Описываемое предлагаемое изобретение относится к способам выработки углов наведения пусковой установки приборами управления стрельбой (УН ПУ ПУС) противолодочным ракетным (бомбовым) оружием.
Известен способ выработки УН ПУ ПУС для стрельбы реактивными глубинными бомбами (РГБ), включающий определение координат и параметров движения подводной цели (КПДЦ), решение задачи встречи РГБ с целью в упрежденной точке, учитывающей воздушный участок траектории РГБ и участок свободного погружения на заданную глубину погружения цели [1].
Известен способ наведения носителя на цель оптической головкой самонаведения (ОГС) в режиме ее автосопровождения на конечном участке траектории движения носителя, включающий определение координат индицируемых в поле зрения ОГС точек цели, формирование матрицы координат, идентификацию цели с одной из точек контура изображения цели и формирование в соответствии с координатами этой точки сигналов автосопровождения цели и управления носителем [2].
К недостаткам указанных способов выработки УН ПУ ПУС для их применения при стрельбе ракетами 90Р в упрежденное место цели относится отсутствие учета влияния скорости цели на вероятность ее догона гравитационным подводным снарядом (ГПС), а значит, и на вероятность поражения цели.
Задачей изобретения является повышение вероятности поражения подводной цели при стрельбе ракетами 90Р в упрежденное место цели.
Технический результат достигается благодаря тому, что в отличие от способа-прототипа [1], включающего определение КПДЦ, решение задачи встречи ракеты с целью в упрежденной точке, учитывающей воздушный участок траектории ракеты и участок ее погружения на заданную глубину погружения цели, дополнительно предлагается учет возможностей ГПС по догону маневрирующей цели, определение области догона и стрельба в ее центр (фиг.4), осуществляемая выработкой ПУС требуемой корректуры УН ПУ (фиг.5). В отличие от способа-прототипа [2] предлагается способ наведения не самого носителя на конечном участке самонаведения, а только пусковой установки для стрельбы ракетами на неуправляемом участке траектории.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
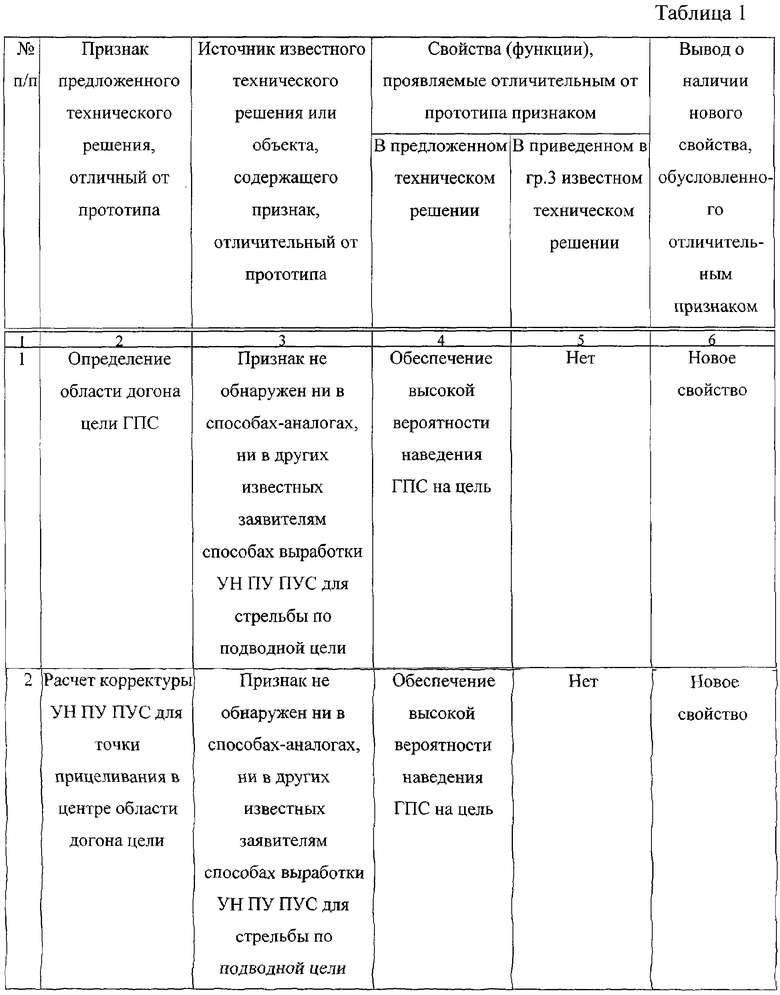
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известных способах не обнаружен.
Достижение положительного эффекта при осуществлении предложенного способа подтверждается сведениями, приведенными в таблице 2.
Вероятность поражения атомной многоцелевой подводной лодки при стрельбе в упрежденное место цели ракетами 90Р
Техническое осуществление предложенного способа поясняется чертежами, на которых:
Фиг.1 - неконтактная система обнаружения (НСО) цели ГПС,
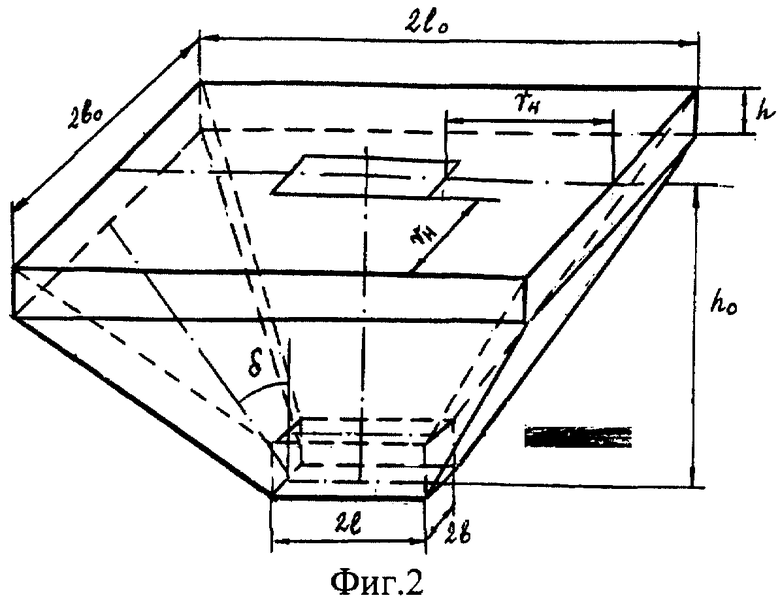
Фиг.2 - область захвата цели НСО ГПС,
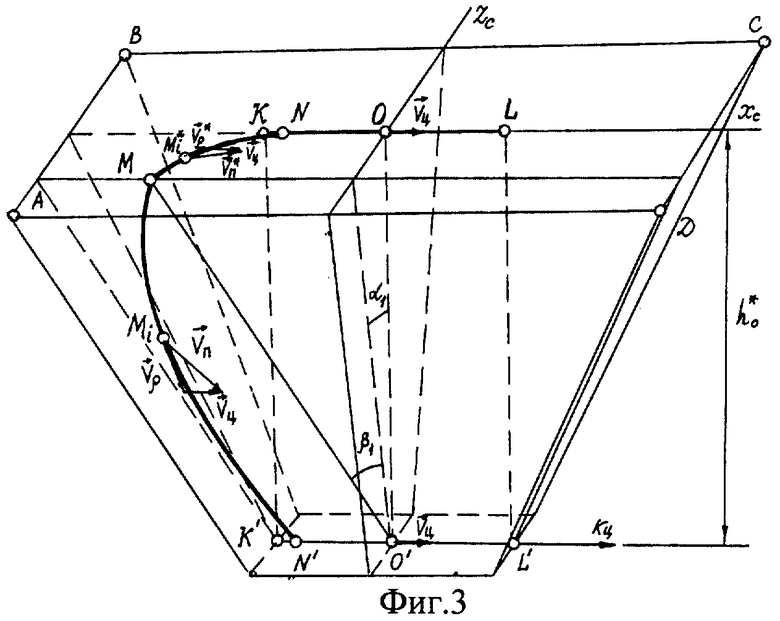
Фиг.3 - траектория снаряда при наведении на подводную цель,
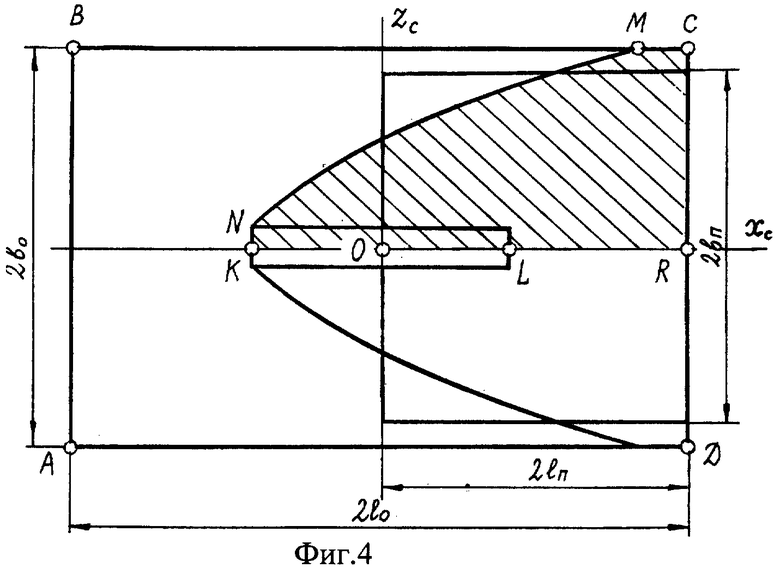
Фиг.4 - область догона цели ГПС,
Фиг.5 - координаты точки прицеливания ракеты 90Р.
Сущность предлагаемого способа заключается в следующем.
ГПС ракеты 90Р имеет следующие характеристики НСО цели (фиг.1):
rγ - отстояние картинной плоскости НСО снаряда от его передней оконечности;
rа - радиус реагирования НСО;
rн - радиус реагирования НСО в картинной плоскости, перпендикулярной оси равносигнальной зоны;
δ - угол характеристики направленности НСО.
Область захвата цели (ОЗЦ) НСО ГПС представляется в виде перевернутого обелиска (фиг.2), нижнее основание которого имеет размеры равновеликого цели прямоугольного параллелепипеда, а верхнее основание увеличено на величину rн:
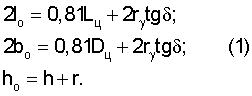
Здесь:
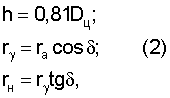
где Lц, Dц - длина и диаметр цели;
lо, bо, hо - характерные размеры ОЗЦ (полудлина, полуширина, высота);
2l, 2b, h - длина, ширина и высота прямоугольного параллелепипеда, равновеликого цели.
При попадании ГПС в ОЗЦ происходит обнаружение цели НСО снаряда и наведение ГПС на цель по траектории, указанной на фиг.3.
Здесь Vц, Vп, Vρ - скорость цели, скорость погружения ГПС и относительная скорость их движения;
 ,
,  ,
,  - проекции скорости цели, скорости погружения ГПС и относительной скорости их движения на верхнее основание ОЗЦ.
- проекции скорости цели, скорости погружения ГПС и относительной скорости их движения на верхнее основание ОЗЦ.
Проекция погонной траектории ГПС на верхнее основание ОЗЦ указана на фиг.4.
На верхнем основании ОЗЦ существует множество точек, составляющих площадь RCMN, называемую «областью догона цели», ограниченную некоторой кривой MN (фиг.4), при попадании в которую обеспечивается догон цели ГПС (Рн=1,0).
Площадь области SRCMN находится по формуле:

где Рн - вероятность догона цели ГПС при попадании снаряда в верхнее основание ОЗЦ, определяемая по отдельной методике или эмпирической формулой [3]:

Здесь Vц - скорость цели (м/с); Vпр - предельная скорость погружения ГПС.
Для определения вероятности попадания в область догона цели (ОДЦ) (Рн=1,0) она принимается в виде равновеликого прямоугольника со сторонами, равными:
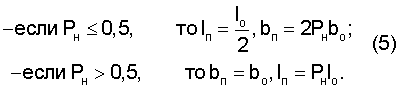
В формулах (5) приняты следующие обозначения:
lп, bп - характерные размеры ОДЦ (полудлина и полуширина).
Таким образом, ОДЦ преобразуется в прямоугольник со сторонами 2lп*2bп (фиг.5).
Точкой прицеливания ракет должен служить центр О* данного прямоугольника, а координаты точки прицеливания относительно стреляющего корабля находятся по следующим формулам:

Δxc=lо-lп;
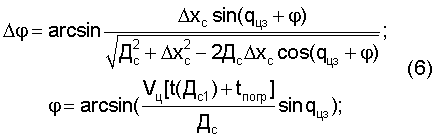


Здесь Дс и  - дистанции стрельбы в точки О и О* соответственно;
- дистанции стрельбы в точки О и О* соответственно;
О - центр верхнего основания ОЗЦ;
О* - центр ОДЦ S1;
Δхс - расстояние между центрами О и О* по оси ОХс, совпадающей с курсом цели;
qцз - курсовой угол цели в момент залпа;
ϕ - угол упреждения при стрельбе ракетами в точку О;
Δϕ - поправка к углу упреждения для стрельбы в точку О*;
Дз - дистанция залпа;
Дс1 - дистанция стрельбы в точку О в первом приближении;
t(Дз) и t(Дc1) - время полета ракеты на дистанцию, равную в первом приближении дистанции залпа Дз, и на дистанцию второго приближения Дс1;
tпогр - время погружения ракету на глубину нахождения верхнего основания ОЗЦ.
Предлагаемый способ обладает перед прототипом преимуществом, указанным в таблице 2.
Ожидаемый от использования предложенного способа экономический эффект может быть оценен для условий стрельбы, указанных в таблице 2. Так для обеспечения эффективности стрельбы, свойственной способу-прототипу, предлагаемый способ позволит сократить число ракет в залпе с 12 до 10 единиц. При стоимости одной ракеты 500 тыс.руб. экономический эффект оценивается в среднем в 1 млн руб. на 1 залп.
Источники информации
1. «Система ПУСБ «Буря». Описание. - М.: Воениздат, 1983.
2. Описание изобретения к патенту Российской Федерации RU 2176773 С2, 10.12.2001, 7 F 41 G 7/22, G 01 S 3/78.
3. Новиков А.В. Противолодочное ракетное оружие. Теоретические основы. - СПб.: ВМИ, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2018 |
|
RU2697694C1 |
| СПОСОБ ПОСТАНОВКИ АЭРОЗОЛЬНОГО ОБЛАКА | 2014 |
|
RU2560221C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2711409C2 |
| РЕАКТИВНЫЙ ПРОТИВОЛОДОЧНЫЙ СНАРЯД (ВАРИАНТЫ) | 2010 |
|
RU2439478C1 |
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| РАКЕТА-ПЛАНЁР С ГРАВИТАЦИОННЫМ ПОДВОДНЫМ СНАРЯДОМ | 2022 |
|
RU2785316C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| СПОСОБ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ ПУШКИ УПРАВЛЯЕМЫМ СНАРЯДОМ | 2007 |
|
RU2343392C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2019 |
|
RU2735358C1 |
Изобретение относится к способам выработки углов наведения пусковой установки приборами управления стрельбой. Сущность изобретения заключается в том, что определяют вероятность догона подводной цели и дополнительно вводят корректуру углов наведения пусковой установки в расчет упредительной точки, совпадающей с центром области догона цели, путем определения линейного отклонения точки прицеливания Δхс по формуле: Δхс=lо-ln, где ln - полудлина области догона цели, lо - полудлина области захвата цели.
Технический результат изобретения состоит в повышении вероятности поражения подводной цели при стрельбе ракетами 90Р в упрежденное место цели. 5 ил., 2 табл.
Способ выработки углов наведения пусковой установки для стрельбы по подводной цели ракетами 90Р, включающий определение координат и параметров движения цели, решение задачи встречи ракеты с целью в упрежденной точке, учитывающей воздушный участок траектории ракеты и участок погружения гравитационного подводного снаряда (ГПС) ракеты на заданную глубину погружения цели, выработку корректуры углов наведения пусковой установки для стрельбы в центр области догона цели ГПС, отличающийся тем, что определяют вероятность догона подводной цели и дополнительно вводят корректуру углов наведения пусковой установки в расчет упредительной точки, совпадающей с центром области догона цели, путем определения линейного отклонения точки прицеливания Δхс по формуле
Δхс=lо-ln,
где ln - полудлина области догона цели,
lо - полудлина области захвата цели.
| "Система ПУСБ "Буря" | |||
| Описание", Москва, Военное издательство, 1983 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| ПЕРЕНОСНОЙ КУХОННЫЙ ОЧАГ С КИПЯТИЛЬНИКОМ | 1920 |
|
SU587A1 |
| СПОСОБ НАВЕДЕНИЯ | 1999 |
|
RU2176773C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РАКЕТ С ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1997 |
|
RU2113679C1 |
| US 3970006 A, 20.07.1976 | |||
| US 5096139 A, 17.03.1992. | |||

