УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к электроинструменту.
[0002] Электроинструмент, описанный в японском патенте No. 3638977 выполнен с возможностью определения, посредством датчика ускорения, скручивания основного корпуса электроинструмента вокруг выходного вала и прекращения приведения электродвигателя в действие.
[0003] Электроинструмент, описанный в опубликованной японской заявке No. 2008-178935, выполнен с возможностью осуществления, так называемого, мягкого безнагрузочного управления. При мягком безнагрузочном управлении, электродвигатель приводится в действие с низкой угловой скоростью вращения, когда выходной вал не нагружен, и угловая скорость вращения электродвигателя повышается, когда выходной вал нагружается.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Для осуществления такого мягкого безнагрузочного управления, следует определять, нагружается ли рабочая насадка. Кроме того, для определения прилагаемой нагрузки на рабочую насадку, обычно используют ток, протекающий через электродвигатель, как раскрывается в вышеупомянутом японском патенте No. 3638977.
[0005] В данном случае, приложение нагрузки к рабочей насадке во время вращения выходного вала можно определять по колебаниям тока, протекающего через электродвигатель. Однако, нагружается ли рабочая насадка во время ударного воздействия на обрабатываемую деталь вследствие возвратно-поступательного движения выходного вала, точно определять нельзя в некоторых случаях по причине, что ударное воздействие не влияет на ток, протекающий через электродвигатель.
[0006] Соответственно, в некоторых случаях мягкого безнагрузочного управления по току, протекающему через электродвигатель, невозможно определить факт того, что рабочая насадка оказывает ударное воздействие на обрабатываемую деталь, и невозможно повысить угловую скорость вращения электродвигателя.
[0007] При этом, один потенциальный метод определения того, что рабочая насадка нагружалась вследствие ударного воздействия на обрабатываемую деталь, состоит в определении вибраций, которые происходят в основном корпусе инструмента вследствие ударного воздействия на обрабатываемую деталь. В данном случае, на основном корпусе инструмента можно оборудовать датчик для определения вибрации (т.е. для определения нагрузки).
[0008] Однако, когда на основном корпусе инструмента оборудуют датчик для определения движения скручивания вокруг выходного вала основного корпуса инструмента, в основном корпусе инструмента следует обеспечить пространство для оборудования другого датчика для определения вибраций, что может препятствовать уменьшению размера электроинструмента. Это приводит к увеличению числа компонентов электроинструмента и увеличению трудозатрат в человеко-часах на изготовление электроинструмента, поскольку в основной корпус инструмента вмонтируют другой датчик, так что себестоимость электроинструмента может возрасти.
[0009] В одном аспекте настоящего изобретения, определение скручивания основного корпуса электроинструмента в окружном направлении выходного вала и определение нагрузки на выходной вал электроинструмента, обусловленной ударным воздействием на обрабатываемую деталь, желательно выполнять без увеличения размеров основного корпуса электроинструмента.
[0010] Электроинструмент в соответствии с одним аспектом настоящего изобретения включает в себя корпус, электродвигатель, выходной вал, первую механическую передачу, вторую механическую передачу, общий датчик, детектор скручивания и детектор вибрационной нагрузки. Электродвигатель помещается в корпусе. Выходной вал помещается в корпусе и включает в себя первый конец для присоединения режущего инструмента.
[0011] Первая механическая передача помещается в корпусе и передает вращение электродвигателя выходному валу, чтобы вращать выходной вал в окружном направлении выходного вала. Вторая механическая передача помещается в корпусе и передает вращение электродвигателя на выходной вал, чтобы вынуждать выходной вал двигаться возвратно-поступательно в аксиальном направлении выходного вала.
[0012] Общий датчик измеряет перемещение корпуса и выдает сигнал измерения, показывающий измеренное перемещение. Детектор скручивания определяет движение скручивания корпуса в окружном направлении выходного вала по сигналу измерения.
[0013] Детектор вибрационной нагрузки определяет вибрацию корпуса в аксиальном направлении выходного вала по сигналу измерения и определяет нагрузку на выходной вал по полученной вибрации.
[0014] При использовании электроинструмента, имеющего приведенную конфигурацию, скручивание корпуса в окружном направлении выходного вала и приложение нагрузки на выходной вал, обусловленной ударным воздействием на обрабатываемую деталь, можно определить с использованием не независимых датчиков, а общего датчика. Следовательно, это исключает потребность в оборудовании независимых датчиков.
[0015] Соответственно, электроинструмент по настоящему изобретению может ограничивать увеличение размера основного корпуса электроинструмента и увеличение себестоимости электроинструмента.
[0016] Электроинструмент может дополнительно включать в себя первый ограничитель угловой скорости вращения, который выполнен с возможностью установки верхнего предела угловой скорости вращения электродвигателя равным данной угловой скорости вращения в ответ на определение отсутствия нагрузки на выходной вал посредством детектора вибрационной нагрузки.
В данном случае, верхний предел угловой скорости вращения электродвигателя может быть установлен равным данной угловой скорости вращения в ответ на отсутствие приложенной нагрузки на выходной вал в аксиальном направлении выходного вала.
Электроинструмент может дополнительно включать в себя замедлитель вращения, который выполнен с возможностью замедления вращения электродвигателя в ответ на определение движения скручивания корпуса посредством детектора скручивания.
В данном случае, вращение электродвигателя может замедляться в ответ на движение скручивания корпуса.
Электроинструмент может дополнительно включать в себя стопор вращения, который выполнен с возможностью остановки вращения электродвигателя в ответ на определение движения скручивания корпуса детектором скручивания.
В данном случае, вращение электродвигателя может останавливаться в ответ на движение скручивания корпуса.
Общий датчик может включать в себя датчик ускорения, который выполнен с возможностью измерения ускорения, придаваемого корпусу. Детектор скручивания может определять движение скручивания по ускорению в окружном направлении выходного вала, которое получено из датчика ускорения. Детектор вибрационной нагрузки может определять нагрузку на выходной вал по ускорению в аксиальном направлении выходного вала, которое получено из датчика ускорения.
[0017] Датчик ускорения может выдавать сигнал измерения, показывающий ускорение, сообщаемое корпусу. В данном случае, детектор скручивания может получать ускорение по сигналу измерения после удаления нежелательных низкочастотных составляющих сигнала посредством высокочастотного фильтра.
Высокочастотный фильтр может включать в себя аналоговый фильтр или цифровой фильтр.
[0018] Если высокочастотный фильтр включает в себя цифровой фильтр, то можно получить точность определения ускорения выше, чем в случае, если аналоговый фильтр удаляет нежелательные составляющие сигнала из сигнала измерения.
[0019] Другими словами, немедленно после подачи электропитания в электроинструмент, опорное напряжение схемы, включающей в себя высокочастотный фильтр, может быстро возрасти с 0 В до заданного напряжения. Если высокочастотный фильтр включает в себя аналоговый фильтр, то может потребоваться время на стабилизацию сигнала измерения, выдаваемого из схемы.
[0020] Если сигнал измерения подвергается обработке путем фильтрации цифровым фильтром, то уровень сигнала измерения немедленно после подачи электропитания может установиться в начальное значение, поэтому флуктуации в сигнале измерения (данных) можно уменьшить.
[0021] Следовательно, ускорение может точно определяться немедленно с момента подачи электропитания в электроинструмент. Таким образом, можно уменьшить число ошибочных определений движения скручивания корпуса, обусловленных ошибкой определения ускорения.
Детектор скручивания может повторно устанавливать на нуль полученное ускорение в ответ на остановку вращения электродвигателя.
[0022] Когда вращение электродвигателя останавливается, движения скручивания корпуса не происходит. При повторной установке на нуль ускорения (т.е. результатов вычислений, представляемых цифровым фильтром), когда вращение электродвигателя останавливается, можно предотвратить или ограничить накопление ошибок в результатах вычисления.
[0023] Детектор вибрационной нагрузки может получать ускорение по сигналу измерения после удаления нежелательных низкочастотных составляющих сигнала посредством высокочастотного фильтра.
Высокочастотный фильтр может включать в себя аналоговый фильтр или цифровой фильтр.
Если высокочастотный фильтр включает в себя цифровой фильтр, то можно получить точность определения ускорения выше, чем в случае, если аналоговый фильтр удаляет нежелательные составляющие сигнала из сигнала измерения.
Другими словами, немедленно после подачи электропитания в электроинструмент, опорное напряжение схемы, включающей в себя высокочастотный фильтр, может быстро возрасти с 0 В до заданного напряжения. Если высокочастотный фильтр включает в себя аналоговый фильтр, то может потребоваться время на стабилизацию сигнала измерения, выдаваемого из схемы.
Если сигнал измерения подвергается обработке путем фильтрации цифровым фильтром, то уровень сигнала измерения немедленно после подачи электропитания может установиться в начальное значение, поэтому флуктуации в сигнале измерения (данных) можно уменьшить.
Следовательно, ускорение может точно определяться немедленно с момента подачи электропитания в электроинструмент. Таким образом, можно уменьшить число ошибочных определений вибрации корпуса, обусловленных ошибкой определения ускорения.
Детектор вибрационной нагрузки может повторно устанавливать на нуль полученное ускорение в ответ на остановку вращения электродвигателя.
Когда вращение электродвигателя останавливается, режущий инструмент не выполняет операции ударного воздействия. При повторной установке на нуль ускорения (т.е. результатов вычислений, представляемых цифровым фильтром), когда вращение электродвигателя останавливается, можно предотвратить или ограничить накопление ошибок в результатах вычисления.
Датчик ускорения может измерять первое ускорение вдоль первой оси определения и второе ускорение вдоль второй оси ускорения.
В данном случае, детектор скручивания может определять движение скручивания корпуса в соответствии с первым ускорением и/или вторым ускорением. Детектор вибрационной нагрузки может определять вибрацию корпуса в соответствии с первым ускорением и/или вторым ускорением.
[0024] В качестве альтернативы, датчик ускорения может измерять ускорение вдоль единственной оси определения. В данном случае, датчик ускорения может располагаться в корпусе так, что единственная ось определения ориентирована наклонно относительно плоскости, которая задается осью вдоль выходного вала и ортогональной осью, которая ортогональна выходному валу. Ортогональная ось может быть, например, осью, вдоль которой датчик ускорения измеряет ускорение в окружном направлении выходного вала.
[0025] Если датчик ускорения расположен приведенным образом, то ускорение в направлении ортогональной оси или направлении выходного вала можно определить из ускорения, измеренного датчиком ускорения.
[0026] Соответственно, движение скручивания корпуса или вибрацию корпуса можно определять с помощью датчика ускорения для измерения ускорения в единственном аксиальном направлении.
[0027] Электроинструмент может дополнительно включать в себя токовый детектор нагрузки, который выполнен с возможностью определения нагрузки на выходной вал по току, протекающему через электродвигатель. В данном случае можно определять нагрузку, прилагаемую к режущему инструменту в результате вращения выходного вала. Кроме того, в данном случае, электроинструмент может дополнительно включать в себя второй ограничитель угловой скорости вращения, который выполнен с возможностью установки верхнего предела угловой скорости вращения электродвигателя равным данной угловой скорости вращения в ответ на определение отсутствия нагрузки на выходной вал посредством как токового детектора нагрузки, так и детектора вибрационной нагрузки.
[0028] В данном электроинструменте верхний предел угловой скорости вращения электродвигателя может быть установлен равным данной угловой скорости вращения в ответ на отсутствие приложенной нагрузки на выходной вал в аксиальном направлении или окружном направлении выходного вала.
Электроинструмент может дополнительно включать в себя контроллер электродвигателя, который помещается в корпусе и выполнен с возможностью управления приведением электродвигателя в действие согласно команде извне электроинструмента.
В данном случае, приведением электродвигателя в действие можно управлять согласно команде извне электроинструмента.
Другой аспект настоящего изобретения представляет собой электроинструмент, который включает в себя корпус; электродвигатель, который помещается в корпусе; выходной вал, который помещается в корпусе, при этом выходной вал включает в себя первый конец для присоединения режущего инструмента; первую механическую передачу, которая помещается в корпусе и выполнена с возможностью передачи вращения электродвигателя выходному валу, чтобы вращать выходной вал в окружном направлении выходного вала; вторую механическую передачу, которая помещается в корпусе и выполнена с возможностью передачи вращения электродвигателя на выходной вал, чтобы вынуждать выходной вал двигаться возвратно-поступательно в аксиальном направлении выходного вала; датчик, который выполнен с возможностью измерения перемещения корпуса, причем датчик дополнительно выполнен с возможностью выдачи сигнала измерения, показывающего измеренное перемещение; детектор скручивания, который выполнен с возможностью определения движения скручивания корпуса в окружном направлении выходного вала по сигналу измерения; и детектор вибрационной нагрузки, который выполнен с возможностью определения вибрации корпуса в аксиальном направлении выходного вала по сигналу измерения, причем детектор вибрационной нагрузки дополнительно выполнен с возможностью определения нагрузки на выходной вал по полученной вибрации.
Данный электроинструмент может ограничивать увеличение размера основного корпуса электроинструмента и увеличение себестоимости электроинструмента.
Еще один аспект настоящего изобретения представляет собой способ определения движения скручивания основного корпуса электроинструмента и определения нагрузки на выходной вал электроинструмента. Способ включает в себя определение движения скручивания основного корпуса вдоль окружного направления выходного вала по сигналу измерения, выдаваемому из датчика, при этом датчик располагается в основном корпусе, выполнен с возможностью измерения перемещения основного корпуса и дополнительно выполнен с возможностью выдачи сигнала измерения, показывающего измеренное перемещение; определение вибрации основного корпуса в аксиальном направлении выходного вала по сигналу измерения; и определение нагрузки на выходной вал по полученной вибрации.
При использовании данного способа, скручивание основного корпуса в окружном направлении выходного вала и приложение нагрузки к выходному валу вследствие ударного воздействия на обрабатываемую деталь можно определять без увеличения размера основного корпуса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0029] Примерный вариант осуществления настоящего изобретения описан в дальнейшем со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 - вид в разрезе конструкции ударной дрели в одном варианте осуществления;
Фиг. 2 - внешний вид в перспективе ударной дрели;
Фиг. 3 - вид сбоку ударной дрели с пылесборным устройством, закрепленным к ударной дрели;
Фиг. 4 - блок-схема, представляющая электрическую схему системы управления приводом ударной дрелью;
Фиг. 5 - блок-схема последовательности операций процесса управления, выполняемого в схеме управления в контроллере электродвигателя;
Фиг. 6 - блок-схема последовательности операций, подробно представляющая процесс ввода сигналов, показанный на фиг. 5;
Фиг. 7 - блок-схема последовательности операций, подробно представляющая процесс управления электродвигателем, показанный на фиг. 5;
Фиг. 8 - блок-схема последовательности операций, подробно представляющая процесс мягкого безнагрузочного управления, показанный на фиг. 7;
Фиг. 9 - блок-схема последовательности операций процесса определения токовой нагрузки, выполняемого в процессе аналого-цифрового преобразования, показанного на фиг. 5;
Фиг. 10 - блок-схема последовательности операций, подробно представляющая процесс вывода сигналов, показанный на фиг. 5;
Фиг. 11 - блок-схема последовательности операций, подробно представляющая процесс вывода сигналов для электродвигателя, показанный на фиг. 10;
Фиг. 12 - блок-схема последовательности операций процесса определения нагрузки ускорения, выполняемый в схеме определения ускорения в детекторе скручивания;
Фиг. 13A - блок-схема последовательности операций части процесса определения движения скручивания, выполняемого в схеме определения ускорения в детекторе скручивания;
Фиг. 13B - блок-схема последовательности операций, представляющая остальную часть процесса определения движения скручивания;
Фиг. 14 - диаграмма для пояснения работы высокочастотного фильтра в процессах определения, представленных на фиг. 12, 13A и 13B, по сравнению с работой аналогового фильтра;
Фиг. 15A - вид сбоку ударной дрели, включающей в себя датчик ускорения, имеющий единственную ось определения; и
Фиг. 15B - вид снизу ударной дрели.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0030] Ударная дрель 2 по настоящему варианту осуществления выполнена с возможностью осуществления долбления или сверления на обрабатываемой детали (например, бетонной) посредством ударного воздействия режущим инструментом 4, например, ударным сверлом, вдоль продольной оси режущего инструмента 4 или посредством его вращения вокруг продольной оси.
[0031] Как показано на фиг. 1, ударная дрель 2 включает в себя основной корпус 10, определяющий контур ударной дрели 2. Режущий инструмент 4 разъемно закрепляется к оконечности основного корпуса 10 посредством держателя 6 инструмента. Держатель 6 инструмента имеет цилиндрическую форму и функционирует как выходной вал.
[0032] Режущий инструмент 4 вставляется в установочное отверстие 6a для инструмента в держатель 6 инструмента и удерживается держателем 6 инструмента. Режущий инструмент 4 может двигаться возвратно-поступательно вдоль продольной оси режущего инструмента 4 относительно держателя 6 инструмента, но его вращательное движение вокруг продольной оси режущего инструмента 4 относительно держателя 6 инструмента ограничено.
[0033] Основной корпус 10 включает в себя корпус 12 электродвигателя и корпус 14 редуктора 14. Корпус 12 электродвигателя вмещает электродвигатель 8. Корпус 14 редуктора вмещает механизм 20 преобразования движения, элемент 30 ударного воздействия, механизм 40 передачи вращения и механизм 50 переключения режимов. Механизм 40 передачи вращения соответствует одному примеру первой механической передачи в настоящем изобретении. Механизм 20 преобразования движения и элемент 30 ударного воздействия соответствуют одному примеру второй механической передачи в настоящем изобретении.
[0034] Основной корпус 10 соединен с рукояткой 16 с противоположной стороны от держателя 6 инструмента. Рукоятка 16 включает в себя удерживаемую часть 16A, которая удерживается оператором. Данная удерживаемая часть 16A продолжается в направлении, ортогональном продольной оси режущего инструмента 4 (т.е. центрального вала держателя 6 инструмента), (вертикальном направлении на фиг. 1), и часть удерживаемой части 16A находится на продолжении (т.е. продольной оси) режущего инструмента 4.
[0035] Первый конец удерживаемой части 16A (т.е. конец, расположенный рядом с продольной осью режущего инструмента 4) соединен с корпусом 14 редуктора, и второй конец удерживаемой части 16A (т.е. конец, удаленный от продольной оси режущего инструмента 4) соединен с корпусом 12 электродвигателя.
[0036] Рукоятка 16 зафиксирована к корпусу 12 электродвигателя таким образом, что она может поворачиваться вокруг опорной оси 13. Рукоятка 16 и корпус 14 редуктора соединены друг с другом через виброизолирующую пружину 15.
[0037] Пружина 15 ограничивает вибрации, которые возникают в корпусе 14 редуктора (т.е. основном корпусе 10) вследствие ударного действия режущего инструмента 4, так что передача вибраций от основного корпуса 10 к рукоятке 16 ограничивается.
[0038] В нижеприведенном описании, для удобства описания, сторона, на которой расположен режущий инструмент 4 вдоль направления продольной оси, параллельного продольной оси режущего инструмента 4, определяется как передняя сторона. Сторона, на которой расположена рукоятка 16 вдоль направления продольной оси, определяется как задняя сторона. Сторона, на которой расположено соединение между рукояткой 16 и корпусом 14 редуктора вдоль направления, которое ортогонально направлению продольной оси, и в котором продолжается удерживаемая часть 16A, (т.е. вертикального направления на фиг. 1) определяется как верхняя сторона. Сторона, на которой расположено соединение между рукояткой 16 и корпусом 12 электродвигателя вдоль вертикального направления на фиг. 1, определяется как нижняя сторона.
[0039] Кроме того, в нижеприведенном описании, ось Z определяется как ось, которая продолжается вдоль продольной оси режущего инструмента 4 (т.е. центрального оси держателя 6 инструмента, служащего выходным валом), ось Y определяется как ось, которая ортогональна оси Z и продолжается в вертикальном направлении, и ось X определяется как ось, которая ортогональна оси Z и оси Y и продолжается в горизонтальном направлении (т.е. направлении ширины основного корпуса 10) (смотри фиг. 2).
[0040] В основном корпусе 10 корпус 14 редуктора расположен с передней стороны, и корпус 12 электродвигателя расположен с нижней стороны корпуса 14 редуктора. Кроме того, рукоятка 16 присоединена к задней стороне корпуса 14 редуктора.
[0041] В данном варианте осуществления электродвигатель 8, размещенный в корпусе 12 электродвигателя, является бесщеточным электродвигателем, но не ограничен бесщеточным электродвигателем в настоящем изобретении. Электродвигатель 8 расположен так, что вращающийся вал 8A электродвигателя 8 пересекает продольную ось режущего инструмента 4 (т.е. ось Z). Другими словами, вращающийся вал 8A продолжается в вертикальном направлении ударной дрели 2.
[0042] Как показано на фиг. 2, в корпусе 14 редуктора, захват 38 для поддержки прикреплен к внешней площадке оконечной области, из которой выступает режущий инструмент 4, посредством кольцевого фиксирующего элемента 36. Подобно рукоятке 16, захват 38 для поддержки выполнен с возможностью захватывания пользователем. Конкретнее, пользователь захватывает рукоятку 16 одной рукой и захват 38 для поддержки другой рукой, тем самым надежнее удерживая ударную дрель 2.
[0043] Как показано на фиг. 3, пылесборное устройство 66 закреплено к передней стороне корпуса 12 электродвигателя. Как показано на фиг. 1 и 2, для закрепления пылесборного устройства 66, на нижнем и переднем участке корпуса 12 электродвигателя (т.е. нижнем и переднем участке электродвигателя 8) обеспечен углубленный участок для закрепления пылесборного устройства 66. Соединитель 64 для подключения пылесборного устройства 66 обеспечен на углубленном участке.
[0044] Кроме того, детектор 90 скручивания размещается внутри нижнего участка корпуса 12 электродвигателя (т.е. внутри нижнего участка электродвигателя 8). Когда режущий инструмент 4 вращается для выполнения операции сверления, и режущий инструмент 4 врезается в обрабатываемую деталь, детектор 90 скручивания определяет скручивание основного корпуса 10.
[0045] Аккумуляторные батареи 62A и 62B, выполняющие функцию источника питания ударной дрели 2, обеспечены c задней стороны области вмещения детектора 90 скручивания. Аккумуляторные батареи 62A и 62B разъемно присоединяются к батарейному разъему 60, обеспеченному с нижней стороны корпуса 12 электродвигателя.
[0046] Батарейный разъем 60 находится выше нижней торцовой поверхности области вмещения детектора 90 скручивания (т.е. нижней поверхности корпуса 12 электродвигателя). Нижние торцовые поверхности аккумуляторных батарей 62A и 62B закреплены к батарейному разъему 60 заподлицо с нижней торцовой поверхностью области вмещения детектора 90 скручивания.
[0047] Контроллер 70 электродвигателя обеспечен с верхней стороны батарейного разъема 60, в корпусе 12 электродвигателя. Контроллер 70 электродвигателя управляет приведением в действие электродвигателя 8 и получает питание от аккумуляторных батарей 62A и 62B.
[0048] Вращение электродвигателя 8 преобразуется в линейное движение посредством механизма 20 преобразования движения и затем передается элементу 30 ударного воздействия. Элемент 30 ударного воздействия развивает ударное усилие в направлении вдоль продольной оси режущего инструмента 4. Вращение электродвигателя 8 замедляется механизмом 40 передачи вращения и также передается режущему инструменту 4. Другими словами, электродвигатель 8 приводит режущий инструмент 4 во вращение вокруг продольной оси. Электродвигатель 8 приводится в движение нажимным действием на пускатель 18, расположенный на рукоятке 16.
[0049] Как показано на фиг. 1, механизм 20 преобразования движения расположен с верхней стороны вращающегося вала 8A электродвигателя 8.
Механизм 20 преобразования движения включает в себя распределительный вал 21, вращающийся блок 23, качающийся элемент 25, поршень 27 и цилиндр 29. Распределительный вал 21 расположен с пересечением вращающегося вала 8A и приводится во вращение вращающимся валом 8A. Вращающийся блок 23 закреплен на распределительном валу 21. Качающийся элемент 25 качается в направлении вперед-назад ударной дрели 2, при вращении распределительного вала 21 (вращающегося блока 23). Поршень 27 представляет собой имеющий дно цилиндрический элемент, вмещающий с возможностью скольжения боек 32, который описан в дальнейшем. Поршень 27 двигается возвратно-поступательно в направлении вперед-назад ударной дрели 2, при качании качающегося элемента 25.
[0050] Цилиндр 29 объединен с держателем 6 инструмента. Цилиндр 29 вмещает поршень 27 и ограничивает заднюю область держателя 6 инструмента.
[0051] Как показано на фиг. 1, элемент 30 ударного воздействия расположен на передней стороне механизма 20 преобразования движения и на задней стороне держателя 6 инструмента. Элемент 30 ударного воздействия включает в себя вышеупомянутый боек 32 и ударный палец 34. Боек 32 выполняет функцию молотка и бьет по ударному пальцу 34, расположенному с передней стороны бойка 32.
[0052] Пространство в поршне 27 с задней стороны бойка 32 образует воздушную камеру 27a, и воздушная камера 27a служит пневматической пружиной. Соответственно, качание качающегося элемента 25 в направлении вперед-назад ударной дрели 2 вынуждается поршень 27 двигаться возвратно-поступательно в направлении вперед-назад, с приведением бойка 32 в движение.
[0053] Другими словами, движение поршня 27 вперед вынуждает боек 32 двигаться вперед под действием пневматической пружины и ударять по ударному пальцу 34. Соответственно, ударный палец 34 двигается вперед и ударяет по режущему инструменту 4. Следовательно, режущий инструмент 4 ударно действует на обрабатываемую деталь. Следовательно, в данном варианте осуществления, дополнительно к держателю 6 инструмента, элемент 30 ударного воздействия, включающий в себя ударный палец 34, представляет собой один пример выходного вала по настоящему изобретению.
[0054] Кроме того, движение поршня 27 назад движет боек 32 назад и, тем самым, создает в воздушной камере 27a положительное давление воздуха относительно атмосферного давления. Кроме того, сила противодействия, развивающаяся, когда режущий инструмент 4 ударно действует на обрабатываемую деталь, также перемещает боек 32 и ударный палец 34 назад.
[0055] Это вынуждает боек 32 и ударный палец 34 двигаться возвратно-поступательно в направлении вперед-назад ударной дрели 2. Боек 32 и ударный палец 34, которые приводятся в движение действием пневматической пружины воздушной камеры 27a, перемещаются в направлении вперед-назад, вслед за движением поршня 27 в направлении вперед-назад.
[0056] Как показано на фиг. 1, механизм 40 передачи вращения расположен на передней стороне механизма 20 преобразования движения и с нижней стороны от элемента 30 ударного воздействия. Механизм 40 передачи вращения включает в себя механизм замедления редуктора. Механизм замедления редуктора включает в себя множество шестерен, включающее в себя первую шестерню 42, вращающуюся вместе с распределительным валом 21, и вторую шестерню 44 для зацепления с первой шестерней 42.
[0057] Вторая шестерня 44 объединена с держателем 6 инструмента (в частности, цилиндром 29) и передает вращение первой шестерни 42 на держатель 6 инструмента. Таким образом, режущий инструмент 4, удерживаемый держателем 6 инструмента, вращается. Вращение вращающегося вала 8A электродвигателя 8 замедляется посредством, кроме механизма 40 передачи вращения, первой конической шестерней, которая обеспечена на передней оконечности вращающегося вала 8A, и второй конической шестерней, которая обеспечена на задней оконечности распределительного вала 21 и зацепляется с первой конической шестерней.
[0058] Ударная дрель 2 по данному варианту осуществления имеет три режима привода, включающих в себя ударный режим, режим ударного сверления и режим сверления.
В ударном режиме режущий инструмент 4 выполняет операцию ударного действия в направлении продольной оси, с оказанием, тем самым, ударного воздействия на обрабатываемую деталь. В режиме ударного сверления, режущий инструмент 4 выполняет операцию вращения вокруг продольной оси в дополнение к операции ударного действия, так что обрабатываемая деталь высверливается, при одновременной ударной обработке режущим инструментом 4. В режиме сверления режущий инструмент 4 не выполняет операции ударного действия, а выполняет только операцию вращения, так что обрабатываемая деталь сверлится.
[0059] Режим привода переключается механизмом 50 переключения режимов. Механизм 50 переключения режимов включает в себя элементы 52 и 54 передачи вращения, показанные на фиг. 1, и селектор 58, показанный на фиг. 3.
[0060] Элементы 52 и 54 передачи вращения являются, в общем, цилиндрическими элементами и подвижными вдоль распределительного вала 21. Элементы 52 и 54 передачи вращения находятся в шлицевом зацеплении с распределительным валом 21 и вращаются совместно с распределительным валом 21.
[0061] Элемент 52 передачи вращения, перемещающийся в заднюю сторону распределительного вала 21, зацепляется с канавкой зацепления на передней стороне вращающегося блока 23 и передает вращение электродвигателя 8 на вращающийся блок 23. Следовательно, режим привода ударной дрели 2 устанавливается в ударный режим или режим ударного сверления.
[0062] Элемент 54 передачи вращения, перемещающийся в переднюю сторону распределительного вала 21, зацепляется с первой шестерней 42 и передает вращение электродвигателя 8 на первую шестерню 42. Следовательно, режим привода ударной дрели 2 устанавливается в режим ударного сверления или режим сверления.
[0063] Селектор 58, поворачиваемый пользователем смещает элементы 52 и 54 передачи вращения на распределительный вал 21. Селектор 58 поворачивают и устанавливают в любое из трех положений, показанных на фиг. 3, для установки, тем самым, режима привода ударной дрели 2 в любой из режимов: ударный режим, режим ударного сверления и режим сверления.
[0064] Конструкции контроллера 70 электродвигателя и детектора 90 скручивания описаны ниже со ссылкой на фиг. 4.
Детектор 90 скручивания включает в себя датчик 92 ускорения и схему 94 определения ускорения. Датчик 92 ускорения и схема 94 определения ускорения смонтированы на общей монтажной плате и содержатся в общем корпусе.
Датчик 92 ускорения измеряет ускорения (в частности, значения ускорений) в направлениях по трем осям (т.е. оси X, оси Y и оси Z).
Схема 94 определения ускорения подвергает сигналы измерения из датчика 92 ускорения обработке для определения скручивания основного корпуса 10.
[0065] Точнее, схема 94 определения ускорения включает в себя блок микроконтроллера (MCU), включающий в себя центральный процессор (CPU), постоянную память (ROM) и оперативную память (RAM). Схема 94 определения ускорения выполняет процесс определения движения скручивания, который описан в дальнейшем, чтобы определить поворот основного корпуса 10 вокруг оси Z (т.е. продольной оси режущего инструмента 4) на предварительно заданный угол, в соответствии с сигналами измерения (в частности, выходным сигналом, зависящим от ускорения в направлении оси X) из датчика 92 ускорения.
[0066] Схема 94 определения ускорения дополнительно выполняет процесс определения нагрузки ускорения, чтобы определить с помощью датчика 92 ускорения вибрации (в частности, величину вибраций), которые возникают в основном корпусе 10 в направлениях трех осей вследствие операции ударного действия режущего инструмента 4. В ходе данного процесса определения ускорения, схема 94 определения ускорения определяет приложение нагрузки к режущему инструменту 4, если вибрация в основном корпусе 10 (т.е. ускорение) превышает порог.
[0067] Контроллер 70 электродвигателя включает в себя схему 72 привода и схему 80 управления. Схема 72 привода и схема 80 управления смонтированы на другой общей монтажной плате совместно с различными определительными схемами, которые описаны в дальнейшем, и содержатся в другом общем корпусе.
[0068] Схема 72 привода включает в себя переключающие устройства Q1-Q6 и выполнена с возможностью получения электропитания от аккумуляторной батареи 62 (в частности, последовательно соединенных аккумуляторных батарей 62A и 62B) и подавать ток во множество фазных обмоток в электродвигателе 8 (который является, в частности, трехфазным бесщеточным электродвигателем). Переключающие устройства Q1-Q6 в данном варианте осуществления являются полевыми транзисторами, но не ограничены полевыми транзисторами в настоящем изобретении. Переключающие устройства Q1-Q6 в другом варианте осуществления могут быть другими переключающими устройствами, кроме полевых транзисторов.
[0069] Переключающие устройства Q1-Q3 обеспечены каждый как, так называемый, переключатель верхнего плеча между линией электропитания и одним соответствующим выводом, выбранным из выводов U, V и W электродвигателя 8. Линия источника питания соединена с положительным выводом аккумуляторной батареи 62.
[0070] Переключающие устройства Q4-Q6 обеспечены каждый как, так называемый, переключатель нижнего плеча между линией заземления и одним соответствующим выводом, выбранным из выводов U, V и W электродвигателя 8. Линия заземления соединена с отрицательным выводом аккумуляторной батареи 62.
[0071] Конденсатор C1 для ограничения флуктуаций напряжения батареи предусмотрен в цепи питания от аккумуляторной батареи 62 до схемы 72 привода.
Подобно схеме 94 определения ускорения, схема 80 управления включает в себя MCU, включающий в себя CPU, ROM и RAM. Схема 80 управления подает ток во множество фазных обмоток в электродвигателе 8 посредством включения и выключения переключающих устройств Q1-Q6 в схеме 72 привода и вращает электродвигатель 8.
[0072] Точнее, схема 80 управления устанавливает заданную угловую скорость вращения и направление вращения электродвигателя 8 в соответствии с командами из пускового переключателя 18a, блок 18b управления изменением скорости, блок 96 установки верхней предельной скорости и блок 19 установки направления вращения и управляет приведением в действие электродвигателя 8.
[0073] Пусковой переключатель 18a включают нажатием пускателя 18 и выполнен с возможностью ввода команды привода для электродвигателя 8 в схему 80 управления. Блок 18b управления изменением скорости выполнен с возможностью формирования сигнала, зависящего от величины нажимного срабатывания пускателя 18 (т.е. степени срабатывания) и изменения заданной угловой скорости вращения в зависимости от упомянутой величины срабатывания.
[0074] Блок 96 установки верхней предельной скорости включает в себя непоказанный дисковый регулятор. Рабочее положение дискового регулятора поэтапно переключается пользователем ударной дрели 2. Блок 96 установки верхней предельной скорости выполнен с возможностью установки верхнего предела угловой скорости вращения электродвигателя 8 в зависимости от рабочего положения дискового регулятора.
[0075] Точнее, блок 96 установки верхней предельной скорости выполнен с возможностью установки верхнего предела угловой скорости вращения электродвигателя 8 между угловой скоростью вращения выше, чем безнагрузочная угловая скорость вращения при мягком безнагрузочном управлении, которая описана в дальнейшем, и угловой скоростью вращения ниже, чем безнагрузочная угловая скорость вращения.
[0076] Блок 19 установки направления вращения выполнен с возможностью установки направления вращения электродвигателя 8 на нормальное или противоположное направление в результате воздействия пользователя и обеспечен в данном варианте осуществления с верхней стороны от пускателя 18, как показано на фиг. 2 и 3. Вращение электродвигателя 8 в нормальном направлении допускает сверление обрабатываемой детали.
[0077] Схема 80 управления устанавливает заданную угловую скорость вращения электродвигателя 8 в соответствии с сигналом из блока 18b управления изменением скорости и верхнюю предельную угловую скорость вращения, установленную посредством блока 96 установки верхней предельной скорости. В частности, схема 80 управления устанавливает заданную угловую скорость вращения, зависящую от величины срабатывания (степени срабатывания) пускателя 18, таким образом, что угловая скорость вращения электродвигателя 8 достигает верхней предельной угловой скорости вращения, установленной блоком 96 установки верхней предельной скорости, когда пускатель 18 нажимают до максимальной величины.
[0078] Схема 80 управления устанавливает продолжительность включения привода в группе переключающих устройств Q1-Q6 для приведения во вращение электродвигателя 8 посредством передачи управляющего сигнала, основанного на продолжительности включения привода, в схему 72 привода, в соответствии с установленными заданными угловой скоростью вращения и направлением вращения.
[0079] Светодиод (СД) 84 выполняющий функцию осветителя (называемый в дальнейшем «осветительным СД 84») обеспечен на передней стороне корпуса 12 электродвигателя. Когда пусковой переключатель 18a включают, схема 80 управления включает осветительный СД 84, чтобы освещать участок обрабатываемой детали, подлежащий обработке режущим инструментом 4.
[0080] Для электродвигателя 8 предусмотрены датчики 81 углового положения. Датчики 81 углового положения измеряют угловую скорость вращения и угловое положение электродвигателя 8 (точнее, угловое положение ротора электродвигателя 8) и передают сигналы измерения в контроллер 70 электродвигателя. Контроллер 70 электродвигателя включает в себя схему 82 определения углового положения. Схема 82 определения углового положения определяет угловое положение, необходимое для установки времени включения питания каждой фазной обмотки в электродвигателе 8, в соответствии с сигналами измерения из датчиков 81 углового положения.
[0081 Контроллер 70 электродвигателя дополнительно включает в себя схему 78 определения напряжения, схему 74 определения тока и схему 76 определения температуры.
[0082] Схема 78 определения напряжения определяет значение напряжения батареи от аккумуляторной батареи 62. Схема 74 определения тока определяет значение тока, протекающего через электродвигатель 8, с помощью резистора R1, включенного в линию тока электродвигателя 8.
[0083] Схема 76 определения температуры определяет температуру контроллера 70 электродвигателя.
Схема 80 управления принимает сигналы измерения из схемы 78 определения напряжения, схемы 74 определения тока, схемы 76 определения температуры, и схемы 82 определения углового положения и сигналы измерения из детектора 90 скручивания.
Схема 80 управления ограничивает угловую скорость вращения электродвигателя 8, который приводится в движение, или прекращает привод электродвигателя 8 в соответствии с сигналами измерения из схемы 78 определения напряжения, схемы 74 определения тока, схемы 76 определения температуры и схемы 82 определения углового положения.
[0084] Контроллер 70 электродвигателя включает в себя непоказанный стабилизатор для получения мощности от аккумуляторной батареи 62 и формирования постоянного напряжения Vcc источника питания.
[0085] Напряжение Vcc источника питания, формируемое стабилизатором, подается в MCU схемы 80 управления и схему 94 определения ускорения детектора 90 скручивания. Кроме того, после определения скручивания основного корпуса 10 от ускорения в направлении оси X, схема 94 определения ускорения передает сигнал ошибки в схему 80 управления.
[0086] Данный сигнал ошибки передается для прекращения приведения электродвигателя 8 в действие. Когда основной корпус 10 не скручивается, схема 94 определения ускорения передает сигнал отсутствия ошибки в схему 80 управления.
[0087] После определения приложения к режущему инструменту 4 нагрузки от вибрации (т.е. ускорения) основного корпуса 10, схема 94 определения ускорения передает сигнал нагрузки в схему 80 управления. Сигнал нагрузки указывает на то, что режущий инструмент 4 находится в состоянии приложения нагрузки. Когда схема 94 определения ускорения не определяет приложения нагрузки к режущему инструменту 4, схема 94 определения ускорения передает сигнал отсутствия нагрузки в схему 80 управления. Сигнал отсутствия нагрузки указывает на то, что режущий инструмент 4 находится в состоянии отсутствия без приложения нагрузки.
[0088] Пылесборное устройство 66, закрепленное к передней стороне корпуса 12 электродвигателя собирает всасыванием частицы пыли, которые возникают от обрабатываемой детали при дроблении и сверлении.
[0089] Как показано на фиг. 4, пылесборное устройство 66 включает в себя электродвигатель 67 пылесборника и монтажную плату 69. Электродвигатель 67 пылесборника приводится в действие монтажной платой 69. Пылесборное устройство 66 включает в себя осветительный СД 68, который выполняет функцию освещения участка обрабатываемой детали, подлежащего обработке, вместо осветительного СД LED 84, предусмотренного на корпусе 12 электродвигателя. Это обусловлено тем, что осветительный СД84 закрыт, когда на корпусе 12 электродвигателя закреплено пылесборное устройство 66.
[0090] Когда пылесборное устройство 66 закреплено к корпусу 12 электродвигателя, ток привода подается от аккумуляторной батареи 62 в электродвигатель 67 пылесборника по линии тока на монтажной плате 69.
[0091] Когда пылесборное устройство 66 закрепляют к корпусу 12 электродвигателя, монтажная плата 69 соединяется со схемой 80 управления через соединитель 64. Монтажная плата 69 включает в себя переключающее устройство Q7 и включает и выключает переключающее устройство Q7 для размыкания и замыкания линии тока в электродвигатель 67 пылесборника. Осветительный СД 68 может включаться сигналом возбуждения из схемы 80 управления.
[0092] Процесс управления, выполняемый в схеме 80 управления, поясняется в дальнейшем с помощью блок-схем последовательностей операций, приведенных на фиг. 5-11. Следует отметить, что упомянутый процесс управления реализуется, когда CPU в схеме 80 управления выполняет программу, хранящуюся в ROM, которая представляет собой энергонезависимую память.
[0093] Как показано на фиг. 5, в данном процессе управления, сначала, на этапе S110 (где S означает этап) определяется, истекло ли заданное время отсчета, и время ожидания длится до истечения времени отсчета от выполнения предыдущего процесса с этапа S120. Данное время отсчета соответствует циклу для управления приведением в действие электродвигателя.
[0094] Если на этапе S110 определяется, что время отсчета истекло, то последовательно выполняются процесс ввода сигналов на этапе S120, процесс аналого-цифрового преобразования на этапе S130, процесс управления электродвигателем на этапе S140 и процесс вывода сигналов на этапе S150 и процесс снова возвращается на этап S110. Другими словами, в ходе данного процесса управления, CPU в схеме 80 управления выполняет последовательность процессов на этапах S120-S150 после каждого истечения времени отсчета, то есть, циклически.
[0095] В данном случае, в процессе ввода сигналов на этапе S120, как показано на фиг. 6, сначала выполняется процесс ввода сигналов пускового переключателя (пускателя SW) на этапе S210 для получения рабочего состояния пускателя 18 из пускового переключателя 18a. На последующем этапе S220 выполняется процесс ввода сигналов направления вращения для получения направления вращения электродвигателя 8 из блока 19 установки направления вращения.
[0096] На последующем этапе S230 выполняется процесс ввода сигналов определения движения скручивания для получения результатов определения (сигнала ошибки или сигнала отсутствия ошибки) движения скручивания из детектора 90 скручивания. На последующем этапе S240 выполняется процесс ввода сигналов определения нагрузки ускорения для получения результатов определения нагрузки ускорения из детектора 90 скручивания (сигнала нагрузки или сигнала отсутствия нагрузки).
[0097] И наконец, на этапе S250 выполняется процесс ввода сигналов пылесборного устройства для определения значения напряжения батареи через соединитель 64 пылесборного устройства 66, и процесс ввода сигналов на этапе S120 прекращается. Следует отметить, что процесс ввода сигналов пылесборного устройства на этапе S250 определяет значение напряжения батареи, чтобы определить, закреплено ли пылесборное устройство 66 к корпусу 12 электродвигателя.
[0098] В последующем процессе аналого-цифрового преобразования на этапе S130, посредством аналого-цифрового преобразования, осуществляется выборка сигналов измерения (сигналов напряжения), относящихся к величине нажимного срабатывания пускателя 18 и верхней предельной скорости или значению напряжения, значению тока, температуре и т.п., из блока 18b управления изменением скорости, блока 96 установки верхней предельной скорости, схемы 78 определения напряжения, схемы 74 определения тока, схемы 76 определения температуры и т.п.
[0099] Как показано на фиг. 7, в процессе управления электродвигателем на этапе S140, сначала на этапе S310 определяется, следует ли приводить в действие электродвигатель 8 на основании условий приведения в действие электродвигателя.
В данном варианте осуществления условия приведения в действие электродвигателя выполняются, когда пусковой переключатель 18a находится во включенном состоянии, значение напряжения, значение тока и температура, полученные на этапе S130, являются нормальными, и детектором 90 скручивания не определяется движение скручивания основного корпуса 10 (ввод сигнала отсутствия ошибки).
[0100] Когда условия приведения в действие электродвигателя выполняются, и если на этапе 310 установлено, что электродвигатель 8 следует привести в действие, то процесс переходит на этап S320, и выполняется процесс установки заданной угловой скорости вращения. В ходе данного процесса установки заданной угловой скорости вращения, заданная угловая скорость вращения устанавливается в соответствии с сигналом из блока 18b управления изменением скорости, и верхняя предельная угловая скорость вращения устанавливается блоком 96 установки верхней предельной скорости.
[0101] На последующем этапе S330, выполняется процесс мягкого безнагрузочного управления. В процессе мягкого безнагрузочного управления, когда режущий инструмент 4 находится в ненагруженном состоянии, заданная угловая скорость вращения электродвигателя 8 ограничена на уровне ниже предварительно заданной безнагрузочной угловой скорости Nth вращения.
[0102] На следующем этапе S340 выполняется процесс установки управляющего параметра. В ходе данного процесса установки управляющего параметра, продолжительность включения привода для электродвигателя 8 устанавливается в соответствии с заданной угловой скоростью вращения на этапе S320 или ограничивается на уровне ниже предварительно заданной безнагрузочной угловой скорости Nth вращения на этапе S330. После выполнения данного процесса установки управляющего параметра, процесс управления электродвигателем прекращается.
[0103] Следует отметить, что на этапе S340 продолжительность включения привода устанавливается так, что продолжительность включения привода не изменяется быстро соответственно изменению заданной угловой скорости вращения от угловой скорости вращения, установленной срабатыванием пускателя или подобным образом, до безнагрузочной угловой скорости вращения или в противоположную ей сторону.
[0104] Другими словами, на этапе S340, скорость изменения продолжительности включения привода (т.е. градиент изменения) ограничена так, что угловая скорость вращения электродвигателя 8 может изменяться постепенно. Данное ограничение предназначено для ограничения быстрого изменения угловой скорости вращения электродвигателя 8, когда режущий инструмент 4 приводится в контакт с обрабатываемой деталью или отводится от обрабатываемой детали.
[0105] Когда условий приведения в действие электродвигателя не выполняются, и если определяется, что электродвигатель 8 не следует приводить в действие на этапе S310, то процесс переходит на этап S350, и выполняется процесс установки останова электродвигателя для установки прекращения приведения в действие электродвигателя 8, и процесс управления электродвигателем прекращается.
[0106] Как показано на фиг. 8, в процессе мягкого безнагрузочного управления на следующем этапе S330, сначала на этапе S332 определяется, выполняются ли условия выполнения мягкого безнагрузочного управления (условия мягкого безнагрузочного управления). При мягком безнагрузочном управлении, заданная угловая скорость вращения электродвигателя 8 ограничена на уровне или ниже безнагрузочной угловой скорости Nth вращения.
[0107] В данном варианте осуществления, условия мягкого безнагрузочного управления выполняются в процессе определения токовой нагрузки, показанном на фиг. 9, и в схеме 94 определения ускорения в детекторе 90 скручивания, когда определяется, что режущий инструмент 4 находится в ненагруженном состоянии, и пылесборное устройство 66 не закреплено к ударной дрели 2.
[0108] Если на этапе S332 определяется, что условия мягкого безнагрузочного управления выполняются, то процесс переходит на этап S334, и выполняется определение, превышает ли заданная угловая скорость вращения безнагрузочную угловую скорость Nth вращения (например, 11000 об/мин). Данная безнагрузочная угловая скорость Nth вращения соответствует верхней предельной угловой скорости вращения мягкого безнагрузочного управления.
[0109] Если на этапе S334 определяется, что заданная угловая скорость вращения превышает безнагрузочную угловую скорость Nth вращения, то процесс переходит на этап S336, на котором безнагрузочная угловая скорость Nth вращения применяется к заданной угловой скорости вращения, и процесс мягкого безнагрузочного управления прекращается.
[0110] Если определяется, что условия мягкого безнагрузочного управления не выполняются на этапе S332, или что заданная угловая скорость вращения не превышает безнагрузочную угловую скорость Nth вращения на этапе S334, то процесс мягкого безнагрузочного управления немедленно прекращается.
[0111] Итак, в процессе мягкого безнагрузочного управления, заданная угловая скорость вращения ограничена на уровне или ниже безнагрузочной угловой скорости Nth вращения, если определяется, что режущий инструмент 4 находится в ненагруженном состоянии, как в процессе определения токовой нагрузки, показанном на фиг. 9, так и в схеме 94 определения ускорения, и когда пылесборное устройство 66 не закреплено к ударной дрели 2.
[0112] В процессе аналого-цифрового преобразования на этапе S130 выполняется процесс определения токовой нагрузки, показанный на фиг. 9, для определения, находится ли режущий инструмент 4 в ненагруженном состоянии, в соответствии со значением тока, полученным из схемы 74 определения тока.
[0113] В ходе данного процесса определения токовой нагрузки, во-первых, на этапе S410, определяется, превышает ли значение, полученное посредством аналого-цифрового преобразования (измеренное значение тока), пороговый ток Ith. Данный пороговый ток Ith является значением, предварительно заданным для определения, нагружен ли режущий инструмент 4.
[0114] Если измеренное значение тока превышает пороговый ток Ith, то счетчик нагрузки для определения нагрузки наращивается (+1) на этапе S420, счетчик нулевой нагрузки для определения ненагруженного состояния вычитается (-1) на этапе S430, и процесс переходит на этап S440.
[0115] На этапе S440 определяется, превышает ли счетчик нагрузки детерминационное значение T1 нагрузки. Детерминационное значение T1 нагрузки является значением, предварительно заданным для определения, нагружен ли режущий инструмент 4. Если значение счетчика нагрузки превышает детерминационное значение T1 нагрузки, то процесс переходит на этап S450, и устанавливается флаг распознавания токовой нагрузки, и затем процесс определения токовой нагрузки прекращается.
[0116] Если значение счетчика нагрузки не превышает детерминационное значение T1 нагрузки, то процесс определения токовой нагрузки немедленно прекращается. Флаг распознавания токовой нагрузки показывает, что режущий инструмент 4 находится в нагруженном состоянии и служит для определения того (токовой нагрузки), что нагруженное состояние режущего инструмента 4 определено по значению тока на этапе S332 процесса мягкого безнагрузочного управления.
[0117] Если определяется, что измеренное значение тока находится на уровне или ниже порогового тока Ith на этапе S410, то процесс переходит на этап S460, на котором счетчик нулевой нагрузки наращивается (+1), и на следующий этап S470, на котором счетчик нагрузки вычитается (-1).
[0118] На следующем этапе S480 определяется, превышает ли значение счетчика нулевой нагрузки детерминационное значение T2 нулевой нагрузки. Детерминационное значение T2 нулевой нагрузки является значением, предварительно заданным для определения, находится ли режущий инструмент 4 в ненагруженном состоянии. Если значение счетчика нулевой нагрузки превышает детерминационное значение T2 нулевой нагрузки, то процесс переходит на этап S490, и определяется, что режущий инструмент 4 находится в ненагруженном состоянии, и поэтому флаг распознавания токовой нагрузки снимается, и процесс определения токовой нагрузки прекращается.
[0119] Если значение счетчика нулевой нагрузки не превышает детерминационное значение T2 нулевой нагрузки, то процесс определения токовой нагрузки немедленно прекращается.
Счетчик нагрузки измеряет время, в течение которого измеренное значение тока превышает пороговый ток Ith. В процессе определения токовой нагрузки, с использованием детерминационного значения T1 нагрузки определяется, достигло ли время, измеренное счетчиком нагрузки, предварительно заданного времени. Счетчик нулевой нагрузки измеряет время, в течение которого измеренное значение тока не превышает пороговый ток Ith. В процессе определения токовой нагрузки, с использованием детерминационного значения T2 нулевой нагрузки определяется, достигло ли время, измеренное счетчиком нулевой нагрузки, предварительно заданного времени.
[0120] В данном варианте осуществления детерминационное значение T1 нагрузки меньше, чем детерминационное значение T2 нулевой нагрузки (т.е. время, измеряемое счетчиком нагрузки короче времени, измеряемого счетчиком нулевой нагрузки). Данное различие предназначено для ускоренного определения нагруженного состояния режущего инструмента 4, чтобы угловую скорость вращения электродвигателя 8 можно было установить на заданную угловую скорость вращения в зависимости от величины срабатывания пускателя. Детерминационное значение T1 нагрузки устанавливают равным значению, соответствующему, например, 100 мс, и детерминационное значение T2 нулевой нагрузки устанавливают равным значению, соответствующему, например, 500 мс.
[0121] Как показано на фиг. 10, в процессе вывода сигналов на этапе S150 сначала выполняется процесс вывода сигналов для электродвигателя на этапе S510. В процессе вывода сигналов для электродвигателя, в схему 72 привода передаются управляющий сигнал для приведения в действие электродвигателя 8 с заданной угловой скоростью вращения и сигнал направления вращения для указания направления вращения.
[0122] На следующем этапе S520 выполняется процесс вывода сигналов сбора пыли для передачи сигнала возбуждения для электродвигателя 67 пылесборника в пылесборное устройство 66, закрепленное к ударной дрели 2. Затем выполняется процесс вывода сигнала освещения для передачи сигнала возбуждения в осветительный СД 84, чтобы включить осветительный СД 84 на этапе S530, и процесс вывода сигналов прекращается.
[0123] На этапе S530, если пылесборное устройство 66 закреплено к ударной дрели 2, то в осветительный СД 68, который обеспечен в пылесборном устройстве 66, передается сигнал возбуждения для включения осветительного СД 68.
[0124] Как показано на фиг. 11, в процессе вывода сигналов для электродвигателя на этапе S510, сначала на этапе S511 определяется, следует ли приводить в действие электродвигатель 8. Процесс на этапе S511 выполняется подобно тому, как на этапе S310 в процессе управления электродвигателем.
[0125] Другими словами, на этапе S511 определяется, выполняются ли условия приведения в действие электродвигателя. Данные условия приведения в действие электродвигателя выполняются, когда пусковой переключатель 18a включен, значение напряжения, значение тока и температура, полученные на этапе S130, являются нормальными, и детектором 90 скручивания не определено никакого движения скручивания основного корпуса 10 (ввод сигнала отсутствия ошибки).
[0126] Когда условия приведения в действие электродвигателя выполняются, и если на этапе S511 определяется, что электродвигатель 8 следует привести в действие, то процесс переходит на этап S512, и начинается передача управляющего сигнала в схему 72 привода.
[0127] На следующем этапе S513 определяется, является ли направление вращения электродвигателя 8 нормальным направлением (направлением вперед). Если направление вращения электродвигателя 8 является нормальным направление (направлением вперед), то процесс переходит на этап S514, на котором сигнал направления вращения, который означает «направление вперед» как направление вращения электродвигателя 8, передается в схему 72 привода, и процесс вывода сигналов для электродвигателя прекращается.
[0128] Если на этапе S513 определяется, что направление вращения электродвигателя 8 не является нормальным направлением, то процесс переходит на этап S515, на котором в схему 72 привода передается сигнал направления вращения, который означает «реверсное направление» как направление вращения электродвигателя 8, и процесс вывода сигналов для электродвигателя прекращается.
[0129] Когда условия приведения в действие электродвигателя выполняются, и если на этапе S511 определяется, что электродвигатель 8 не следует привести в действие, то процесс переходит на этап S516, и передача управляющего сигнала в схему 72 привода прекращается.
[0130] В дальнейшем, процесс определения нагрузки ускорения и процесс определения движения скручивания, выполняемые в схеме 94 определения ускорения детектора 90 скручивания поясняется со ссылкой на блок-схемы последовательностей операций на фиг. 12, 13A и 13B.
Как показано на фиг. 12 для процесса определения нагрузки ускорения, на этапе S610 определяется, истекло ли время выборки, предварительно заданное для оценки приложения нагрузки к режущему инструменту 4. Другими словами, время ожидания длится до истечения данного времени выборки после предыдущего процесса, выполненного на этапе S620.
[0131] Если на этапе S610 определяется, что время выборки истекло, то процесс переходит на этап S620, на котором определяется, включен ли пусковой переключатель 18a (т.е. введена ли пользователем команда приведения в действие электродвигателя 8).
[0132] Если на этапе S620 определяется, что пусковой переключатель 18a включен, то процесс переходит на этап S630. Ускорения в направлениях по трем осям (X, Y и Z) выбираются из датчика 92 ускорения и подвергаются аналого-цифровому преобразованию на этапе S630, и полученные данные ускорения подвергаются процессу фильтрации для исключения составляющих гравитационного ускорения из данных ускорения, относящихся к направлениям по трем осям, на последующем этапе S640.
[0133] Процесс фильтрации на этапе S640 используется в качестве высокочастотного фильтра (HPF) с граничной частотой приблизительно 1-10 Гц для исключения низкочастотных составляющих, соответствующих гравитационному ускорению.
[0134] После того, как ускорения в направлениях по трем осям подвергаются процессу фильтрации на этапе S640, процесс переходит на этап S650, на котором ускорения в направлениях по трем осям после процесса фильтрации подвергаются цифро-аналоговому преобразованию, и, например, сигналы ускорения в направлениях по трем осям после цифро-аналогового преобразования подвергаются двухполупериодному выпрямлению для получения абсолютных значений соответствующих ускорений [G] в направлениях по трем осям.
[0135] Абсолютные значения, полученные на этапе S650, сглаживаются с использованием низкочастотного фильтра (LPF) для получения соответствующих сглаженных ускорений на следующем этапе S660, и процесс переходит на этап S670.
[0136] На этапе S670, соответствующие сглаженные ускорения сравниваются с порогом, предварительно заданным для определения, нагружен ли режущий инструмент 4, и определяется, продолжилось ли состояние, в котором любое из сглаженных ускорений превышает порог, в течение заданного времени.
[0137] Если на этапе S670 определяется, что состояние, в котором любое из сглаженных ускорений превышает порог, продолжилось в течение заданного времени, то определяется, что режущий инструмент 4 находится в нагруженном состоянии, и процесс переходит на этап S680. Затем, сигнал нагрузки передается в схему 80 управления на этапе S680, и процесс переходит на этап S610.
[0138] Если на этапе S670 определяется, что состояние, в котором любое из сглаженных ускорений превышает порог, не продолжилось в течение заданного времени, или если на этапе S620 определяется, что пусковой переключатель 18a выключен, то процесс переходит на этап S690.
[0139] На этапе S690, в схему 80 управления передается сигнал отсутствия нагрузки, чтобы известить схему 80 управления о том, что режущий инструмент 4 находится в ненагруженном состоянии. Затем процесс переходит на этап S610.
Следовательно, схема 80 управления получает сигнал нагрузки или сигнал отсутствия нагрузки из схемы 94 определения ускорения и поэтому может определять, определяется ли нагруженное состояние (нагрузка ускорения) режущего инструмента 4, или выполняются ли условия мягкого безнагрузочного управления.
[0140] Как показано на фиг. 13A и 13B, в процессе определения движения скручивания, на этапе S710 определяется, истекло ли время выборки, предварительно заданное для определения движения скручивания. Другими словами, время ожидания длится до истечения данного времени выборки после предыдущего процесса, выполненного на этапе S720.
[0141] Затем, если на этапе S710 определяется, что время выборки истекло, то процесс переходит на этап S720, на котором определяется, включен ли пусковой переключатель 18a. Если пусковой переключатель 18a включен, то процесс переходит на этап S730.
[0142] На этапе S730 определяется скручивание ударной дрели 2 в процессе определения движения скручивания, и определяется, имеет ли место в настоящий момент состояние ошибки. Если состояние ошибки имеет место, то процесс переходит на этап S710. Если состояние ошибки не имеет место, то процесс переходит на этап S740.
[0143] На этапе S740, ускорение в направлении оси X выбирается из датчика 92 ускорения посредством аналого-цифрового преобразования. На последующем этапе S750, как на вышеописанном этапе S640, составляющие гравитационного ускорения исключаются из полученных данных ускорения в направлении оси X в процессе фильтрации, действующем в качестве HPF.
[0144] Затем, на этапе S760 вычисляется угловое ускорение [рад/с2] вокруг оси Z по ускорению [G] в направлении оси X с использованием следующего выражения. Затем процесс переходит на этап S770.
Выражение: угловое ускорение=ускорение G×9,8/расстояние L
В приведенном выражении, расстояние L является расстоянием между датчиком 92 ускорения и осью Z.
[0145] На этапе S770, угловое ускорение, полученное на этапе S760, интегрируется по времени выборки. На следующем этапе S780, первоначальный интеграл углового ускорения обновляется. Данный первоначальный интеграл является интегралом углового ускорения по данному прошедшему времени. Поскольку угловое ускорение дополнительно вычислялось на этапе S760, то интеграл углового ускорения, который был взят по времени выборки более, чем заданное время назад, исключается из первоначального интеграла на этапе S780.
[0146] На следующем этапе S790, угловая скорость (или скорость вращения) [рад/с] относительно оси Z вычисляется суммированием первоначального интеграла углового ускорения, обновленного на этапе S780, и самого последнего интеграла углового ускорения, вычисленного на этапе S770.
[0147] На этапе S800, угловая скорость, вычисленная на этапе S790, интегрируется по времени выборки. На следующем этапе S810, первоначальный интеграл угловой скорости обновляется. Данный первоначальный интеграл является интегралом угловой скорости по данному прошедшему времени. Поскольку угловая скорость дополнительно вычислялась на этапе S790, то интеграл угловой скорости, который был взят по времени выборки более, чем заданное время назад, исключается из первоначального интеграла на этапе S810.
[0148] На следующем этапе S820, первый угол поворота [рад] вокруг оси Z, связанной с ударной дрелью 2, вычисляется суммированием первоначального интеграла угловой скорости, обновленного на этапе S810, самого последнего интеграла угловой скорости, вычисленного на этапе S800.
[0149] На этапе S830, по текущей угловой скорости, полученной на этапе S790, вычисляется второй угол поворота ударной дрели 2, необходимый для фактического останова электродвигателя 8 после того, как определяется скручивание ударной дрели 2 вокруг оси Z. После этого процесс переходит на этап S840. Данный угол поворота вычисляется умножением угловой скорости на предварительно заданное расчетное время (угол поворота=угловая скорость × расчетное время).
[0150] На этапе S840, расчетный угол вычисляется прибавлением второго угла поворота, вычисленного на этапе S830, к первому углу поворота вокруг оси Z, вычисленному на этапе S820. Упомянутый расчетный угол соответствует углу поворота вокруг оси Z, включающему в себя угол поворота после прекращения приведения в действие электродвигателя 8 (т.е. второй угол поворота).
[0151] На этапе S850 определяется, продолжалось ли состояние, в котором расчетный угол, вычисленный на этапе S840, превосходит пороговый угол, предварительно заданный для определения движения скручивания, в течение больше, чем заданное время.
[0152] Если результатом на этапе S850 является «да», то процесс переходит на этап S860 для передачи сигнала ошибки в схему 80 управления. Другими словами, факт, что режущий инструмент 4 врезается в обрабатываемую деталь во время сверления обрабатываемой детали, и начинается движение скручивания ударной дрели 2, сообщается схеме 80 управления.
[0153] Следовательно, схема 80 управления определяет, что условия приведения в действие электродвигателя не выполняются, и останавливает приведение в действие электродвигателя 8, что ограничивает в значительной степени скручивания ударной дрели 2. После выполнения процесса на этапе S860, данный процесс возвращается на этап S710.
[0154] Напротив, если результатом на этапе S850 является «нет», то процесс переходит на этап S870 для передачи сигнала отсутствия ошибки в схему 80 управления. Другими словами, в схему 80 управления сообщается факт, что ударная дрель 2 не скручивается. После выполнения процесса на этапе S870, данный процесс возвращается на этап S710.
[0155] На этапе S720, если определяется, что пусковой переключатель 18a не включен, то работа ударной дрели 2 останавливается; следовательно, процесс переходит на этап S880, чтобы обнулить интегралы и первоначальные интегралы углового ускорения и угловой скорости. Затем процесс переходит на этап S870.
[0156] Как описано выше, в ударной дрели 2 в данном варианте осуществления, схема 80 управления в контроллере 70 электродвигателя выполняет процесс определения токовой нагрузки, показанный на фиг. 9, чтобы определить, находится ли режущий инструмент 4 в ненагруженном состоянии или нагруженном состоянии, соответственно току, протекающему через электродвигатель 8 (приложение нагрузки или ее отсутствие определяются по току).
[0157] Поскольку схема 94 определения ускорения детектора 90 скручивания выполняет процесс определения нагрузки ускорения, показанный на фиг. 12, то находится ли режущий инструмент 4 в ненагруженном состоянии или нагруженном состоянии определяется в соответствии с ускорениями, измеренными в направлениях оси X, оси Y и оси Z посредством датчика 92 ускорения (приложение нагрузки или ее отсутствие определяются по ускорениям).
[0158] Когда приложение нагрузки не определяется по току или ускорениям, и пылесборное устройство 66 не закреплено к ударной дрели 2, схема 80 управления ограничивает угловую скорость вращения электродвигателя 8 на уровне или ниже безнагрузочной угловой скорости Nth вращения в процессе мягкого безнагрузочного управления, показанного на фиг. 8.
[0159] Соответственно, в ударной дрели 2 по данному варианту осуществления, если режим привода является ударным режимом, то приложение нагрузки к режущему инструменту 4 может определяться в процессе определения нагрузки ускорения. Если режим привода является режимом сверления, то приложение нагрузки к режущему инструменту 4 может определяться в процессе определения токовой нагрузки. Если режим привода является режимом ударного сверления, то приложение нагрузки к режущему инструменту 4 может определяться как в процессе определения нагрузки ускорения, так и в процессе определения токовой нагрузки.
[0160] Следовательно, в ударной дрели 2 по данному варианту осуществления, в любом режиме привода, выбранном из группы, включающей в себя ударный режим, режим ударного сверления и режим сверления, приложение нагрузки обрабатываемой деталью к режущему инструменту 4 может быть быстро определено, и электродвигатель 8 может быть приведен в действие с заданной угловой скоростью вращения.
[0161] В данном варианте осуществления, процесс определения токовой нагрузки, выполняемый схемой 80 управления выполняет функцию одного примерного токового детектора нагрузки по настоящему изобретению, и процесс определения нагрузки ускорения, выполняемый схемой 94 определения ускорения выполняет функцию одного примерного детектора вибрационной нагрузки по настоящему изобретению.
[0162] В ударной дрели 2 по данному варианту осуществления, схема 94 определения ускорения детектора 90 скручивания выполняет процесс определения движения скручивания, чтобы определять произошло ли скручивание основного корпуса 10 вокруг оси Z (выходного вала) во время вращательного привода режущего инструмента 4.
[0163] Если скручивание основного корпуса 10 вокруг оси Z определяется, то схема 80 управления останавливает приведение в действие электродвигателя 8, что ограничивает в значительной степени скручивания основного корпуса 10.
[0164] Кроме того, в данном варианте осуществления, функция одного примерного детектора скручивания по настоящему изобретению и функция одного примерного детектора вибрационной нагрузки по настоящему изобретению реализуются в схеме 94 определения ускорения детектора 90 скручивания, так что общий датчик 92 ускорения может применяться для определения движения скручивания и определения приложения нагрузки.
[0165] Соответственно, в ударной дрели 2 в данном варианте осуществления не требуется отдельно обеспечивать датчик, предназначенный для измерения перемещения скручивания, и датчик, предназначенный для измерения приложения нагрузки, что исключает необходимость увеличения размера основного корпуса 10 для обеспечения пространства для отдельных датчиков. Кроме того, можно уменьшить число компонентов ударной дрели 2 и, следовательно, стоимость ударной дрели 2.
[0166] В данном варианте осуществления, в процессе определения нагрузки ускорения, который выполняет функцию детектора вибрационной нагрузки, ускорения в направлениях трех осей (X, Y и Z), передаваемые из датчика 92 ускорения, подвергаются аналого-цифровому преобразованию, и полученные данные ускорения подвергаются процессу фильтрации. Посредством данного процесса фильтрации, составляющая гравитационного ускорения исключается из данных ускорения, относящихся к направлению каждой оси.
[0167] Аналогично, в процессе определения движения скручивания, который выполняет функцию детектора скручивания, ускорение в направлении оси X, передаваемое из датчика 92 ускорения, подвергается аналого-цифровому преобразованию, и полученные данные ускорения подвергаются процессу фильтрации. Посредством данного процесса фильтрации, составляющая гравитационного ускорения исключается из данных ускорения, относящихся к направлению оси X.
[0168] Данный процесс фильтрации обеспечивает высокую точность определения ускорения по сравнению с исключением составляющей гравитационного ускорения посредством передачи сигнала измерения из датчика 92 ускорения в аналоговый фильтр (высокочастотный фильтр).
[0169] Точнее, при формировании ускорения вследствие вибрации основного корпуса 10, сигнал измерения из датчика 92 ускорения флуктуирует в зависимости от ускорения, тогда как, когда в ударную дрель 2 не подается электропитания, флуктуация сигнала измерения центрирована относительно потенциала земли.
[0170] Как показано на верхней диаграмме на фиг. 14, когда в ударную дрель 2 подается электропитание, флуктуация сигнала измерения центрирована относительно повышенного напряжения, определяемого добавлением составляющей (Vg) гравитационного ускорения к опорному напряжению входной схемы (обычно, среднему напряжению напряжения источника питания, Vcc: Vcc/2).
[0171] Поскольку электродвигатель 8 является бездействующим сразу после того, как в ударную дрель 2 подается электропитание, то предполагается, что ускорения в основном корпусе 10 не возникает. Соответственно, входной сигнал (сигнал измерения) из датчика 92 ускорения повышается до постоянного напряжения «(Vcc/2)+Vg».
[0172] В данном случае, сигнал измерения вводится в аналоговый фильтр (высокочастотный фильтр: HPF), чтобы исключить составляющие гравитационного ускорения (Vg); следовательно, как показано на среднем чертеже на фиг. 14, выходной сигнал аналогового фильтра быстро повышается сразу после подачи электропитания и превышает опорное напряжение (Vcc/2). Затем, выходной сигнал аналогового фильтра в итоге снижается до опорного напряжения (Vcc/2) и переходит в стабильное состояние, но после некоторого периода времени.
[0173] Напротив, если сигнал измерения подвергается процессу фильтрации с использованием цифрового фильтра, как в данном варианте осуществления, как показано на нижнем чертеже на фиг. 14, то уровень сигнала измерения может устанавливаться в начальное значение сразу после подачи электропитания, что ограничивает или предотвращает флуктуацию сигнала измерения (данных).
[0174] Соответственно, в данном варианте осуществления ускорения могут точно определяться сразу с момента подачи электропитания в ударную дрель 2, что ограничивает ошибки определения приложения нагрузки к режущему инструменту и движения скручивания основного корпуса ударной дрели 2, которые обусловлены ошибками определения ускорения.
[0175] Кроме того, детектор 90 скручивания разделен с контроллером 70 электродвигателя, что дает меньший размер, чем в случае объединения данных компонентов. Соответственно, детектор 90 скручивания можно разместить в положении, в котором он может легко определять динамику (ускорение) основного корпуса 10, с использованием пространства в основном корпусе 10.
[0176] Выше приведено описание варианта осуществления настоящего изобретения, однако настоящее изобретение не ограничено вышеописанным вариантом осуществления, и могут быть созданы различные модификации.
В вышеописанном варианте осуществления детектор 90 скручивания снабжен датчиком 92 ускорения, относящимся к трем осям (осям X, Y и Z). Вместо датчика 92 ускорения можно применить датчик ускорения, относящийся к единственной оси.
[0177] В данном случае, для определения нагруженного состояния и движения скручивания в процессе определения нагрузки ускорения и в процессе определения движения скручивания, датчик ускорения, относящийся к единственной оси, можно использовать для определения, по меньшей мере, ускорения в направлении оси Z и ускорения в направлении оси X.
[0178] Чтобы обеспечивать определение ускорения в направлении оси Z и ускорения в направлении оси X, как показано на фиг. 15A и 15B, детектор 90A скручивания можно закрепить в основном корпусе 10 таким образом, чтобы ось W определения датчика ускорения находилась под косым углом к плоскости, определяемой осью Z (т.е. выходным валом) и осью X, которая ортогональна оси Z. Ось X является осью, вдоль которой датчик ускорения может определять ускорение, вызываемое поворотом основного корпуса 10 вокруг оси Z.
[0179] Если детектор 90A скручивания содержится в основном корпусе 10 приведенным образом, вычисление в схеме 94 определения ускорения может разделять ускорение в направлении оси W определения, которое измеряется датчиком ускорения, на ускорение в направлении оси Z и ускорение в направлении оси X.
[0180] Соответственно, при использовании ускорения в направлении оси Z и ускорения в направлении оси X, полученных вычислением, нагруженное состояние может определяться в процессе определения нагрузки ускорения, и движение скручивания может определяться в процессе определения движения скручивания.
[0181] Фиг. 15A и 15B показывают штриховыми линиями детектор 90A скручивания, включающий в себя датчик ускорения, относящийся к единственной оси. Хотя детектор 90A скручивания установлен под углом, соответствующим направлению оси W определения датчика ускорения на упомянутых фигурах, расположение детектора 90A скручивания можно фактически изменять, как требуется, чтобы направление оси определения датчика ускорения можно было устанавливать вышеописанным образом.
[0182] Несколько функций одного компонента в вышеописанном варианте осуществления могут быть реализованы несколькими компонентами, или одна функция одного компонента может быть реализована несколькими компонентами. Кроме того, несколько функций нескольких компонентов могут быть реализованы одним компонентом, или одна функция, реализуемая несколькими компонентами, может быть реализована одним компонентом. Кроме того, часть конструкции вышеописанного варианта осуществления может отсутствовать. Кроме того, по меньшей мере, часть вышеописанного варианта осуществления может быть дополнена или заменена другой конструкцией вышеописанного варианта осуществления. Следует отметить, что любой режим, содержащийся в технических концепциях, определяемых текстом формулы изобретения, является вариантом осуществления настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОИНСТРУМЕНТ | 2012 |
|
RU2588959C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2015 |
|
RU2676194C2 |
| Штукатурная станция с электроинструментом в качестве силового блока | 2021 |
|
RU2772028C1 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2009 |
|
RU2505390C2 |
| ЭЛЕКТРОИНСТРУМЕНТЫ | 2009 |
|
RU2488478C2 |
| ПЕРЕНОСНОЙ ЭЛЕКТРОИНСТРУМЕНТ | 1998 |
|
RU2146193C1 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2008 |
|
RU2462341C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ С БАТАРЕЙНЫМ ПИТАНИЕМ, ИМЕЮЩИЙ СХЕМУ ЗАЩИТЫ ОТ СВЕРХТОКОВ, И БАТАРЕЙНЫЙ ИСТОЧНИК ПИТАНИЯ ДЛЯ ЭТОГО ИНСТРУМЕНТА | 2006 |
|
RU2374735C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНОЙ ОЧИСТКИ ВОЗДУХА И СОДЕРЖАЩИЙ ЕГО ЭЛЕКТРОИНСТРУМЕНТ | 2018 |
|
RU2759353C2 |
| Электропривод ручного электроинструмента | 1991 |
|
SU1771055A1 |
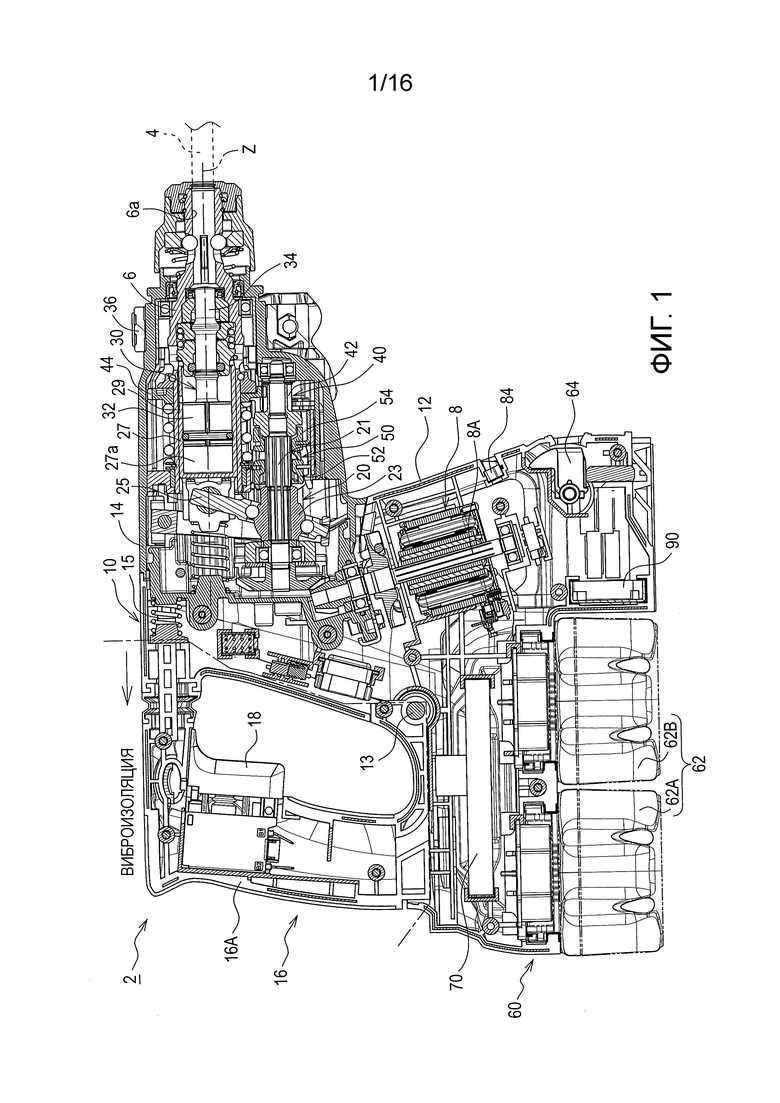
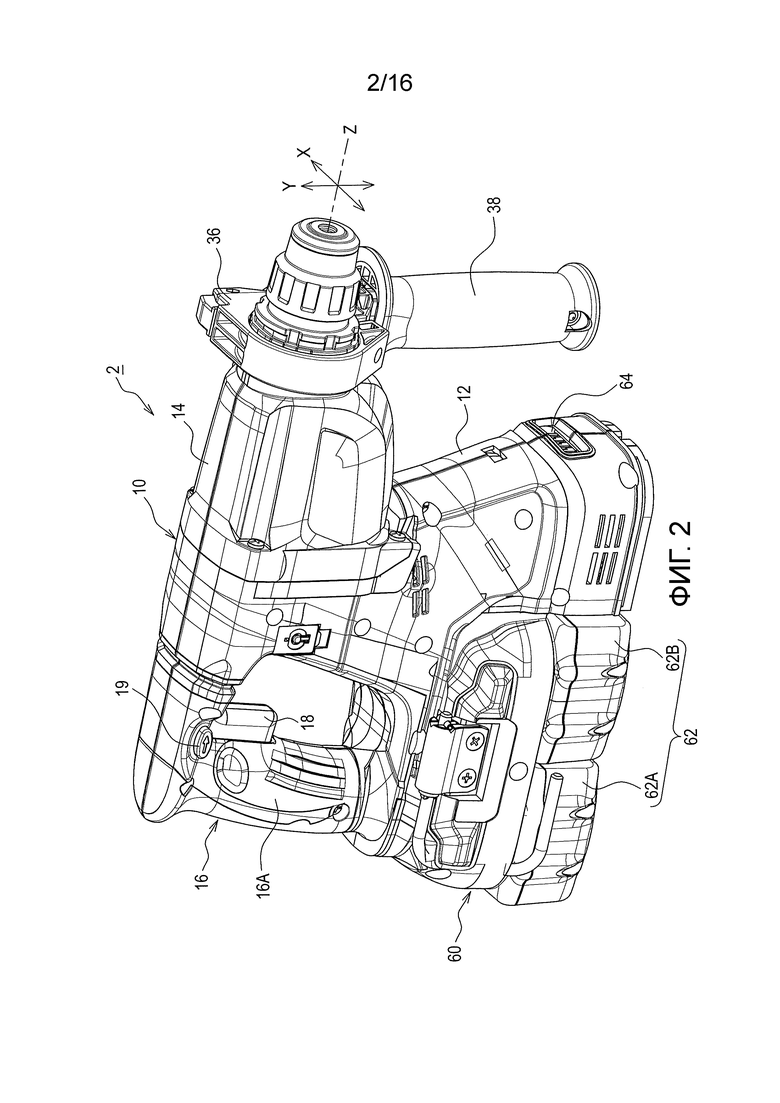
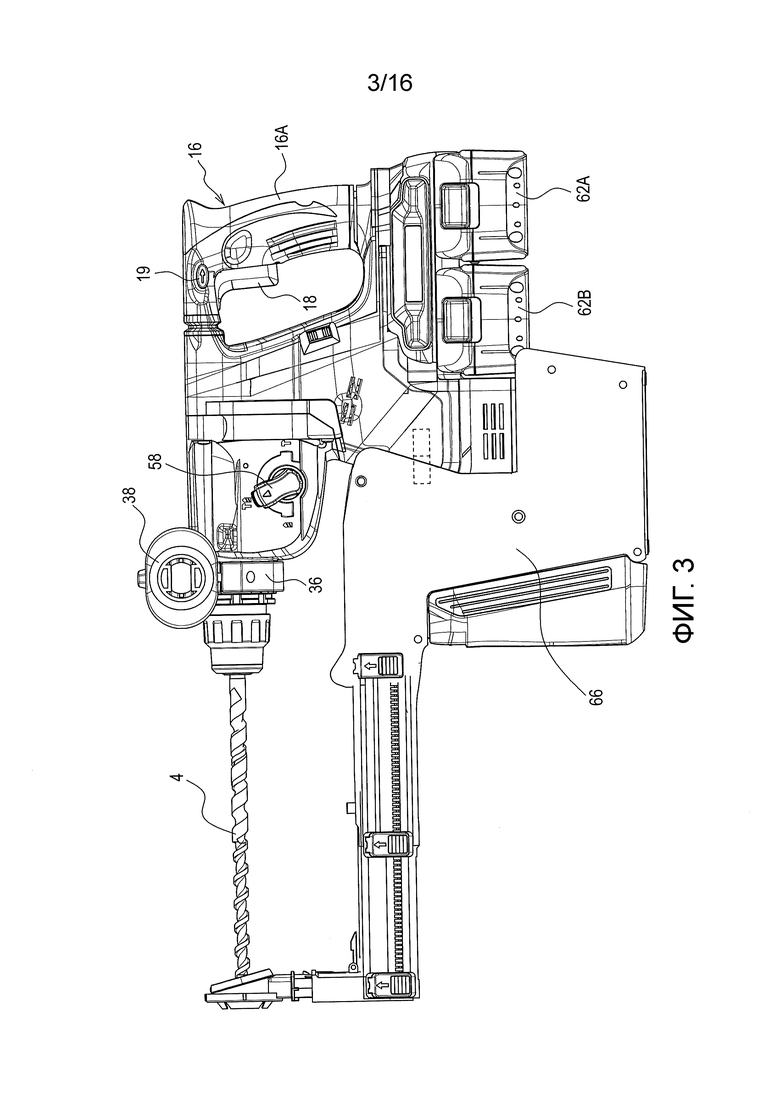
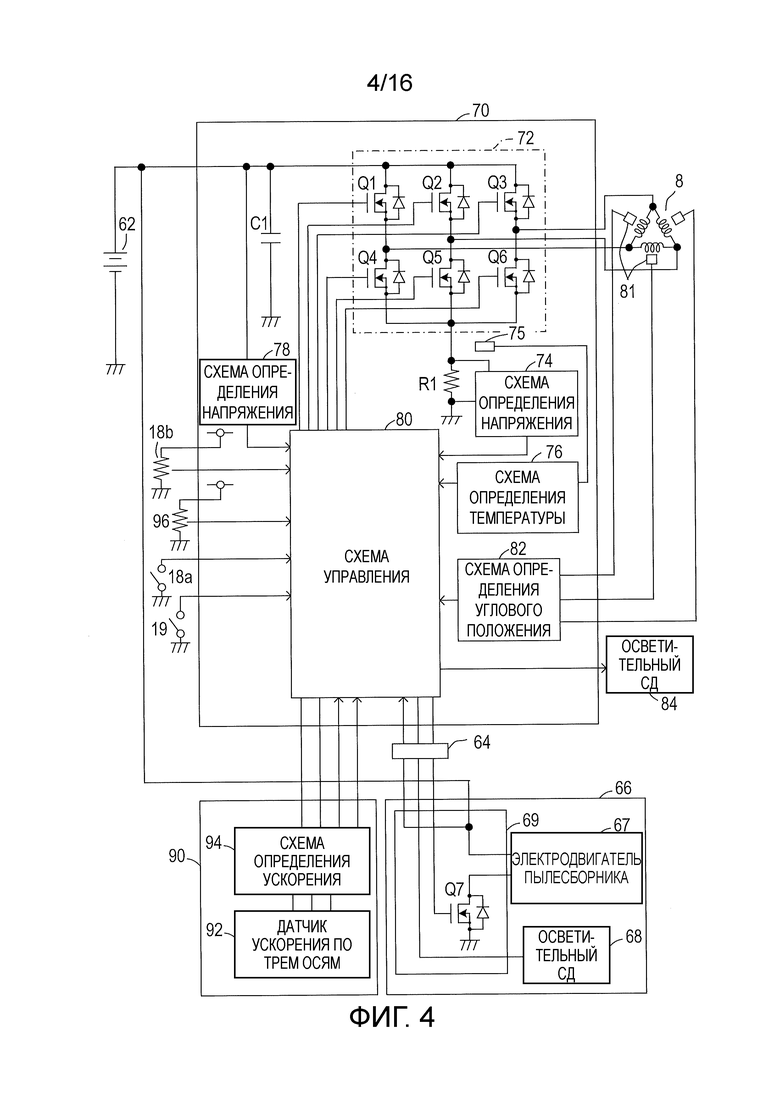
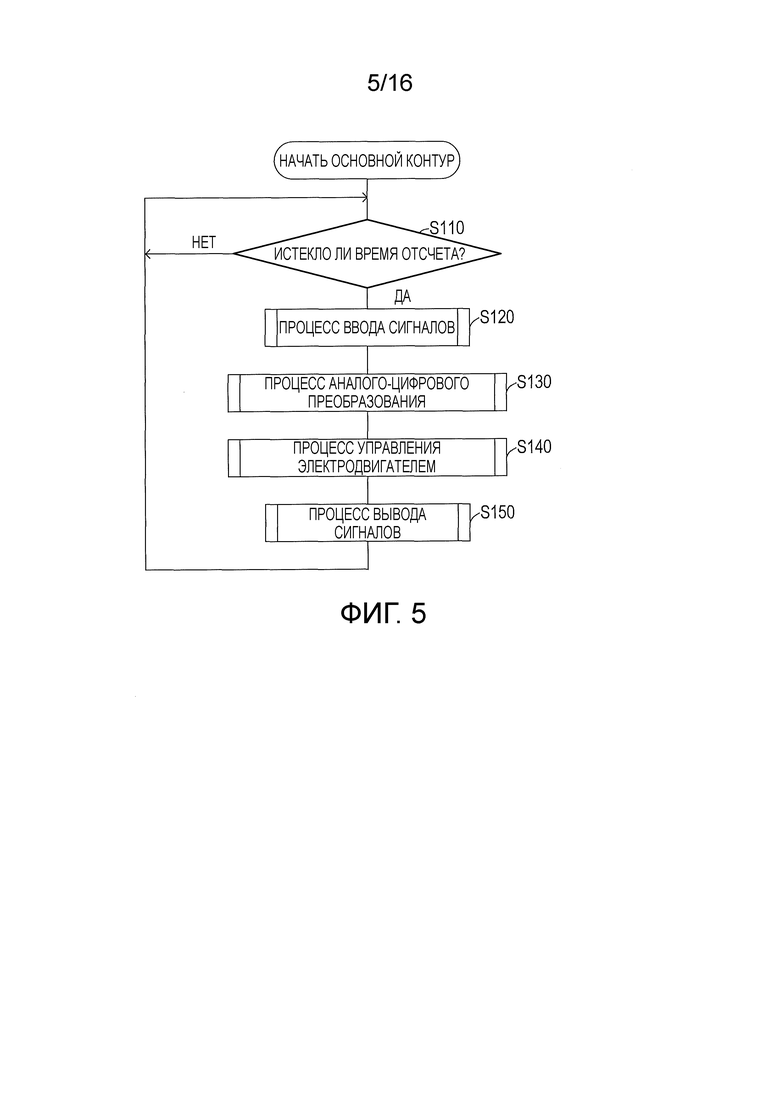
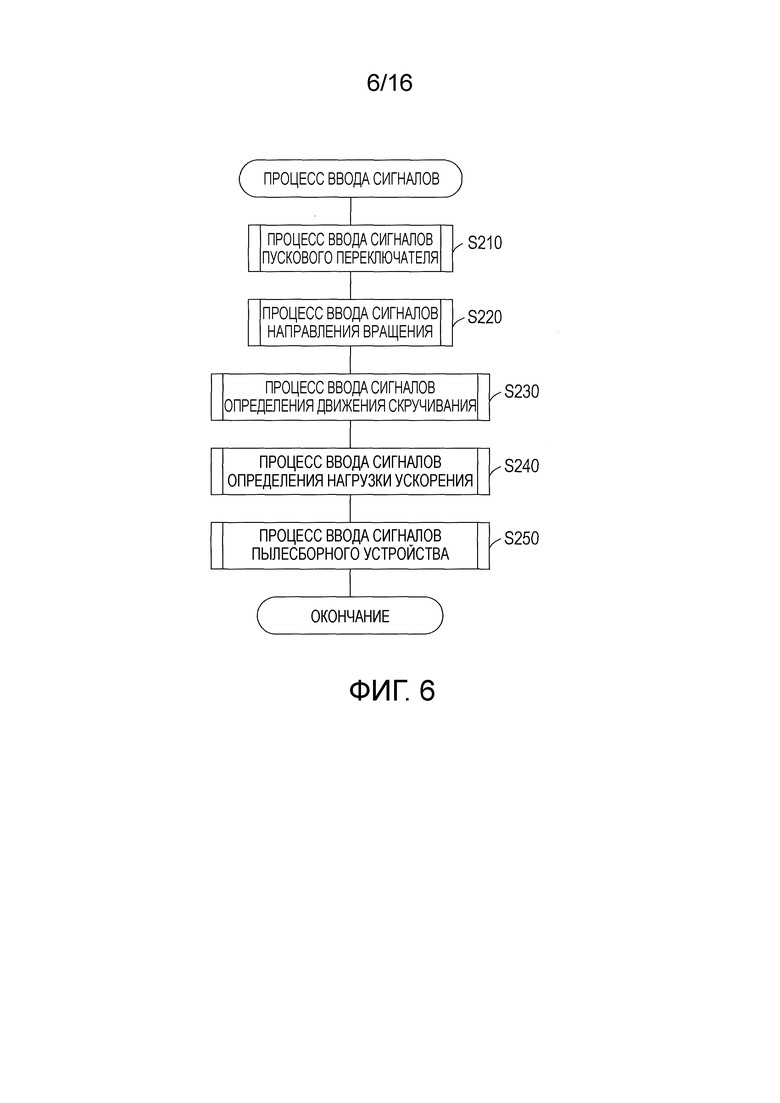
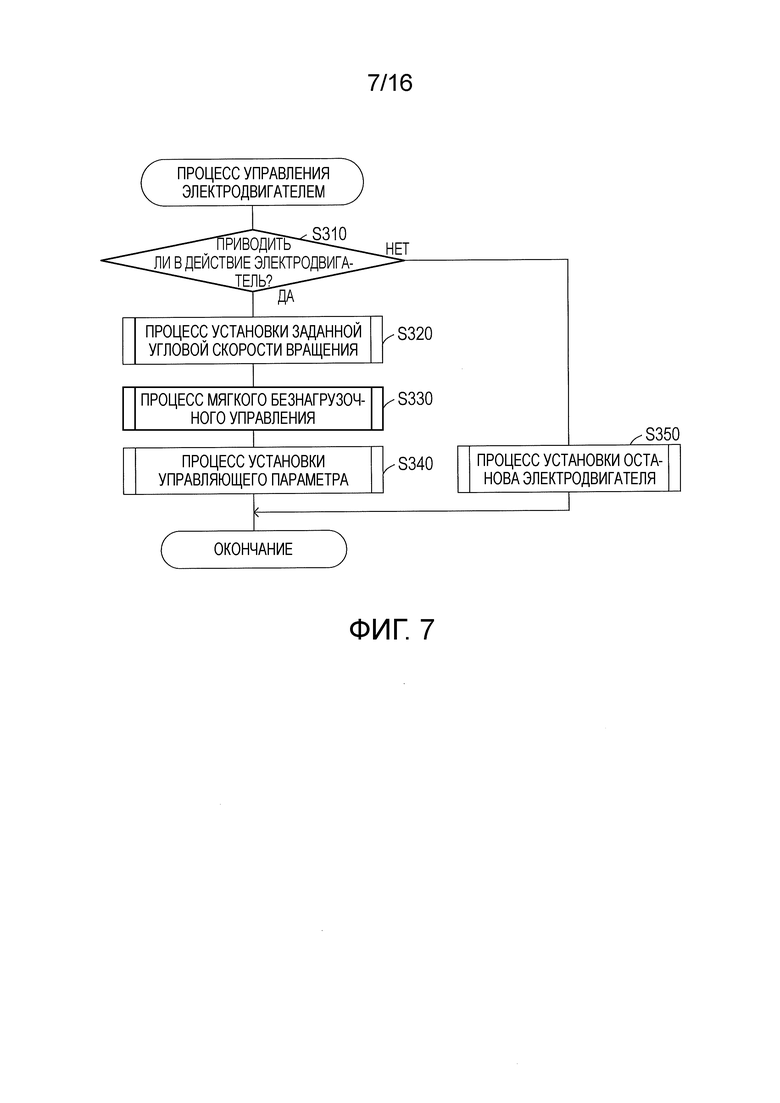
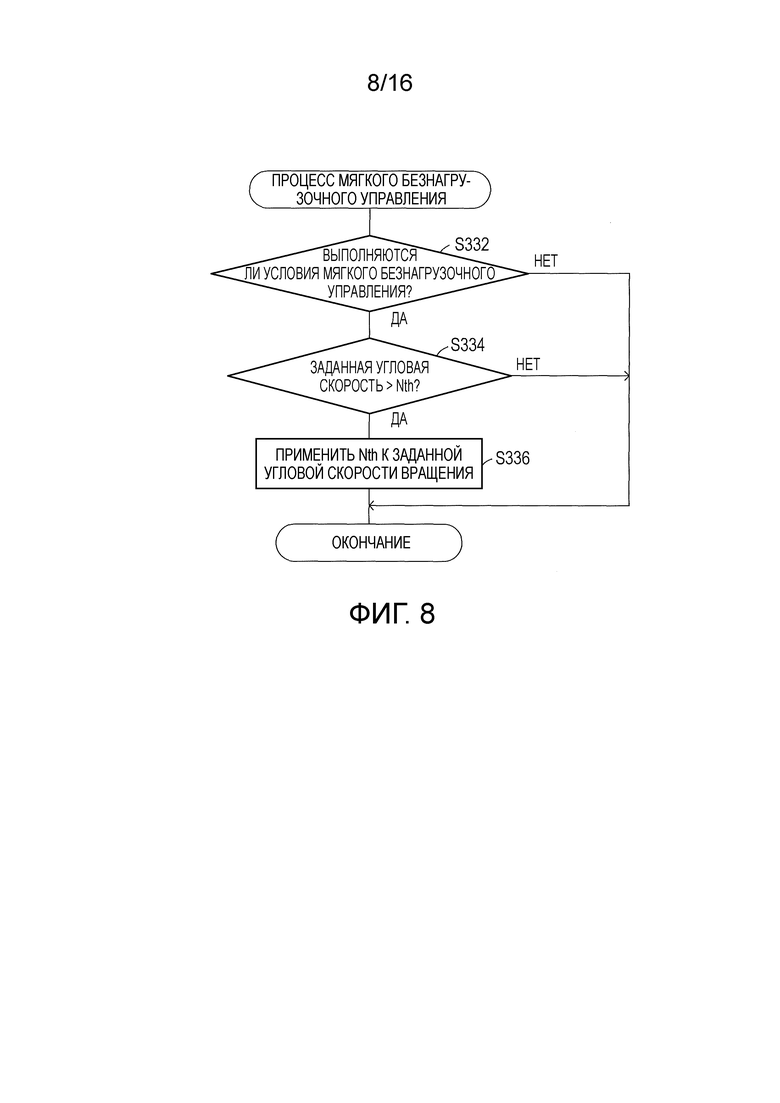
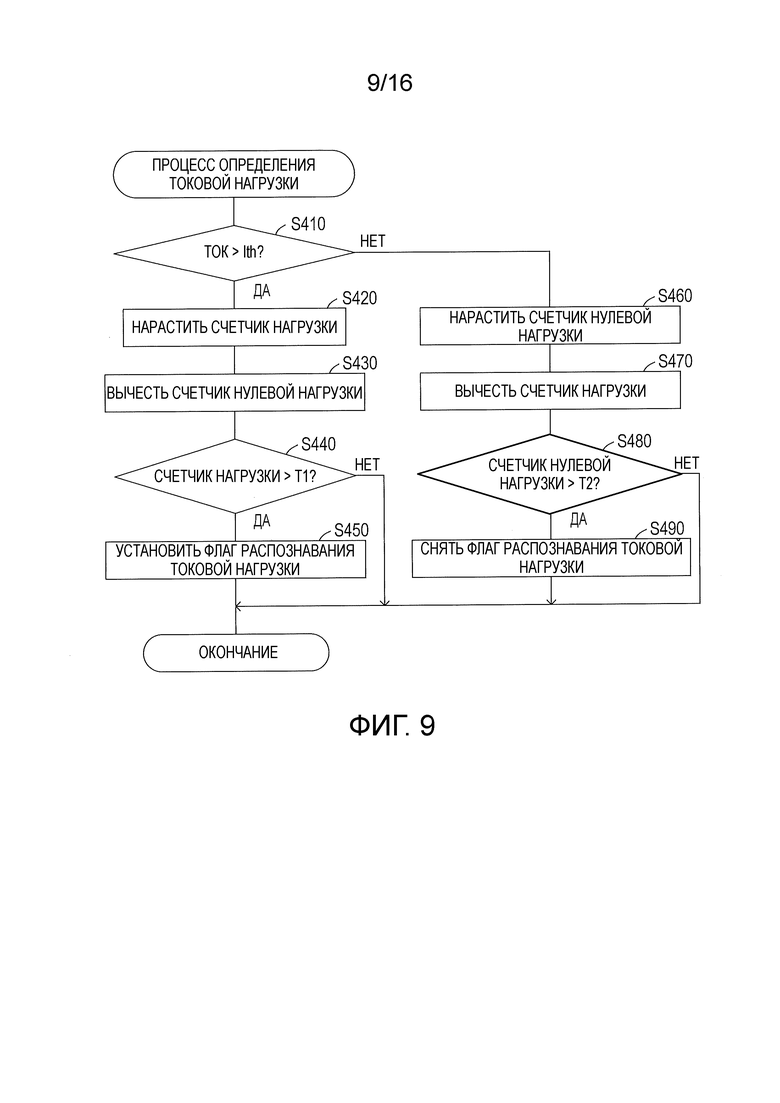
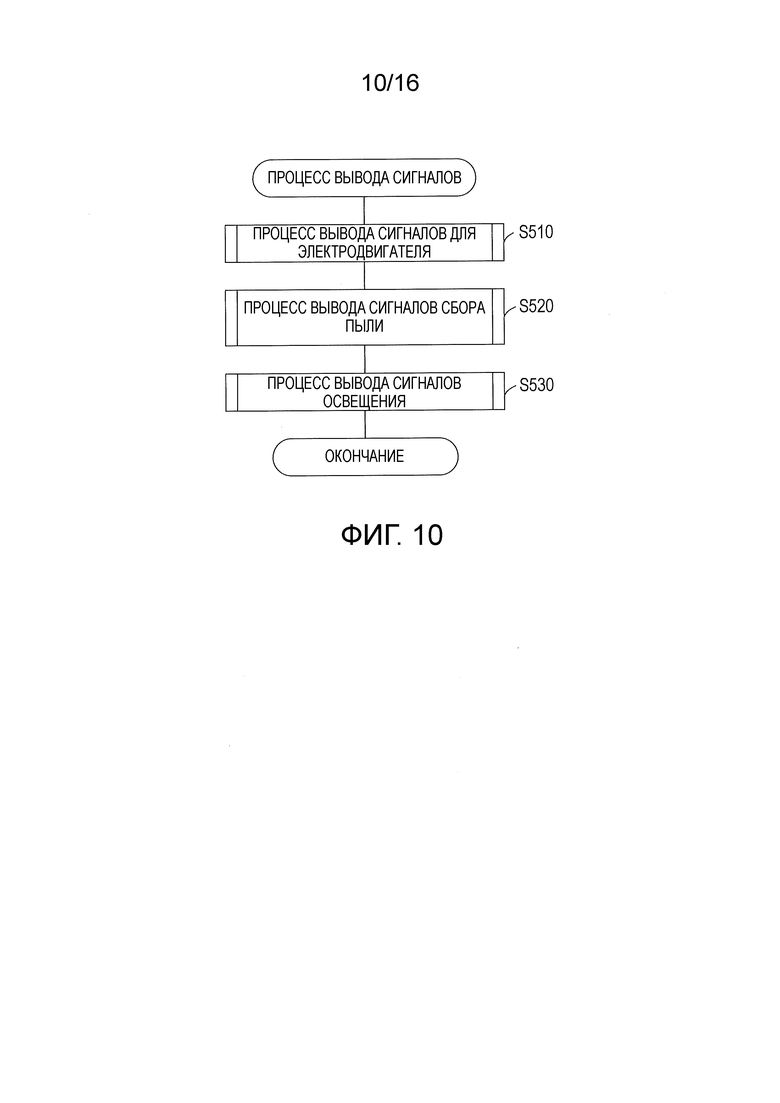
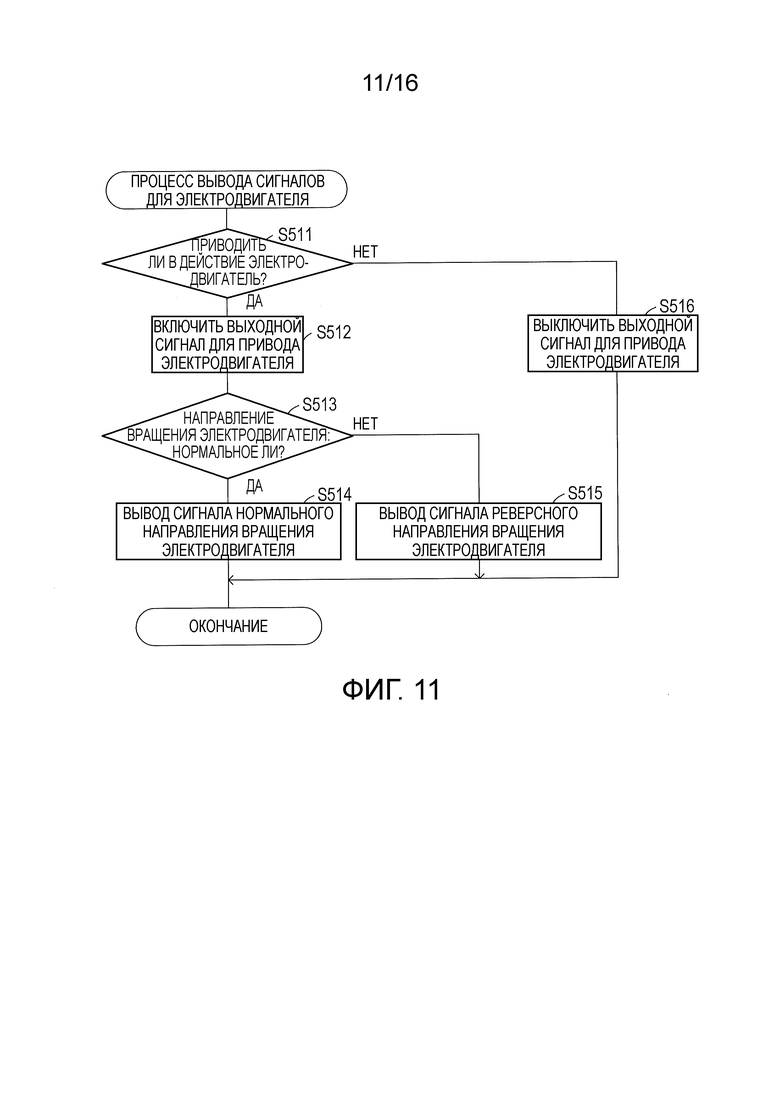
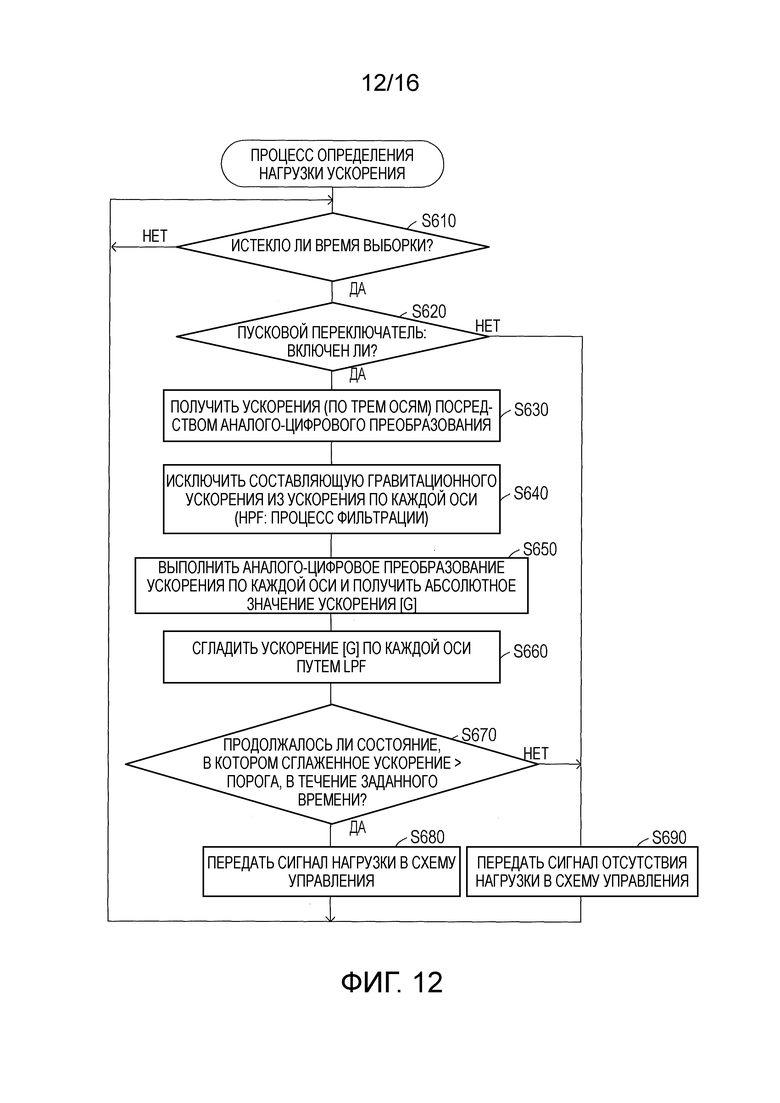
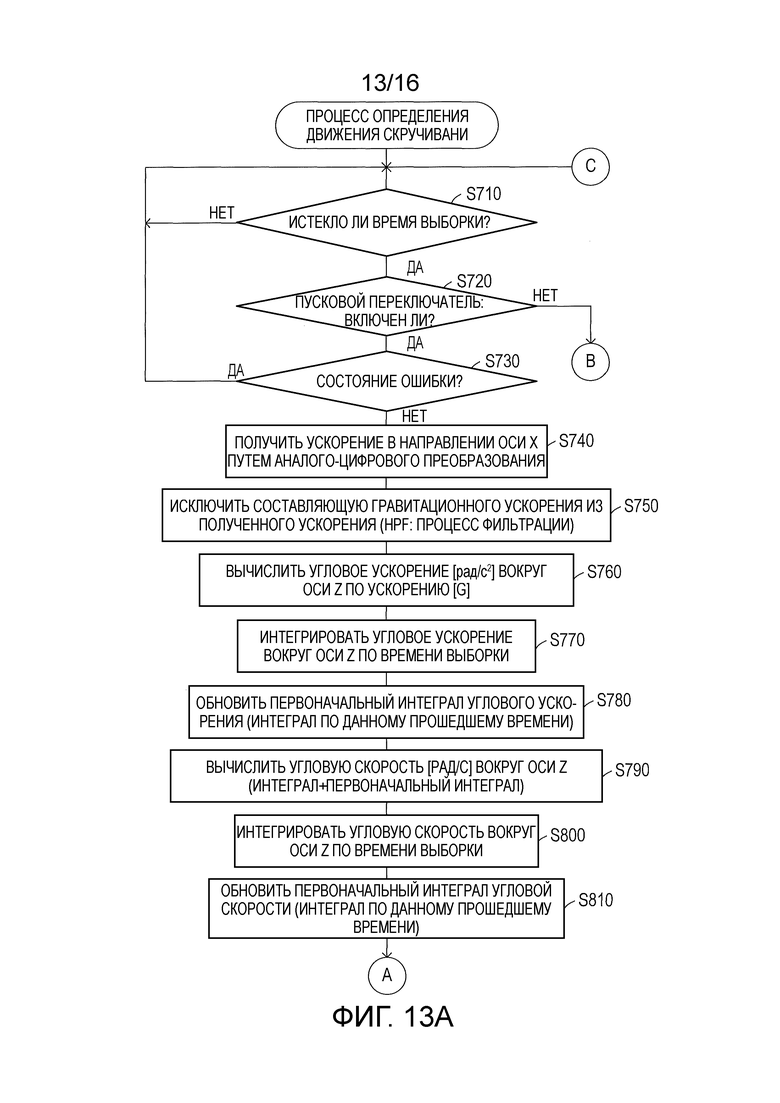
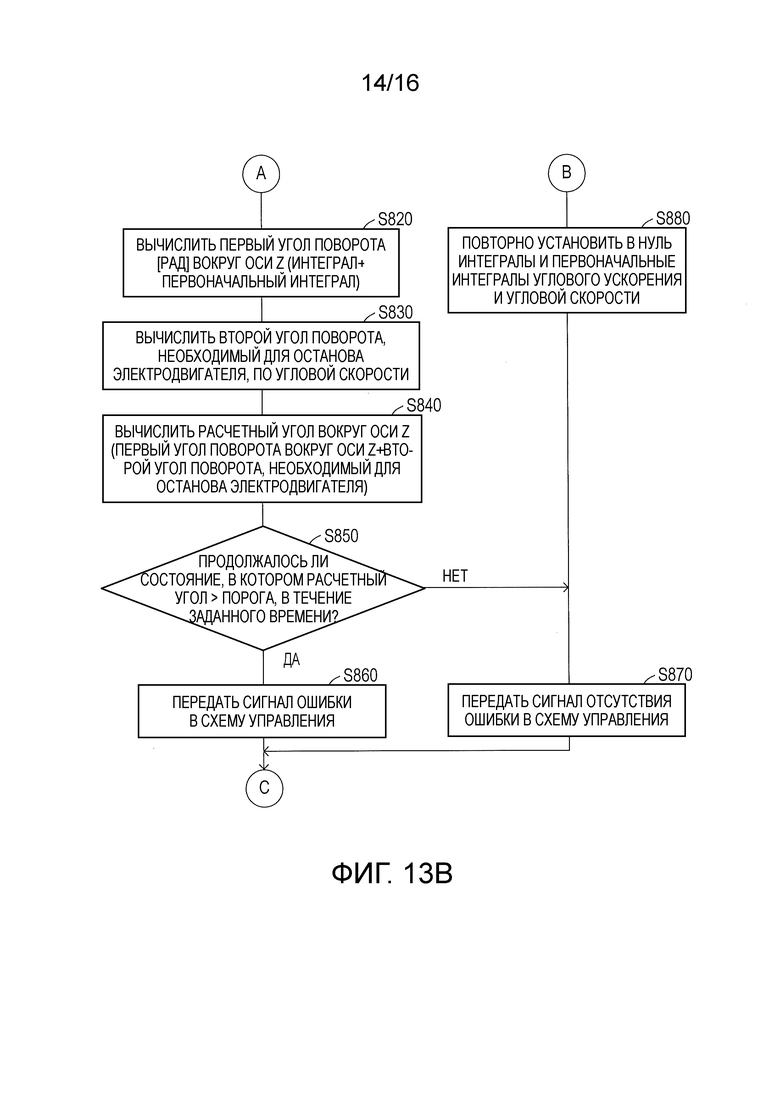
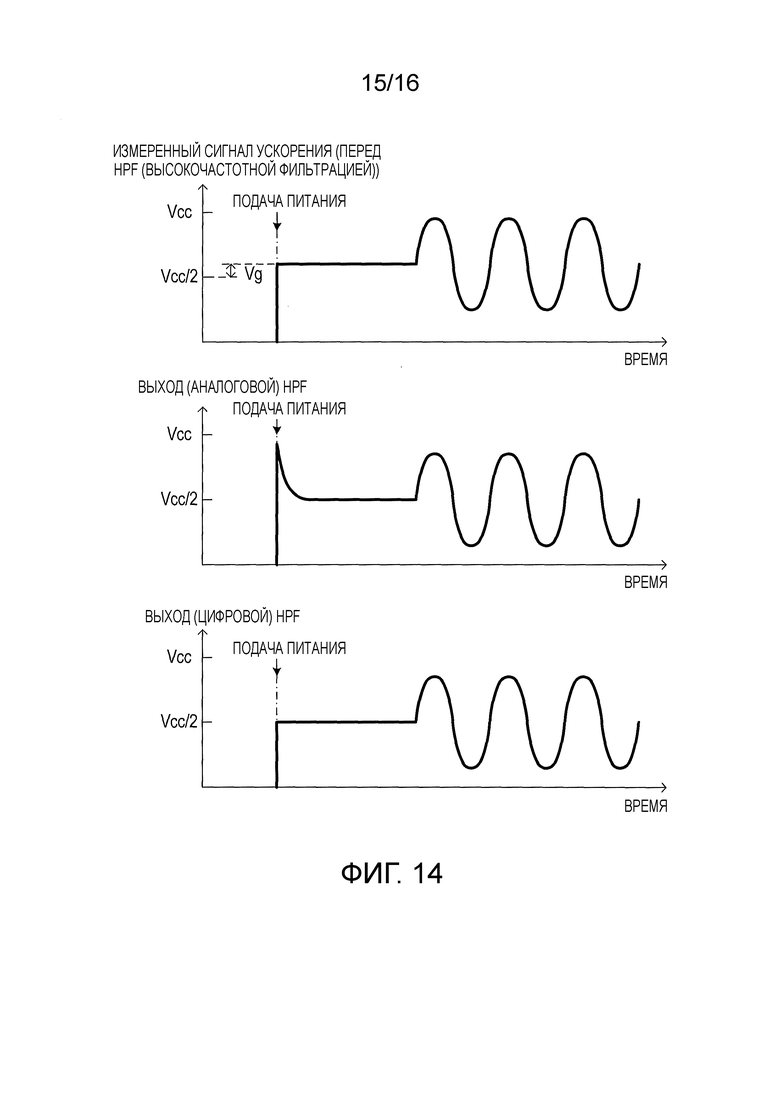
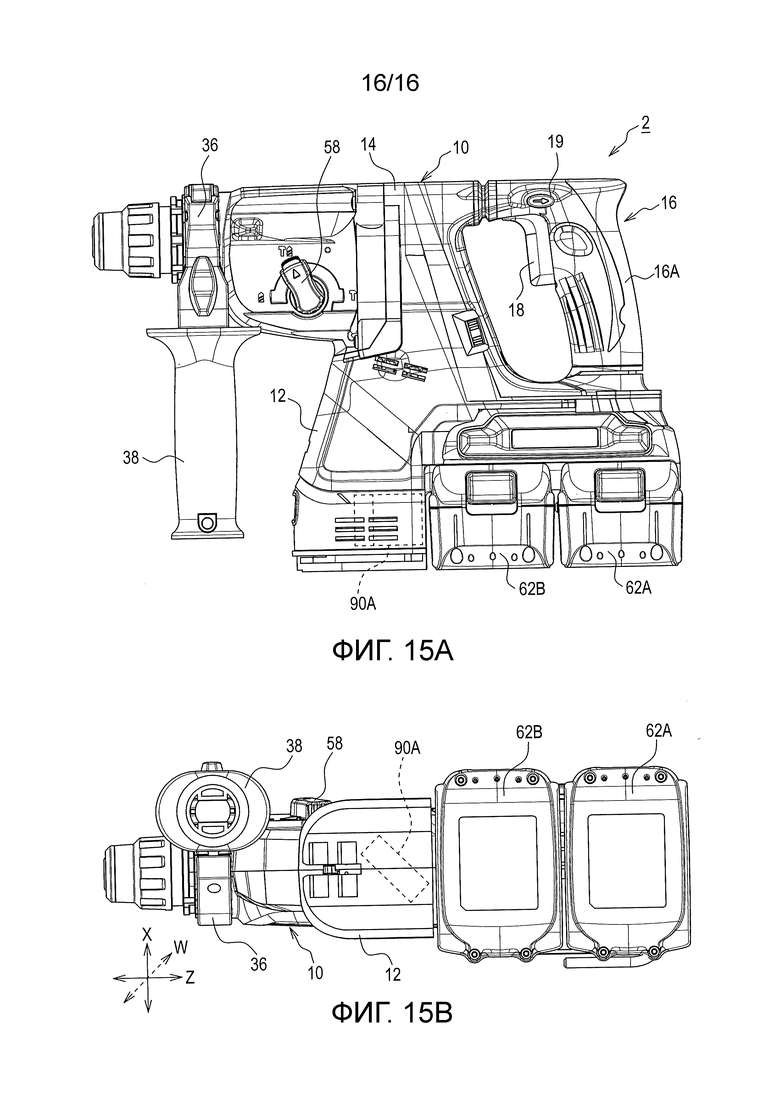
Изобретение относится к электроинструменту. Электроинструмент содержит корпус, электродвигатель, выходной вал, первую механическую передачу, вторую механическую передачу, общий датчик, детектор скручивания и детектор вибрационной нагрузки. Общий датчик измеряет движение корпуса и выдает измеренный сигнал, показывающий измеренное движение. Детектор скручивания определяет движение скручивания корпуса в окружном направлении выходного вала по измеренному сигналу. Детектор вибрационной нагрузки определяет вибрацию корпуса в аксиальном направлении выходного вала по измеренному сигналу и определяет нагрузку на выходной вал по полученной вибрации. В результате определяется скручивание основного корпуса электроинструмента в окружном направлении выходного вала и определяется нагрузка на выходной вал электроинструмента без увеличения размеров корпуса электроинструмента. 3 н. и 15 з.п. ф-лы, 15 ил.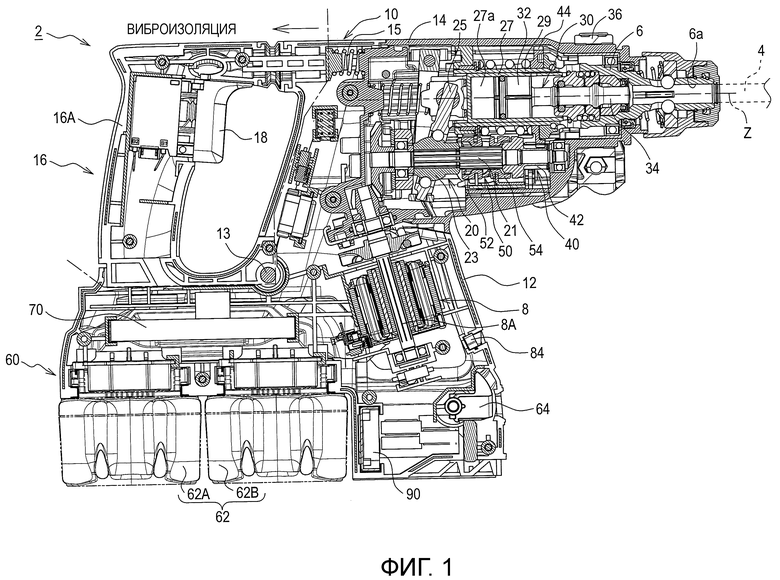
1. Электроинструмент, содержащий:
корпус;
электродвигатель, расположенный в корпусе;
выходной вал, расположенный в корпусе, при этом выходной вал включает в себя первый конец для присоединения режущего инструмента;
первую механическую передачу, которая расположена в корпусе и выполнена с возможностью передачи вращения электродвигателя выходному валу, чтобы вращать выходной вал в окружном направлении выходного вала;
вторую механическую передачу, расположенную в корпусе и выполненную с возможностью передачи вращения электродвигателя выходному валу, чтобы вынуждать выходной вал двигаться возвратно-поступательно в аксиальном направлении выходного вала;
общий датчик, который выполнен с возможностью измерения перемещения корпуса, причем общий датчик дополнительно выполнен с возможностью выдачи сигнала измерения, показывающего измеренное перемещение;
детектор скручивания, выполненный с возможностью определения движения скручивания корпуса в окружном направлении выходного вала по сигналу измерения; и
детектор вибрационной нагрузки, выполненный с возможностью определения вибрации корпуса в аксиальном направлении выходного вала по сигналу измерения, причем детектор вибрационной нагрузки дополнительно выполнен с возможностью определения нагрузки на выходной вал по полученной вибрации,
при этом общий датчик включает в себя датчик ускорения, который выполнен с возможностью измерения ускорения, придаваемого корпусу;
при этом детектор скручивания выполнен с возможностью определения движения скручивания по ускорению в окружном направлении выходного вала, получаемому из датчика ускорения; и
причем детектор вибрационной нагрузки выполнен с возможностью определения нагрузки на выходной вал по ускорению в аксиальном направлении выходного вала, получаемому из датчика ускорения.
2. Электроинструмент по п. 1, дополнительно содержащий первый ограничитель угловой скорости вращения, который выполнен с возможностью установки верхнего предела угловой скорости вращения электродвигателя равным данной угловой скорости вращения в ответ на определение отсутствия нагрузки на выходной вал посредством детектора вибрационной нагрузки.
3. Электроинструмент по п. 1, дополнительно содержащий замедлитель вращения, который выполнен с возможностью замедления вращения электродвигателя в ответ на определение движения скручивания корпуса посредством детектора скручивания.
4. Электроинструмент по п. 1, дополнительно содержащий стопор вращения, который выполнен с возможностью остановки вращения электродвигателя в ответ на определение движения скручивания корпуса посредством детектора скручивания.
5. Электроинструмент по п. 4,
в котором датчик ускорения выполнен с возможностью выдачи сигнала измерения, показывающего ускорение, придаваемое корпусу; и
при этом детектор скручивания выполнен с возможностью получения ускорения по сигналу измерения, с исключением нежелательных низкочастотных составляющих сигнала посредством высокочастотного фильтра.
6. Электроинструмент по п. 5,
в котором высокочастотный фильтр включает в себя цифровой фильтр.
7. Электроинструмент по п. 6,
в котором детектор скручивания выполнен с возможностью повторной установки на нуль полученного ускорения в ответ на остановку вращения электродвигателя.
8. Электроинструмент по п. 1,
в котором датчик ускорения выполнен с возможностью выдачи сигнала измерения, показывающего ускорение, придаваемое корпусу; и
при этом детектор вибрационной нагрузки выполнен с возможностью получения ускорения по сигналу измерения, с исключением нежелательных низкочастотных составляющих сигнала посредством высокочастотного фильтра.
9. Электроинструмент по п. 8,
в котором высокочастотный фильтр включает в себя цифровой фильтр.
10. Электроинструмент по п. 9,
в котором детектор вибрационной нагрузки выполнен с возможностью повторной установки на нуль полученного ускорения в ответ на остановку вращения электродвигателя.
11. Электроинструмент по п. 1,
в котором датчик ускорения выполнен с возможностью измерения первого ускорения вдоль первой оси определения и второго ускорения вдоль второй оси определения.
12. Электроинструмент по п. 1,
в котором датчик ускорения выполнен с возможностью измерения ускорения вдоль единственной оси определения;
при этом датчик ускорения расположен в корпусе таким образом, что единственная ось определения ориентирована наклонно относительно плоскости, которая задается осью вдоль выходного вала и ортогональной осью, которая ортогональна выходному валу.
13. Электроинструмент по п. 12,
в котором ортогональная ось является осью, вдоль которой датчик ускорения измеряет ускорение в окружном направлении выходного вала.
14. Электроинструмент по п. 1, дополнительно содержащий токовый детектор нагрузки, который выполнен с возможностью определения нагрузки на выходной вал по току, протекающему через электродвигатель.
15. Электроинструмент по п. 14, дополнительно содержащий второй ограничитель угловой скорости вращения, который выполнен с возможностью установки верхнего предела угловой скорости вращения электродвигателя равным данной угловой скорости вращения в ответ на определение отсутствия нагрузки на выходной вал посредством как токового детектора нагрузки, так и детектора вибрационной нагрузки.
16. Электроинструмент по п. 1, дополнительно содержащий контроллер электродвигателя, который помещается в корпусе и выполнен с возможностью управления приведением электродвигателя в действие согласно команде извне электроинструмента.
17. Электроинструмент, содержащий:
корпус;
электродвигатель, расположенный в корпусе;
выходной вал, расположенный в корпусе, при этом выходной вал включает в себя первый конец для присоединения режущего инструмента;
первую механическую передачу, расположенную в корпусе и выполненную с возможностью передачи вращения электродвигателя выходному валу, чтобы вращать выходной вал в окружном направлении выходного вала;
вторую механическую передачу, расположенную в корпусе и выполненную с возможностью передачи вращения электродвигателя выходному валу, чтобы вынуждать выходной вал двигаться возвратно-поступательно в аксиальном направлении выходного вала;
датчик, выполненный с возможностью измерения перемещения корпуса, причем датчик дополнительно выполнен с возможностью выдачи сигнала измерения, показывающего измеренное перемещение;
детектор скручивания, выполненный с возможностью определения движения скручивания корпуса в окружном направлении выходного вала по сигналу измерения; и
детектор вибрационной нагрузки, выполненный с возможностью определения вибрации корпуса в аксиальном направлении выходного вала по сигналу измерения, причем детектор вибрационной нагрузки дополнительно выполнен с возможностью определения нагрузки на выходной вал по полученной вибрации.
18. Способ определения движения скручивания корпуса электроинструмента и определения нагрузки на выходной вал электроинструмента,
при этом способ содержит следующие этапы, на которых:
определяют движение скручивания корпуса в окружном направлении выходного вала по сигналу измерения, выданному из датчика, причем датчик располагается в корпусе, датчик выполнен с возможностью измерения перемещения корпуса, и датчик дополнительно выполнен с возможностью выдачи сигнала измерения, показывающего измеренное перемещение; и
определяют вибрацию корпуса в аксиальном направлении выходного вала по сигналу измерения; и
определяют нагрузку на выходной вал по полученной вибрации.
| СПОСОБ ПОЛУЧЕНИЯ ЗАВАРНЫХ ПРЯНИКОВ | 2012 |
|
RU2500143C1 |
| ВСЕСОЮЗНАЯ | 0 |
|
SU373406A1 |
| RU 2014102889 A, 10.08.2015 | |||
| US 2015231771 A1, 20.08.2015. | |||

