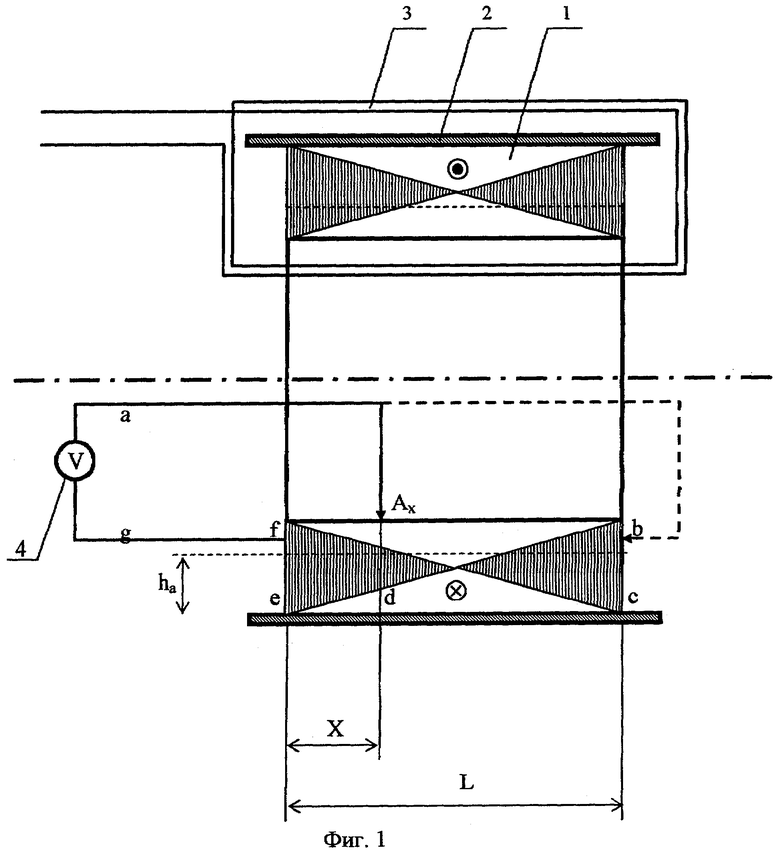

| Способ получения эмульсии для смазывания форм при хлебопечении | 1934 |
|
SU39717A1 |
| СПОСОБ КОНТРОЛЯ ЗАМЫКАНИЯ ЛИСТОВ АКТИВНОЙ СТАЛИ СЕРДЕЧНИКОВ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082274C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 4996486 А, 26.02.1991. | |||

