Описываемое изобретение относится к средствам поражения подводных лодок (ПЛ) противника.
На вооружении надводных кораблей и подводных лодок ВМФ России и ВМС зарубежных стран состоят противолодочные управляемые ракеты (ПЛР) двух типов: баллистические и крылатые [1, с.356-361].
Известны баллистические ПЛР первого поколения «Асрок» (США, 1961), «Саброк» (США, 1965), «Вихрь» (СССР, 1968) и «Вьюга (СССР, 1969) [2]. Их недостатком, кроме ПЛР «Асрок», было оснащение только ядерной боевой частью (ЯБЧ). В дальнейшем в качестве боевой части ПЛР стали использовать противолодочные малогабаритные торпеды (МГТ). Так были созданы крылатые ПЛР «Малафон» (Франция, 1965), «Икар» (Великобритания, 1965) и 85Р «Метель» (СССР, 1973).
Развитие ракетной техники, двигателестроения, а также информационных технологий способствовало эволюции противолодочного ракетного оружия, которая осуществлялась по пути увеличения дальности полета ракет и совершенствования их систем управления. Так в 1990-х гг. в индустриально развитых странах мира было создано новое поколение крылатых ПЛР и комплексов, которые имели повышенную дальность стрельбы более 100 км.
ПЛР «Супер Икар» (Великобритания, 1990) до 110 км и ПЛР «Милас» (Франция, Италия, 1993) до 100 км. Развитие информационных технологий позволило оснастить указанные ПЛР новыми системами управления, позволяющими осуществлять управление ракетой с надводного корабля, вертолета или наземного пункта управления [2]. Однако увеличенная дальность полета указанных ракет оставалась невостребованной по причине отсутствия надежных источников целеуказания, способных обнаруживать ПЛ противника в открытом море на больших дальностях.
Кроме того, снижение интереса к ПЛР иностранные специалисты объясняют такой причиной как то, что корабельные ГАС целеуказания имеют сложную конфигурацию зон наблюдения с многочисленными «теневыми» зонами, в зависимости от гидрологии и глубин в районе, вследствие чего возможен пропуск ПЛ-цели (перелет ПЛР) по траектории. Учитывая все эти факты, даже в такой богатой стране как США прекратились разработки ПЛР как нецелесообразные по военно-экономическим критериям [1, с.358].
Указанный недостаток может быть устранен путем:
1) выбора варианта крылатой противолодочной ракеты, имеющей настильную траекторию с небольшой маршевой высотой (до 10-20 м) [1, с.328-336];
2) оснащения ПЛР средством обнаружения погруженной подводной лодки и устройствами для предотвращения (компенсации) промаха ракеты (перелета).
Ближайшим аналогом предлагаемой ракеты является крылатая противолодочная ракета, устройство которой включает корпус с несущим крылом и органами управления (элеронами, вертикальным рулем и рулями высоты), образующие планер; двигательную установку (ДУ), включающую стартовый (СРД) и, как правило, маршевый (МРД) реактивные (ракетные) двигатели; бортовую систему управления (БСУ), обеспечивающую автономное (АУ) и дистанционное (теле) управление (ТУ) ракетой; бортовой источник питания; торпедную боевую часть (ТБЧ), в качестве которой используют малогабаритную торпеду (МГТ), предназначенную для поражения ПЛ противника и оснащенную системой торможения и стабилизации (СТС) для обеспечения требуемых параметров доставки в расчетную точку и приводнения МГТ [3]. МГТ оснащают неконтактной системой обнаружения (НСО) цели, в соответствии с командами которой осуществляют поиск цели, ее обнаружение, сближение с целью и поражение путем подрыва боевой части и последующего механического разрушения корпуса подводной лодки.
Известны магнитометрические средства обнаружения объекта-источника магнитного поля [1], [4], [5], [6], [7], [8], в частности авиационные поисковые магнитометры - устройства обнаружения погруженных подводных лодок с дальностью действия до 800 м [1, с.396], и способ определения координат источника магнитного поля [7].
Магнитометрические средства обнаружения (авиационные поисковые магнитометры) могут быть размещены на крылатой ПЛР в качестве средства обнаружения погруженной ПЛ. Низколетящая крылатая ПЛР, имеющая настильную траекторию с небольшой маршевой высотой порядка 5…10 м (для увеличения глубины поиска цели) [8, с.107], оснащенная магнитометром, позволяет исключить пропуск ПЛ-цели с глубиной погружения до 500-600 м (перелет ПЛР) по траектории и отделить ТБЧ в точке обнаружения ПЛ.
Глубины погружения современных ПЛ не превышают 600 м, что обеспечивает их надежное обнаружение магнитометром, размещенным на крылатой низколетящей ПЛР. Торпедные боевые части ПЛР после приводнения осуществляют циркуляционный поиск ПЛ-цели с помощью акустической аппаратуры самонаведения (АСН). При дальности действия АСН порядка нескольких километров обеспечивается надежное вторичное обнаружение и поражение ПЛ-цели ТБЧ.
Целью изобретения является разработка крылатой противолодочной ракеты, позволяющей, в условиях неустойчивого целеуказания или в условиях наблюдения за целью в пассивном режиме работы гидроакустической станции (ГАС) или гидроакустического комплекса (ГАК) корабля-носителя, когда дистанция до ПЛ-цели, находящейся на значительном удалении от носителя (до 100 км и более), известна ориентировочно, производить стрельбу в район предполагаемого местонахождения ПЛ противника, осуществлять «сканирование» подводной среды (поиск цели) в полете ракеты на небольшой маршевой высоте порядка 5…10 м (для увеличения глубины поиска цели) и, с обнаружением ПЛ, атаковать ее, исключая пропуск ПЛ-цели (перелет ПЛР) на траектории.
После обнаружения ПЛ противника магнитометром ракеты в БСУ вырабатывают команду на маневр ракеты для разворота с одновременным набором высоты, возвращения в точку обнаружения цели и сброса ТБЧ. Маневр набора высоты необходим для обеспечения сброса ТБЧ, ее торможения и безопасного входа в воду. Для повышения точности торпедометания место обнаруженной цели следует обозначать маркером, который сбрасывают в точке обнаружения цели магнитометром. Маркер представляет собой сбрасываемый на парашюте контейнер, в котором размещают поплавок, газогенератор для его надува, средство визуального, инфракрасного или радиотехнического обозначения места. Вместо маркера в вариантном исполнении целесообразно использовать радиогидроакустический буй (РГБ) [9, с.13, 14, 352], который сбрасывают в точке обнаружения цели, включают его в работу и осуществляют прослушивание подводной среды в пассивном режиме, обнаруживают подводную цель, выдают сигнал об обнаружении цели на ракету (вторую ракету залпа, носитель, КП). Ракета выполняет маневр сближения с маркером или РГБ, сбрасывает ТБЧ в расчетную точку нахождения ПЛ-цели, ТБЧ осуществляет поиск ПЛ-цели, обнаруживает цель, выполняет ее атаку и поражение. ПЛР могут применяться залпом, распределяясь по расчетным точкам прицеливания относительно обнаруженной ПЛ-цели известными способами (стрельба по площади) [12, с.432].
Поставленная цель достигается благодаря тому, что, в отличие от известных крылатых противолодочных ракет, ракету оснащают магнитометром, связанным с БСУ, маркером (устройством обозначения места цели) или радиогидроакустическим буем (РГБ), маркер оборудуют в виде контейнера с парашютом, в котором размещают поплавок, газогенератор для его надува и средство визуального, инфракрасного или радиотехнического обозначения места, на ракету устанавливают устройство поиска маркера (РГБ), связанное с БСУ, в БСУ вводят программу управления ракетой, в которой предусматривают команды управления после срабатывания магнитометра при обнаружении цели, после обнаружения маркера (РГБ), команду регистрации в запоминающем устройстве БСУ координат точки обнаружения цели, команду на сброс маркера (РГБ), команду на набор высоты с одновременным разворотом ракеты в точку обнаружения цели, команду на поиск маркера (РГБ), команду для выполнения расчета в БСУ точки сброса ТБЧ после обнаружения маркера (РГБ), команду на сброс ТБЧ «по маркеру» (сработавшему РГБ), команду на ввод в систему управления ТБЧ информации о местонахождении цели, команду на увод ракеты для ее самоликвидации на дистанцию, исключающую создание помех неконтактной системе обнаружения (НСО) цели ТБЧ, команду на самоликвидацию ракеты, в состав БСУ ракеты включают устройства взаимного обмена информацией (ВЗОИ) между ракетами в залпе, носителем и КП для их координации действий в случаях срабатывания магнитометра при обнаружении цели или обнаружении маркера (сработавшего РГБ) своего или другой ракеты залпа.
В вариантном исполнении для обнаружения малошумной подводной лодки (ПЛ) ракету оснащают устройством со взрывным источником звука (ВИЗ) [9, с.75], предназначенным для сброса его с ракеты после сбрасывания РГБ и совместного с РГБ использования при освещении подводной обстановки, счетно-решающим прибором (СРП) или поисково-прицельной системой (ППС), связанными с БСУ ракеты и предназначенными для обработки информации от РГБ и передачи ее по устройству ВЗОИ на другие ракеты залпа, носитель или КП.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
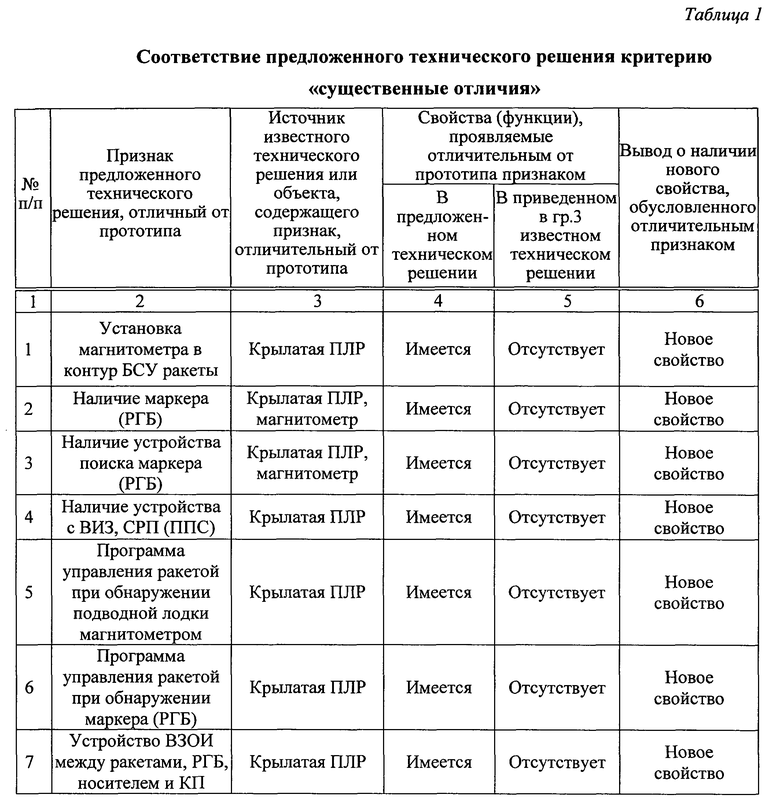
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известном устройстве не обнаружен.
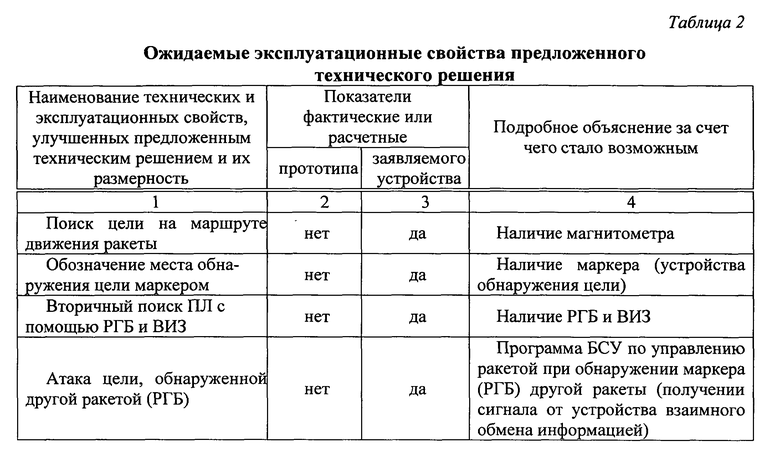
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в таблице 2.
2. Способ применения противолодочной крылатой ракеты
Известен способ поражения ПЛ универсальной крылатой ракетой 85РУ, оснащенной ТБЧ, включающий запуск ракеты, управление ракетой на стартовом и маршевом участках траектории, сброс ТБЧ в расчетной точке, парашютирование торпеды, ее приводнение, поиск и захват ПЛ системой самонаведения торпеды, атаку цели, попадание торпеды в ПЛ и подрыв боевой части [10], [11].
Указанный способ, как отмечалось выше, не является эффективным при стрельбе ПЛР на большие дистанции и неполном (известен только пеленг на цель) целеуказании, так как способ не обеспечивает сброс ТБЧ в зоне захвата цели НСО торпеды.
Целью изобретения является разработка способа применения крылатой противолодочной ракеты, оснащенной магнитометром и соответствующими дополнительными устройствами, обеспечивающими обнаружение цели и управление ракетой на траектории.
Способ применения крылатой ПЛР, заключающийся в том, что подводную лодку обнаруживают позиционными или выносными средствами обнаружения, в условиях неустойчивого целеуказания или в условиях наблюдения за целью в пассивном режиме работы гидроакустической станции или гидроакустического комплекса корабля-носителя, когда дистанция до ПЛ-цели, находящейся на значительном удалении от носителя (до 100 км и более) известна ориентировочно, выдают на носитель противолодочной ракеты (ПЛР) данные целеуказания (в том числе только пеленг на цель), выполняют предстартовую подготовку и проверку ПЛР и ТБЧ, вводят в БСУ ракеты полетное задание, запускают ракету из пусковой установки, управляют ракетой на стартовом и маршевом участках траектории с использованием БСУ ракеты и в вариантном исполнении по командам от системы ТУ с носителя (КП), удерживают маршевую малую высоту полета ракеты 5…10 м над уровнем моря (для увеличения глубины поиска цели), по команде БСУ включают в расчетной точке магнитометр и осуществляют поиск цели на заданном маршруте полета, с обнаружением цели в БСУ вырабатывают команду на сброс маркера или РГБ, передают сигнал об обнаружении цели по системе ВЗОИ на другую ракету залпа (носитель, КП), рассчитывают маневр для сброса ТБЧ в зоне захвата цели НСО торпеды, в случае непопадания точки сброса ТБЧ в эту зону или в соответствии с заданием рассчитывают маневр для разворота ракеты и сброса ТБЧ в точке с маркером (сработавшим РГБ), осуществляют разворот ракеты и поиск маркера (сработавшего РГБ) устройством их поиска, обнаруживают маркер (РГБ), после сброса РГБ включают его в работу и осуществляют прослушивание подводной среды в пассивном режиме, обнаруживают подводную цель и выдают сигнал об обнаружении цели (срабатывании РГБ) на ракету (носитель, КП) или все ракеты залпа при залповой стрельбе, выполняют маневр ракеты для сброса ТБЧ, сбрасывают ТБЧ в точку нахождения маркера или сработавшего РГБ (в случае поступления сигнала от него об обнаружении цели), после сброса ТБЧ в БСУ ракеты вырабатывают команды по ее управлению для самоликвидации на безопасном расстоянии от точки сброса ТБЧ, обеспечивающим отсутствие помех работе НСО торпеды, при получении сигнала от другой ракеты залпа об обнаружении цели ее магнитометром, в БСУ первой ракеты вырабатывают команды управления для осуществления поиска маркера (РГБ) другой ракеты, обнаруживают маркер (РГБ), выполняют маневр для сброса ТБЧ в точку нахождения маркера или сработавшего РГБ (при условии получения от него сигнала об обнаружении цели), сбрасывают ТБЧ, осуществляют поиск ПЛ-цели торпедой, обнаруживают цель, выполняют ее атаку путем сближения торпеды на дистанцию срабатывания ее неконтактного взрывателя или до момента столкновения торпеды с корпусом цели, подрывают взрывчатое вещество боевой части торпеды и поражают цель.
В вариантном исполнении для обнаружения малошумной ПЛ после сброса с борта ракеты РГБ выполняют сброс устройства со взрывным источником звука (ВИЗ), осуществляют подрыв ВИЗ, принимают на гидрофонах РГБ отраженные от подводных объектов звуковые волны, созданные ВИЗ, передают информацию на СРП (ППС) ракеты, где ее обрабатывают, после чего по команде БСУ ракеты через устройство ВЗОИ передают обработанную информацию на другие ракеты залпа, носитель (КП), выполняют маневр ракеты по сбросу ТБЧ и атаке ПЛ или продолжают маршрут полета ракет.
Источники информации
1. Кузин В.П., Никольский В.И. Военно-морской флот СССР 1945-1991. - СПб: Историческое морское общество, 1996. - 614 с., ил.
2. Новиков А.В. и др. Реактивные системы морского подводного оружия. // Морская радиоэлектроника, №1, 2, 2009 г., с.60-62.
3. Новиков А.В. Противолодочное ракетное оружие. Теоретические основы. - СПб.: ВМИ, 2007. - 438 с.
4. Смирнов Б.М. Решение задачи определения координат источника магнитного поля / Журнал «Измерительная техника»: ежемесячный научно-технический журнал. - М.: Издательство стандартов, ISSN 0368-1025. - 2003, №7, с.38-42.
5. Ацюковский В.А. Эфиродинамические основы электромагнетизма. - М.: изд. «Петит», 2006. - 160 с.
6. Семевский Р.Б., Аверкиев В.В., Яроцкий В.А. Специальная магнитометрия. - СПб: Наука, 2002. - 228 с.
7. Способ определения координат источника магнитного поля (варианты) // Патент на изобретение №2452652, 10.06.2012 г.// Заявка на изобретение №2010103181 от 10.02.2010 г./ОАО «Маяк».
8. Вооружение и военно-морская техника России. - М.: ООО ИД «Военный парад», 2009. - 186 с.
9. Военно-морской словарь /Гл. ред. В.Н. Чернавин. - М.: Воениздат, 1989. - 511 с.
10. Способ поражения надводного корабля универсальной крылатой ракетой с торпедной боевой частью. RU 2382326 С2, 20.02.2008.
11. Широкорад А. Б. Оружие отечественного флота 1945-2000 /Под общ. ред. А.Е. Тараса. Минск: Харвест; М.: ООО «Издательство ACT», 2001.
12. Военно-морской словарь. М.: Воениздат, 1990. - 511 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ПРОТИВОЛОДОЧНОЙ КРЫЛАТОЙ РАКЕТОЙ | 2015 |
|
RU2594314C1 |
| УНИВЕРСАЛЬНАЯ ПО ЦЕЛЯМ КРЫЛАТАЯ РАКЕТА И СПОСОБЫ ПОРАЖЕНИЯ ЦЕЛЕЙ | 2015 |
|
RU2622051C2 |
| ЛЕТАЮЩИЙ РОБОТ-НОСИТЕЛЬ РАКЕТ КОРАБЕЛЬНОГО И ВОЗДУШНОГО БАЗИРОВАНИЯ | 2018 |
|
RU2711430C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2513366C2 |
| ПРОТИВОЛОДОЧНЫЙ РАКЕТНЫЙ КОМПЛЕКС С АВТОНОМНЫМ РЕАКТИВНЫМ САМОЛЕТОМ-НОСИТЕЛЕМ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2699616C2 |
| ПРОТИВОКОРАБЕЛЬНЫЙ РАКЕТНЫЙ КОМПЛЕКС С ЛЕТАЮЩИМ РОБОТОМ-НОСИТЕЛЕМ РАКЕТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2706295C2 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2699514C1 |
| КОМПЛЕКС АВИАЦИОННЫЙ РАЗВЕДЫВАТЕЛЬНО - ПОРАЖАЮЩИЙ | 2019 |
|
RU2725563C1 |
| ПАЛУБНЫЙ АВИАЦИОННЫЙ БЕСПИЛОТНЫЙ ПРОТИВОЛОДОЧНЫЙ КОМПЛЕКС (ПАБПК) | 2017 |
|
RU2684160C1 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
Изобретение относится к военной технике и может быть использовано в крылатых противолодочных ракетах. Противолодочная крылатая ракета (ПЛР) содержит корпус с крылом и органами управления, двигательную установку, бортовую систему управления (БСУ), устройство взаимного обмена информацией (ВЗОИ), бортовой источник питания, торпедную боевую часть в виде малогабаритной торпеды (МГТ) с системой торможения и стабилизации, магнитометр, радиоакустический буй или маркер (устройство обозначения места цели) в виде контейнера с парашютом, поплавком, газогенератором, средствами визуального, инфракрасного и радиотехнического обозначения места, устройство поиска маркера, связанное с БСУ, взрывной источник звука (ВИЗ). БСУ содержит программу управления ракетой с командами управления после срабатывания магнитометра при обнаружении цели, регистрации координат точки обнаружения цели, на сброс маркера, выполнения расчета точки сброса малогабаритной торпеды (МГТ), на ввод информации о местонахождении цели, на увод ракеты для самоликвидации, самоликвидации ракеты. Обнаруживают подводную лодку (ПЛ), выдают на носитель ПЛР данные целеуказания, выполняют предстартовую подготовку ПЛР и МГТ, вводят в БСУ полетное задание, запускают ракету, управляют ракетой на стартовом и маршевом участках траектории, удерживают малую маршевую высоту полета ракеты, в расчетной точке включают магнитометр, осуществляют поиск цели, подают команду на сброс маркера, передают сигнал об обнаружении цели по системе ВЗОИ, рассчитывают маневр для сброса и разворота МГТ, обнаруживают маркер, прослушивают ПЛ, сбрасывают МГТ и ВИЗ, подают команду на самоликвидацию ракеты на безопасном расстоянии. Изобретение позволяет поражать ПЛ в условиях неустойчивого целеуказания. 2 н. и 2 з.п. ф-лы.
1. Противолодочная крылатая ракета, представляющая собой корпус с несущим крылом и органами управления, образующие планер, двигательную установку, бортовую систему управления (БСУ), обеспечивающую автономное (АУ) и дистанционное (телемеханическое) управление (ТУ) ракетой с носителя или командного пункта (КП), бортовой источник питания, торпедную боевую часть (ТБЧ), в качестве которой используют малогабаритную торпеду (МГТ), предназначенную для поражения ПЛ противника и оснащенную системой торможения и стабилизации (СТС) для обеспечения требуемых параметров приводнения МГТ, отличающаяся тем, что ракету оснащают магнитометром, связанным с БСУ, маркером (устройством обозначения места цели) или радиогидроакустическим буем (РГБ), маркер оборудуют в виде контейнера с парашютом, в котором размещают поплавок, газогенератор для его надува и средство визуального, инфракрасного или радиотехнического обозначения места, на ракету устанавливают устройство поиска маркера (РГБ), связанное с БСУ, в БСУ вводят программу управления ракетой, в которой предусматривают команды управления после срабатывания магнитометра при обнаружении цели, после обнаружения маркера (РГБ), команду регистрации в запоминающем устройстве БСУ координат точки обнаружения цели, команду на сброс маркера (РГБ), команду на набор высоты с одновременным разворотом ракеты в точку обнаружения цели, команду на поиск маркера (РГБ), команду для выполнения расчета в БСУ точки сброса ТБЧ после обнаружения маркера (РГБ), команду на сброс ТБЧ «по маркеру» (сработавшему РГБ), команду на ввод в систему управления ТБЧ информации о местонахождении цели, команду на увод ракеты для ее самоликвидации на дистанцию, исключающую создание помех неконтактной системе обнаружения (НСО) цели ТБЧ, команду на самоликвидацию ракеты, в состав БСУ ракеты включают устройства взаимного обмена информацией (ВЗОИ) между ракетами в залпе, носителем и КП для их координации действий в случаях срабатывания магнитометра при обнаружении цели или обнаружении маркера (сработавшего РГБ) своего или другой ракеты залпа.
2. Противолодочная крылатая ракета по п.1, отличающаяся тем, что для обнаружения малошумной подводной лодки (ПЛ) ракету оснащают устройством со взрывным источником звука (ВИЗ), предназначенным для сброса его с ракеты после сбрасывания РГБ и совместного с РГБ использования при освещении подводной обстановки, счетно-решающим прибором (СРП) или поисково-прицельной системой (ППС), связанными с БСУ ракеты и предназначенными для обработки информации от РГБ и передачи ее по устройству ВЗОИ на другие ракеты залпа, носитель или КП.
3. Способ применения противолодочной крылатой ракеты, заключающийся в том, что подводную лодку обнаруживают позиционными или выносными средствами обнаружения, в условиях неустойчивого целеуказания или в условиях наблюдения за целью в пассивном режиме работы гидроакустической станции или гидроакустического комплекса корабля-носителя, когда дистанция до ПЛ-цели, находящейся на значительном удалении от носителя, известна ориентировочно, выдают на носитель противолодочной ракеты (ПЛР) данные целеуказания (в том числе только пеленг на цель), выполняют предстартовую подготовку и проверку ПЛР и ТБЧ, вводят в БСУ ракеты полетное задание, запускают ракету из пусковой установки, управляют ракетой на стартовом и маршевом участках траектории с использованием БСУ ракеты и в вариантном исполнении по командам от системы ТУ с носителя (КП), удерживают маршевую малую высоту полета ракеты (для увеличения глубины поиска цели), по команде БСУ включают в расчетной точке магнитометр и осуществляют поиск цели на заданном маршруте полета, с обнаружением цели в БСУ вырабатывают команду на сброс маркера или РГБ, передают сигнал об обнаружении цели по системе ВЗОИ на другую ракету залпа (носитель, КП), рассчитывают маневр для сброса ТБЧ в зоне захвата цели НСО торпеды, в случае непопадания точки сброса ТБЧ в эту зону или в соответствии с заданием рассчитывают маневр для разворота ракеты и сброса ТБЧ в точке с маркером (сработавшим РГБ), осуществляют разворот ракеты и поиск маркера (сработавшего РГБ) устройством их поиска, обнаруживают маркер (РГБ), после сброса РГБ включают его в работу и осуществляют прослушивание подводной среды в пассивном режиме, обнаруживают подводную цель и выдают сигнал об обнаружении цели (срабатывании РГБ) на ракету (носитель, КП) или все ракеты залпа при залповой стрельбе, выполняют маневр ракеты для сброса ТБЧ, сбрасывают ТБЧ в точку нахождения маркера или сработавшего РГБ (в случае поступления сигнала от него об обнаружении цели), после сброса ТБЧ в БСУ ракеты вырабатывают команды по ее управлению для самоликвидации на безопасном расстоянии от точки сброса ТБЧ, обеспечивающим отсутствие помех работе НСО торпеды, при получении сигнала от другой ракеты залпа об обнаружении цели ее магнитометром, в БСУ первой ракеты вырабатывают команды управления для осуществления поиска маркера (РГБ) другой ракеты, обнаруживают маркер (РГБ), выполняют маневр для сброса ТБЧ в точку нахождения маркера или сработавшего РГБ (при условии получения от него сигнала об обнаружении цели), сбрасывают ТБЧ, осуществляют поиск ПЛ-цели торпедой, обнаруживают цель, выполняют ее атаку путем сближения торпеды на дистанцию срабатывания ее неконтактного взрывателя или до момента столкновения торпеды с корпусом цели, подрывают взрывчатое вещество боевой части торпеды и поражают цель.
4. Способ применения противолодочной крылатой ракеты по п.3, отличающийся тем, что для обнаружения малошумной ПЛ после сброса с борта ракеты РГБ выполняют сброс устройства со взрывным источником звука (ВИЗ), осуществляют подрыв ВИЗ, принимают на гидрофонах РГБ отраженные от подводных объектов звуковые волны, созданные ВИЗ, передают информацию на СРП (ППС) ракеты, где ее обрабатывают, после чего по команде БСУ ракеты через устройство ВЗОИ передают обработанную информацию на другие ракеты залпа, носитель (КП), выполняют маневр ракеты по сбросу ТБЧ и атаке ПЛ или продолжают маршрут полета ракет.
| РЕАКТИВНЫЙ ПРОТИВОЛОДОЧНЫЙ СНАРЯД (ВАРИАНТЫ) | 2010 |
|
RU2439478C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ И КОМПЛЕКС ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ | 2007 |
|
RU2371668C2 |
| WO 2008054336 A2, 08.05.2008 | |||
| US 7347146 B1, 25.03.2008 | |||

