Изобретение относится к сканирующим устройствам для идентификации объектов и может быть использовано для считывания нанесенного на поверхность трубы клейма, например, в условиях цеха при ремонте труб.
Известно устройство для считывания клейма с поверхности трубы (US 4701869), включающее перемещаемую вдоль поверхности трубы оптическую головку, связанную с ЭВМ.
Недостатком указанного устройства является низкая точность считывания и получение искаженного изображения клейма.
Техническим результатом изобретения является повышение точности за счет исключения влияния неравномерности линейной скорости перемещения оптической головки вдоль поверхности трубы в направлении сканирования и получение неискаженного изображения клейма.
Указанный технический результат достигается тем, что в оптико-электронном устройстве для считывания клейма с трубы, содержащем связанную с ЭВМ оптическую головку, оптическая головка связана с ЭВМ через плату ввода изображения в ЭВМ и содержит два оптических канала, первый из которых содержит первый проекционный объектив с линейным увеличением Bet1, фокусным расстоянием f1, углом поля зрения tg W1 и относительной дисторсией δУоб1 во всем угле поля зрения и первую ПЗС линейку, расположенную вдоль оси трубы, а второй оптический канал содержит второй проекционный объектив с линейным увеличением Bet2, фокусным расстоянием f2, углом поля зрения tg W2 и относительной дисторсией δУоб2 во всем угле поля зрения и вторую ПЗС линейку, расположенную перпендикулярно оси трубы, причем выполняются условия:







 где
где
а - расстояние между площадками первой ПЗС линейки,
L - расстояние от оптической головки до трубы,
N1 и N2 - число элементов соответственно в первой и второй ПЗС линейках,
Дмах - ширина сканируемой области на поверхности трубы,
d2 - длина второй ПЗС линейки.
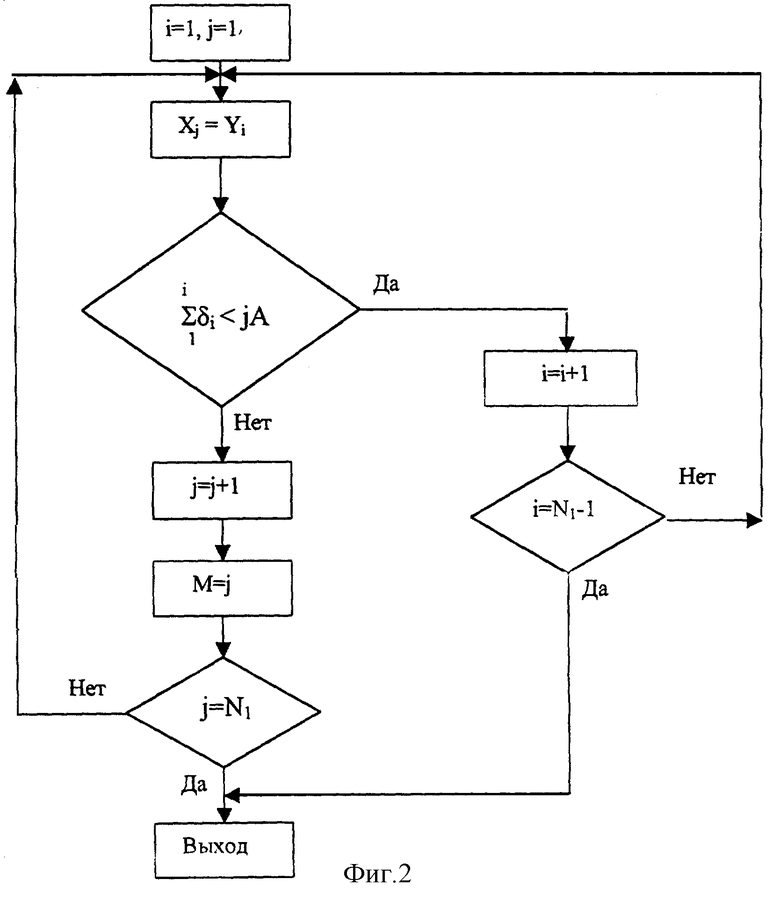
Сущность изобретения поясняется фиг.1 и фиг.2, на которых изображены соответственно вид сверху на трубу и оптическую головку и блок-схема алгоритма считывания.
Оптико-электронное устройство для считывания клейма с трубы содержит связанную с ЭВМ (не показана) через плату ввода изображения (не показана) оптическую головку 1 (ОГ), которая содержит два оптических канала. Первый канал содержит первый проекционный объектив 2 с линейным увеличением Bet1, фокусным расстоянием f1, углом поля зрения tg W1 и относительной дисторсией δУоб1 во всем угле поля зрения и первую ПЗС линейку 3, расположенную вдоль оси трубы 6, а второй оптический канал содержит второй проекционный объектив 4 с линейным увеличением Bet2, фокусным расстоянием f2, углом поля зрения tg W2 и относительной дисторсией δУоб2 во всем угле поля зрения и вторую ПЗС линейку 5, расположенную перпендикулярно оси трубы 6. ПЗС линейки работают синхронно и расположены под прямым углом. На первую линейку 3, ориентированную вдоль трубы 6, проецируется изображение участка поверхности трубы, на котором нанесено клеймо. При вращении трубы 6 через плату ввода изображение построчно считывается в компьютер, что позволяет получить полное развернутое изображение участка трубы. Изображение, полученное таким образом, является пропорциональным, т.к. шаг точек изображения вдоль трубы определяется только шагом светочувствительных элементов в линейке и увеличением объектива, а шаг точек изображения поперек оси трубы зависит от увеличения объектива, диаметра и скорости вращения трубы. Скорость же вращения в силу различных факторов непостоянна.
Для получения пропорционального изображения используется второй канал с ПЗС линейкой 5, ориентированной перпендикулярно оси трубы. Задача дополнительной линейки 5 - определить истинное расстояние между соседними строками в искаженном изображении, полученном с первой линейки 3. Для этого на линейку 5 проецируется увеличенное по сравнению с изображением для первой линейки 3 изображение поверхности трубы 6. При вращении трубы последовательные изображения линии, расположенной поперек оси трубы, получаемые со второй линейки 5, также вводятся в ЭВМ через плату ввода изображения.
Сигналы считываются с обеих линеек синхронно с частотой 50 Гц для исключения влияния ламп освещения.
Для получения пропорционального изображения поверхности трубы в программе на ЭВМ сначала определяются расстояния между основными строками изображения, считанного с первой линейки 3. Так как скорость вращения трубы 6 непостоянна и зависит от диаметра, то для получения пропорционального изображения необходимо определить сдвиг поверхности трубы за время считывания каждой строки. Это делается по анализу соседних изображений с ПЗС линейки 5. Изображения линии, расположенной поперек трубы, в соседних кадрах будут сдвинуты друг относительно друга на шаг между считываниями. Величина этого шага определяется корреляционным методом для каждых соседних строк изображения с линейки 5. После этого из непропорционального изображения с линейки 3 формируется пропорциональное изображение, в котором шаг между точками одинаков поперек и вдоль оси трубы.
В результате сканирования с первой ПЗС линейки 3 в ЭВМ с помощью специальной программы формируется матрица Yi непропорционального изображения поверхности трубы 6. После корреляционной обработки сигналов с линеек 3 и 5 определяется вектор AJ истинных расстояний δi между соседними строками Yi, при этом для получения матрицы Xi, содержащей М строк пропорционального изображения трубы, применяется алгоритм, приведенный на фиг.2. Параметр алгоритма А=a/Bet1.
Для получения клейма в виде последовательности букв и цифр полученное пропорциональное полутоновое изображение обрабатывается с помощью специальной программы методом пространственной корреляции с заранее известным изображением из базы данных. При состоянии базы данных для каждого символа из типового реального изображения выделяется прямоугольная область, которая соответствует изображению заданной буквы или цифры. Программа ЭВМ позволяет построчно вывести на дисплей или передать в ЭВМ верхнего уровня считанное клеймо в текстовом виде.
Выполнение в устройстве приведенных условий (1)-(8), характеризующих требования к параметрам проекционных объективов и ПЗС линеек, обеспечивает получение неискаженного изображения клейма, что повышает точность считывания информации, содержащейся в нанесенном на поверхности трубы клейме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ И КОНТРОЛЯ КРИВИЗНЫ ТРУБ | 2002 |
|
RU2224217C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЯ | 2004 |
|
RU2271073C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ИХ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ | 2018 |
|
RU2697822C2 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
| ПРОЕКЦИОННЫЙ ОБЪЕКТИВ | 1992 |
|
RU2044334C1 |
| УСТРОЙСТВО КОМПЬЮТЕРНОЙ СИСТЕМЫ ДЛЯ ТЕЛЕВИЗИОННОГО КРУГОВОГО ОБЗОРА ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ И ТРУБОПРОВОДОВ БОЛЬШОГО ДИАМЕТРА | 2014 |
|
RU2578193C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ КОЖНОГО РИСУНКА | 2003 |
|
RU2261475C2 |
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2006 |
|
RU2313116C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТИВОВ | 2004 |
|
RU2282170C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТОРСИИ ДЛИННОФОКУСНЫХ ОБЪЕКТИВОВ | 2004 |
|
RU2276778C1 |
Изобретение относится к системам идентификации объектов и может быть использовано для считывания нанесенного на поверхность трубы клейма, например, в условиях цеха при ремонте труб. Устройство содержит связанную через плату ввода изображения с ЭВМ оптическую головку (ОГ). ОГ содержит два оптических канала, первый из которых содержит первый проекционный объектив с линейным увеличением Bet1, фокусным расстоянием f1, углом поля зрения tg W1 и относительной дисторсией δУоб1 во всем угле поля зрения и первую ПЗС линейку, расположенную вдоль оси трубы, а второй оптический канал содержит второй проекционный объектив с линейным увеличением Bet2, фокусным расстоянием f2, углом поля зрения tg W2 и относительной дисторсией δУоб2 во всем угле поля зрения и вторую ПЗС линейку, расположенную перпендикулярно оси трубы, причем выполняются условия: Bet1=aN1/Дмах, Bet2>5Bet1, tgW1=Дмах/L, tgW2=0,2Дтр/L, aN1≤2f1 tgW1, d2≤2f2tgW2, δУоб1<1/N1, δУоб2<1/N2, где а - расстояние между площадками первой ПЗС линейки, L - расстояние от оптической головки до трубы, d2 - длина второй ПЗС линейки, N1 и N2 - число элементов соответственно в первой и второй ПЗС линейках, Дмах - ширина сканируемой области на поверхности трубы. Обеспечено повышение точности. 2 ил.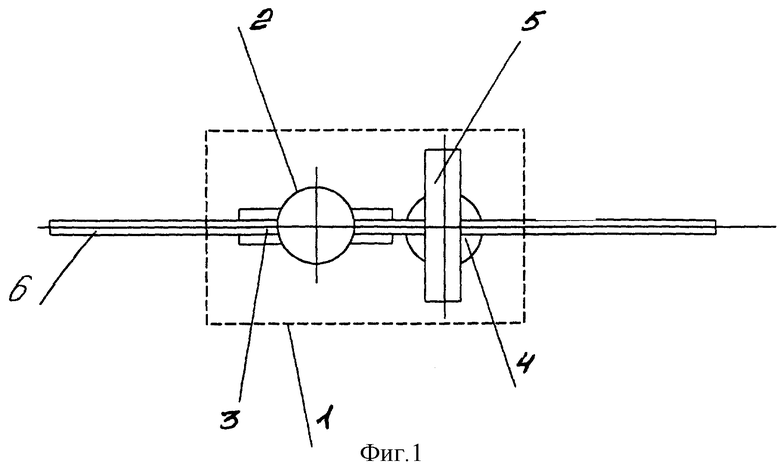
Оптико-электронное устройство для считывания клейма с трубы, содержащее связанную с ЭВМ оптическую головку, отличающееся тем, что оптическая головка связана с ЭВМ через плату ввода изображения в ЭВМ и содержит два оптических канала, первый из которых содержит первый проекционный объектив с линейным увеличением Bet1, фокусным расстоянием f1, углом поля зрения tg W1 и относительной дисторсией δУоб1 во всем угле поля зрения и первую ПЗС линейку, расположенную вдоль оси трубы, а второй оптический канал содержит второй проекционный объектив с линейным увеличением Bet2, фокусным расстоянием f2, углом поля зрения tg W2 и относительной дисторсией δУоб2 во всем угле поля зрения и вторую ПЗС линейку, расположенную перпендикулярно оси трубы, причем выполняются условия


где a - расстояние между площадками первой ПЗС линейки;
L - расстояние от оптической головки до трубы;
N1 и N2 - число элементов соответственно в первой и второй ПЗС линейках;
Дмах - ширина сканируемой области на поверхности трубы;
d2 - длина второй ПЗС линейки.
| US 4701869 А, 20.10.1987 | |||
| Способ сварки давлением с подогревом | 1976 |
|
SU610640A1 |
| RU 2000109264 А, 10.04.2002. | |||

