Предлагаемая система относится к спасательным средствам и может быть использована для обнаружения человека, терпящего бедствие на воде, и определения его местоположения.
Известны спасательные системы и устройства (авт. свид. СССР №№385.819, 431.063, 637.298, 765.113, 988.655, 1.348.256, 1.505.840, 1.505.841, 1.588.636, 1.615.054, 1.643.325, 1.664.653; патенты РФ №№2.000.995, 2.009.956, 2.038.259, 2.043.259, 2.051.838, 2.177.437, 2.193.990, 2.276.038, 2.363.614; патенты США №№3.621.501, 4.889.511; патент Великобритании №1.145.051 и другие).
Из известных систем и устройств наиболее близкой к предлагаемой является система для обнаружения и определения местоположения человека, терпящего бедствие на воде (патент РФ №2.177.437, В63С 9/20, 2000), которая и выбрана в качестве прототипа.
Указанная система обеспечивает повышение надежности обнаружения человека, терпящего бедствие на воде, и определения его местоположения путем использования радиоизлучателя и вертолета. Для пеленгации источника излучения сигнала бедствия используется дифференциально-фазовый метод, который реализуется на борту вертолета. При этом приемные антенны размещаются на концах четырех противоположных лопастей несущего винта вертолета и вращающихся вокруг приемной антенны, размещенной над втулкой винта вертолета. Для повышения точности пеленгации радиоизлучателя (радиодатчика) приемные антенны размещаются на диаметрально противоположных концах лопастей несущего винта вертолета. Возникающая при этом неоднозначность пеленгации устраняется автокорреляционной обработкой принимаемых сигналов.
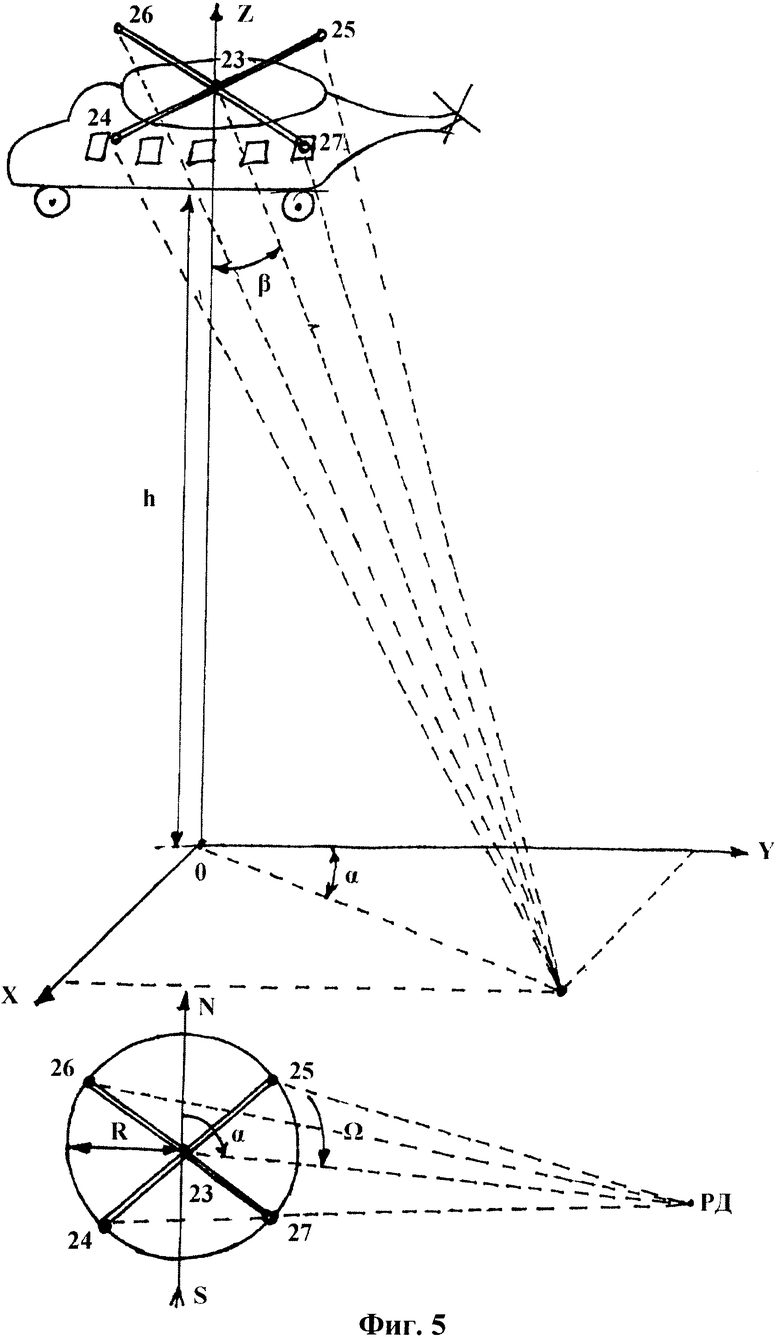
Местоположение источника излучения сигнала бедствия (радиодатчика) осуществляется с использованием измеренных значений азимута α, угла места β и высоты h полета вертолета.
Однако известная система не обеспечивает возможности для определения идентификационных данных человека, терпящего бедствие на воде.
Технической задачей изобретения является повышение надежности обнаружения и определения местоположения человека, терпящего бедствие на воде, путем использования сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая, в соответствии с ближайшим аналогом, спасательный жилет, надетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи, две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, два миниатюрных передатчика с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света и передатчика через размыкатели соединены с источником тока параллельно, и аппаратуру, установленную на борту вертолета и состоящую из одного измерительного и четырех пеленгационных каналов, при этом измерительный канал состоит из последовательно включенных приемной антенны, первого смесителя, второй вход которого соединен с выходом первого гетеродина, и усилителя первой промежуточной частоты, последовательно включенных второго гетеродина, шестого смесителя, усилителя второй промежуточной частоты, амплитудного детектора и блока регистрации, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены пятый перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, пятый узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены первая линия задержки, первый фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, к выходу третьего узкополосного фильтра последовательно подключены шестой перемножитель, второй вход которого соединен с выходом четвертого узкополосного фильтра, шестой узкополосный фильтр и третий фазометр, к выходу четвертого узкополосного фильтра последовательно подключены вторая линия задержки, второй фазовый детектор, второй вход которого соединен с выходом четвертого узкополосного фильтра, и четвертый фазометр, вторые входы фазометров соединены с выходом опорного генератора, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличается от ближайшего аналога тем, что она снабжена двумя анализаторами спектра, удвоителем фазы, делителем фазы на два, блоком сравнения, пороговым блоком, ключом, седьмым узкополосным фильтром и третьим фазовым детектором, причем каждый передатчик выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, и усилителя мощности, к выходу усилителя первой промежуточной частоты измерительного канала последовательно подключены удвоитель фазы, второй анализатор спектра, блок сравнения, второй вход которого через первый анализатор спектра соединен с выходом усилителя первой промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом усилителя первой промежуточной частоты, а выход подключен ко второму входу шестого смесителя, к выходу удвоителя фазы последовательно подключены делитель фазы на два, седьмой узкополосный фильтр и третий фазовый детектор, второй вход которого соединен с выходом ключа, а выход подключен ко второму входу блока регистрации.
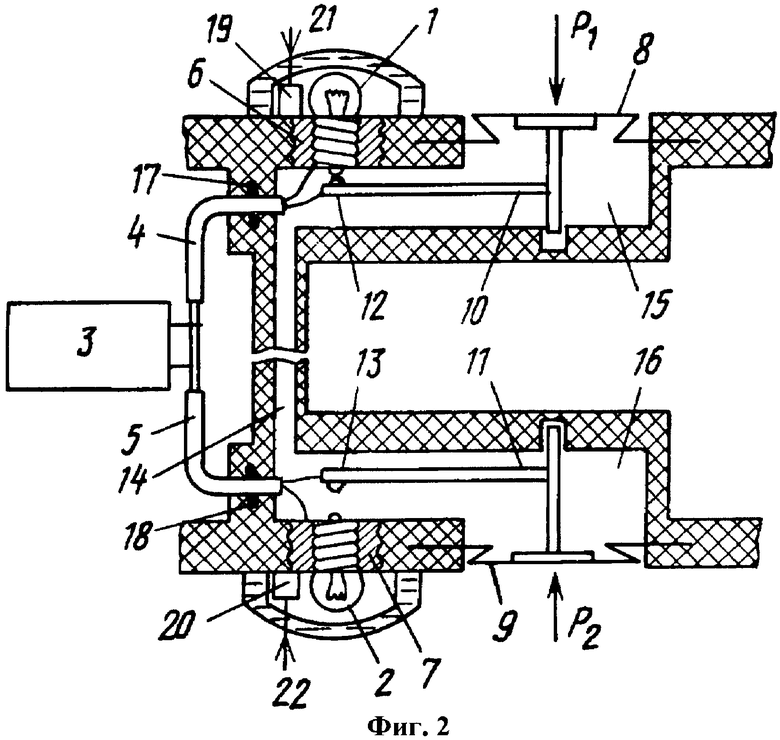
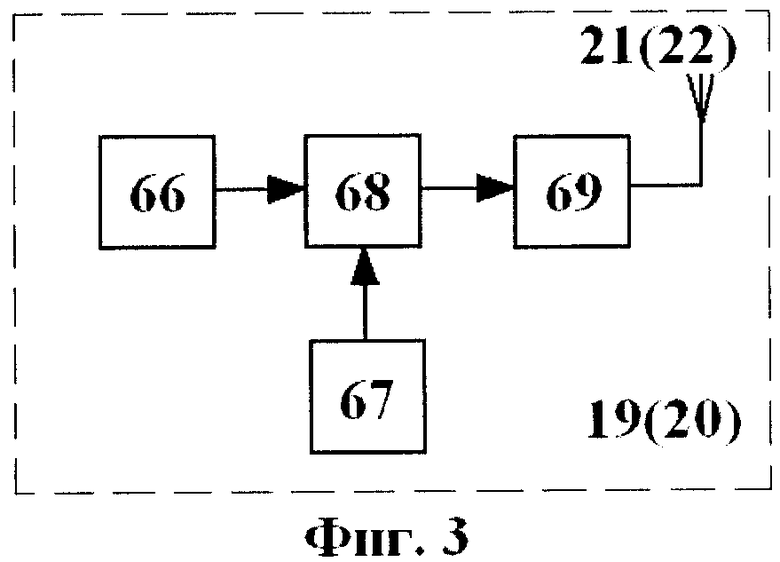
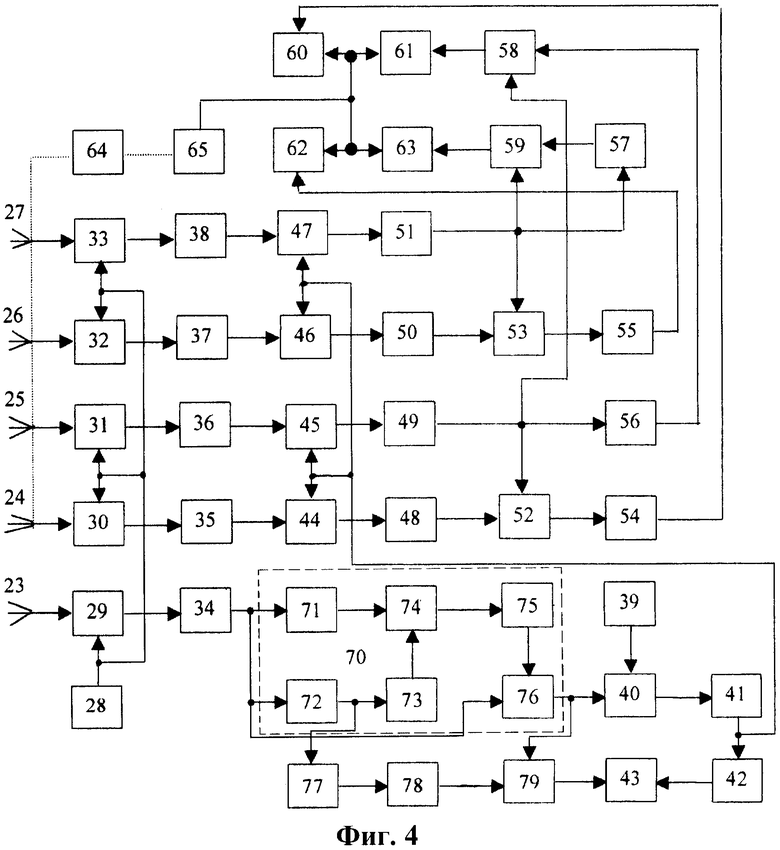
На фиг.1 схематично изображен спасательный жилет с источниками света 1, 2 и передатчиками 19, 20 с передающими антеннами 21, 22, надетый на человека; на фиг.2 - то же, разрез. Структурная схема передатчика 19 (20) представлена на фиг.3. Структурная схема аппаратуры, установленной на борту вертолета, представлена на фиг.4. Геометрическая схема расположения приемных антенн на вертолете и радиодатчика РД, размещенного на человеке, терпящем бедствие на воде, изображена на фиг.5.
Спасательный жилет состоит из источников света 1 и 2, источника 3 энергии, кабелей 4 и 5 подвода энергии к источникам света 1, 2 и передатчиками 19, 20 с передающими антеннами 21, 22, патронов 6 и 7, мембран 8, 9 и связанных с ними рычагов 10 и 11 с контактами 12 и 13, а также герметичной пневмомагистрали 14, связывающей герметичные воздушные полости 15 и 16. Места ввода кабелей 4 и 5 от источника энергии 3 в полости 15 и 16 загерметизированы уплотнительными кольцами 17 и 18. Источник света 1 и передатчик 19, источник света 2 и передатчик 20 подключены параллельно к источнику энергии 3.
Каждый передатчик 19 (20) содержит последовательно включенные задающий генератор 66, фазовый манипулятор 68, второй вход которого соединен с выходом генератора 67 псевдослучайной последовательности (ПСП), и усилитель 69 мощности, выход которого связан с передающей антенной 21 (22).
Аппаратура, размещаемая на борту вертолета, содержит измерительный канал и четыре пеленгационных канала. Измерительный канал состоит из последовательно включенных приемной антенны 23, смесителя 29, второй вход которого соединен с выходом первого гетеродина 28, усилителя 34 первой промежуточной частоты, удвоителя 72 фазы, второго анализатора спектра 73, блока 74 сравнения, второй вход которого через первый анализатор спектра 71 соединен с выходом усилителя 34 первой промежуточной частоты, порогового блока 75, ключа 76, второй вход которого соединен с выходом усилителя 34 первой промежуточной частоты, шестого смесителя 40, второй вход которого соединен с выходом второго гетеродина 39, усилителя 41 второй промежуточной частоты, амплитудного детектора 42 и блока 43 регистрации. К выходу удвоителя 72 фазы последовательно подключены делитель 77 фазы на два, седьмой узкополосный фильтр 78 и третий фазовый детектор 79, второй вход которого соединен с выходом ключа 76, а выход подключен ко второму входу блока 43 регистрации. Анализаторы спектра 71 и 73, удвоитель 72 фазы, блок 74 сравнения, пороговый блок 75 и ключ 76 образуют обнаружитель (селектор) 70 сложных фазоманипулированных (ФМн) сигналов.
Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 24 (25, 26, 27), смесителя 30 (31, 32, 33), второй вход которого соединен с выходом первого гетеродина 28, усилителя 35 (36, 37, 38) первой промежуточной частоты, перемножителя 44 (45, 46, 47), второй вход которого соединен с выходом усилителя 41 второй промежуточной частоты, и узкополосного фильтра 48 (49, 50, 51). К выходу первого узкополосного фильтра 48 последовательно подключены пятый перемножитель 52, второй вход которого соединен с выходом второго узкополосного фильтра 49, пятый узкополосный фильтр 54 и первый фазометр 60. К выходу второго узкополосного фильтра 49 последовательно подключены первая линия 56 задержки, первый фазовый детектор 58, второй вход которого соединен с выходом второго узкополосного фильтра 49, и второй фазометр 61. К выходу третьего узкополосного фильтра 50 последовательно подключены: шестой перемножитель 53, второй вход которого соединен с выходом четвертого узкополосного фильтра 51, шестой узкополосный фильтр 55 и третий фазометр 62. К выходу четвертого узкополосного фильтра 51 последовательно подключены вторая линия 57 задержки, второй фазовый детектор 59, второй вход которого соединен с выходом четвертого узкополосного фильтра 51, и четвертый фазометр 63. Вторые входы фазометров 60-63 соединены с выходом опорного генератора 65. Приемная антенна 23 измерительного канала размещена над втулкой винта вертолета, приемные антенны 24-27 пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель 64 кинематически связан с винтом вертолета и опорным генератором 65.
Система работает следующим образом.
В положении, показанном на фиг.1, давление окружающей среды Р2 на мембрану 9 больше, чем атмосферное давление Р1 на мембрану 8. Мембрана 9 находится в поджатом, мембрана 8 в отжатом состоянии. Соответственно рычаг 11 отжимает контакт 13 от источника 2 света и передатчика 22, а рычаг 10 поджимает контакт 12 к источнику 1 света и передатчику 19. Источник 1 света горит, передатчик 19 излучает сигнал бедствия, источник 2 света не горит, передатчик 20 не работает.
Если человек совершает поворот относительно горизонтальной оси на 180°, то тогда наверху оказываются источник 2 света и передатчик 20 с передающей антенной 22.
Давление среды на мембрану 8 становится больше, чем на мембрану 9, мембрана 8 поджимается, рычаг 10 размыкает контакт 12 с источником 1 света и передатчиком 19 с передающей антенной 21. Цепь разомкнута, источник 1 света гаснет, передатчик 19 выключается. Одновременно воздух из полости 15 перетекает через магистраль 14 в полость 16, мембрана 9 отжимается, рычаг 11 замыкает контакт 13 с источником 2 света и передатчиком 20 с передающей антенной 22. Источник 2 света загорается, а передатчик 20 излучает сигнал бедствия.
В ночное время и в хорошую погоду источник света может быть обнаружен визуально на значительном расстоянии. Однако в светлое время и в плохую погоду обнаружить источник света затруднительно.
Радиоизлучение является всепогодным и обеспечивает передачу сигнала бедствия на большие расстояния. При этом сигнал бедствия (SOS) излучается периодически с определенным периодом Тп длительностью Тс на определенной частоте wc, которая отводится специально для передачи сигнала бедствия и не занимается для передачи другой информации.
Приемная аппаратура размещается на борту вертолета.
Наличие вращающегося винта вертолета может быть использовано для определения направления на источник излучения сигнала бедствия (радиодатчик РД) с помощью устройства, антенны которого расположены на концах лопастей несущего винта.
Измерив углы направления на источник излучения сигнала бедствия α, β и зная высоту h полета, можно определить местоположение указанного источника (человека, терпящего бедствие на воде).
При включении передатчика 19 (20) задающим генератором 66 формируется высокочастотное колебание
Uc(t)=Uc·Cos(wct+φс), 0≤t≤Тс,
которое поступает на первый вход фазового манипулятора 68, на второй вход которого подается модулирующий код M(t) с выхода генератора 67 псевдослучайной последовательности (ПСП). На выходе фазового манипулятора 68 образуется сложный сигнал с фазовой манипуляцией (ФМн)
u'c(t)=Uc·Cos[wct+φк(t)+φс], 0≤t≤Тс,
где φк(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем φк(t)=const при кτ3<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2,…, N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=N·τэ),
который после усиления в усилителе 69 мощности поступает в передающую антенну 21 (22) и излучается ею в эфир. При этом модулирующий код M(t) является идентификационным номером человека, терпящего бедствие на воде, и содержит краткие сведения о нем, например фамилия, имя, отчество, год рождения, страна, фирма и т.д. Приемными антеннами 23-27 улавливаются следующие ФМн-сигналы:

 ,
,

 ,
,

где ±Δw - нестабильность несущей частоты сигналов, обусловленная различными дестабилизирующими факторами, в том числе и эффектом Доплера;
R - радиус окружности, на которой размещены приемные антенны 24-27;
Ω=2πR - скорость вращения приемной антенны 23 (скорость вращения несущего винта вертолета);
α, β - пеленг и угол места источника излучения сигнала бедствия;
λ - длина волны,
которые поступают на первые входы смесителей 29-33, на вторые входы которых подается напряжение первого гетеродина 28

Знаки «+» и «-» перед величинами 2πR/λcos(Ω-α) и 2πR/λcos(Ω-β) соответствуют диаметрально противоположным расположениям антенн 24 и 25, 26 и 27 на концах лопастей несущего винта вертолета относительно приемной антенны 23, размещенной над втулкой винта вертолета.
На выходах смесителей 29-33 образуются напряжения комбинационных частот. Усилителями 34-38 выделяются напряжения первой промежуточной частоты:

 ,
,

 ,
,

где  ;
;
wup1=wc-wг1 - первая промежуточная частота;
φup1=φc-φг1,
К1 - коэффициент передачи смесителей.
Напряжение uup1(t) с выхода усилителя 34 первой промежуточной частоты поступает на вход обнаружителя (селектора) 70 ФМн-сигналов, состоящего из анализаторов 71 и 73 спектра, удвоителя 72 фазы, блока 74 сравнения, порогового блока 75 и ключа 76. При этом на выходе удвоителя 72 фазы образуется гармоническое колебание
uup6(t)=Uup6·Cos[2(wup1±Δw)t+2φup1], 0≤t≤Тс,
где  ;
;
К2 - коэффициент передачи перемножителя.
В качестве удвоителя 72 фазы может использоваться перемножитель, на два входа которого подается одно и то же напряжение uup1(t). Так как 2φK(t)={0, 2π}, то в гармоническом колебании фазовая манипуляция уже отсутствует.
Ширина спектра Δf2 гармонического колебания (второй гармоники сигнала) определяется длительностью сигнала
Δf2=1/Tc,
а ширина спектра Δfc ФМн-сигнала определяется длительностью τэ элементарных посылок
Δfc=1/τэ.
Следовательно, при удвоении фазы сложного ФМн-сигнала его ширина спектра сворачивается в N раз
Δfc/Δf2=N.
Это обстоятельство позволяет обнаружить сложный ФМн-сигнал среди других сигналов и помех даже тогда, когда отношение сигнал/шум на входе приемника меньше единицы.
Напряжения U1 и U2, пропорциональные Δfc и Δf2 соответственно с выходов анализаторов спектра 71 и 73, поступают на два входа блока 74 сравнения. Так как U1>>U2, то на выходе блока 74 сравнения образуется постоянное напряжение, которое превышает пороговый уровень Uпор в пороговом блоке 75. Пороговый уровень Uпop выбирается таким, чтобы его не превышали случайные помехи.
При превышении порогового уровня Uпор в пороговом блоке 75 формируется постоянное напряжение, которое поступает на управляющий вход ключа 76, открывая его. В исходном состоянии ключ 76 всегда закрыт. При этом напряжение uup1(t) с выхода усилителя 34 первой промежуточной частоты через открытый ключ 76 поступает на первый вход смесителя 40, на второй вход которого подается напряжение второго гетеродина 39
uг2(t)=Uг2·Cos(wг2t+φг2).
На выходе смесителя 40 образуются напряжения комбинационных частот. Усилителем 41 выделяется напряжение второй промежуточной частоты

где  ;
;
wup2=wup1-wг2 - вторая промежуточная частота;
φup7=φup1-φг2,
которое после детектирования в амплитудном детекторе 42 поступает на первый вход блока 43 регистрации и тем самым фиксирует факт обнаружения источника радиоизлучения (человека, терпящего бедствие на воде).
Напряжение uup1(t) с выхода усилителя 34 первой промежуточной частоты через открытый ключ 74 одновременно поступает на первый (информационный) вход фазового детектора 79.
Напряжение uup6(t) с выхода удвоителя 72 фазы поступает на вход делителя 77 фазы на два, на выходе которого образуется гармоническое колебание

которое выделяется узкополосным фильтром 78, используется в качестве опорного напряжения и подается на второй (опорный) вход фазового детектора 79. В результате синхронного детектирования на выходе фазового детектора 79 образуется низкочастотное напряжение
uн(t)=Uн·Cos·φк(t), 0≤t≤Tc,
где  ;
;
К3 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду M(t), которое фиксируется блоком 43 регистрации.
Напряжение uup7(t) второй промежуточной частоты с выхода усилителя 41 второй промежуточной частоты поступает одновременно на вторые входы перемножителей 44-47, на первые входы которых подаются напряжения uup2(t)-uup5(t). На выходах перемножителей 44-47 образуются следующие напряжения:
 ,
,
 ,
,
 ,
,

где  ;
;
K2 - коэффициент передачи перемножителей,
которые выделяются узкополосными фильтрами 48-51.
Следовательно, полезная информация об углах α и β переносится на стабильную частоту wг2 второго гетеродина 39. Поэтому нестабильность несущей частоты принимаемых сигналов бедствия, вызванная различными дестабилизирующими факторами, не влияет на результат пеленгации, тем самым повышается точность определения местоположения источника радиоизлучений.
Причем величина Δφm=2πR/λ, входящая в состав указанных колебаний и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы вращающихся антенн 24-27 относительно фазы антенны 23. Пеленгатор тем чувствительнее к изменению углов α и β, чем больше относительный размер баз R/λ. Однако с ростом R/λ уменьшаются значения угловых координат α и β, при которых разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета.
Следовательно, при R/λ<1/2 наступает неоднозначность отсчета углов α и β. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ часто не удается из-за конструктивных соображений.
Для повышения точности пеленгации радиодатчика РД в горизонтальной (азимутальной) и вертикальной (угломестной) плоскостях приемные антенны 24 и 25, 26 и 27 располагаются на концах четырех противоположных лопастей несущего винта вертолета. Смещение сигналов от четырех диаметрально противоположных приемных антенн 24 и 25, 26 и 27, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывает фазовую модуляцию, которая идентична фазовой модуляции, получаемой с помощью двух приемных антенн, вращающихся по кругу, радиус R1 которых в два раза больше (R1=2R).
Действительно, на выходе перемножителей 52 и 53 образуются гармонические напряжения:
u10(t)=U10·Cos(Ω-α),
u11(t)=U10·Cos(Ω-β), 0≤t≤Tc,
где  ;
;
с индексом фазовой модуляции Δφm1=2πR1/λ(R1=2R), которые выделяются узкополосными фильтрами 54 и 55 соответственно и поступают на первый вход фазометров 60 и 62, на второй вход которых подается напряжение опорного генератора 65
u0(t)=U0·CosΩt.
Фазометры 60 и 62 обеспечивают точное измерение угловых координат α и β.
Для устранения возникающей при этом неоднозначности отсчета углов α и β необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ.
Это достигается использованием двух автокорреляторов, каждый из которых состоит из линии задержки 56 (57) и фазового детектора 58 (59), что эквивалентно уменьшению индекса фазовой до величины Δφm2=2πd1/λ, где d1<R.
На выходе автокорреляторов образуются напряжения:
u12(t)=U12·Cos(Ω-α),
u13(t)=U12·Cos(Ω-β), 0≤t≤Tc
где  ;
;
К3 - коэффициент передачи фазовых детекторов,
с индексом фазовой модуляции Δφm2=2πd1/λ, которые поступают на первый вход фазометров 61 и 63, на второй вход которых подается напряжение U0(t) с выхода опорного генератора 65. Фазометры 61 и 63 обеспечивают однозначное измерение угловых координат α и β. По существу фазометры представляют собой две шкалы измерений. Фазометры 60 и 62 представляют собой точные, но неоднозначные шкалы измерений угловых координат α и β, а фазометры 61 и 63 - грубые, но однозначные шкалы измерений угловых координат α и β.
Зная высоту h полета вертолета и измерив угловые координаты α и β, можно точно и однозначно определить местонахождение источника излучения сигнала бедствия (человека, терпящего бедствие на воде).
Бортовая аппаратура, установленная на вертолете, инвариантна к нестабильности несущей частоты принимаемых сигналов, так как пеленгация источника излучения сигнала бедствия осуществляется на стабильной частоте wг2 второго гетеродина 39. Бортовая аппаратура также инвариантна к виду модуляции принимаемых сигналов, если сигналы бедствия имеют модуляцию (манипуляцию) одного из параметров.
Для пеленгации источника излучения сигнала бедствия используется дифференциально-фазовый метод, который реализуется на борту вертолета. При этом приемные антенны 24-27 размещаются на концах четырех противоположных лопастей винта вертолета и вращающихся вокруг приемной антенны 23, размещенной над втулкой винта вертолета. Для повышения точности пеленгации радиоизлучателя (радиодатчика) приемные антенны размещаются на диаметрально противоположных концах лопастей винта вертолета. Возникающая при этом неоднозначность пеленгации устраняется автокорреляционной обработкой принимаемых сигналов. Измеряются угловые координаты α и β с помощью четырех фазометров 60-63. При этом фазометры 60 и 62 образуют точные, но неоднозначные шкалы измерений угловых координат α и β соответственно, а фазометры 61 и 63 образуют грубые, но однозначные шкалы измерений угловых координат α и β соответственно.
Местоположение источника излучения сигнала бедствия (радиодатчика) осуществляется с использованием измеренных значений азимута α, угла шесть β и высоты h полета вертолета.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение надежности обнаружения и определения местоположения человека, терпящего бедствие на воде. Это достигается использованием сложных сигналов с фазовой манипуляцией.
Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
Сложные ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Опорное напряжение, необходимое для синхронного детектирования сложных ФМн-сигналов, выделяется непосредственно из самого принимаемого ФМн-сигнала, при этом имеется возможность получать полную информацию о человеке, терпящем бедствие на воде.
Бортовая аппаратура, установленная на вертолете, инвариантна не только к нестабильности несущей частоты принимаемых ФМн-сигналов, но и к фазовой манипуляции, что повышает точность фазовой пеленгации человека, терпящего бедствие на воде.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2009 |
|
RU2418714C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2011 |
|
RU2458815C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2007 |
|
RU2355599C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2000 |
|
RU2177437C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2448017C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2005 |
|
RU2299832C1 |
Изобретение относится к спасательным средствам. Система для обнаружения и определения местоположения человека, терпящего бедствие на воде, содержит спасательный жилет, надеваемый на человека, и аппаратуру, размещаемую на борту вертолета. Спасательный жилет содержит источники света (1) и (2), источник (3) энергии, кабели (4) и (5), патроны (6) и (7), мембраны (8) и (9), рычаги (10) и (11), контакты (12) и (13), герметичную пневмомагистраль (14), полости (15) и (16), уплотнительные кольца (17) и (18), передатчики (19) и (20), передающие антенны (21) и (22). Каждый передатчик содержит задающий генератор (66), генератор (67) псевдослучайной последовательности (ПСП), фазовый манипулятор (68) и усилитель (69) мощности. Аппаратура, размещаемая на борту вертолета, содержит приемные антенны (23-27), гетеродины (28) и (39), смесители (22-33, 40), усилители (34-38) первой промежуточной частоты, усилитель (41) второй промежуточной частоты, амплитудный детектор (42), блок (43) регистрации, перемножители (44-47, 52, 53), узкополосные фильтры (48-51, 54, 55, 78), линии задержки (56, 57), фазовые детекторы (58, 59, 79), фазометры (60-63), двигатель (64), опорный генератор (65), обнаружитель (селектор) (70) ФМн-сигналов, анализаторы спектра (71, 73), удвоитель фазы (72), блок (74) сравнения, пороговый блок (75), ключ (76), делитель (77) фазы на два. Повышается надежность обнаружения и определения местоположения человека, терпящего бедствие на воде, путем использования сигналов с фазовой манипуляцией. 5 ил.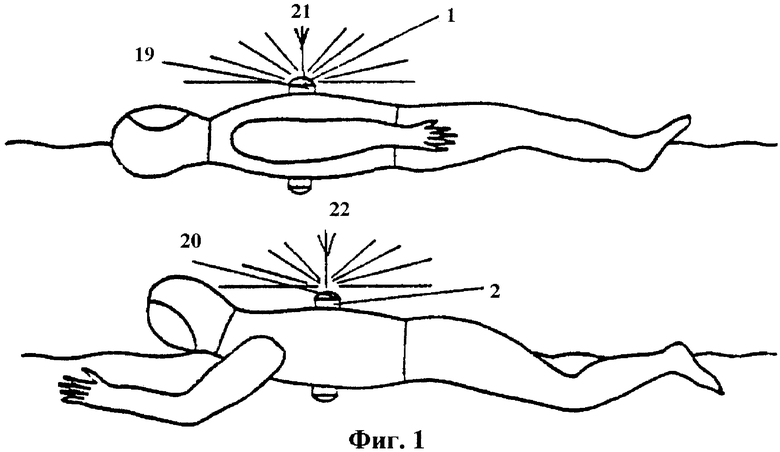
Система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, надетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи, две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, два миниатюрных передатчика с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света и передатчики через размыкатели соединены с источником тока параллельно, и аппаратуру, установленную на борту вертолета и состоящую из одного измерительного и четырех пеленгационных каналов, при этом измерительный канал состоит из последовательно включенных приемной антенны, первого смесителя, второй вход которого соединен с выходом первого гетеродина, и усилителя первой промежуточной частоты, последовательно включенных второго гетеродина, шестого смесителя, усилителя второй промежуточной частоты, амплитудного детектора и блока регистрации, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены пятый перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, пятый узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены первая линия задержки, первый фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, к выходу третьего узкополосного фильтра последовательно подключены шестой перемножитель, второй вход которого соединен с выходом четвертого узкополосного фильтра, шестой узкополосный фильтр и третий фазометр, к выходу четвертого узкополосного фильтра последовательно подключены вторая линия задержки, второй фазовый детектор, второй вход которого соединен с выходом четвертого узкополосного фильтра, и четвертый фазометр, вторые входы фазометров соединены с выходом опорного генератора, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором, отличающаяся тем, что она снабжена двумя анализаторами спектра, удвоителем фазы, делителем фазы на два, блоком сравнения, пороговым блоком, ключом, седьмым узкополосным фильтром и третьим фазовым детектором, причем каждый передатчик выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, и усилителя мощности, к выходу усилителя первой промежуточной частоты измерительного канала последовательно подключены удвоитель фазы, второй анализатор спектра, блок сравнения, второй вход которого через первый анализатор спектра соединен с выходом усилителя первой промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом усилителя первой промежуточной частоты, а выход подключен ко второму входу шестого смесителя, к выходу удвоителя фазы последовательно подключены делитель фазы на два, седьмой узкополосный фильтр и третий фазовый детектор, второй вход которого соединен с выходом ключа, а выход подключен ко второму входу блока регистрации.
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2000 |
|
RU2177437C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2005 |
|
RU2299832C1 |
| Жидкостный ракетный двигатель с беспоршневым пневмонасосным агрегатом | 2016 |
|
RU2638705C1 |
| US 5860842 A, 19.01.1999 | |||
| DE 4311473 A1, 13.10.1994. | |||

