Предлагаемая система относится к области транспортировки жидкостей, газов и других продуктов с помощью трубопроводов, а именно к системам и устройствам для наблюдения за целостностью трубопроводов, расположенных на земной поверхности, и выявления мест их разрывов.
Известны системы и устройства для обнаружения места разрыва трубопровода (авт. свид. СССР №№642575, 723291, 1733837, 1818386; патенты РФ №№2135887, 2230978, патент Франции №2642818 и другие).
Из известных систем и устройств наиболее близкой к предлагаемой является система, реализующая "Способ обнаружения места разрыва трубопровода" (патент РФ №2135887, F 17 D 5/06, 1997), которая и выбрана в качестве прототипа.
Указанная система содержит трубопровод с разрывом, электропровод, проложенный рядом с трубопроводом, к которому подсоединяется один из концов электропровода, другой конец подсоединяется к другому проводу источника переменного напряжения. Система также содержит приемную станцию с антенной. При этом источник переменного напряжения выбирают с частотой, соответствующей генерации электромагнитных волн с длиной волны, близкой к размеру предполагаемого разрыва или диаметру трубопровода.
Однако известная система не обеспечивает оперативного обнаружения и определения местоположения разрыва магистрального трубопровода.
Технической задачей изобретения является повышение оперативности обнаружения и определения местоположения разрыва магистрального трубопровода путем облета его на вертолете.
Поставленная задача решается тем, что в системе для обнаружения места разрыва трубопровода, содержащей приемную радиостанцию и электропровод, проложенный рядом с трубопроводом и соединяющий двумя своими концами с концами трубопровода и источника переменного напряжения, приемная радиостанция размещена на борту вертолета и содержит последовательно включенные первую приемную антенну, первый усилитель высокой частоты, перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, узкополосный фильтр, первый фазометр, второй вход которого соединен с выходом опорного генератора, и блок регистрации, последовательно включенные вторую приемную антенну, второй усилитель высокой частоты, линию задержки, фазовый детектор. Второй вход которого соединен с выходом второго усилителя высокой частоты, и второй фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к второму входу блока регистрации, третий вход которого через измеритель дальности соединен с выходом второго усилителя высокой частоты, причем приемные антенны размещены на противоположных концах лопасти несущего винта вертолета, двигатель которого кинематически связан с несущим винтом и опорным генератором.
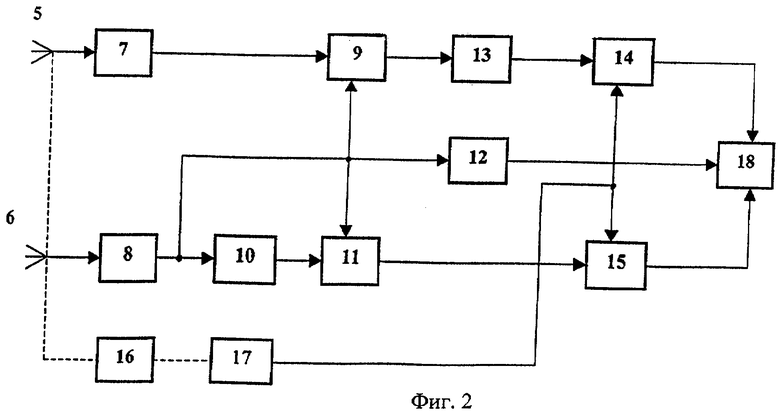
Расположение приемных антенн на вертолете показано на фиг.1. Структурная схема системы для обнаружения места разрыва трубопровода представлена на фиг.2.
Система содержит электропровод 3, проложенный рядом с трубопроводом 1 и соединенный двумя своими концами с концами трубопровода и источника 4 переменного напряжения.
Приемная радиостанция размещена на борту вертолета и содержит последовательно включенные первую приемную антенну 5, первый усилитель 7 высокой частоты, перемножитель 9, второй вход которого соединен с выходом усилителя 8 высокой частоты, узкополосный фильтр 13, первый фазометр 14, второй вход которого соединен с выходом опорного генератора 17, и блок 18 регистрации, последовательно включенные вторую приемную антенну 6, второй усилитель 8 высокой частоты, линию задержки 10, фазовый детектор 11, второй вход которого соединен с выходом опорного генератора 17, а выход подключен к второму входу блока 18 регистрации, третий вход которого через измеритель 12 дальности соединен с выходом усилителя 8 высокой частоты. Приемные антенны 5 и 6 размещены на противоположных концах лопастей несущего винта вертолета. Двигатель 16 кинематически связан с несущим винтом вертолета и опорным генератором 17.
Предлагаемая система работает следующим образом.
При установке открытого трубопровода 1 рядом с ним прокладывают электропровод 3, который подключен к одному из концов трубопровода 1. Другой конец подсоединяют к другому проводу источника 4 переменного напряжения. При отсутствии разрыва излучения электромагнитных волн не происходит. В случае появления разрыва трубопровод 1, место разрыва служит своеобразной антенной и начинает излучать электромагнитные волны с длиной волны, характерной размеру Д разрыва. Для определения характерного размера Д разрыва используется следующее соотношение между критической длиной волны излучения λкр и Д:
λкр=1,25 Д,
при котором происходит переход от экспоненциального затухания излучения в канале, образованном разрывом 2 в стене трубопровода 1, к пропусканию, обусловленному возможностью распространения основной волны в волноводном канале разрыва 2.
Если трубопровод заполнен средой с относительной диэлектрической проницаемостью ε, то соответствующая λкр частота излучения fкр определяется из выражения:
где с - скорость света в вакууме.
Это излучение принимается антеннами 5 и 6, размещенными на противоположных концах лопастей несущего винта вертолета:


где U1, U2 - амплитуды принимаемых электромагнитных колебаний;
fкр - критическая частота излучения;
R - радиус окружности, на которой расположены приемные антенны 5 и 6;
Ω=2πF - скорость вращения приемных антенн 5 и 6 (скорость вращения несущего винта вертолета);
β - пеленг на источник излучения электромагнитных колебаний (разрыв 2 трубопровода);
ϕ - угол относительно опорного фазового угла;
 - фаза принимаемого сигнала.
- фаза принимаемого сигнала.
Приемные антенны 5 и 6 перемещаются по окружности с постоянной скоростью V= ΩR на удалении Ro от источника излучения 2. За время приема электромагнитных колебаний от источника излучения антенны проходят путь L= ΩR.
Знаки "+" и "-" перед фазой Ψ(t) соответствуют диаметрально противоположным положениям антенн 5 и 6 на концах двух противоположных лопастей несущего винта вертолета.
Пеленгация источника излучения (разрыва 2 трубопровода) электромагнитных колебаний в горизонтальной (азимутальной) плоскости осуществляется дифференциально-фазовым методом с использованием обусловленной эффектом Доплера фазовой модуляции, возникающей при круговом вращении приемных антенн 5 и 6. При этом фаза огибающей модуляции сигналов зависит от направления на источник излучения.
Так как приемные антенны 5 и 6 то приближаются к источнику, то удаляются от него, возникает эффект Доплера, вызывающий пространственно-фазовую модуляцию принимаемых колебаний.
Причем величина
входящая в состав принимаемых колебаний и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы вращающихся приемных антенн. Пеленгатор тем чувствительнее к изменению угла β, чем больше относительный размер базы R/λкр, уменьшается значение угловой координаты β, при которой разность фаз превосходит значение 2π, то есть наступает неоднозначность отсчета. Следовательно, при  наступает неоднозначность отсчета угла β.
наступает неоднозначность отсчета угла β.
Устранение указанной неоднозначности путем уменьшения соотношения R/λкр обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λкр часто не удается из-за конструктивных соображений.
Следует отметить, что существующие вертолеты, например МИ-6, МИ-8, МИ-24, МИ-26, имеют лопасти длиной 10...20 м, число оборотов несущего винта 200 об/мин и могут совершать облет трубопровода на безопасной высоте 50...100 м.
Для повышения точности пеленгации разрыва 2 трубопровода в горизонтальной (азимутальной) плоскости приемные антенны размещаются на концах двух противоположных лопастей несущего винта вертолета. Смещение сигналов от двух диаметрально противоположных приемных антенн 5 и 6, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывает фазовую модуляцию, которая идентична фазовой модуляции, получаемой с помощью одной приемной антенны, вращающейся по кругу, радиус R1 которого в два раза больше (R1=2R).
Действительно, на выходе перемножителя 9 образуется гармоническое напряжение

где 
K1 - коэффициент передачи перемножителя;
с индексом фазовой модуляции
которое выделяется узкополосным фильтром 13 и поступает на первый вход фазометра 14, на второй вход которого подается напряжение опорного генератора 17

Опорный генератор 17 кинематически связан с двигателем 16 вертолета. Фазометр 14 обеспечивает точное измерение угла β, который фиксируется блоком 18 регистрации.
Для устранения неоднозначности отсчета азимута β необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λкр.
Решить эту задачу можно применением дифференциально-фазового пеленгатора, в котором измеряется разность фаз между напряжениями:


снимаемых с двух синхронно вращающихся с угловой скоростью Ω=2πF антенн 6 и 6 (5 и 5), сдвинутых между собой на угол μ (фиг.1). Индекс фазовой модуляции в этом случае определяется выражением

где  - расстояние между антеннами 5 и 5 (6 и 6).
- расстояние между антеннами 5 и 5 (6 и 6).
При d1<R индекс фазовой модуляции Δϕm2 оказывается меньше, чем у пеленгатора с одной вращающейся антенной 5 (5) и такой же измерительной базой
Однако при таком расположении антенн не устраняется фазовая модуляция, обусловленная непостоянством фазы принимаемого сигнала в течение интервала времени τ3.
Уменьшение индекса фазовой модуляции можно достигнуть и с одной вращающейся антенной 6 (5). При этом вместо напряжения u2'(t) необходимо использовать напряжение u2(t), задержанное на время τ3, эквивалентное сдвигу второй антенны 6 (5) на угол μ= Ωτ3.
В устройстве, реализующем предлагаемый способ, напряжение u2 (t) с выхода усилителя 8 высокой частоты поступает на автокоррелятор, состоящий из линии 10 задержки с временем задержки τ3 и фазового детектора 11. Это эквивалентно уменьшению индекса фазовой модуляции до величины
На выходе автокоррелятора образуется напряжение

где 
К2 - коэффициент передачи фазового детектора;
с индексом фазовой модуляции  которое поступает на первый вход фазометра 15, на второй вход которого подается напряжение uo(t) опорного генератора 17. Фазометр 15 обеспечивает однозначное измерение пеленга β на источник излучения. По существу фазометры 14 и 15 представляют собой две шкалы измерений угловой координаты β. Фазометр 14 представляет точную, но неоднозначную шкалу измерений, а фазометр 15 - грубую, но однозначную шкалу измерений.
которое поступает на первый вход фазометра 15, на второй вход которого подается напряжение uo(t) опорного генератора 17. Фазометр 15 обеспечивает однозначное измерение пеленга β на источник излучения. По существу фазометры 14 и 15 представляют собой две шкалы измерений угловой координаты β. Фазометр 14 представляет точную, но неоднозначную шкалу измерений, а фазометр 15 - грубую, но однозначную шкалу измерений.
Частоту сигнала, принимаемого движущейся антенной 5 (6), можно представить следующим образом:

где V= ΩR;
Ro - расстояние от источника излучения до винта.
При Rо≫R,

Доплеровское смещение частоты в секторе положений лопастей винта 0...40° составляет в среднем 0...2000 Гц. Величина (1) изменяется во времени. Разлагаем ее в ряд и ограничиваем двумя первыми членами:

где Ωt=αo.
Коэффициент α находится из геометрических соотношений (фиг.1):

r - расстояние между источником излучения и антенной 5 (6).
Определим разрешение двух источников (двух разрывов) по азимуту:
Период модуляции
Разрешение осуществляется на расстоянии, когда модулирующая функция изменяется на один период:

где L= ΩR.
Разрешающая способность по азимуту

где  - ширина диаграммы направленности бортовой антенны;
- ширина диаграммы направленности бортовой антенны;
d - предельный размер антенны, расположенной на лопасти винта.
Для определения дальности до источника излучения достаточно измерить крутизну функции (2) в окрестности точки х=0.
Пусть

Тогда

Максимальное и минимальное значения F достигаются в момент

и составляет

а максимальное значение

и достигается при

Разность моментов для соседних значений максимума и минимума является функцией дальности, а их полусумма - функцией азимута источника излучения.
Из (5) путем дифференцирования можно получить связь между ошибками измерения моментов максимума и минимума Δt и расстояния до источника излучения

Например, при r=1000 м -1=1.3·106; при r=500 м -1=3,3·105;
при r=100 м - 1=1,5·104; при r=50 м - 1=4,5·103; при r=20 м - 1=1,1·103.
Измерение дальности г осуществляется в измерителе 12 по результатам измерения интервалов времени, связанных с функцией модуляции частоты принимаемого электромагнитного колебания при вращении приемной антенны 6, расположенной на лопасти несущего винта. Измеренное значение дальности г фиксируется блоком 18 регистрации.
Местонахождение разрыва 2 трубопровода определяется с использованием измеренных значений азимута β и дальности г.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение оперативности обнаружения и определения местонахождения разрыва магистрального трубопровода. Это достигается за счет облета магистрального трубопровода на вертолете, на двух противоположных лопастях несущего винта которого размещены приемные антенны. Пассивная вертолетная система определения координат с размещением приемных антенн на двух противоположных лопастях несущего винта позволяет точно и однозначно измерить азимут β и дальность г до наземного источника излучения (разрыва трубопровода) с одной позиции. При этом для измерения азимута β используются две шкалы: точная, но неоднозначная и грубая, но однозначная. Разрешающая способность по азимуту определяется возможностями реализации искусственного раскрыва антенны и ограничивается длиной лопастей несущего винта вертолета. Измерение дальности г осуществляется по результатам измерения интервалов времени. Связанных с функцией модуляции частоты принятых электромагнитных колебаний, генерируемых разрывом трубопровода, при вращении приемных антенн, расположенных на двух противоположных лопастях несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТА РАЗРЫВА ТРУБОПРОВОДА | 2002 |
|
RU2230978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411476C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | 2009 |
|
RU2413250C1 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2000 |
|
RU2177437C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2444461C1 |
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
Изобретение относится к области транспортировки жидкости, газов и других продуктов с помощью трубопроводов, а именно к системам и устройствам для наблюдения за целостностью трубопроводов, расположенных на земной поверхности, и выявления мест их разрывов. Техническим результатом изобретения является повышение оперативности обнаружения и определение местоположения разрыва магистрального трубопровода путем облета его на вертолете. В системе для обнаружения места разрыва трубопровода, содержащей приемную радиостанцию и электропровод, проложенный рядом с трубопроводом и соединенный двумя своими концами с концами трубопровода и источника переменного напряжения, приемная радиостанция размещена на борту вертолета и содержит последовательно включенные первую приемную антенну, первый усилитель высокой частоты, перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, узкополосный фильтр, первый фазометр, второй вход которого соединен с выходом опорного генератора, и блок регистрации, последовательно включенные вторую приемную антенну, второй усилитель высокой частоты, линию задержки, фазовый детектор, второй вход которого соединен с выходом второго усилителя высокой частоты, и второй фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к второму входу блока регистрации, третий вход которого через измеритель дальности соединен с выходом второго усилителя высокой частоты, причем приемные антенны размещены на противоположных концах лопастей несущего винта вертолета, двигатель которого кинематически связан с несущим винтом и опорным генератором. 2 ил.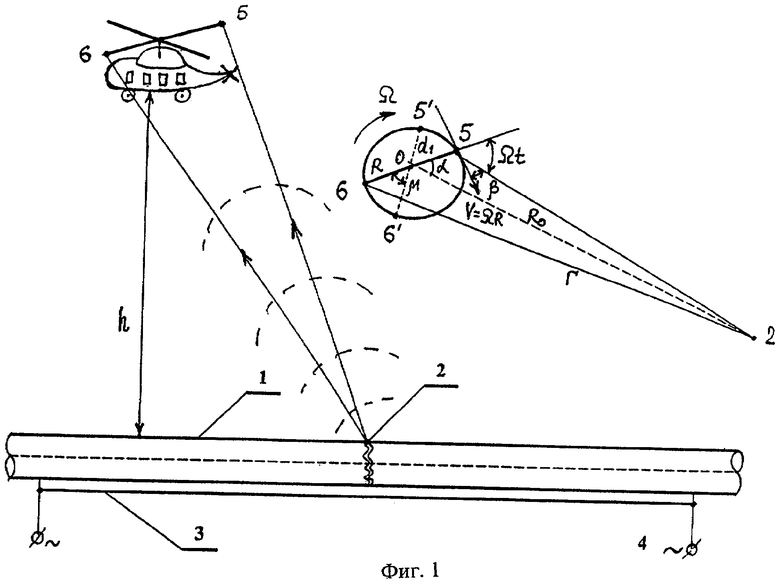
Система для обнаружения места разрыва трубопровода, содержащая приемную радиостанцию и электропровод, проложенный рядом с трубопроводом и соединенный двумя своими концами с концами трубопровода и источника переменного напряжения, отличающаяся тем, что приемная радиостанция размещена на борту вертолета и содержит последовательно включенные первую приемную антенну, первый усилитель высокой частоты, перемножитель, второй вход которого соединен с выходом второго усилителя высокой частоты, узкополосный фильтр, первый фазометр, второй вход которого соединен с выходом опорного генератора, и блок регистрации, последовательно включенные вторую приемную антенну, второй усилитель высокой частоты, линию задержки, фазовый детектор, второй вход которого соединен с выходом второго усилителя высокой частоты, и второй фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к второму входу блока регистрации, третий вход которого через измеритель дальности соединен с выходом второго усилителя высокой частоты, причем приемные антенны размещены на противоположных концах лопастей несущего винта вертолета, двигатель которого кинематически связан с несущим винтом и опорным генератором.
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТА РАЗРЫВА ТРУБОПРОВОДА | 1997 |
|
RU2135887C1 |

