Настоящее изобретение является заявкой в частичное продолжение заявки 09/603474 от 23 июня 2000, которая подтверждается приоритетной патентной заявкой 60/141576 от 29 июня 1999.
Область техники
Настоящее изобретение относится к устройству измерения линейного перемещения.
Предшествующий уровень техники
При управлении текучей средой в промышленных процессах, например, в нефте- и газопроводах, в химических процессах и т.д., часто необходимо снижать давление или управлять давлением текучей среды. Для этих целей обычно используются регуляторы, которые обеспечивают регулирование потока через регулятор. Регулятор в данном случае управляет расходом или другими переменными процесса, но при этом обязательно происходит снижение давления как побочный результат функции управления потоком.
Регуляторы такого типа используются для распределения и передачи природного газа. Распределительная система природного газа обычно включает сеть трубопроводов от месторождения природного газа к одному или нескольким потребителям. Чтобы передавать большие объемы газа, газ сжимают, при этом повышают давление. Когда газ приближается к распределительной сети, т.е. к потребителям, давление газа понижают на станциях снижения давления. Для снижения давления газа на станциях снижения давления обычно используют регуляторы.
Для распределительных систем природного газа важно обеспечивать достаточные объемы газа потребителям. Пропускная способность такой системы обычно определяется давлением системы, размером трубопровода и регуляторами, часто пропускную способность системы оценивают, используя имитационную модель. Точность модели системы определяют, используя данные потока в различных входных точках, точках снижения давления и выходных точках. Точки снижения давления значительно влияют на пропускную способность газораспределительной системы, и поэтому для определения модели системы важно точно моделировать точки снижения давления. Однако эти точки снижения давления находятся внутри распределительной системы, и поэтому не рассматриваются как контролируемые точки распределения, т.е. точки, в которых поток газа переключают от распределительной системы к потребителю. В результате, в точках снижения давления обычно не обеспечивается измерение потока. Кроме того, поскольку точки снижения давления не являются контролируемыми точками распределения, не требуется высокая точность. Проблемы измерения потока, аналогичные вышеописанным, связанным с распределением природного газа, также присутствуют в других случаях применения регуляторов, т.е. в промышленных процессах, в химических процессах и т.д.
Кроме того, регуляторы подвержены отказам, обусловленным износом, что снижает способность управлять давлением в трубопроводе. При повреждении регулятора может происходить утечка текучей среды, тем самым повышая потери текучей среды и, возможно, создавая опасную ситуацию. Хотя поврежденные регуляторы можно отремонтировать или заменить, часто трудно выявить, когда регулятор вышел из строя, а также определить, какой регулятор поврежден. Выявить отказ и определить, какой регулятор поврежден, оказывается более трудной задачей в обычных системах доставки природного газа, где трубопроводы могут иметь протяженность в несколько миль. Соответственно, очень желательно устройство, которое выявляет отказ приборов и идентифицирует неисправность прибора.
Чтобы обеспечивать обратную связь по рабочим параметрам, устройство измерения линейного перемещения часто снабжается оборудованием, имеющим подвижные детали, например, регулятор с дросселирующим элементом. В частности, чтобы иметь информацию относительно положения дросселирующего элемента, часто используются датчики поля. Датчики поля обычно содержат магнит и датчик магнитного поля, которые перемещаются друг относительно друга в соответствии с положением дросселирующего элемента. Магнит создает конфигурацию магнитного потока, которая воспринимается датчиком магнитного поля. В результате, изменения в магнитном потоке могут использоваться для того, чтобы определить положение магнита и, следовательно, дросселирующего элемента. Магнит должен удерживаться на том же самом продольном расстоянии и в той же самой ориентации относительно датчика, иначе конфигурация магнитного потока, генерируемая магнитным полем, будет изменяться, и обратная связь линейного перемещения будет искаженной и неточной.
Краткое изложение существа изобретения
В основу настоящего изобретения поставлена задача создания самоцентрирующейся магнитной сборки для устройства измерения линейного перемещения.
В соответствии с одним аспектом настоящего изобретения предложен регулятор давления, содержащий главный корпус, имеющий впускное и выпускное отверстия, причем поток текучей среды проходит между впускным и выпускным отверстиями, дросселирующий элемент, способный перемещаться по пути потока текучей среды, и датчик положения дросселирующего элемента, который включает магнитный корпус, поддерживаемый в фиксированном положении по отношению к главному корпусу и задающий внутреннюю поверхность, причем размеры магнита подобраны для размещения в магнитном корпусе и для движения с дросселирующим элементом, магнит имеет северный полюс и южный полюс, между которыми генерируется магнитный поток, а между магнитом и магнитным корпусом расположено центрирующее кольцо, которое включает смещенную стенку для центрирования магнита в магнитном корпусе, и датчик магнитного поля для детектирования магнитного потока.
В соответствии с дополнительными аспектами настоящего изобретения, магнитная сборка предназначена для использования с датчиком магнитного потока и для формирования датчика положения, для определения положения подвижной детали. Магнитная сборка содержит магнитный корпус, имеющий внутреннюю поверхность, и магнит, имеющий размеры, необходимые для размещения в магнитном корпусе, предназначенный для перемещения с подвижной деталью, причем магнит имеет северный полюс и южный полюс, между которыми формируется магнитный поток. Между магнитом и магнитным корпусом расположено центрирующее кольцо, причем центрирующее кольцо имеет смещенную стенку для центрирования магнита в магнитном корпусе.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает схему регулятора с устройством измерения потока, согласно изобретению;
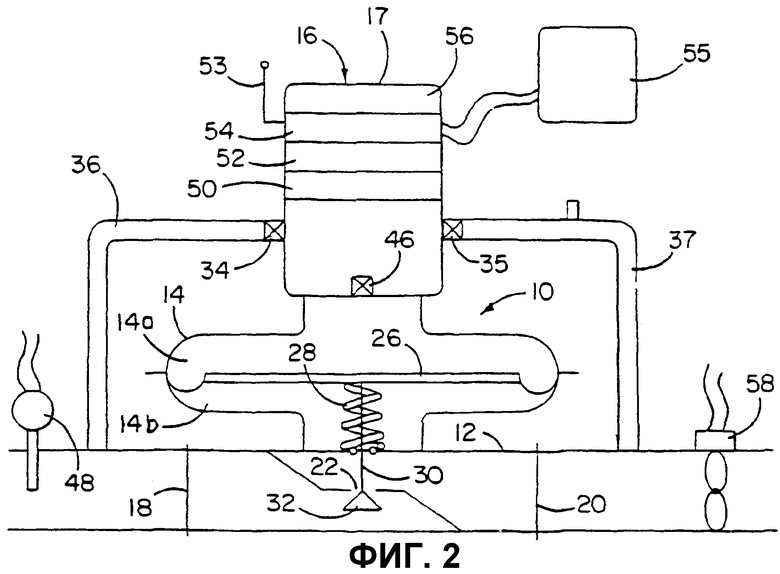
фиг.2 изображает схему дополнительного варианта воплощения регулятора, содержащего устройство измерения потока, согласно изобретению;
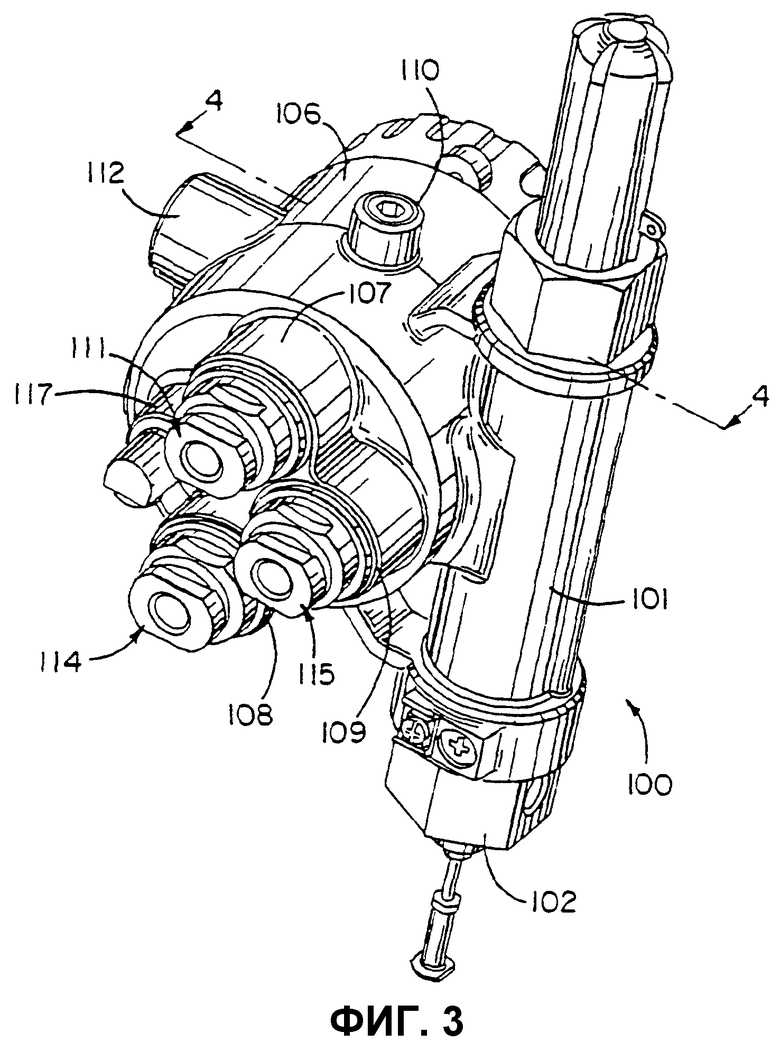
фиг.3 изображает общий вид устройства измерения потока через регулятор, согласно изобретению;
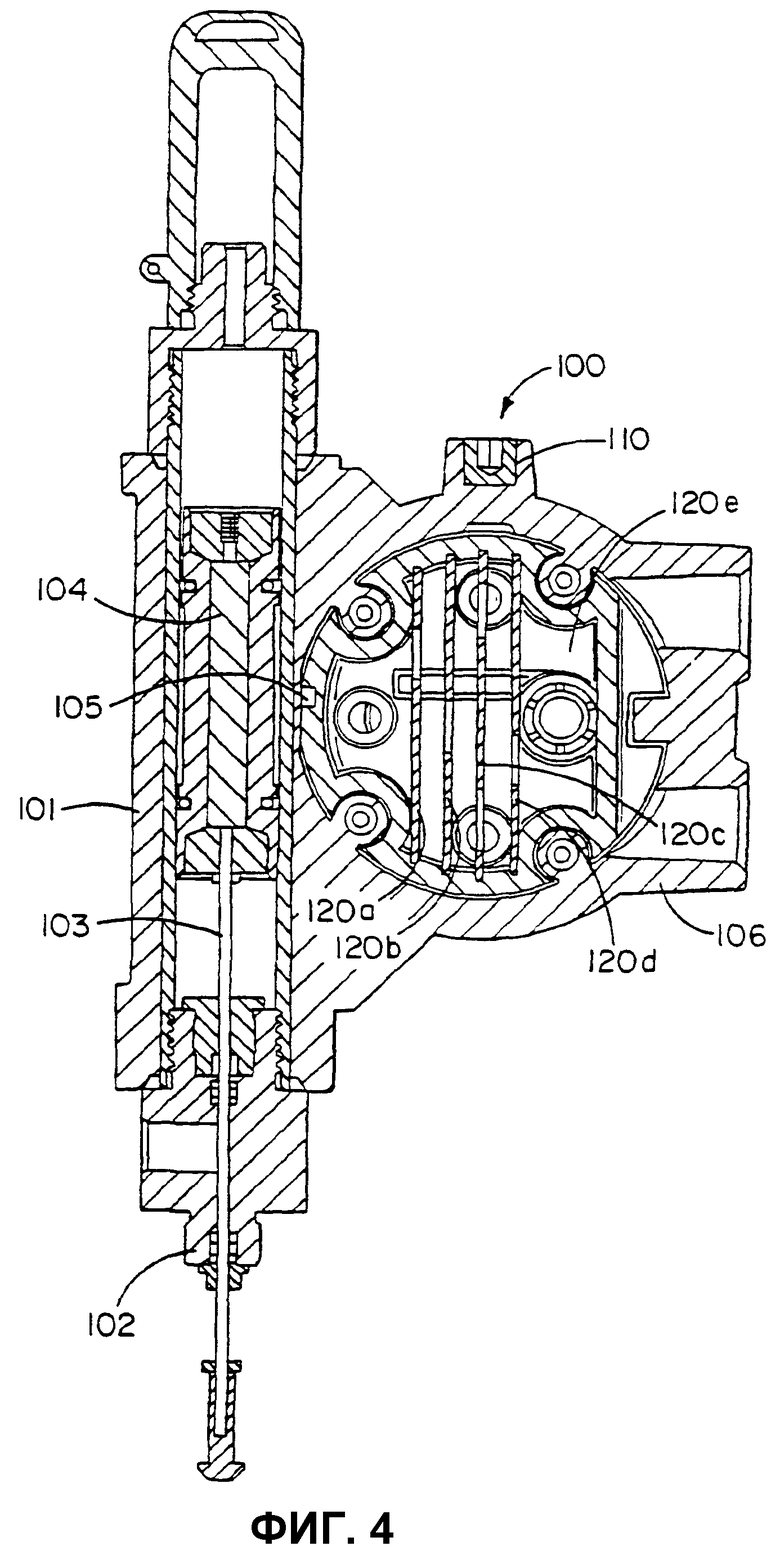
фиг.4 изображает вид сбоку устройства измерения потока через регулятор (поперечный разрез), согласно изобретению;
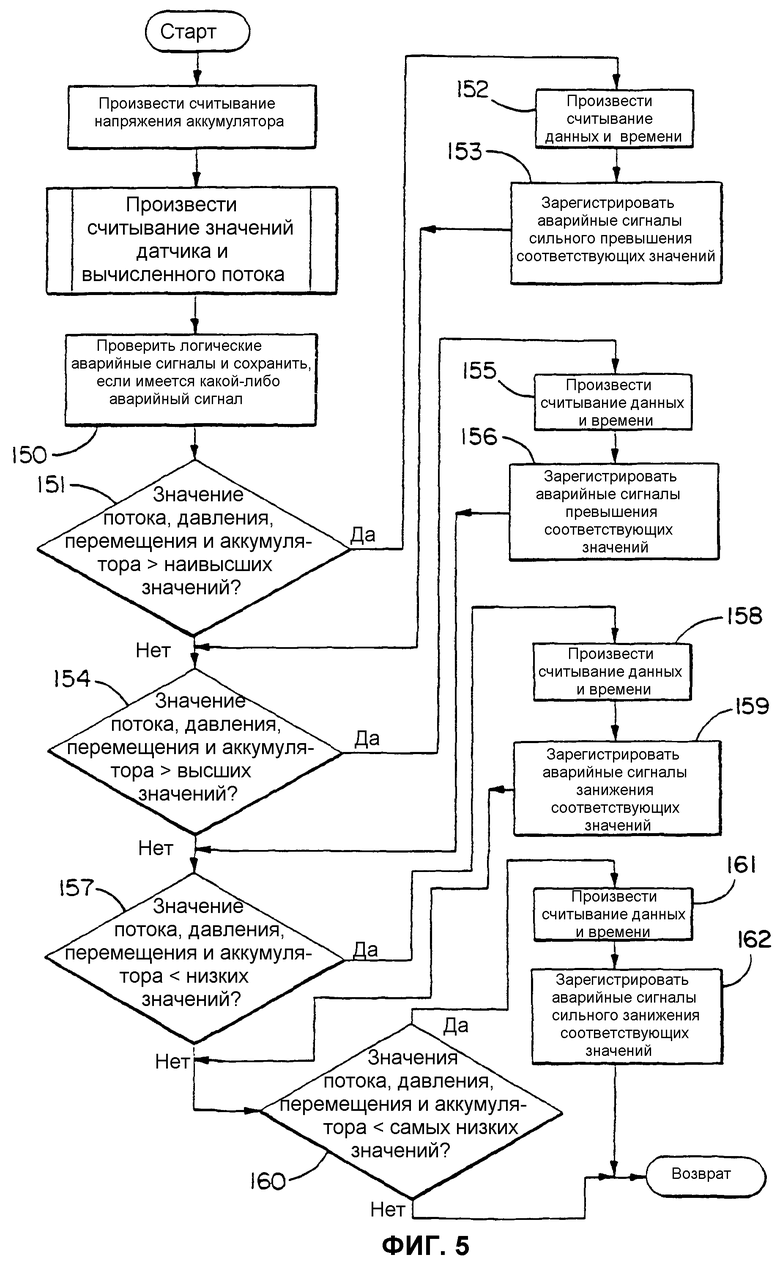
фиг.5 изображает блок-схему алгоритма аварийной сигнализации введенных пользователем предельных значений, согласно изобретению;
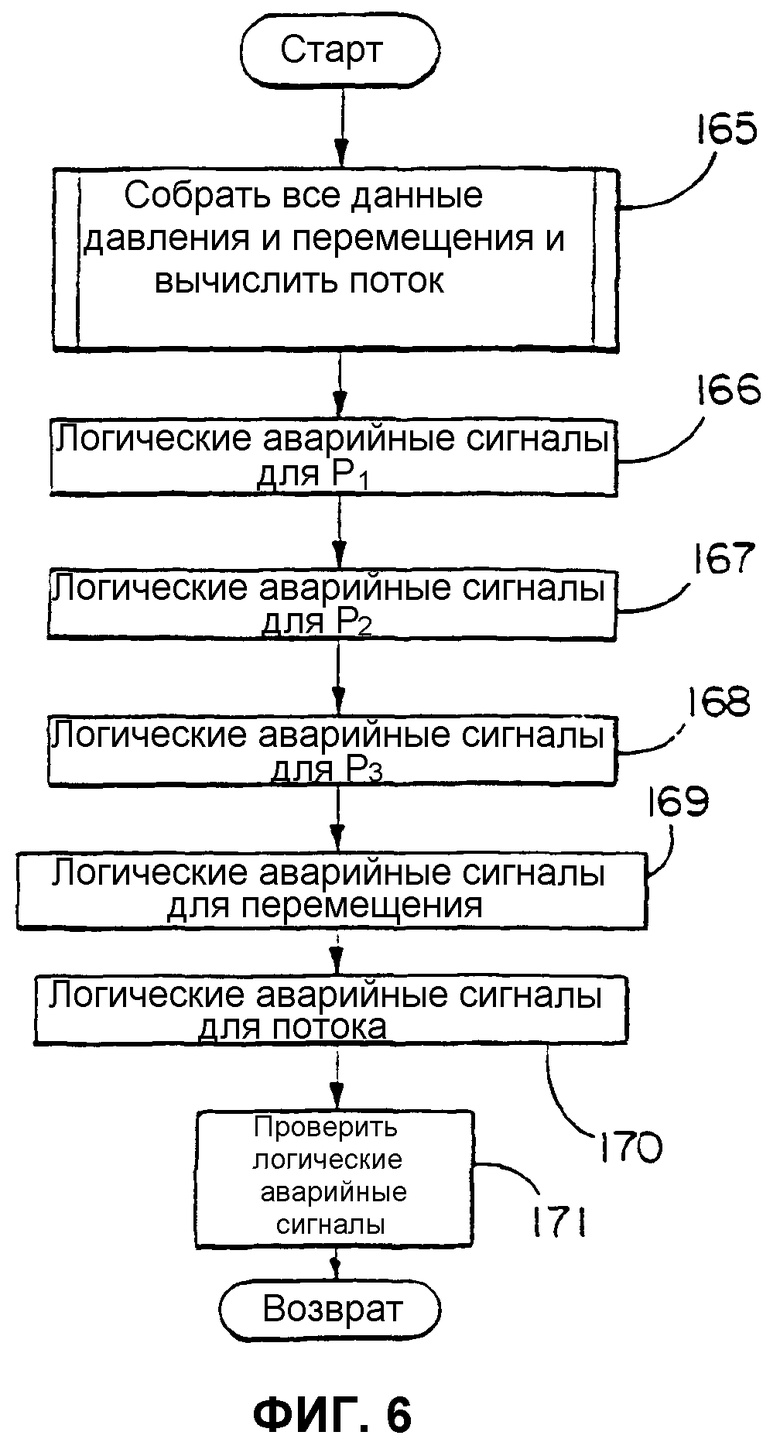
фиг.6 изображает блок-схему алгоритма подпрограммы аварийной сигнализации, согласно изобретению;
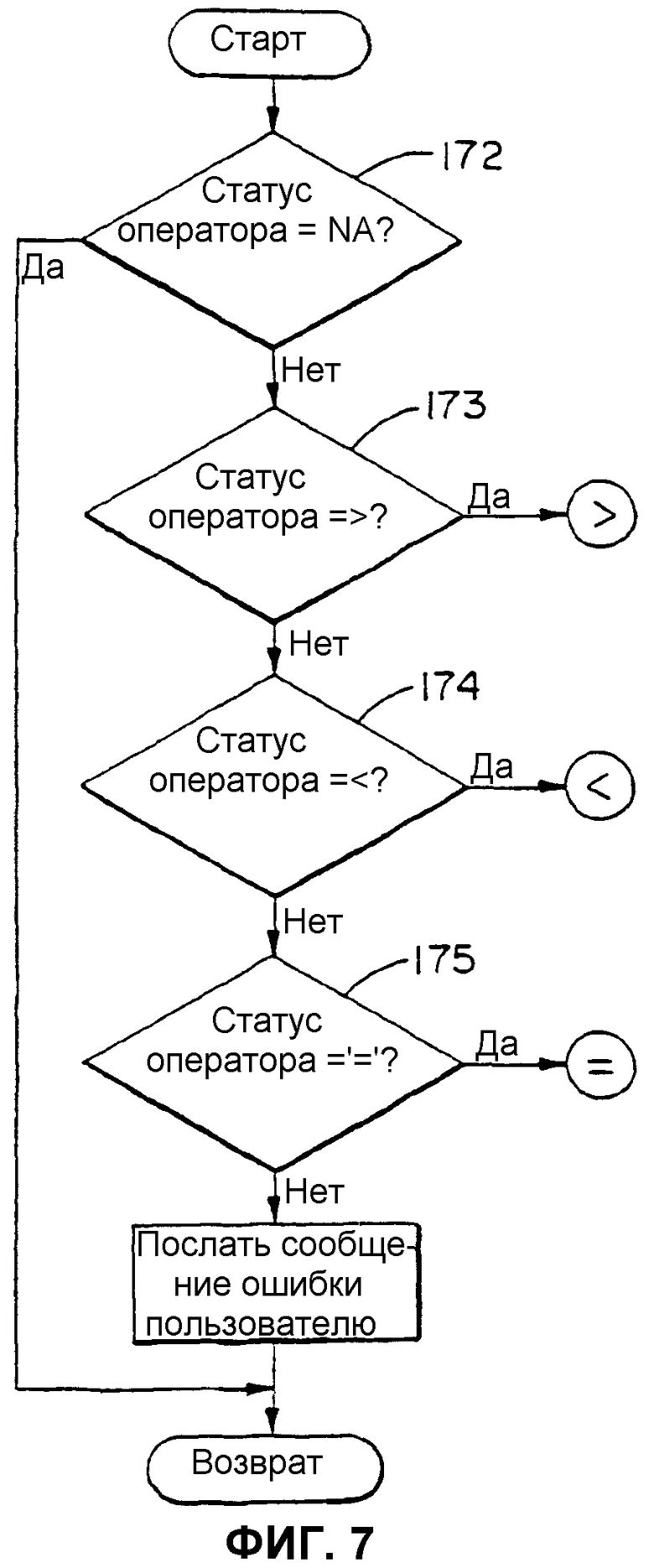
фиг.7А-7Д изображают блок-схемы алгоритма части логической подпрограммы аварийной сигнализации, согласно изобретению;
фиг.8 изображает вид сбоку магнитной сборки (продольный разрез), предназначенной для использования в устройстве измерения линейного перемещения, согласно изобретению;
фиг.9 изображает схему конфигурации потока, согласно изобретению;
фиг.10 изображает вид сбоку альтернативного варианта воплощения магнитной сборки (продольный разрез), согласно изобретению;
фиг.11 изображает вид сбоку еще одного альтернативного варианта воплощения магнитной сборки (продольный разрез), согласно изобретению.
Подробное описание предпочтительных вариантов воплощения изобретения
На Фиг.1 показан предпочтительный вариант воплощения регулятора давления текучей среды, например, регулятора 10 давления газа. Регулятор 10 давления газа содержит устройство измерения потока газа (описано ниже), в котором для вычисления потока и другой информации осуществляют измерения давления против течения, давления по течению и отверстия дросселя. Также можно использовать регулятор давления жидкости, поскольку иллюстрируемый регулятор давления газа просто является одним примером регулятора давления текучей среды согласно настоящему изобретению.
Регулятор содержит основание 12, корпус 14 мембраны и верхний корпус 16. В основании 12 регулятора выполнено впускное отверстие 18 для присоединения к трубопроводу против течения и выпускное отверстие 20 для присоединения к трубопроводу по течению. Дроссель 22 в основании 12 регулятора устанавливает сообщение между впускным отверстием 18 и выпускным отверстием 20.
Внутри корпуса 14 мембраны установлена мембрана 26, которая делит корпус 14 на верхнюю и нижнюю части 14а, 14b. Пружинный манометр 28 прикреплен к центру мембраны 26 и расположен в нижней части корпуса 14б мембраны, чтобы смещать мембрану 26 в направлении против течения.
Стержень 30 прикреплен к мембране 26 и перемещается вместе с ней. Дросселирующий элемент, такой как клапанный диск 32, прикреплен к концу стержня 30 и расположен ниже дросселя 22. Клапанный диск 32 имеет размеры, подобранные таким образом, чтобы полностью блокировать дроссель 22, тем самым, прерывая сообщение от впускного отверстия 18 к выпускному отверстию 20. Следует понимать, что пружинный манометр 28 смещает клапанный диск 32 в направлении против течения, закрывая дроссель 22. Клапанный диск 32 формируется с варьируемым поперечным сечением так, чтобы по мере того, как клапанный диск 32 двигается по течению, незаблокированная (или открытая) область дросселя 22 постепенно увеличивалась. В результате открытая область дросселя 22 непосредственно связана с положением клапанного диска 32.
Давление газа в верхней камере мембраны 14а управляется так, чтобы перемещать клапанный диск 32 между закрытым и открытым положениями. Давление в верхней камере корпуса 14а может быть обеспечено несколькими различными способами. В настоящем варианте воплощения давление в верхней части 14а управляется управляющим механизмом нагрузки (не показан). Однако регулятор 10 может быть регулятором типа управляющего механизма разгрузки, или самоуправляемым или нагруженным давлением.
В другом альтернативном варианте для управления давлением газа в верхней части корпуса 14а мембраны устройство содержит первую трубу, проходящую от трубопровода против течения к верхней части корпуса 14а мембраны, с первым соленоидом, управляющим посредством этого потоком газа через трубу. Также имеется вторая труба, которая проходит от верхней части корпуса 14а мембраны к трубопроводу по течению и имеет второй соленоид для управления потоком газа. К первому и второму соленоидам подключен ПК (персональный компьютер) для управления их работой. Чтобы увеличить давление в верхней части корпуса 14а мембраны, первый соленоид открывается для создания давления против течения в верхнюю часть, тем самым направляя мембрану 26 вниз, чтобы открыть дроссель 22. Газ может быть выпущен через второй соленоид, чтобы снизить давление в части 14а против течения и поднять мембрану 26, тем самым, закрывая дроссель 22. Независимо от способа обеспечения и управления давлением, следует понимать, что увеличенное давление двигает мембрану 26 и прикрепленный клапанный диск 32 вниз, чтобы открыть дроссель 22, в то время как пониженное давление закрывает дроссель 22. Указанная установка приведена в качестве примера и не ограничивает настоящее изобретение.
Датчики давления предназначены для измерения уровня давления P1, P2 против течения и по течению. Как показано на фиг.1, первый и второй датчики 34, 35 давления монтируются в верхний корпус 16. Трубопровод 36 проходит от первого датчика 34 давления, ответвляясь в трубопровод, расположенный против течения впускного отверстия 18 регулятора. Дополнительный трубопровод 37 проходит от второго датчика 35 давления, ответвляясь в трубопровод, расположенный по течению выпускного отверстия 20 регулятора. Первый и второй датчики 34, 35 давления закреплены на верхнем корпусе 16, трубопроводы 36, 37 связывают давление газа против течения и по течению, соответственно, с первым и вторым датчиками 34, 35 давления. Альтернативно, первый и второй датчики 34, 35 давления могут быть расположены непосредственно в трубопроводе против течения и по течению с проводкой, проходящей от датчиков давления к верхнему корпусу 16. Чтобы обеспечить температурную коррекцию, в трубопроводе против течения располагается термодатчик 48 рабочей текучей среды, который измеряет рабочую температуру.
Верхний корпус 16 дополнительно содержит датчик для определения положения клапанного диска. Согласно показанному варианту воплощения, стержень 30 прикреплен к клапанному диску 32 и соединен с мембраной 26. Индикатор 40 перемещения, который предпочтительно является продолжением стержня 30, проходит от мембраны в верхний корпус 16, чтобы положение клапанного диска 32 соответствовало положению индикатора 40 перемещения. Поэтому датчик содержит механизм, воспринимающий перемещение индикатора, предпочтительно датчик, работающий на эффекте Холла. Датчик на эффекте Холла содержит магнит 42, вызывающий эффект Холла, прикрепленный к верхнему концу индикатора 40 перемещения. Для восприятия положения магнита 42, вызывающего эффект Холла, внутри верхнего корпуса 16 располагается магнитный датчик 44. Детектируя положение магнита 42, можно определить положение клапанного диска 32, и, следовательно, открытую область дросселя 22. Второй индикатор перемещения (не показан) может быть связан с индикатором 40 перемещения, чтобы обеспечить визуальную индикацию перемещения клапанного диска. Второй индикатор перемещения проходит вверх от индикатора 40 перемещения и через верхний корпус 16 над верхней поверхностью верхнего корпуса 16.
В альтернативном варианте воплощения, показанном на фиг.2, чтобы вывести положение клапанного диска, измеряется давление нагрузки в верхней части корпуса 14а мембраны. Следует понимать, что положение клапанного диска 32 варьируется с давлением, имеющимся в верхней части 14а корпуса мембраны. В указанном варианте воплощения, в верхнем корпусе 16 установлен датчик 46 давления нагрузки, предназначенный для измерения давления на верхней части корпуса 14а мембраны. Затем измеренное давление нагрузки может быть использовано для определения положения клапанного диска.
Возвратимся к варианту воплощения, изображенному на фиг.1, в котором первый и второй датчики 34, 35 давления и датчик 44 перемещения формируют выходной сигнал, который поступает в электронный модуль 50 потока. Электронный модуль 50 потока может быть выполнен интегрально с регулятором, например, в верхнем корпусе 16, или может быть расположен дистанционно. Давление у впускного отверстия, давление у выпускного отверстия и положение клапанного диска используются для определения потока через варьируемый дроссель регулятора 10. Для субкритического потока газа, расход вычисляют, используя алгоритм

где: F - расход;
K1 - абсолютная температурная постоянная;
G - удельный вес сред потока;
T - абсолютная температура сред потока;
K2 - постоянная положения стержня;
Y - положение стержня;
P1 - абсолютное давление против течения;
K3 - постоянная формы триммера;
P2 - абсолютное давление по течению.
Константы K2, K3 положения стержня и формы триммера являются специфическими для конкретного размера и типа регулятора и, прежде всего, зависят от размера и формы триммера. Как должно быть понятно специалистам, произведение K2 и Y может быть эквивалентно обычному коэффициенту масштабирования потока. Вышеупомянутый алгоритм является подходящим для вычисления субкритического (то есть, P1-P2<0,5P1) расхода газа через регуляторы типа линейных металлических триммерных клапанов.
Для критических потоков газа вычисление модифицируют путем устранения синусоидальной функции. Для других типов регуляторов, таких как нелинейный металлический триммер и регуляторы эластомерного типа, используется подобный алгоритм, однако постоянная положения стержня K2 становится функцией, связанной с падением давления ΔP(то есть, разностью давлений P1, P2 против течения и по течению), и/или положением стержня клапана, что хорошо известно в технике. Для потока жидкости уравнение принимает вид:

где: F - расход;
K1 - абсолютная температурная постоянная;
G - удельный вес сред потока;
T - абсолютная температура сред потока;
K2 - постоянная положения стержня;
Y - положение стержня;
P1 - абсолютное давление против течения;
K3 - постоянная формы триммера;
P2 - абсолютное давление по течению.
Подобное вычисление используется в варианте воплощения, показанном на фиг.2, где измеряют давление нагрузки в верхней части корпуса 14а мембраны, чтобы вывести перемещение клапанного диска, за исключением того, что постоянная давления нагрузки, K4, и давление нагрузки манометра, PL,заменяют значения постоянной положения стержня K2 и положения стержня Y. Постоянная давления нагрузки K4 также является константой и должна определяться для каждого типа регулятора 10. Для нелинейных эластомерных дросселирующих деталей, постояннаядавления нагрузки K4 является функцией параметров ΔP и PL.
В предпочтительном варианте воплощения модуль 52 просмотра локального потока также расположен внутри верхнего корпуса 16. Модуль 52 просмотра локального потока содержит электронный сумматор потока, который обеспечивает итоговую информацию потока. Модуль 52 просмотра локального потока дополнительно имеет выходной порт, который обеспечивает возможность доступа для ручного устройства связи для получения доступа к итоговому потоку и для сброса сумматора локального потока для будущего использования. В предпочтительном варианте воплощения модуль 52 просмотра локального потока содержит жидкокристаллический (ЖКД) считыватель, инкапсулированный внутри верхнего корпуса 16. Крышка 17, прикрепленная к вершине верхнего корпуса 16, имеет прозрачное пластмассовое окошко, которое позволяет просматривать ЖКД считыватель.
Модуль 54 связи передает данные потока во вспомогательное устройство 55 связи, такое, как удаленное оконечное устройство (УОУ), ПК или любой другой прибор, способный опрашивать средства управления регулятора. Модуль 54 связи может включать антенну 53 для передачи информации потока в удаленную систему считывания измерителя (не показана). Также имеется силовой модуль 56 для запитывания механизма измерения потока. Силовой модуль 56 обеспечивает стабилизированное напряжение для всего устройства и может получать питание от любого известного источника такого, как солнечная энергия, аккумулятор и источники постоянного и переменного тока.
Следует понимать, что электронный модуль 50, модуль 52 просмотра локального потока, модуль 54 связи и силовой модуль 56 могут быть установлены отдельно (фиг.1) или могут быть установлены на одной главной печатной плате, расположенной внутри верхнего корпуса 16.
Вычисленный расход через регулятор 10 может быть быстро и легко откалиброван с использованием отдельного расходомера 58. Расходомер 58, который может быть турбинным или измерителем другого типа, на время вставляется в трубопровод по течению для измерения действительного потока текучей среды. Расходомер 58 обеспечивает обратную связь со вспомогательным устройством 55 связи (УОУ, ПК, и т.д.) или непосредственно с главной печатной платой. Обратная связь необходима для генерации интеграла ошибок на основе наблюдаемых условий потока, который затем вводится в вычисления потока, выполненные регулятором 10, обеспечивая более точные данные потока.
Предпочтительный вариант воплощения устройства измерения линейного перемещения через регулятор и диагностического устройства 100 показан на фиг.3. Устройство 100 содержит магнитный корпус 101, имеющий первый конец 102 для присоединения к корпусу 14 мембраны регулятора. Магнитный корпус 101 определяет внутреннюю полость 250 и содержит индикатор 103 перемещения (фиг.4), который предназначен для соединения с мембраной 26 (фиг.1) в регуляторе.
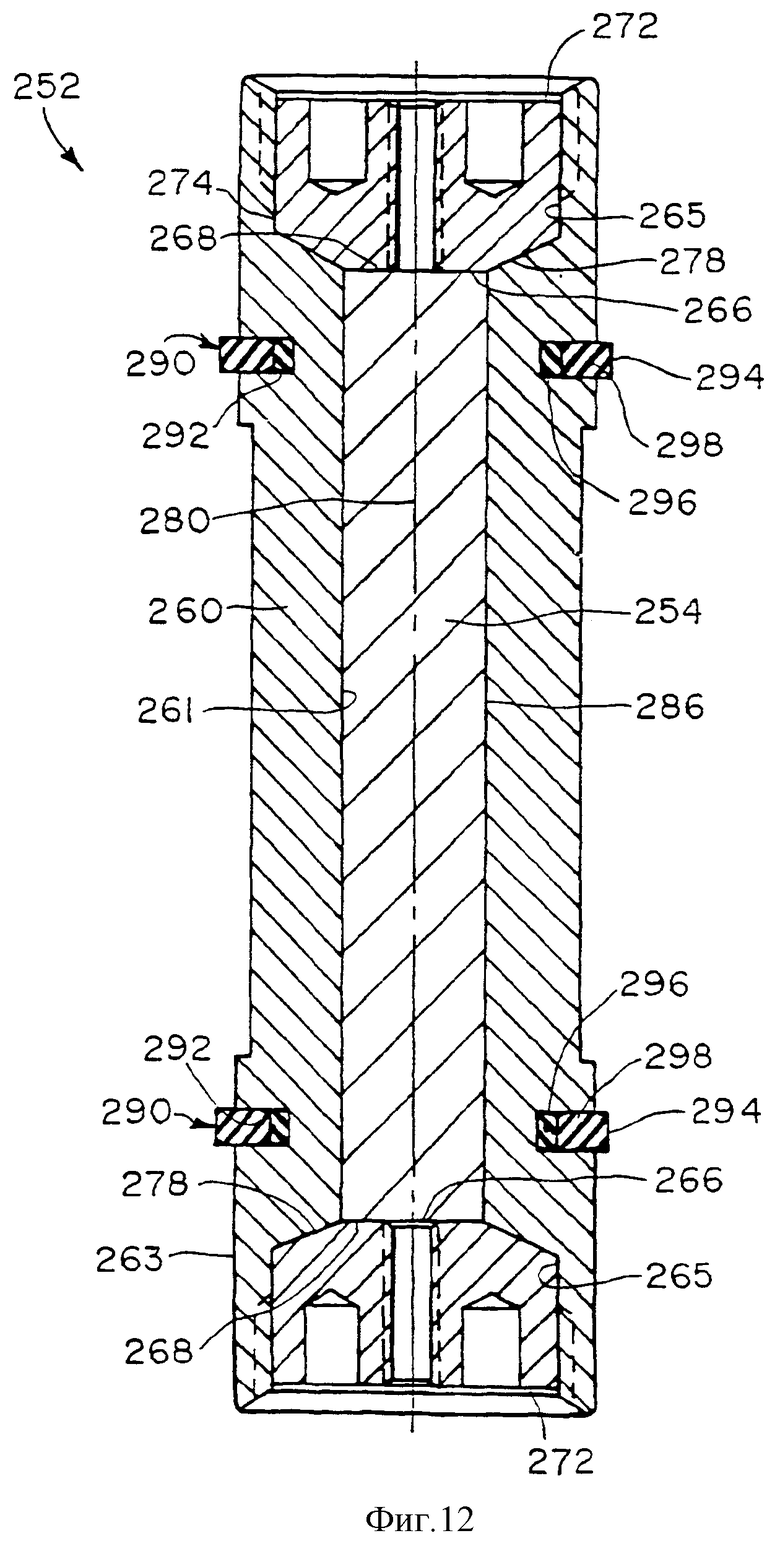
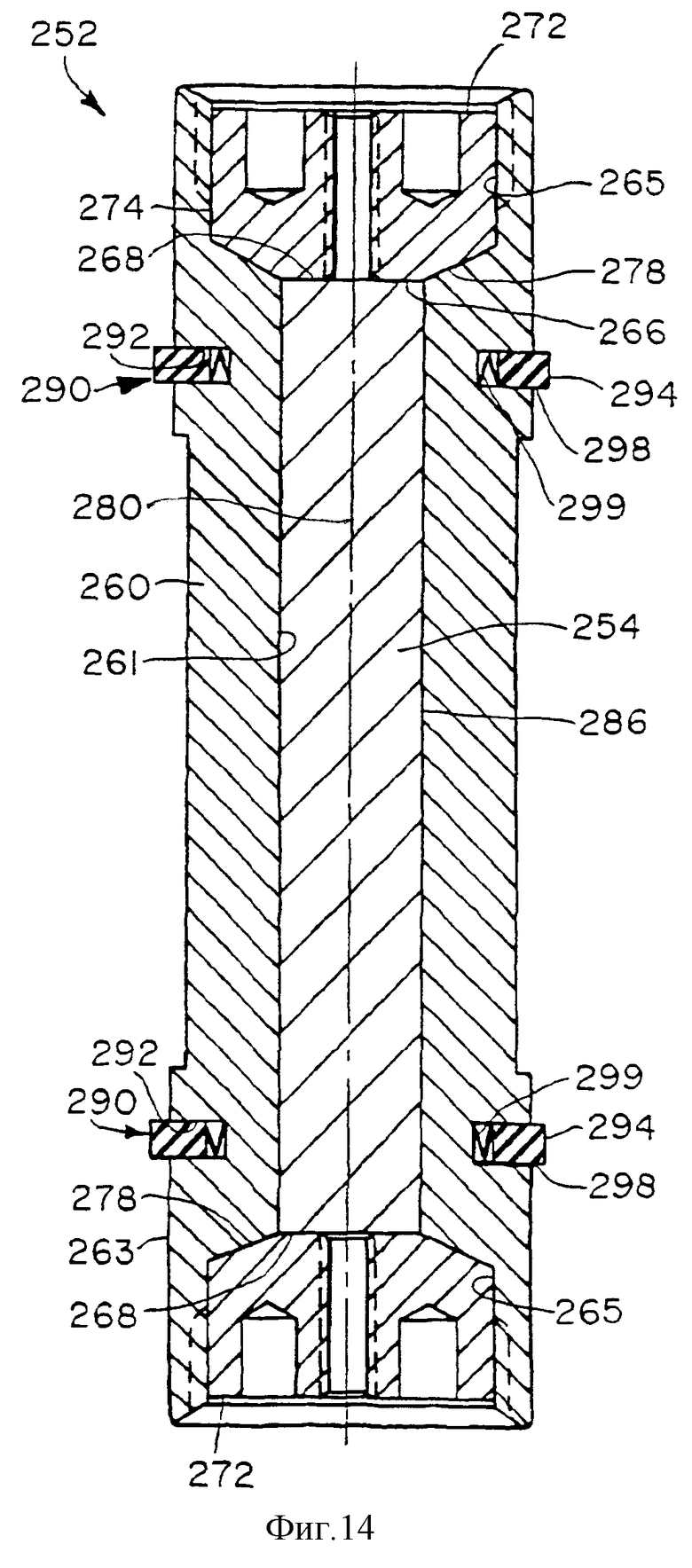
Магнитная сборка 252 расположена внутри магнитного корпуса 101 для обеспечения конфигурации магнитного потока. Магнитная сборка 252 (фиг.4, 8 и 9) содержит монолитный стержневой магнит 254, предпочтительно имеющий цилиндрическую форму, имеющий северный полюс 256 и южный полюс 258. Магнит 254 является постоянным магнитом из магнитного материала Alnico V, который служит источником постоянного магнитного потока. Предпочтительно, магнит 254 упакован в челнок 260, имеющий центральное расточенное отверстие 261 с размерами, необходимыми для размещения магнита 254. Челнок 260 выполнен из немагнитного материала, предпочтительно алюминия или керамики, и имеет внешнюю поверхность 263, имеющую размеры, подобранные таким образом, чтобы путем скольжения входить во внутреннюю полость 250 магнитного корпуса 101. Челнок 260 может состоять из двух частей или быть в виде грейферного корпуса, скрепляемого подходящим зажимом.
В варианте воплощения, показанном на фиг.8, формирующие поток полюсные наконечники 262, 264 на резьбе закрепляются внутри противоположных концевых пазов 265 челнока 260, чтобы придать форму магнитному потоку, генерируемому магнитом 254. Каждый из полюсных наконечников 262, 264 имеет торец 266, расположенный напротив и упирающийся в торцы 268 противоположного концевого полюса магнита 254 (фиг.9). Полюсные наконечники 262, 264 из подходящего магнитного материала, такого как холоднокатанная сталь марки G10100, предпочтительно являются цилиндрическими по форме, имеющими противоположные круговые поверхности 266, 272 и цилиндрическую поверхность 274, расположенную в пространстве, где размещен датчик 276 магнитного поля. Поверхность 278 в форме усеченного конуса образует переход между поверхностями 266, 272 и цилиндрической поверхностью 274 и также размещена в пространстве, где размещен датчик 276 магнитного поля.
В предпочтительном варианте воплощения изобретения магнит 254 имеет диаметр около 0,375 дюйма и длину приблизительно 2,5 дюйма. Диаметр круговых торцов 266 на полюсных наконечниках 262, 264 составляет около 0,375 дюйма, а цилиндрическая поверхность 274 имеет диаметр около 0,8125 дюйма и длину по оси 280 около 0,125 дюйма. Поверхность 278 в форме усеченного конуса расположена под углом около 20о к поверхности 266. Датчик 276 магнитного поля монтируется на корпус клапана или другой стационарный предмет и ориентируется вдоль оси 282, параллельной оси 280. Челнок 260 устроен так, что перемещается вдоль оси 280. Для описанного устройства ось 282 отстоит на 0,625 дюйма от оси 280.
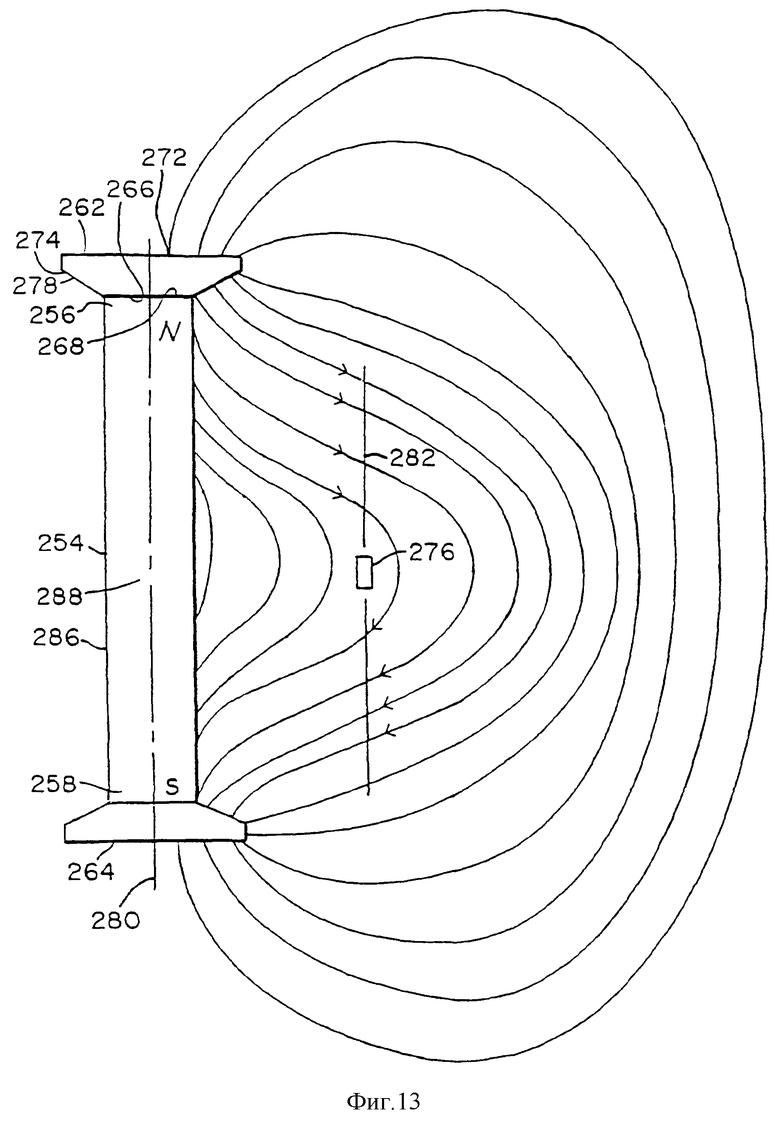
В изобретении важно, чтобы цилиндрическая поверхность 274 была параллельной и коаксиальной с осью 280 и поверхностью 286 магнита 254. Указанное соотношение осуществляется посредством кругового торца 266 на полюсном наконечнике, размещенного напротив кругового торца 268 магнитного полюса, и коаксиально поверхностям 266 и 274. В результате поток магнитного поля симметрично конфигурируется вокруг оси 280 магнита. Длина магнита 254 (фиг.9) в направлении вдоль оси 280, а также взаимное расположение цилиндрической поверхности 274 и поверхности 278 в форме усеченного конуса, придают такую конфигурацию магнитному потоку в области, смежной магниту 254, что магнитный поток варьируется линейно вдоль оси 282 параллельно оси 280. Поэтому магнитный датчик 276 смещения воспринимает плотность потока, которая варьируется линейно вдоль линии перемещения датчика. Вследствие того, что магнитный поток является однородным по периферии магнита, датчик является нечувствительным к относительному вращению элементов вокруг оси 280. Следовательно датчик не определяет вращение магнита 254 вокруг оси 280.
Плотность потока возрастает равномерно вдоль продольной линии 282, параллельной магниту, от средней точки 288 сборки к полюсам, чтобы максимизировать плотность потока непосредственно на противоположных полюсных торцах 274. Вследствие того, что полюса 256, 258 ориентированы противоположно, направления потока через датчик являются противоположными в областях вдоль линии 282 с каждой стороны от средней точки 288. Следовательно, плотность потока варьируется вдоль линии 282 от максимума в одном направлении, смежном полюсному торцу 274, смежному одному полюсу 256, проходя через ноль в средней точке 288, до максимума в противоположном направлении, смежном полюсному торцу 274, смежному другому полюсу 258. В средней точке 288, центрированной между полюсными наконечниками, плотность магнитного потока является нулевой. Датчик калибруется путем помещения датчика 276 в средней точке 288, где напряженность магнитного поля является нулевой, посредством калибровки датчика.
Во время работы челнок 260 совершает возвратно-поступательное движение вдоль линии 280, вызывая линейно-варьируемую конфигурацию магнитного потока магнита 254, проходя вдоль датчика 276, производя напряжение, пропорциональное относительному положению магнита 254 относительно магнитной сборки 252. Придавая форму окружающему потоку, полюсные наконечники 262, 264 линеаризуют поток по длине магнита. Таким образом, полюсные наконечники 262, 264 резко увеличивают полезную область и точность показаний напряжения, производимых датчиком 276 магнитного поля.
Пара центрирующих колец 290 предназначена для дополнительного улучшения точности показаний напряжения датчиком посредством гарантирования того, что магнитная сборка 252 центрируется в магнитном корпусе 101. На внешней поверхности 263 (фиг.8) челнока формируется пара выемок 292. Центрирующие кольца 290 вставляются в выемки 292, причем каждое имеет смещенную наружу внешнюю стенку 294. Внешняя стенка 294 находится в зацеплении с внутренней поверхностью 250 магнитного корпуса 101, центрируя, тем самым, магнитную сборку 252 внутри магнитного корпуса 101. В описываемом варианте воплощения каждое центрирующее кольцо 290 содержит внутреннее кольцо 296 О-образной формы, выполненное из относительно эластичного материала, типа резины, и внешнее кольцо 298 из относительно твердого материала, имеющего относительно низкий коэффициент трения, такого, как пластмасса, чтобы обеспечить скольжение внешнего кольца 298 по внутренней поверхности 250 магнитного корпуса. Следует понимать, что для смещения внешней стенки 294 наружу, могут быть использованы другие материалы. Например, в варианте воплощения, показанном на фиг.10, каждое центрирующее кольцо 290 имеет внутреннюю деталь, содержащую кольцевую пружину 299, и внешнюю деталь, содержащую пластмассовое внешнее кольцо 298. Кольцевая пружина 299 может быть сформирована из металла, например, из стали.
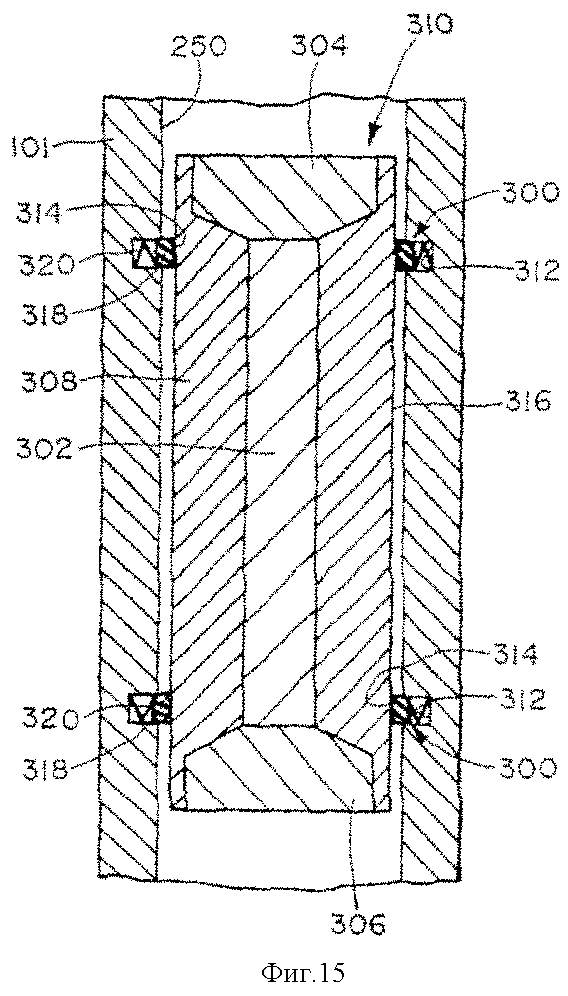
В альтернативном варианте воплощения, показанном на фиг.11, используется пара центрирующих колец 300, которые генерируют направленную внутрь силу для центрирования магнита 302 в магнитном корпусе 101. Полюсные наконечники 304, 306 расположены на противоположных концах магнита 302 для придания формы магнитному потоку. Челнок 308 предназначен для упаковки магнита 302 и полюсных наконечников 304, 306 в интегральную магнитную сборку 310. На внутренней поверхности 250 магнитного корпуса 101 формируются выемки 312, имеющие размеры, подобранные для размещения внешних частей центрирующих колец 300. Каждое центрирующее кольцо 300 содержит внутреннюю стенку 314, которая смещается внутрь для зацепления с внешней поверхностью 316 челнока 308. Каждое центрирующее кольцо 300 содержит внутреннюю твердую деталь - внутреннее пластмассовое кольцо 318, имеющее внутреннюю стенку 314. Каждое центрирующее кольцо 300 дополнительно содержит эластичную внешнюю деталь, такую как внешняя кольцевая пружина 320, которая размещена на внутреннем пластмассовом кольце 318, смещая внутреннюю стенку 314. В результате магнит 302 центрируется внутри магнитного корпуса 101.
Хотя в каждом из описанных вариантов воплощения использовано два центрирующих кольца, понятно, что можно использовать одно центрирующее кольцо, в зависимости от относительных длин смещенной стенки и магнита. Более того, можно использовать более двух центрирующих колец, не выходя за рамки настоящего изобретения.
Электрический корпус 106 прикрепляется к магнитному корпусу 101 и имеет первый вход 107 давления и второй вход 108 давления, вспомогательный вход 109 давления и вспомогательный вход 110 давления (фиг.3). Первая сборка 111 датчика давления вставляется в первый вход 107 давления и труба (не показана) соединяет сборку 111 с секцией против течения потока. Вторая сборка 114 датчика давления вставляется во второй вход 108 давления и труба (не показана) соединяет вторую сборку 114 с секцией по течению потока. Третья сборка 115 датчика давления может быть вставлена во вспомогательный вход 109 давления для измерения третьей точки давления. Третий датчик 115 давления может быть использован для измерения давления в разных местоположениях, например, в потоке или в регуляторе, чтобы вывести перемещение перемычки, как описано более подробно для предыдущего варианта воплощения. В предпочтительном варианте воплощения, четвертый вход 117 давления предназначен для измерения атмосферного давления. Вспомогательный вход 110 предназначен для приема дискретного или аналогового входного сигнала из другого прибора, например, термодатчика 48 (фиг.1). Кроме того, имеется вход 112 ввода/вывода для подсоединения внешнего устройства, как описано ниже.
Для управления различными операциями устройства 100 (фиг.4) внутри корпуса расположено множество печатных плат 120a-e. В иллюстрируемом варианте воплощения, первая (или главная) печатная плата 120а может включать интерфейс для первого, второго, третьего датчиков давления и датчиков атмосферного давления, а также соединение для датчика 276 магнитного поля. Вторая печатная плата (коммуникационная печатная плата) 120b обеспечивает интерфейс связи с внешними устройствами. Вторая печатная плата 120b может включать соединение для проводной передачи, например, модемную карту, драйвер связи RF232 и модем CDPD. В дополнение или в качестве альтернативы может быть использован приемопередатчик для беспроводной связи. Третья (или главная) печатная плата 120c предпочтительно содержит процессор, память, часы в реальном масштабе времени и драйверы связи для двух каналов. Процессор может включать один или более указанных выше алгоритмов для вычисления расхода, а блок памяти ежедневно может сохранять выбранные параметры, такие как высокое и низкое давление. Не являющаяся обязательной четвертая печатная плата 120d обеспечивает интерфейс для вспомогательного устройства связи 55. Также используется пятая (или концевая) плата 120e, имеющая стабилизатор электропитания, полевое оконечное устройство для соединения к устройствам ввода/вывода, дублирующий источник питания и соединения, в которые могут быть вставлены разъемы других плат 120a-d. Хотя в иллюстрируемом варианте воплощения описано пять печатных плат 120a-e, должно быть понятно, что не выходя за рамки настоящего изобретения может быть использована одна печатная плата, менее пяти печатных плат или более пяти печатных плат.
Связь между устройством 100 и внешним устройством может осуществляться посредством радиочастотного модема, сети Ethernet или с помощью других подобных средств связи. Процессор позволяет внешним устройствам вводить в устройство 100 информацию, такую как установочные точки желательного давления и условия аварийной сигнализации, а также принимать данные, хранящиеся в памяти. Принятые данные могут включать запись аварийной сигнализации и сохраненные рабочие параметры. Например, искомая информация может включать динамику изменения значений давления против течения и по течению, периодически сохраняемых в памяти, так что устройство 100 обеспечивает функцию регистратора давления.
В соответствии с некоторыми аспектами настоящего изобретения, процессор содержит программу для генерации аварийных сигналов. Первая часть программы сравнивает измеренные параметры (то есть, давление против течения, давление по течению и положение перемещения) с некоторыми предельными значениями, определенными пользователем, что схематически иллюстрируется на фиг.5. Кроме того, могут работать одна или более логических подпрограмм, которые сравнивают по меньшей мере два из измеренных параметров и генерируют аварийный сигнал на основе специфической логической операции, примеры которой схематически показаны на фиг.6 и 7А-7Г.
Сначала обратимся к сигналам превышения уровня. На шаге 150 инициируется проверка для определения того, были ли введены пользователем какие-либо пределы уровня. На шаге 151, значения давления, перемещения, потока и параметры аккумулятора сначала сравниваются с введенными пользователем наивысшими предельными значениями. Если какое-либо из значений превышает наивысшие предельные значения, то на шаге 152 считываются данные и время, а на шаге 153 регистрируется аварийный сигнал превышения наивысшего значения. Затем на шаге 154 измеренные значения сравниваются с введенными пользователем высокими предельными значениями. Если какое-либо из значений превышает высокие предельные значения, то на шаге 155 дата и время считываются, и на шаге 156 регистрируется аварийный сигнал превышения высокого значения. Далее на шаге 157 значения сравниваются с введенными пользователем низкими предельными значениями. Если какое-либо из значений ниже введенного пользователем низкого предельного значения, то на шаге 158 считываются дата и время, а на шаге 159 регистрируется соответствующий аварийный сигнал занижения низкого значения. Наконец, на шаге 160 значения сравниваются с введенными пользователем самыми низкими предельными значениями. Если какое-либо из значений ниже самого низкого предельного значения, то на шаге 161 считываются дата и время, а на шаге 162 регистрируется соответствующий аварийный сигнал перехода ниже самого низкого значения.
На основе вычисленного расхода F могут быть вычислены другие аварийные сигналы завышения предельных значений. Например, пользователь может ввести предельные значения для мгновенного и накопленного значений потока. Когда вычисленное значение расхода F превышает какое-либо из этих предельных значений, запускается аварийный сигнал. Дополнительный аварийный сигнал может быть основан на перемещении стержня. Пользователь может ввести предельное значение для накопленного расстояния перемещения стержня и запустить предупредительный аварийный сигнал, когда перемещение стержня превышает предельное значение.
После проверки введенных пользователем предельных аварийных значений может быть запущена одна или более подпрограмм, для определения того, существуют какие-либо логические аварийные условия. В предпочтительном варианте воплощения каждая из логических подпрограмм комбинируется в одну интегральную логическую подпрограмму (фиг.6). Подпрограмма начинается на шаге 165 со сбора всех данных давления и вычисления величины потока через регулятор давления. Затем каждый из измеренных параметров сравнивается как с другими измеренными параметрами, так и с любыми заданными пользователем установочными значениями. Логические аварийные сигналы отслеживаются для давления против течения (шаг 166), давления по течению (шаг 167), вспомогательных давлений (шаг 168), перемещения стержня (шаг 169) и расхода (шаг 170). Дополнительные логические аварийные сигналы используются для обратной связи из третьей сборки датчика давления и вспомогательного устройства, подключенного к соединению 112 ввода-вывода. Затем, после получения относительных значений каждого из параметров, проверяются логические аварийные сигналы, как описано более подробно ниже.
Предпочтительная последовательность операций для определения логических аварийных сигналов на основе измерения давления против течения (шаг 166) схематически показана на фиг.7A. Сначала на шаге 172 подпрограмма проверяет введенные значения, относящиеся к давлению против течения. Если вводится значение, относящееся к давлению против течения, то подпрограмма определяет, должно ли измеренное значение быть больше (шаг 173), меньше (шаг 174) или равно (шаг 175) введенному пользователем значению. Для каждого относительного сравнения (то есть, шаги 173, 174 и 175), выполняется ряд под-шагов, как показано на фиг.7Б-7Г.
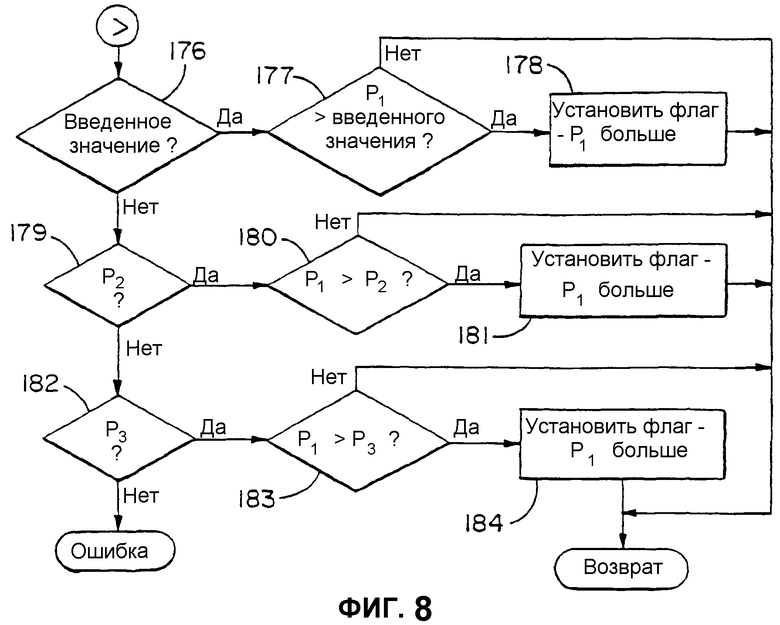
Если аварийный сигнал требует, чтобы давление против течения было больше некоторого значения, то подпрограмма на шаге 176 сначала проверяет специфическое значение давления против течения, введенное пользователем (фиг.7Б). Если пользователь ввел значение для давления против течения, то на шаге 177 измеренное давление против течения сравнивается в введенным значением. Если измеренное значение больше, чем введенное значение, то на шаге 178 устанавливается флаг - давление против течения больше. Если не используется какое-либо специфическое введенное пользователем значение, то на шаге 179 подпрограмма проверяет, нужно ли сравнивать давление по течению с давлением против течения. Если да, то на шаге 180 подпрограмма определяет, является ли давление против течения большим, чем давление по течению. Если да, то на шаге 181 устанавливается флаг - давление против течения больше, чем давление по течению. Если давление по течению не используется как логический аварийный сигнал, то дальше на шаге 182 подпрограмма проверяет значение логического аварийного сигнала на основе вспомогательного давления. Если вспомогательное давление используется как логический аварийный сигнал, то на шаге 183 подпрограмма проверяет, является ли давление против течения большим, чем давление по течению. Если да, то на шаге 184 устанавливается флаг - давление против течения больше, чем вспомогательное давление.
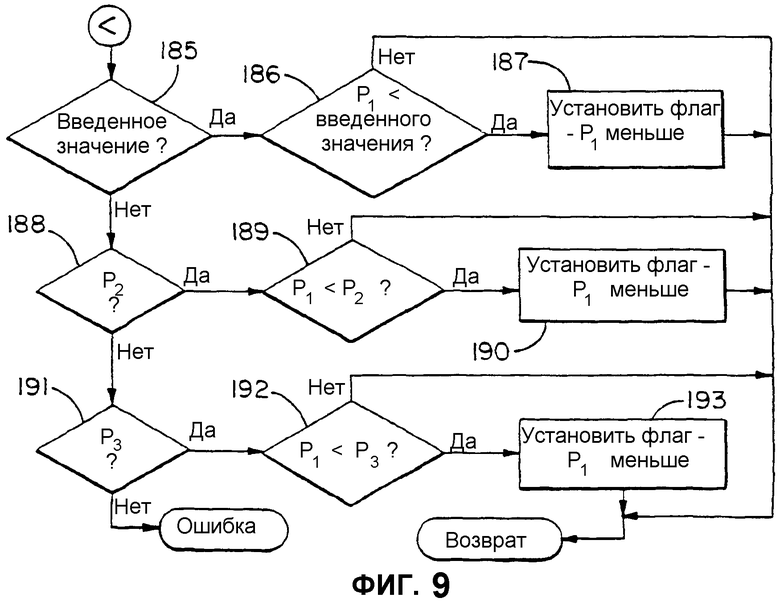
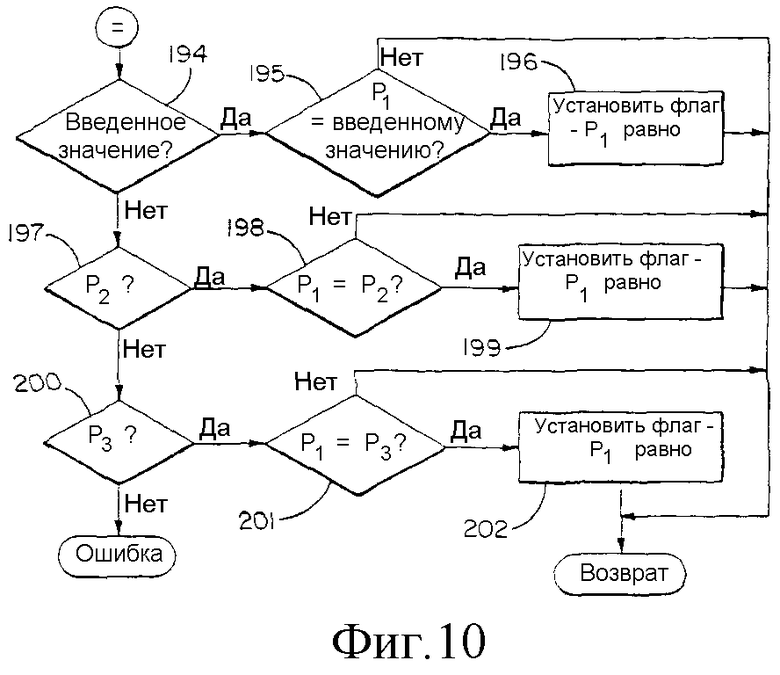
Как показано на фиг.7В и 7Г, подпрограмма выполняет подобные шаги, чтобы определить, является ли давление против течения меньшим или равным логическому значению аварийного сигнала (шаги 185-202). Для определения того, являются ли значения давления по течению и вспомогательного давления больше, меньше или равными заданным значениям логического аварийного сигнала, выполняются операции, идентичные показанным на фиг.7Б-7Г. Поскольку указанные операции идентичны, отдельные блок-схемы, иллюстрирующие указанные шаги, не приводятся.
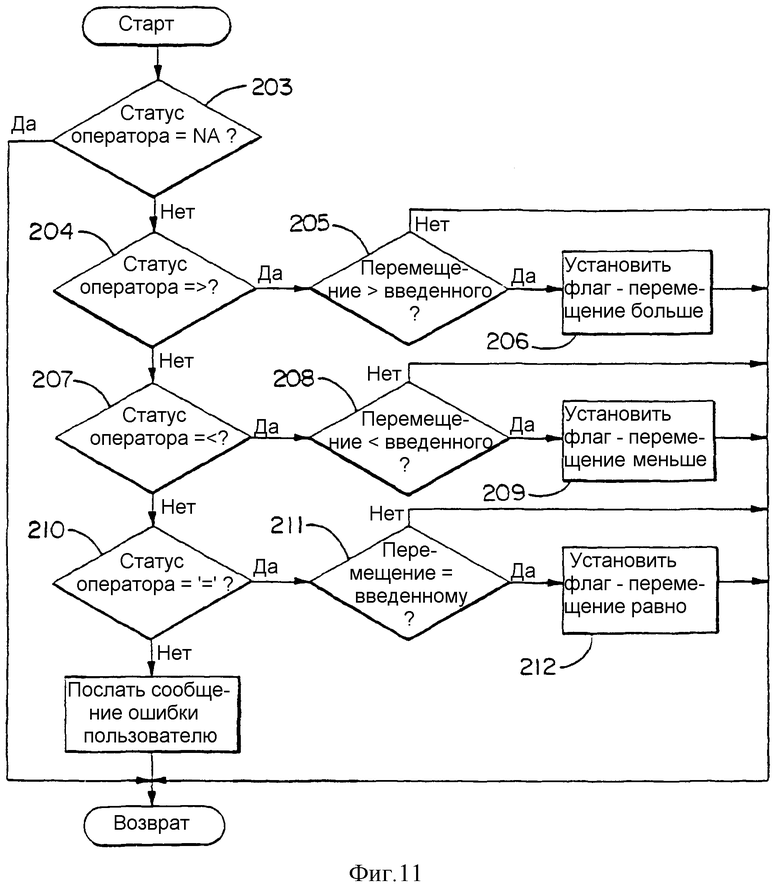
Возвратимся к логическим аварийным сигналам, основанным на перемещении (шаг 169, фиг.7А), блок-схема логической последовательности иллюстрируется на фиг.7Д. Соответственно, на шаге 203 подпрограмма проверяет, было ли введено логическое значение положения перемещения. Если логическое значение положения перемещения было введено, то подпрограмма определяет (шаг 204), должно ли измеренное значение быть больше, чем логическое значение. Если логический оператор больше, чем предельное значение, то подпрограмма определяет (шаг 205), является ли измеренное значение положения перемещения большим, чем введенное значение. Если да, то на шаге 206 устанавливается флаг - перемещение больше. Если для перемещения используется предельное значение, отличное от значения "больше", то на шаге 207 подпрограмма проверяет предельное значение "меньше". Если детектируется предельное значение "меньше", то на шаге 208 подпрограмма определяет, является ли измеренное перемещение меньшим, чем введенное значение. Если да, то на шаге 209 устанавливается флаг - перемещение меньше. Если значение "меньше" не используется, то на шаге 210 подпрограмма проверяет предельное значение оператора "равно". Если используется предельное значение "равно", то на шаге 210 подпрограмма определяет, является ли измеренное перемещение равным введенному значению. Если да, то на шаге 212 устанавливается флаг - перемещение равно. Подобная последовательность шагов может быть использована для определения того, является ли вычисленный расход больше, меньше или равным логическому значению аварийного сигнала потока, как требуется на шаге 170 (фиг.6).
На основе логических флагов, которые могут быть установлены, некоторые логические аварийные сигналы могут запускаться на основе сравнения двух из измеренных параметров. Например, аварийный сигнал проблемы отключения может быть установлен так, чтобы он запускался, когда положение перемещения равно нулю, а давление по течению увеличивается (настоящее давление по течению больше, чем только что предшествующее измеренное давление по течению). Когда существуют рабочие условия, подходящие для установки соответствующих логических флагов, запускается аварийный сигнал отключения, который может указывать на то, что текучая среда протекает через регулятор давления, возможно из-за повреждения дросселирующего элемента. Другой логический аварийный сигнал может генерироваться тогда, когда значение перемещения больше нуля и сигнал давления по течению уменьшается, что может указывать на сломанный стержень. Еще один логический аварийный сигнал может генерироваться в том случае, когда значение перемещения больше нуля и сигнал давления против течения увеличивается, что также может указывать на сломанный стержень или другую проблему с регулятором. Еще один логический аварийный сигнал может запускаться, когда сигнал перемещения больше нуля и сигнал давления по течению больше, чем введенное пользователем предельное значение давления по течению, что может указывать на проблему с управляющим механизмом, который управляет регулятором. Могут быть введены другие логические аварийные сигналы, которые учитывают различные измеренные и вычисленные значения, так, что будут мгновенно выявляться другие потенциальные проблемы с регулятором.
Память, связанная с процессором, предпочтительно включает запись аварийных сигналов, отслеживаются дата, время и тип аварийного сигнала. Запись аварийных сигналов доступна для внешнего устройства связи, позволяя восстанавливать динамику аварийных сигналов. Кроме того, процессор предпочтительно включает сообщение схемы исключения (RBX), которая автоматически сообщает какие-либо ситуации аварийной сигнализации в удаленный главный компьютер. Соответственно, осуществляется быстрое сообщение о потенциальных проблемах в трубопроводе и идентифицируется конкретный компонент или поврежденный участок.
Выше проиллюстрировано и описано объединенное устройство измерения и диагностики потока через регулятор, но согласно настоящему изобретению может быть обеспечено отдельное устройство измерения потока через регулятор или отдельное устройство диагностики регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2005 |
|
RU2372184C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ПОЛОЖЕНИЯ ДРОССЕЛИРУЮЩЕГО ЭЛЕМЕНТА РЕГУЛЯТОРА ДАВЛЕНИЯ | 2003 |
|
RU2344462C2 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТЕРЖНЯМИ В ЯДЕРНОМ РЕАКТОРЕ | 2010 |
|
RU2578172C2 |
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ ВАЛА | 2013 |
|
RU2529275C1 |
| Сейсмоприемник | 1987 |
|
SU1509771A1 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА | 2023 |
|
RU2816442C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И ВЫПОЛНЕННАЯ С ПОДОБНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ КЛАПАННАЯ СИСТЕМА | 2009 |
|
RU2548137C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| Аппарат для магнитной обработки жидкости | 1985 |
|
SU1296513A1 |
Изобретение относится к устройству измерения линейного перемещения и может быть использовано для регулирования потока среды. Сущность: регулятор давления содержит главный корпус со впускным и выпускным отверстиями, дросселирующий элемент, датчик положения дросселирующего элемента, датчик магнитного потока. Магнитная сборка для датчика магнитного потока состоит из магнитного корпуса, магнита, центрирующего кольца, расположенного между магнитом и магнитным корпусом. Центрирующее кольцо содержит смещенную стенку для центрирования магнита в магнитном корпусе. Технический результат: повышение надежности работы устройства. 2 н. и 26 з.п.ф-лы, 15 ил.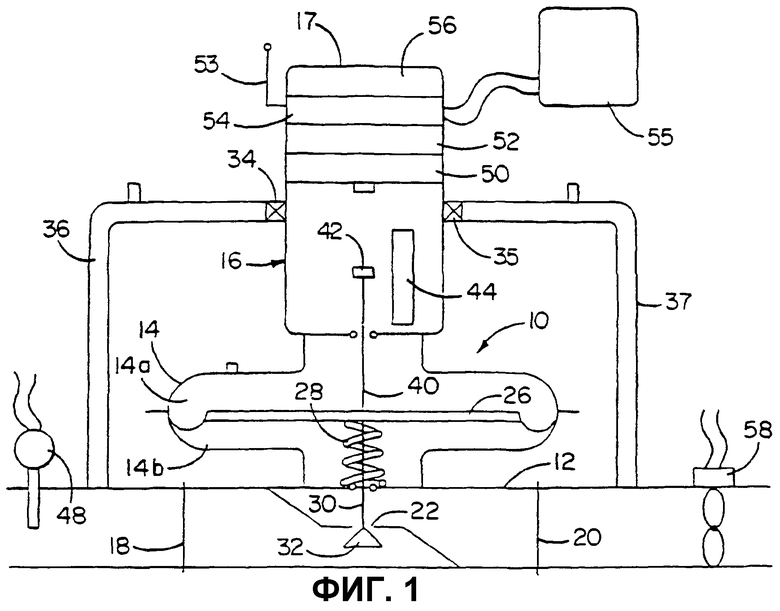
главный корпус, имеющий впускное и выпускное отверстия, причем поток текучей среды проходит между впускным и выпускным отверстиями;
дросселирующий элемент, способный перемещаться по пути потока текучей среды;
датчик положения дросселирующего элемента, содержащий
магнитный корпус, поддерживаемый в фиксированном положении по отношению к главному корпусу и задающий внутреннюю поверхность,
магнит, размеры которого подобраны для размещения в магнитном корпусе и адаптированный для движения с дросселирующим элементом, причем магнит имеет северный полюс и южный полюс, между которыми генерируется магнитный поток,
центрирующее кольцо, расположенное между магнитом и магнитным корпусом, причем центрирующее кольцо содержит смещенную стенку для центрирования магнита в магнитном корпусе;
датчик магнитного поля для детектирования магнитного потока.
магнитный корпус, имеющий внутреннюю поверхность,
магнит, размеры которого подобраны для размещения в магнитном корпусе и адаптированный для движения с подвижной деталью, причем магнит имеет северный полюс и южный полюс, между которыми формируется магнитный поток,
центрирующее кольцо, расположенное между магнитом и магнитным корпусом, причем центрирующее кольцо содержит смещенную стенку для центрирования магнита в магнитном корпусе.
| Стекло для получения покрытий на керамических подложках | 1975 |
|
SU550350A1 |
| US 5219041 A, 15.06.1993 | |||
| Регулятор давления газа | 1975 |
|
SU618727A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 0 |
|
SU346713A1 |
| US 4351047 A, 21.09.1982. | |||

