Область техники
Ссылки на заявки, относящиеся к настоящему изобретению. В данной заявке испрашивается приоритет по патентной заявке США 09/664049, поданной 18 сентября 2000, и патентной заявке Швеции 0003322-5, поданной 18 сентября 2000, ссылки на которые приводятся в описании.
Настоящее изобретение относится к способу и устройству управления работой блока привода, в частности, блока привода транспортера, более конкретно, блока привода транспортера для загрузки и выгрузки грузового отсека, в частности, грузового отсека фюзеляжа воздушного судна.
Уровень техники
Такой погрузочный транспортер или система со скользящей дорожкой описана в патенте США 4984756 (Хельмнер), включенном в настоящее описание в качестве ссылки.
Погрузочная система расположена под пассажирским салоном и содержит транспортер в виде дорожки, приводимый в движение блоком привода через ремни, соединенные с транспортером. Задняя грузовая стенка закреплена на ремнях и ограничивает заднее пространство для размещения багажа.
Погрузочная система функционирует следующим образом. Сначала включают блок привода, который перемещает заднюю стенку по направлению к передней части системы, и укладывают на транспортер, выполненный в виде дорожки, один ряд чемоданов или подобного груза. Затем включают блок привода, который перемещает транспортер и заднюю стенку приблизительно на полметра назад. На транспортер укладывают новый ряд багажа и снова запускают блок привода. Укладка багажа продолжается до полной загрузки транспортера, то есть до того момента, пока задняя стенка не займет крайнее заднее положение.
Когда погрузочный транспортер должен быть разгружен, процедуру осуществляют в обратном порядке. Погрузочный транспортер поэтапно разгружают и перемещают посредством блока привода до его полного освобождения, то есть до того момента, пока задняя стенка не займет крайнее переднее положение.
Блок привода (двигатель и коробка передач) системы со скользящей дорожкой обычно содержит трехфазный асинхронный двигатель, связанный с редуктором, например, планетарной зубчатой передачей. Скорость вращения и крутящий момент блока привода выбираются из условия обеспечения работы с наибольшей предусмотренной массой багажа (максимальной нагрузкой) погрузочной системы. Кроме того, электрическую систему рассчитывают на основе максимального тока, потребляемого блоком привода (асинхронным двигателем) при такой максимальной нагрузке.
Двигатель защищен плавкими предохранителями или размыкателями цепи, которые срабатывают при перегрузке по току, то есть когда двигатель развивает вращающий момент, превышающий максимальную нагрузку. Предохранители, которые защищают двигатель, электрические кабели и другие электрические компоненты рассчитываются на основе указанной максимальной нагрузки транспортера. Для защиты механических компонентов подвижная перегородка оснащена соединениями, расцепляемыми при столкновении перегородки с препятствием. После срабатывания такие расцепляемые соединения возвращают в рабочее положение вручную, что представляет собой проблему. Это занимает время, при этом скользящую дорожку необходимо вручную разгрузить, вызвать механика, и наличие такой функции обосновано только в некоторых случаях погрузки.
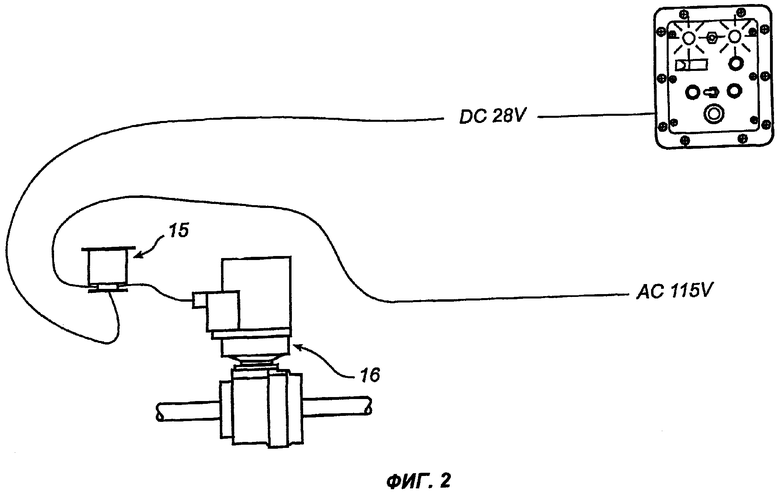
Схема соединений компонентов известного из уровня техники транспортера показана на фиг.2. Оператор управляет транспортером через панель управления, которая передает исполнительный сигнал на реле (15), определяющее в свою очередь, нужно ли подавать электрический ток на блок привода (16). Если в процессе работы застревают какие-либо предметы, то срабатывают расцепляемые соединения или электрические предохранители.
Тем не менее, максимальная нагрузка достигается крайне редко в силу указанных ниже причин:
1) Двигатель рассчитан на использование в погрузочных системах различных моделей, имеющих разную длину, то есть допускающих различную массу багажа. Следовательно, двигатель, устанавливаемый в системе со скользящей дорожкой, во многих случаях рассчитывают с запасом в отношении максимальной нагрузки этой системы.
2) Во многих случаях максимально допустимый вес багажа не достигается даже при полной загрузке грузового отсека воздушного судна.
3) Поскольку загрузку и выгрузку выполняют поэтапно, но только на первом этапе нагрузка на блок привода будет полной. Соответственно, на последнем этапе нагрузка на блок привода уменьшается до нуля.
Это означает, что блок привода в большинстве случаев развивает существенно более высокое тяговое усилие, то есть вращающий момент, чем это необходимо. Тем не менее, этот блок, конечно, должен выдерживать максимальную нагрузку на этапе, когда система со скользящей дорожкой максимально нагружена багажом.
Проблема заключается в том, что если погрузочная система сталкивается с каким-либо препятствием, например, если не полностью снята грузовая сетка, или застревает багаж, плавкие предохранители и расцепляемые соединения перегородки обычно срабатывают недостаточно быстро, поскольку они во многих случаях рассчитаны в соответствии с требованиями по максимальной нагрузке. Следовательно, в тех случаях, когда нагрузка на транспортер ниже максимальной, существует опасность повреждения застрявшего багажа погрузочным транспортером с системой со скользящей дорожкой, или поломки транспортера. Более того, в каждом случае повреждения багажа или поломки транспортера требуется длительный ремонт, ручная погрузка или разгрузка.
Другая проблема, присущая известным погрузочным транспортерам вышеуказанного типа, состоит в ошибках оператора при управлении транспортером. Например, не редкость, когда оператор, управляя транспортером в режиме выгрузки, позволяет транспортеру и задней стенке выталкивать сумки из багажного отделения вместо поэтапного маневрирования транспортером и снятия сумок. Поскольку электрическая схема рассчитана на основе максимальной нагрузки, то обычно проходит какое-то время до момента остановки транспортера, даже если какие-либо предметы застревают при неправильном управлении транспортером. В этом случае задняя стенка обычно высвобождается, и весь отсек нужно разгружать вручную, а затем расцепляемые соединения задней стенки необходимо вернуть в рабочее состояние. Такая ручная разгрузка и повторная установка расцепляемых соединений занимает достаточно много времени.
В сфере воздушных перевозок время нахождения на земле должно быть максимально сокращено, чтобы окупить очень большие инвестиции, идущие на приобретение самолетов и постройку аэропортов.
В сфере воздушных перевозок время нахождения на земле почти всегда определяют как время, необходимое на заправку, проверку безопасности и прочие подобные критические факторы. Недопустимо, чтобы загрузка багажа занимала больше времени, чем меры, предпринимаемые на земле для обеспечения полета.
Таким образом, ручная разгрузка транспорта, вызванная застрявшими предметами или неправильным управлением, недопустима.
Сущность изобретения
Основной задачей настоящего изобретения является обеспечение усовершенствованного способа и устройства управления работой блока привода, в которых устранены или по меньшей мере снижены указанные проблемы, присущие известным решениям.
Еще одной задачей настоящего изобретения является обеспечение усовершенствованного способа и устройства управления работой блока привода для транспортера.
Другой задачей изобретения является обеспечение усовершенствованного способа и устройства управления работой блока привода для транспортера, предназначенного для загрузки и выгрузки грузового отсека, в частности грузового отсека фюзеляжа воздушного судна.
Одной из конкретных задач настоящего изобретения является устранение или по меньшей мере сокращение риска повреждения рабочей зоны погрузочного транспортера, груза, оператора или самого транспортера, вызванного застрявшими предметами.
Еще одной задачей настоящего изобретения является предотвращение ситуации, когда оператор может нанести ущерб погрузочному транспортеру или рабочей зоне транспортера из-за неправильного управления системой со скользящей дорожкой.
Другой задачей является снижение времени, требуемого для возвращения транспортера в рабочее состояние после его временной остановки, вызванной застрявшими предметами или неправильным использованием.
Эти и другие задачи, которые очевидны из последующего описания, решаются способом управления работой блока привода, содержащим операции, указанные в пункте 1.
За счет первоначального сравнения показания тока с максимальным уровнем, определения устойчивого состояния и окончательного установления одного или более пределов обнаружения перегрузки на основе показания тока устойчивого состояния, обеспечивается управление работой блока привода в режиме изменяющейся нагрузки, а также достаточно быстрое отключение питания в случае застревания предметов. Даже если блок привода перемещает транспортер с нагрузкой, намного меньшей максимальной нагрузки транспортера, в случае застревания предметов питание зачастую отключается задолго до момента срабатывания обычных плавких предохранителей или размыкателей цепи.
Согласно предпочтительному варианту способ дополнительно содержит операцию д) выполнения третьего сравнения, при котором показания тока многократно сравнивают с мягким максимальным уровнем, устанавливаемым на основе упомянутого показания устойчивого состояния тока. В случае, если количество показаний, превышающих упомянутый мягкий максимальный уровень, превосходит значение остановки мягкого максимального уровня, осуществляется отключение электропитания блока привода.
За счет установки мягкого максимального уровня в предлагаемом способе реализуется отключение питания в случае медленного нарастания тока в течение длительного периода времени. Это может иметь место при застревании каких-либо предметов, когда проблема нарастает, но фактическая остановка погрузочной системы еще не произошла.
Согласно предпочтительному варианту, способ дополнительно содержит операцию е) выполнения четвертого сравнения, при котором многократно сравнивают между собой последовательные показания, и в случае, если разница между показаниями неоднократно превышает второй уровень линейного нарастания, отключают электропитание блока привода.
За счет подобного сравнения показаний между собой в предлагаемом способе реализуется отключение питание, даже если максимальный уровень не был достигнут. Это означает, что в случае плотного застревания предметов блок привода практически немедленно останавливается.
Согласно еще одному предпочтительному варианту способа, операция первого сравнения включает стадии сравнения показаний тока с первым заранее заданным максимальным уровнем и отключения электропитания блока привода в случае, если количество последовательных показаний, превышающих упомянутый максимальный уровень, превосходит заранее заданное значение остановки максимального уровня.
В этом варианте способ более совершенен, то есть питание отключается с большей точностью именно в тех ситуациях, когда оно должно быть отключено, и не отключается в случае отсутствия в этом необходимости.
Согласно еще одному предпочтительному варианту способа, операция второго сравнения содержит стадии многократного сравнения между собой двух последовательных показаний тока и определения условия устойчивого состояния для тока, подаваемого на блок привода, в случае, если количество последовательных сравнений, при которых разница показаний меньше первого заранее заданного уровня линейного нарастания, превышает заранее заданный уровень обнаружения устойчивого состояния.
В этом варианте способ также более совершенен, то есть питание отключается с большей точностью именно в тех ситуациях, когда оно должно быть отключено, и не отключается в случае отсутствия в этом необходимости.
Согласно еще одному предпочтительному варианту способа, операция четвертого сравнения содержит стадии многократного сравнения между собой последовательных показаний тока и отключения электропитания блока привода в случае, если количество сравнений, при которых разница показаний превышает второй заранее заданный уровень линейного нарастания, превосходит заранее заданный уровень обнаружения линейного нарастания.
В этом варианте способ еще более совершенен, то есть питание отключается с большей точностью именно в тех ситуациях, когда оно должно быть отключено, и не отключается в случае отсутствия в этом необходимости.
Согласно еще одному предпочтительному варианту способа, мягкий максимальный уровень обновляют на основе показаний устойчивого состояния тока, подаваемого на блок привода.
В таком варианте способа учитывается некоторое ожидаемое повышение или понижение тока в течение периода времени, когда запускают блок привода. За счет обновления мягкий максимальный уровень можно установить ближе к фактическому показанию устойчивого состояния тока, при этом улучшается надежность способа.
Согласно еще одному предпочтительному варианту способа, показания тока, подаваемого на блок привода, снимают бесконтактным образом.
Бесконтактный способ снятия показаний тока облегчает установку устройства, реализующего предлагаемый способ, в действующую установку.
Согласно еще одному предпочтительному варианту способа, снятие показаний тока осуществляют при помощи измерительного устройства, реагирующего на электромагнитное поле вокруг электрического проводника, через который подают электропитание на блок привода.
Такой способ бесконтактного определения тока, подаваемого на блок привода, отличается простотой и надежностью.
Указанные задачи изобретения решаются также за счет устройства управления работой блока привода, охарактеризованного признаками пункта 10.
Принцип устройства такого типа заключается в том, что параметры работы блока привода определяются при помощи измерительного устройства и учитываются устройством обработки данных, а затем управляются выключателем. При определении параметров граничные значения можно установить на основе различных нагрузок на блок привода и различной реакции этого блока, а также внешних факторов, воздействующих тем или иным образом на блок привода. Такой адаптивный способ установки пределов обеспечивает возможность отключения питания блока привода во внештатной ситуации, даже если не достигнута максимальная нагрузка блока. Это устройство управляет работой блока привода даже при нагрузках, далеких от максимальной нагрузки. Пределы, установленные адаптивно, могут быть намного ближе к фактической нагрузке, чем пределы, установленные на основе максимальной нагрузки. Это означает, что блок привода останавливается во внештатной ситуации независимо от того, достигнута максимальная нагрузка или нет.
Согласно предпочтительному варианту осуществления устройства, электрический выключатель, принимающий сигнал, управляет реле, которое управляет блоком привода.
При включении питания в две стадии риск сгорания или повреждения устройства очень невелик. Сигнал, поступающий от устройства обработки данных, управляет выключателем, который передает сигнал среднего напряжения на реле, регулирующее в свою очередь мощность электропривода, которая зачастую слишком велика для первого электрического выключателя. Выбор комбинаций выключателей и реле во многом зависит от внешних предполагаемых факторов.
Согласно предпочтительному варианту устройства, измерительное устройство является бесконтактным счетчиком, предпочтительно индуктивным счетчиком, определяющим параметры электромагнитного поля вокруг по меньшей мере одного из проводников, подающих электропитание на блок привода.
Согласно следующему предпочтительному варианту устройства, измерительное устройство, устройство обработки данных и упомянутый выключатель, принимающий сигнал, объединены в одном блоке.
Объединением указанных компонентов в одном блоке существенно облегчается монтаж и производственный процесс.
Задачи изобретения также решаются за счет транспортера, охарактеризованного в пункте 24.
Использование устройства описанного типа в транспортере намного повышает безопасность оператора, груза и самого транспортера. При использовании такого устройства параметры работы блока привода, следовательно, транспортера определяются измерительным устройством и учитываются устройством обработки данных, а затем регулируются выключателем. При определении параметров граничные значения работы блока привода можно установить на основе различных нагрузок на привод и различной реакции этого блока, а также внешних факторов, воздействующих тем или иным образом на блок привода. Такой адаптивный способ установки пределов обеспечивает возможность отключения питания блока привода во внештатной ситуации, даже если не достигнута максимальная нагрузка блока. Это устройство управляет работой блока привода даже при нагрузках, далеких от максимальной нагрузки. Пределы, установленные адаптивно, могут быть намного ближе к фактической нагрузке, чем пределы, установленные на основе максимальной нагрузки. Это означает, что блок привода останавливается во внештатной ситуации независимо от того, достигнута максимальная нагрузка или нет.
Следует учесть, что признаки предпочтительных вариантов способа и устройства согласно изобретению могут быть скомбинированы любым образом.
Краткий перечень фигур
В дальнейшем изобретение описывается более подробно со ссылкой на прилагаемые фигуры, которые демонстрируют предпочтительный вариант осуществления изобретения.
На фиг.1 показаны основная часть и задняя стенка погрузочного транспортера, а также устройство согласно изобретению, предназначенное для управления работой блока привода транспортера и размещаемое в предпочтительном варианте в этом транспортере.
На фиг.2 показана схема соединений известного решения, предназначенная для управления работой блока привода погрузочного транспортера.
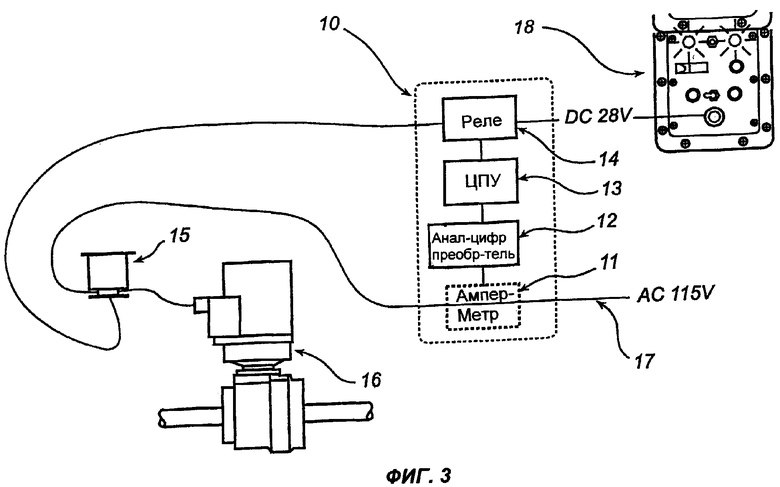
На фиг.3 показана схема соединений компонентов, предназначенных для управления работой блока привода погрузочного транспортера, согласно предпочтительному варианту осуществления изобретения.
На фиг 4а и 4б схематически показана блок-схема предпочтительного варианта осуществления способа согласно изобретению.
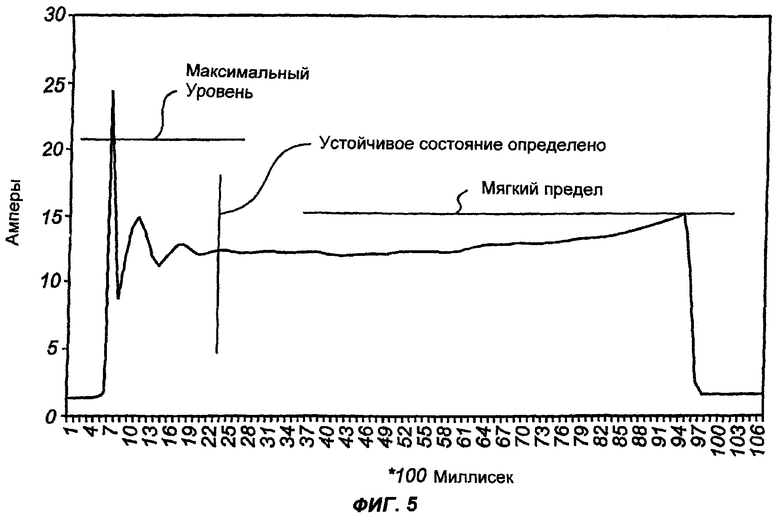
На фиг.5 показана временная зависимость тока, подаваемого на электрический двигатель блока привода на протяжении одного цикла.
Сведения, подтверждающие возможность осуществления изобретения
В предпочтительном варианте изобретение относится к устройству 10 управления работой погрузочной системы 1, предназначенной для загрузки и выгрузки грузового отсека, в частности отсека фюзеляжа воздушного судна. Пример такой погрузочной системы или системы со скользящей дорожкой описан в патенте США 4984756 (Хельмнер), который включен в описание в качестве ссылки.
На фиг.1 показано, что погрузочная система 1 расположена под пассажирской кабиной и содержит транспортер 2 в виде дорожки, приводимый блоком привода 16 (не показан, но расположен под рамой погрузочной системы вблизи крайнего заднего конца рамы) при помощи ремней 3, соединенных с транспортером 2. Задняя грузовая стенка 4 закреплена на ремнях 3 и ограничивает заднее пространство для укладки багажа.
Система в режиме загрузки работает следующим образом. Сначала запускают блок привода 16, который перемещает заднюю стенку 4 и транспортер 2 в переднюю часть системы. На транспортер 2 укладывают один ряд чемоданов или подобного багажа. Затем запускают блок привода 16, который сдвигает транспортер 2 и заднюю стенку 4 приблизительно на полметра назад.
На транспортер 2 укладывают новый ряд багажа, запускают блок привода 16, повторяя процедуру последовательно до тех пор, пока транспортер 2 не будет полностью загружен, то есть пока задняя стенка 4 не займет крайнее заднее положение.
При разгрузке транспортера описанную процедуру осуществляют в обратном порядке. Транспортер 2 постепенно разгружают, перемещая при помощи блока привода 16 до тех пор, пока он не будет полностью освобожден, то есть пока задняя стенка 4 не займет крайнее переднее положение.
Блок привода 16 (двигатель и коробка передач) системы со скользящей дорожкой обычно состоит из трехфазного асинхронного электрического двигателя, связанного с редуктором, например, планетарной зубчатой передачей. Скорость вращения и крутящий момент блока привода выбирают из условия обеспечения работы с наибольшим расчетным весом багажа (максимальной нагрузкой) погрузочной системы. Кроме того, электрическую систему рассчитывают на основе максимального тока, потребляемого блоком привода (асинхронным двигателем) при такой максимальной нагрузке.
Двигатель защищен плавкими предохранителями или размыкателями цепи, которые плавятся или срабатывают при перегрузке по току, когда вращающий момент двигателя превышает максимальную нагрузку. Предохранители, которые защищают двигатель, электрические кабели и другие электрические компоненты рассчитываются на основе указанной максимальной нагрузки системы. Для защиты механических компонентов подвижная перегородка имеет соединения, расцепляемые при столкновении перегородки с препятствием.
Блок привода (двигатель и коробка передач) в предпочтительном варианте системы со скользящей дорожкой содержит трехфазный асинхронный двигатель, связанный с редуктором, имеющим передаточное число 287 к 1. При максимальном числе оборотов крутящий момент блока находится в интервале от 600 до 850 Нм в зависимости от модели.
Как видно на фиг 3, устройство 10 управления работой блока привода 16 погрузочной системы 1 содержит амперметр 11, снимающий показания тока, подаваемого на блок привода 16. Амперметр 11 окружает один (или более) из трех электрически изолированных проводников 17 электропроводки, подводящей электроэнергию к блоку привода 16. Амперметр 11 не имеет электрического соединения с указанным проводником 17, и измеряет ток за счет определения параметров электромагнитного поля вокруг проводника 17 при помощи катушки индуктивности. Аналоговый сигнал катушки амперметра 11 поступает на аналогово-цифровой преобразователь 12, который преобразует его в цифровой сигнал. Цифровой сигнал передают на ЦПУ (центральный процессор) 13, в котором этот сигнал, соответствующий току, подаваемому на блок привода 16, оценивают, как это будет описано ниже. На основе оценки, осуществляемой центральным процессором 13, сигнал направляют на выключатель или реле 14 низкого тока. Реле 14 низкого тока, принимающее сигнал, включено между панелью 18 управления оператора и токовым реле 15 запуска, установленным между источником питания (не показан) и блоком привода 16. Амперметр 11, аналогово-цифровой преобразователь 12, центральный процессор 13 и реле 14 низкого тока объединены на монтажной плате в так называемое устройство 10 регулировки тока.
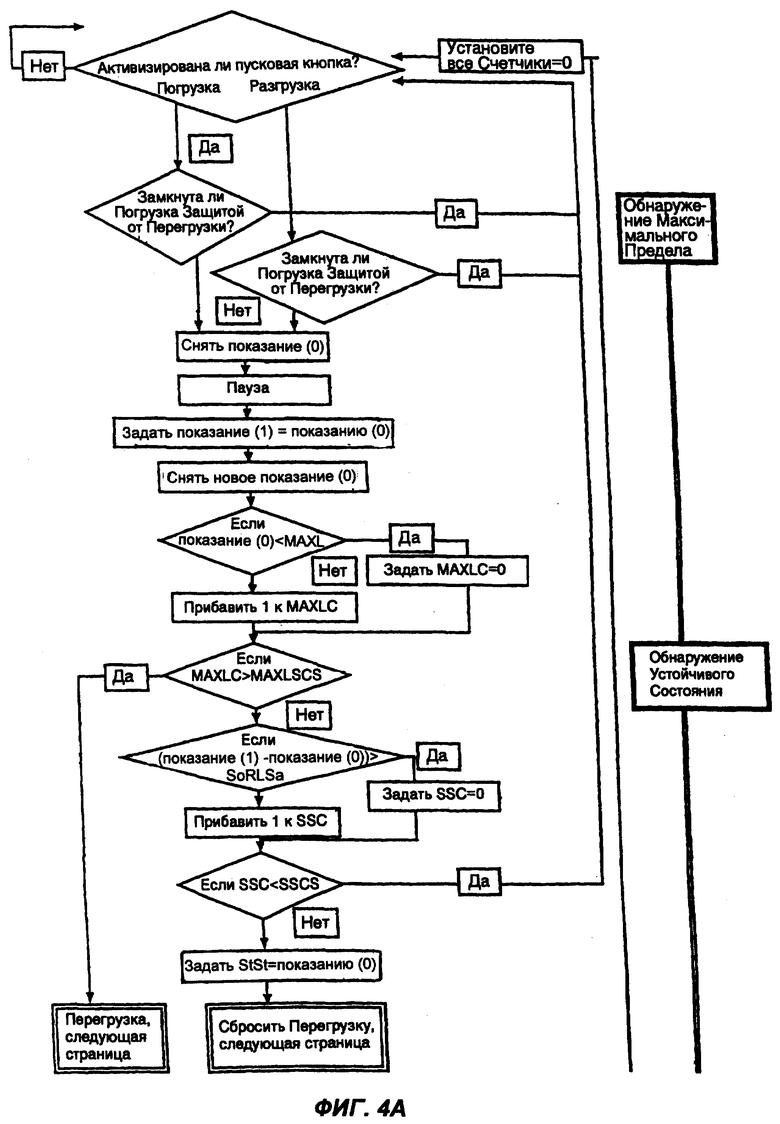
Способ оценки сигнала, используемый в центральном процессоре 13, будет описан подробнее со ссылкой на фиг.4а и 4б, на которых приведена схематическая блок-схема.
Когда оператор запускает погрузочную систему 1, сначала производится проверка в каком из направлений, то есть в направлении загрузки или разгрузки, должна работать система. Если необходима загрузка, центральный процессор проверяет заблокировано ли направление загрузки предохранительным устройством от перегрузки или нет. Если необходима разгрузка, центральный процессор проверяет, заблокировано ли направление разгрузки предохранительным устройством от перегрузки или нет. Если требуемое направление заблокировано, погрузочная система может быть запущена только в обратном направлении.
Когда оператор запускает блок привода в незаблокированном направлении, показания тока, подаваемого на блок привода 16 через упомянутые один или более проводников, многократно снимают с некоторым промежутком времени (0,1 сек). Если последнее показание ниже первого уровня, обозначенного на блок-схеме как MAXL: Максимальное Предельное Значение), то счетчик максимального предела (MAXLC: Счетчик Максимального Предела) устанавливается на ноль. Если последнее показание выше упомянутого первого уровня, то показание упомянутого счетчика максимального предела увеличивается на единицу. Если показание счетчика максимального предела достигает значения, превышающего значение остановки счетчика максимального предела (MAXLCS: Остановка Счетчика Максимального Предела), то это означает обнаружение перегрузки, и срабатывает реле 14, принимающее сигнал, которое отключает питание через реле 15. В результате работа блока привода 16 прекращается.
Так как счетчик максимального предела устанавливается на ноль, когда показание ниже упомянутого первого уровня, то перегрузка будет обнаружена в случае, если количество последовательно снятых показаний, превышающих упомянутый первый уровень, превосходит упомянутое значение остановки счетчика максимального предела.
Если по показанию счетчика максимального предела перегрузка не обнаруживается, выполняют операцию сравнения двух снятых показаний тока. Если разница между этими показаниями превышает первый уровень линейного нарастания (SoRLSa: Предельный Скачок от Устойчивого Состояния до Линейного Нарастания), счетчик устойчивого состояния (SSC: Счетчик Устойчивого Состояния) устанавливается на ноль. Если разница между снятыми показаниями ниже упомянутого первого уровня линейного нарастания (SoRLSa), показание счетчика устойчивого состояния (SSC) увеличивается на единицу.
Описанную процедуру повторяют до тех пор, пока показание счетчика устойчивого состояния (SSC) ниже значения остановки счетчика устойчивого состояния (SSCS). Программа проверяет запущена ли система в незаблокированном направлении, а также показания в отношении упомянутого первого уровня.
Когда показание счетчика устойчивого состояния (SSC) достигает значения остановки счетчика устойчивого состояния (SSCS), считается, что устойчивое состояние определено, и программа переходит к новому модулю.
Так как счетчик устойчивого состояния (SSC) устанавливается на ноль, если разница между двумя сравниваемыми показаниями тока превышает упомянутый первый уровень линейного нарастания (SoRLSa), то устойчивое состояние определяется в том случае, когда количество последовательных сравнений, при которых разница между показаниями меньше упомянутого первого уровня линейного нарастания (SoRLSa), равно значению остановки счетчика устойчивого состояния (SSCS).
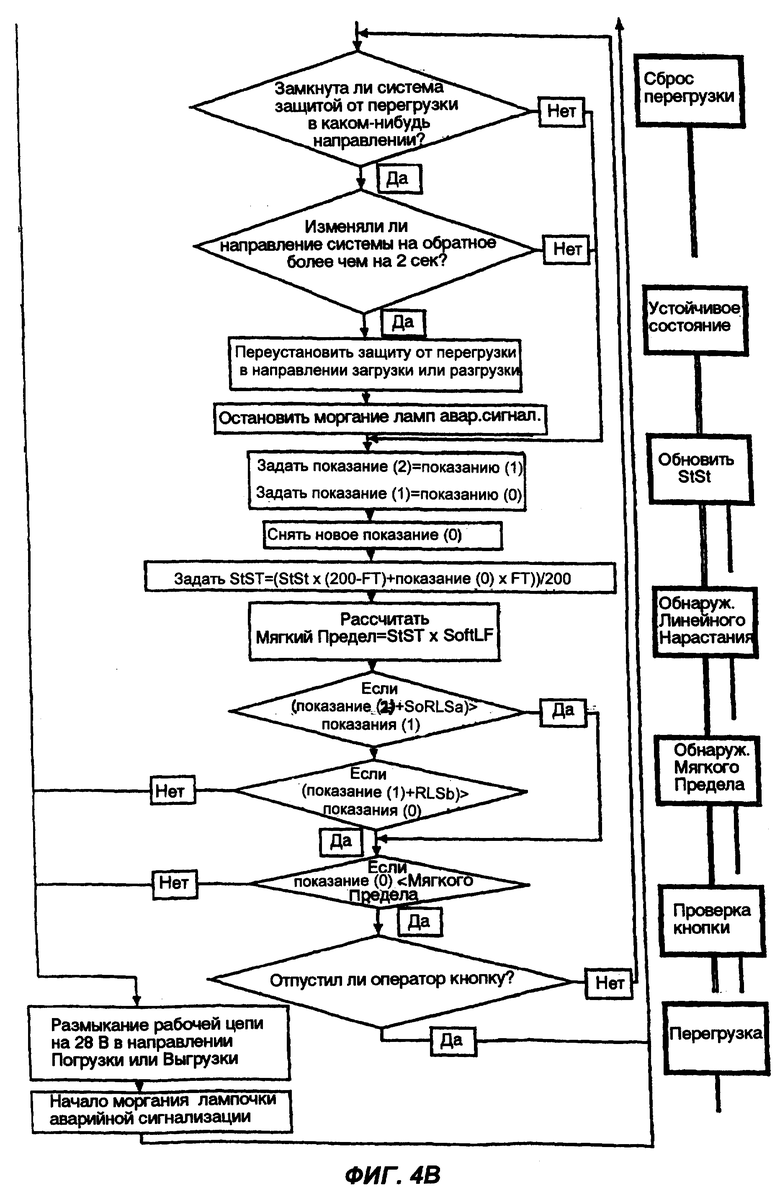
Если устойчивое состояние определено, задачей операции первой проверки является установление, заблокирована ли система в одном направлении предохранительным устройством от перегрузки. Если это так, то задачей операции следующей проверки является установление, осуществлялось ли перемещение погрузочной системы в противоположном направлении дольше двух секунд. Если в свою очередь это имело место, переустанавливают предохранительное устройство от перегрузки в рассматриваемом направлении, то есть в направлении, противоположном направлению, в котором работает транспортер, а аварийные лампы прекращают вспыхивать. Если система не заблокирована ни в одном из направлений, или если систему не перемещали в противоположном направлении более двух секунд, переустановку устройства не производят.
Следующая операция в модуле блок-схемы, относящемся к устойчивому состоянию, заключается в снятии нового показания тока, подаваемого на блок привода 16. Исходя из этого показания тока, определяют нормированное или обновленное значение устойчивого состояния (StSt), используя множитель (FT: Время Фильтра). При таком нормировании значение устойчивого состояния, используемое для установки упомянутых пределов перегрузки устойчивого состояния, обновляют в случае увеличения нагрузки блока привода. Обновление значения устойчивого состояния приводит к обновлению мягкого предела, то есть к повышению мягкого предела. Однако мягкий предел возрастает только на несколько процентов от увеличения значения устойчивого состояния. Это означает, что обновление мягкого предела не приведет к невозможности обнаружения перегрузки.
На основе этого рассчитанного значения устойчивого состояния рассчитывают мягкий предел (Мягкий Предел). Мягкий предел определяют умножением последнего снятого показания на заданный множитель мягкого предела (SoftLF: Множитель Мягкого Предела). В соответствии с альтернативным вариантом, мягкий предел определяют в виде суммы последнего снятого показания и заданного множителя мягкого предела.
Затем разницу между предпоследним и третьим с конца показаниями тока сравнивают с упомянутым первым уровнем линейного нарастания (SoRLSa). Если разница превышает первый уровень линейного нарастания (SoRLSa), то сравнивают последнее и предпоследнее показания. Если разница превышает второй уровень линейного нарастания (RLSb: Ступень b Предела Линейного Нарастания), это означает обнаружение перегрузки, и питание, подаваемое на блок привода, отключают с помощью реле 14, 15.
Если разница между упомянутыми предпоследним и третьим с конца показаниями меньше упомянутого первого уровня линейного нарастания (SoRLSa), сравнение со вторым уровнем линейного нарастания (RLSb) не выполняют.
Если в результате операций проверки уровня линейного нарастания перегрузка не обнаружена, последнее снятое показание сравнивают с упомянутым мягким пределом. Превышение или равенство этого показания мягкому пределу означает обнаружение перегрузки.
До тех пор, пока пусковая кнопка остается включенной оператором, повторяют операции модуля устойчивого состояния, то есть часть блок-схемы, показанную на фиг 4б. Если оператор освобождает пусковую кнопку, то программа обнуляет все счетчики, и возвращается к операции первой проверки, то есть к определению, нажата ли пусковая кнопка.
На практике операции способа реализуются в центральном процессоре с помощью компьютерной программы.
Конечно, постановка сравнений с использованием знаков неравенства, показанных на блок-схеме по фиг.4а и 4б, может быть изменена с учетом значений остановки счетчика устойчивого состояния при условии сохранения сущности. Формулировки сравнений в блок-схеме являются предпочтительными, но не единственными, обеспечивающими требуемый результат.
На фиг.5 представлена обычная временная зависимость тока, подаваемого на блок привода 16 через один из проводников 17 на некотором промежутке времени. На начальном этапе наблюдаются существенные колебания тока вследствие адаптации и инерции системы. На этом этапе ток сравнивают с упомянутым первым максимальным уровнем (MAXL), как описано выше.
Через некоторое время амплитуда колебаний уменьшается и определяется устойчивое состояние. После определения устойчивого состояния упомянутый мягкий предел (Мягкий Предел) рассчитывают на основе снятого показания тока.
Последний пик показывает возрастание тока в случае застревания какого-либо предмета. Так как к этому моменту устойчивое состояние определено, показания тока сравнивают с мягким пределом и друг с другом, как описано выше. Если одно из показаний превышает мягкий предел, или если повышение показаний слишком высокое, центральный процессор передает сигнал на реле 14 приема сигнала, которое в свою очередь управляет токовым реле 15, установленным между источником электропитания (не показан) и блоком привода 16.
Точные значения параметров, отображенных на блок-схеме, должны быть выбраны с учетом технических характеристик транспортера. Согласно предпочтительному варианту осуществления MaxLSC = 3; Множитель Мягкого Предела = 1,09; a SSSCS = 4, принимая во внимание временной промежуток между снятием показаний, равный 0,1 сек.
Как видно на фиг.5, ток, а значит и нагрузка на расцепляемые соединения, намного ниже в момент отключения питания, чем в момент запуска транспортера. Более того, ток на начальном этапе до определения устойчивого состояния может быть намного выше, чем показано на фиг.5, если транспортер нагружен большим количеством багажа или другого груза.
Понятно, что изобретение применимо в блоках привода и транспортерах других типов, отличных от описанного выше. В качестве примеров можно привести ленточные транспортеры других типов, такие как транспортеры для багажа или стоек регистрации, лифтов, эскалаторов, промышленных транспортеров и раздвижных дверей.
Кроме того, устройство 10 и реле 15, возможно, и блок привода 16 можно объединить в одну конструкцию с целью обеспечения однократной монтажной операции.
Следует отметить, что возможные модификации описанных предпочтительных вариантов осуществления изобретения не выходят за рамки объема охраны, определяемого формулой изобретения.
Изобретение относится к области электротехники и может быть использовано в устройствах управления блоком привода транспортера, например, транспортера для загрузки и выгрузки грузового отсека фюзеляжа воздушного судна. Техническим результатом является сокращение риска повреждения рабочей зоны погрузочного транспортера, груза, оператора или самого транспортера, вызванного застрявшими предметами, а также предотвращение ситуации, когда оператор может нанести ущерб погрузочному транспортеру из-за неправильного управления. В способе и устройстве управления работой блока привода многократно считывают показания тока, подаваемого на блок привода, сравнивают показания тока с первым максимальным уровнем и включают электронный источник питания блока привода в случае, если показания превышают максимальный уровень. Многократно сравнивают между собой два последовательных показания тока. Если количество сравнений, при которых разница показаний меньше первого уровня линейного нарастания, превышает значение счетчика устойчивого состояния, определяют условие устойчивого состояния для тока, подаваемого на блок привода. В случае определения устойчивого состояния, устанавливают по меньшей мере один предел обнаружения перегрузки на основе показания устойчивого состояния тока, подаваемого на блок привода. Устройство для осуществления данного способа содержит компоненты для выполнения указанных выше операций. 4 н. и 21 з.п. ф-лы, 6 ил.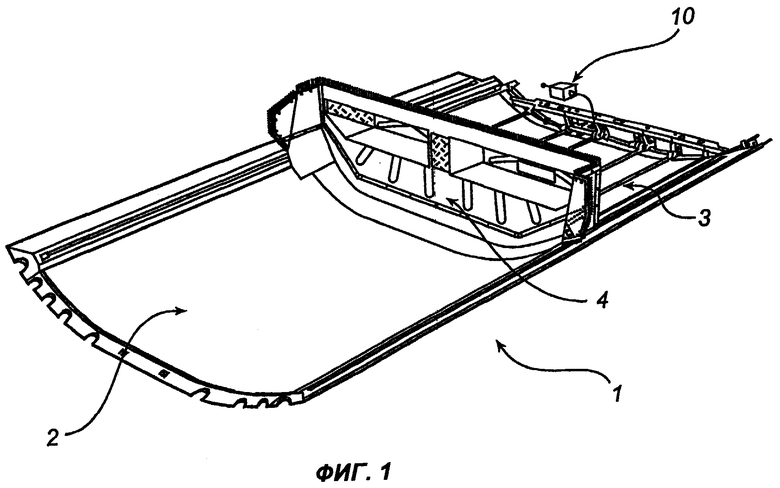
а) многократно снимают показания тока, подаваемого на блок привода (16);
б) выполняют первое сравнение, при котором показания тока сравнивают с первым максимальным уровнем, и в случае, если количество показаний, превышающих упомянутый максимальный уровень, превосходит значение остановки максимального уровня, отключают электропитание блока привода (16);
в) выполняют второе сравнение, при котором многократно сравнивают между собой два последовательных показания тока, и в случае, если количество сравнений, при которых разница показаний меньше первого уровня линейного нарастания, превышает значение счетчика устойчивого состояния, определяют условие устойчивого состояния для тока, подаваемого на блок привода, и
г) в случае определения устойчивого состояния устанавливают по меньшей мере один предел обнаружения перегрузки на основе по меньшей мере одного показания устойчивого состояния тока, подаваемого на блок привода.
д) выполняют третье сравнение, при котором показания тока многократно сравнивают с мягким максимальным уровнем, устанавливаемым на основе по меньшей мере одного показания устойчивого состояния тока, и в случае, если количество показаний, превышающих упомянутый мягкий максимальный уровень, превосходит значение остановки мягкого максимального уровня, отключают электропитание блока привода (16).
е) выполняют четвертое сравнение, при котором многократно сравнивают между собой последовательные показания тока, и в случае, если разница между показаниями неоднократно превышает второй уровень линейного нарастания, отключают электропитание блока привода (16).
сравнения показаний тока с первым заранее заданным максимальным уровнем и
отключения электропитания блока привода (16) в случае, если количество последовательных показаний, превышающих упомянутый максимальный уровень, превосходит заранее заданное значение остановки максимального уровня.
многократного сравнения между собой двух последовательных показаний тока и
определения условия устойчивого состояния для тока, подаваемого на блок привода (16), в случае, если количество последовательных сравнений, при которых разница показаний меньше первого заранее заданного уровня линейного нарастания, превышает заранее заданный уровень обнаружения устойчивого состояния.
многократного сравнения между собой последовательных показаний тока и
отключения электропитания блока привода (16) в случае, если количество сравнений, при которых разница показаний превышает второй заранее заданный уровень линейного нарастания, превосходит заранее заданный уровень обнаружения линейного нарастания.
электрическое измерительное устройство (11), многократно снимающее показания тока, подаваемого на блок привода (16),
устройство (13) обработки данных, сравнивающее показания тока с максимальным уровнем, а также сравнивающее показания тока между собой, и выдающее сигнал, который указывает, требуется ли подача электропитания на блок привода (16), и
электрический выключатель (14), принимающий сигнал от устройства (13) обработки данных и переключающий либо отключающий электропитание блока привода (16).
сравнения показаний с первым заранее заданным максимальным уровнем и
отключения питания блока привода (16) в случае, если количество последовательных показаний, превышающих упомянутый максимальный уровень, превосходит заранее заданное значение остановки максимального уровня.
многократного сравнения между собой двух последовательных показаний и
определения условия устойчивого состояния для тока, подаваемого на блок привода (16), в случае, если количество последовательных сравнений, при которых разница между показаниями ниже первого заранее заданного уровня линейного нарастания, превышает заранее заданный уровень обнаружения устойчивого состояния.
многократного сравнения между собой последовательных показаний и
отключения электропитания блока привода (16) в случае, если количество сравнений, при которых разница между показаниями превышает второй заранее заданный уровень линейного нарастания, превосходит заранее заданный уровень обнаружения линейного нарастания.
многократно снимают показания тока, подаваемого на блок привода (16),
сравнивают показания тока с максимальным уровнем, а также между собой,
генерируют сигнал, указывающий, требуется ли подача электропитания на блок привода (16), и
переключают или отключают электропитание блока привода (16) на основе упомянутого сигнала.
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРУЗКИ И ОБРЫВА ФАЗЫ | 1992 |
|
RU2025858C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2031509C1 |
| Привод ленточного конвейера | 1973 |
|
SU548497A1 |
| Устройство для комплексной релейной защиты электроустановки | 1985 |
|
SU1327258A1 |
| US 4984756 А, 15.01.1991 | |||
| US 5729104 А, 17.03.1998 | |||
| СПОСОБ СОЗДАНИЯ СОЛЕУСТОЙЧИВЫХ ФОРМ МЯГКОЙ ПШЕНИЦЫ | 1998 |
|
RU2138156C1 |
| DE 19901840 А, 25.05.2000. | |||

