Изобретение относится к способам наведения носителя на цель оптической головкой самонаведения (ОГС) в режиме ее автосопровождения и может быть использовано на конечном участке траектории движения носителя.
Очевидно, что в режиме автосопровождения цель необходимо идентифицировать с точкой, в которую в конечном счете направляется носитель, т.е. с точкой прицеливания. Система управления носителем по сигналам с ОГС сводит в процессе полета к нулю угловую скорость линии визирования, соединяющей центр масс носителя и точку, идентифицируемую с целью. До тех пор, пока носитель находится далеко от цели, то есть когда угловой размер изображения цели в поле зрения ОГС не превышает величину элемента приемной системы, сигнал от цели индицируется как сигнал от точечного излучателя. По мере сближения с целью угловые размеры ее изображения возрастают. При этом в ОГС с высокой разрешающей способностью индицируются сигналы от нескольких точек, принадлежащих цели.
В известной ОГС [1] описан способ, который заключается в том, что обзор поля зрения ОГС производится путем розеточного сканирования. В процессе обзора определяются, регистрируются и накапливаются координаты всех индицируемых точек. В данном случае цель идентифицируется, например, с геометрическим центром этих точек. По окончании цикла полного обзора вычисляется среднее арифметическое этих координат, то есть координаты геометрического центра всех индицируемых точек, которые и используются в качестве координат точки слежения. В соответствии с этими координатами формируются сигналы автосопровождения цели ОГС и управления носителем. На конечном участке наведения, когда угловой размер цели равен или превышает угловой размер поля обзора ОГС (определение, данное в [2]), при идентификации цели с геометрическим центром воспринимаемого ОГС участка цели ухудшается процесс автосопровождения, так как возникает неопределенность в определении положения данного участка цели, не отличающегося от соседнего, относительно центра поля зрения ОГС при его перемещении. Это является существенным недостатком известного способа, ограничивающим его использование на конечном участке наведения.
Наиболее близким по своей технической сущности к предлагаемому способу является выбранный в качестве прототипа способ [2]. В известном способе наведения ракет [2] , предназначенном для наведения носителя на цель на конечном участке траектории, когда сигнал от цели существенно превышает сигналы от неоднородностей фона, в ОГС последовательно, через известные интервалы времени создаются кадры изображения цели (ИЦ) в ИК-диапазоне. Изображение преобразуется в совокупность сигналов, представляющих собой прямоугольную матрицу. После формирования матрицы координат индицируемых в поле зрения ОГС точек в способе [2] предлагается принимать в качестве точки слежения первую по направлению считывания (например, самую левую) индицируемую точку PT, которая будет принадлежать контуру ИЦ. Кроме того, предлагается перед конечным участком определить точку прицеливания PA, отстоящую от точки PT на определенном расстоянии. Таким образом, цель идентифицируется с точкой PA, куда направляется носитель. При сближении угол между точками PA и PT возрастает, поэтому в способе [2] определяется коэффициент роста, в соответствии с которым корректируется дополнительный сигнал управления носителем, даже, если PA выходит за поле зрения ОГС.
Недостатком известного способа, выбранного в качестве прототипа, является ограниченность области его использования, что обусловлено следующим. Принятая в качестве точки слежения первая по направлению считывания точка может оказаться не принадлежащей контуру цели точкой, а сброшенной с цели световой ловушкой. Кроме того, при сближении при управлении носителем таким образом, чтобы он направлялся в точку PA, возрастает угловая скорость линии визирования точки PT, что может привести к срыву автосопровождения цели на относительно большой с позиции точности наведения дальности до нее. Условия срыва автосопровождения, а именно: величина максимальной угловой скорости автосопровождения и допустимое время срыва обычно присутствуют в требованиях к ОГС.
Задачей изобретения является повышение надежности выбора точки, идентифицируемой с целью на конечном участке наведения в условиях организованного оптического противодействия ОГС со стороны цели, а также обеспечение возможности достижения требуемой точности процесса наведения носителя на цель.
Для достижения этого технического результата предлагается в способе наведения, включающем определение координат индицируемых в поле зрения ОГС точек цели и формирование матрицы координат, идентификацию цели с одной из точек контура изображения цели, формирование в соответствии с координатами этой точки сигналов автосопровождения цели и управления носителем, при сближении с целью измерять максимальный угловой размер αmax изображения цели и при 2β > αmax > β, где 2β - величина поля зрения ОГС, определить координаты геометрического центра и особых в математическом смысле точек контура изображения цели (точки излома, экстремумы, точки перегиба), а затем идентифицировать цель с ближайшей к геометрическому центру особой точкой контура.
В том случае, когда могущества носителя недостаточно для поражения цели при его встрече с ближайшей к геометрическому центру особой точкой контура изображения цели, в способе предусматривается возможность идентификации цели с другой новой точкой, находящейся внутри контура цели. Эта точка располагается на направлении от ближайшей к геометрическому центру особой точки контура к геометрическому центру изображения цели (ГЦИЦ) и отстоит от особой точки контура на угловую величину ΔΩc, вычисляемую по формуле
где  - максимальная располагаемая ОГС угловая скорость автосопровождения цели,
- максимальная располагаемая ОГС угловая скорость автосопровождения цели,
TОСТ С - допустимое время, оставшееся до встречи с целью, в момент срыва автосопровождения.
При этом формируют дополнительный сигнал управления носителем, действующий в указанном направлении и пропорциональный величине угловой скорости
ΔΩ′= ΔΩc/(T
где TОСТ Н - интервал времени, оставшийся до встречи с целью, определяемый по избиению максимального углового размера αmax на интервале 2β > αmax> β,
t - текущее время, отсчитываемое от момента TОСТ НАЧ до момента срыва автосопровождения цели.
Сущность предлагаемого изобретения заключается в следующем.
В известных способах наведения отсутствуют признаки, присущие заявляемому способу. В то время, как в прототипе в качестве точки слежения выбирается первая по направлению считывания точка, принадлежащая контуру изображения цели (ИЦ), в предлагаемом способе определяются координаты особых в математическом смысле точек контура ИЦ. Такими точками могут быть точки излома, точки максимумов и минимумов кривой контура ИЦ. В качестве примера рассмотрим точку излома контура, являющуюся вершиной угла определенной величины. При сближении носителя с целью происходит изменение масштаба изображения, однако величина угла при вершине точки излома, являющаяся отличительным признаком, присущим только данной точке контура, остается неизменной в соответствии с теорией подобия плоских фигур, формируемых одна за другой путем изменения масштаба изображения. Таким образом, выбор в качестве идентифицируемой с целью одной из особых точек обеспечивает при покадровой обработке изображения возможность обнаружения и определения координат идентифицируемой точки при помощи установленного отличительного признака, не меняющегося в процессе сближения носителя с целью. Предложенная в качестве идентифицируемой особая точка контура ИЦ гарантирует надежность определения ее координат, т. к. точку практически невозможно замаскировать, присвоив ее признаки другой точке на цели или объекту вне цели (светоловушке), а следовательно, обеспечивает точность процесса наведения носителя на цель. Расположение упомянутой особой точки как можно ближе к ГЦИЦ необходимо для того, чтобы поразить цель в ее наиболее уязвимой области, и таким образом, также способствует надежности и точности процесса наведения.
Особые в математическом смысле точки контура изображения цели определяются, когда максимальный угловой размер αmax изображения цели не превышает величину 2β поля зрения ОГС и при этом разрешающая способность ОГС позволяет обнаружить хотя бы одну из этих точек.
Для того чтобы обеспечить поражение цели при недостаточном могуществе носителя, в предложенном способе предусматривается возможность идентификации с целью другой точки, находящейся внутри контура цели. Так как эта точка находится ближе к ГЦИЦ, являющемуся наиболее уязвимой точкой цели, то попадание в нее гарантирует поражение цели при меньшем могуществе носителя.
Сущность изобретения поясняется чертежами.
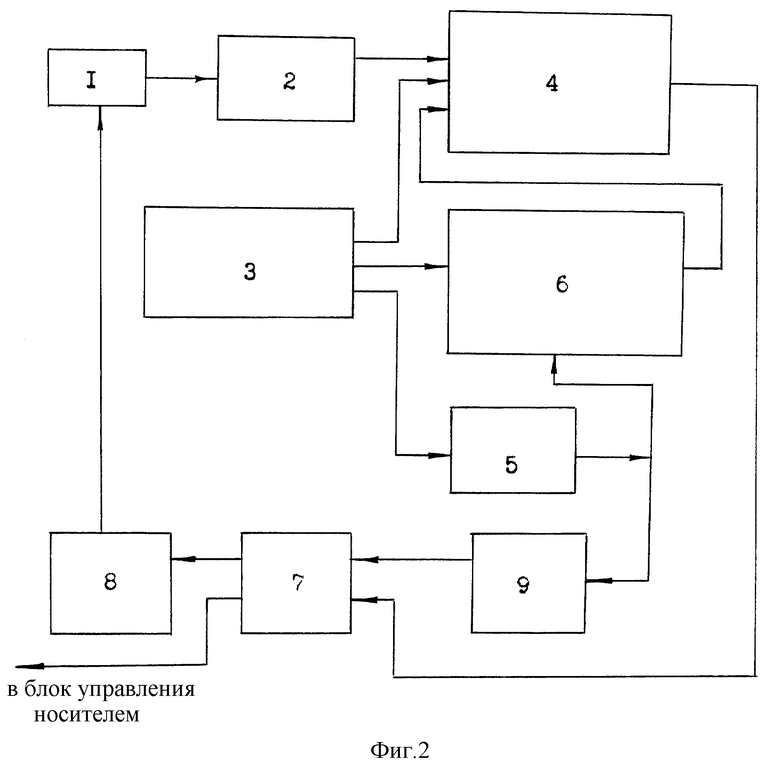
Фиг. 1 и ее описание поясняют взаимосвязь угловых скоростей  и
и  точек PT и PA с учетом времени, оставшегося до встречи носителя с целью (TОСТ).
точек PT и PA с учетом времени, оставшегося до встречи носителя с целью (TОСТ).
На фиг. 1 обозначены:
VЦ и VН - модули векторов скоростей цели и носителя,
RT и RA - дальности от носителя до точек PT и PA,
θЦ и θН - углы векторов скоростей VЦ и VН,
ΩТ и ΩН - углы визирования точек PT и PA,
PН - центр тяжести носителя.
Пусть ΩТ= ΩА+ΔΩ (1).
Уравнение кинематики точек PT и PН с учетом (1) имеют вид:
Преобразуем (2) и (3)
Уравнения кинематики точек PA и PH имеют вид
Принимая cos(ΔΩ) = 1 и sin(ΔΩ) = ΔΩ, и подставляя (6) и (7) в (4) и (5), получим

Принимая, что RT=RA=R и R'T=R'A=R', преобразуем (8)
или
где TОСТ - время, оставшееся до встречи с целью.
На фиг. 2 представлена функциональная схема устройства для реализации предлагаемого способа.
На фиг. 2 введены следующие обозначения:
1 - фотооптическая система (ФОС),
2 - блок индикации сигналов от цели,
3 - блок формирования матрицы координат индицируемых точек,
4 - блок выбора координат точки, идентифицируемой с целью,
5 - блок определения углового размера цели,
6 - блок определения координат особых точек контура цели и их признаков,
7 - блок формирования сигналов управления,
8 - устройство перемещения визирной оси,
9 - блок определения времени, оставшегося до встречи с целью.
Наведение на цель ОГС, функциональная схема которой представлена на фиг. 2, осуществляется следующим образом. С учетом требований к точности наведения носителя на заданную цель на конечном участке траектории ФОС 1 должна иметь относительно большое поле зрения и обладать высокой разрешающей способностью. Кроме того, принятый способ обзора поля зрения должен быть обеспечен в дальнейшем по сигналам с блока 2 возможностью формирования в блоке 3 матрицы координат индицируемых точек и, в свою очередь, обеспечивать высокую скорость обновления информации.
В процессе сближения с целью в блоке 5 по сигналам из блока 3, в котором к этому времени уже сформирована матрица координат индицируемых точек, измеряется максимальный угловой размер αmax изображения цели. В процессе измерения по изменению углового размера определяется и фиксируется время TОСТ Н, оставшееся до встречи с целью. Далее с момента измерения время TОСТ Н, оставшееся до встречи с целью, определяется в соответствии с текущим временем полета.
Когда измеренный максимальный угловой размер изображения цели будет находиться в диапазоне от β до 2β (2β - величина поля зрения ОГС), происходит переход на конечный участок наведения. В это время в блоке 4 определяются координаты геометрического центра изображения цели (ГЦИЦ), а в блоке 6 формируется информация об особых точках контура цели. В блоке 4 на основе информации об особых точках контура, сформированной в блоке 6, и с учетом информации, поступающей из блока 3, выбирается точка, идентифицируемая с целью, которая должна быть ближайшей к ГЦИЦ особой точкой контура. Указанная особая точка контура идентифицируется с целью в течение всего оставшегося времени наведения носителя. Выбор координат точки, идентифицируемой с целью, производится в блоке 4 с учетом результатов отстройки от естественных и организованных помех. На конечном участке наведения для поиска выбранной особой точки в блоке 4 используется только информация из блока 6. Сигналы из блока 4 поступают в блок 7 и далее в устройство 8 перемещения визирной оси и в блок управления носителем (на фиг. не показан).
Если могущества носителя недостаточно для обеспечения поражения цели при встрече с точкой PT (ближайшей к ГЦИЦ особой точкой контура), возможно его направление в точку PA, расположенную на направлении от PT к ГЦИЦ и отстоящую от PT на угловую величину ΔΩC (см. фиг. 1), вычисляемую по формуле
где  - максимальная располагаемая ОГС угловая скорость автосопровождения,
- максимальная располагаемая ОГС угловая скорость автосопровождения,
TОСТ С - допустимое время, оставшееся до встречи с целью в момент срыва автосопровождения.
Эти величины ( и TОСТ С) обычно указываются в требованиях к ОГС. В блоке 7 с сигналами из блока 4 суммируются сигналы, сформированные в блоке 7 на основе поступающей из блока 9 информации о времени TОСТ, оставшемся до встречи с целью. Величина TОСТ вычисляется в блоке 9 до начала конечного участка по поступающей из блока 5 информации об изменении максимального углового размера цели, а затем с момента перехода на конечный участок полученный результат экстраполируется.
и TОСТ С) обычно указываются в требованиях к ОГС. В блоке 7 с сигналами из блока 4 суммируются сигналы, сформированные в блоке 7 на основе поступающей из блока 9 информации о времени TОСТ, оставшемся до встречи с целью. Величина TОСТ вычисляется в блоке 9 до начала конечного участка по поступающей из блока 5 информации об изменении максимального углового размера цели, а затем с момента перехода на конечный участок полученный результат экстраполируется.
Таким образом, предложенный способ, по сравнению с прототипом позволяет в условиях организованного оптического противодействия со стороны цели повысить надежность выбора точки идентификации цели ОГС. Это стало возможным благодаря идентификации цели с точкой контура, характеризующейся особым признаком, не изменяющимся в процессе сближения носителя с целью на конечном участке траектории, что в свою очередь обеспечило требуемую точность процесса наведения на цель.
Использованные источники
1. Заявка Японии 61-10783, кл. G 01 S 3/78, H 04 N 7/18, опубл. 31.03.86.
2. Патент США 4898341, кл. F 41 G 7/22, опубл. 06.02.90 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ НА ВОЗДУШНУЮ ЦЕЛЬ | 2018 |
|
RU2686388C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ОРУЖИЕМ ОГНЕВОЙ ЗАЩИТЫ НОСИТЕЛЯ С РАДИОЛОКАЦИОННЫМ ПРИЦЕЛОМ | 2003 |
|
RU2230277C1 |
| СПОСОБ ВЫРАБОТКИ УГЛОВ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ДЛЯ СТРЕЛЬБЫ ПО ПОДВОДНОЙ ЦЕЛИ РАКЕТАМИ 90Р | 2003 |
|
RU2276317C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| КООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2016 |
|
RU2644991C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ ИНЕРЦИАЛЬНОГО АВТОСОПРОВОЖДЕНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2498193C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
Изобретение предназначено для идентификации цели на конечном участке траектории движения носителя. Оно позволяет повысить надежность выбора точки, идентифицируемой с целью на конечном участке наведения в условиях организованного оптического противодействия оптической головке самонаведения (ОГС) со стороны цели. Сущность изобретения заключается в том, что определяют координаты индицируемых в поле зрения ОГС точек цели, формируют матрицу координат, идентифицируют цель с одной из точек контура изображения цели и формируют в соответствии с координатами этой точки сигналы автосопровождения цели и управления носителем. При сближении носителя с целью измеряют максимальный угловой размер αmax изображения цели, определяют координаты геометрического центра и особых в математическом смысле точек контура изображения цели при 2β > αmax > β, где 2β - величина поля зрения ОГС и идентификация цели с ближайшей к геометрическому центру особой точкой контура. 1 з.п. ф-лы, 2 ил.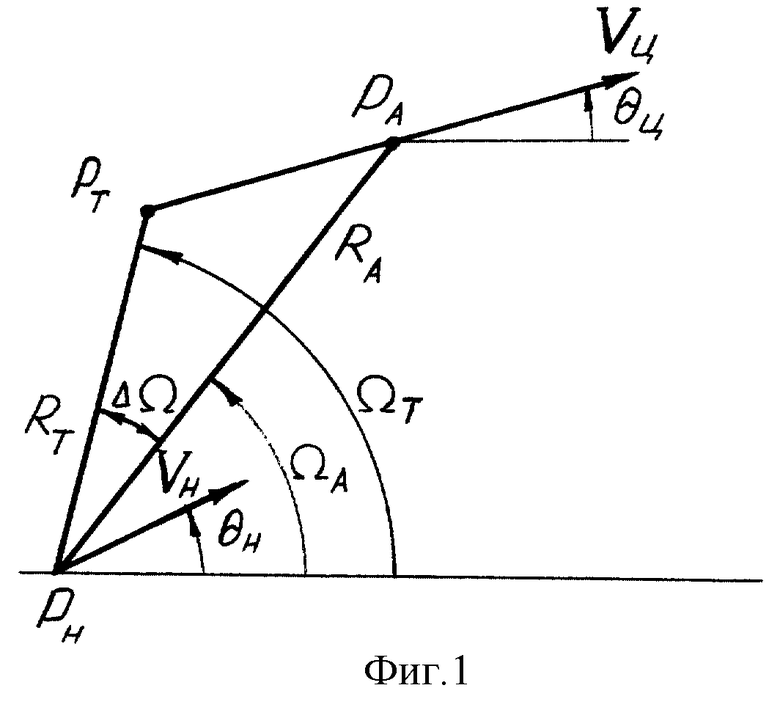
ΔΩC = Ω′max•T
где Ω′max - максимальная располагаемая ОГС угловая скорость автосопровождения цели;
ТОСТ C - допустимое время, оставшееся до встречи с целью, в момент срыва автосопровождения, с которой идентифицируют цель,
и при этом формируют дополнительный сигнал управления носителем, действующий в указанном направлении и пропорциональный величине угловой скорости
ΔΩ′= ΔΩC/(T
где ТОСТ H - интервал времени, оставшийся до встречи с целью, определяемый по изменению максимального углового размера αmax на интервале 2β > αmax> β;
t - текущее время, отсчитываемое от момента ТОСТ H до момента срыва автосопровождения цели.
| Способ возведения противофильтрационных завес | 1973 |
|
SU489841A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОСОПРОВОЖДЕНИЯ | 1993 |
|
RU2081383C1 |
| RU 2058011 C1, 10.04.1996 | |||
| Коаксиальная нагрузка | 1988 |
|
SU1597982A1 |
| US 5211356 A, 18.05.1993 | |||
| US 5323987 A, 28.01.1994 | |||
| Выхлопной трубопровод, отделяемый от выпускного отверстия, водонагревательное устройство, содержащее выхлопной трубопровод, и способ для ремонта водонагревательного устройства | 2019 |
|
RU2731785C1 |
| DE 3741856 C1, 20.04.1989 | |||
| DE 3643975 A1, 30.06.1988 | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |

