Изобретение относится к технике воздушных, а именно несущих винтов для вертолета, и может быть использовано на пассажирских, десантно-транспортных и военных вертолетах.
Известные несущие винты для вертолетов выполнены в виде многолопастного осесимметричного устройства. Каждая лопасть несущего винта выполнена в виде плоскопараллельной или плоскопрофильной полосы, установленной под определенным углом к плоскости вращения, что позволяет рабочей поверхности перемещать массу воздуха от передней кромки к задней, обеспечивая при этом получение реактивной силы, направленной суммарно от всех лопастей вдоль оси вращения винта вверх от земли, и таким образом создавать подъемную силу, обеспечивающую вертикальный подъем, например, двухлопастного вертолета АН-1, "Хью Кобра" [1] или отечественного вертолета МИ-24 [2].
Недостатком известных несущих винтов вертолетов [1] и [2] является то, что при вращении винта не используется энергия от центробежной силы, так как при работе винта воздух не только смещается наклонными рабочими поверхностями лопастей вдоль оси вращения винта, обеспечивая его несущую способность, но и за счет центробежной силы значительная часть воздушной массы из под лопастей винта устремляется в радиальном направлении вдоль лопастей и срывается с их концевых гребней в окружающее воздушное пространство, перенося в него всю кинетическую энергию, полученную при радиальном движении большой массы воздуха вдоль лопастей, снижая тем самым и кпд работы винта.
Наиболее близким техническим решением, выбранным в качестве прототипа, является несущий винт вертолета [3]. Все лопасти несущего винта прототипа выполнены с загнутыми на угол от 90 до 135° концевыми гребнями. При этом концевая кромка отогнутых гребней выступает относительно рабочих поверхностей лопастей на величину от 0,5 до 3,5% от диаметра винта. Такое техническое решение позволяет суммировать поток воздуха, перемещаемый центробежной силой, с потоком воздуха, перемещаемого наклонными рабочими поверхностями лопастей и направить их в одном направлении, увеличивая тем самым тяговые свойства несущего винта.
Недостатком прототипа является то, что угол загиба концевого гребня каждой лопасти винта выполнен статично, то есть загнут строго на определенный угол при изготовлении винта. Однако такое техническое решение снижает возможности маневра изменением угла концевого гребня и тем самым лишает возможности несущий винт получить форсированную дополнительную тягу, например в критической ситуации.
Задача, на решение которой направлено изобретение, состоит в создании условий получения форсированной тяги без увеличения частоты вращения несущего винта.
Это достигается тем, что в несущем винте вертолета, выполненном в виде сбалансированных и совмещенных на одной оси одним из двух своих концов нескольких плоскопрофильных пластинчатых лопастей, имеющих по диаметру винта концевые гребни, загнутые в сторону рабочих поверхностей лопастей, с рабочей поверхностью и концевой кромкой, согласно изобретению концевые гребни всех лопастей выполнены подвижными с возможностью плавного изменения угла от 180 до 60° между рабочими поверхностями лопастей и рабочими поверхностями концевых гребней и фиксации заданного угла, при этом минимальная высота концевой кромки каждого гребня относительно рабочей поверхности каждой лопасти составляет 0,1% от диаметра винта. При этом подвижность концевых гребней обеспечена с помощью петлевых шарнирных соединений. Привод концевых гребней выполнен с помощью цепных тяг или гибких валов, размещенных в полостях лопастей. Кроме того, при выполнении привода концевых гребней в виде гибких валов он осуществлен от одного управляющего вала, размещенного коаксиально в приводном валу винта.
Шарнирно-петлевое соединение характеризует конкретную механическую связь между элементами, а именно между лопастью и концевым гребнем, которая может быть выполнена по известному конструктивному типу петлевых створок [4], когда одна створка жестко соединена с концевым гребнем, а вторая створка жестко соединена с лопастью винта. Створка, соединенная с концевым гребнем, имеет проходящий через петли, жестко закрепленный в них стержень, на котором в середине петли жестко установлено коническое зубчатое колесо, соединенное зубчатым соединением со вторым зубчатым колесом, жестко закрепленном на гибком валу, размещенном в полости лопасти. На вторых концах гибких валов, размещенных в каждой лопасти, также жестко установлены конические зубчатые колеса, соединенные зубчатым соединением с приводным коническим зубчатым колесом, размещенным на управляющем валу коаксиально с приводным валом винта.
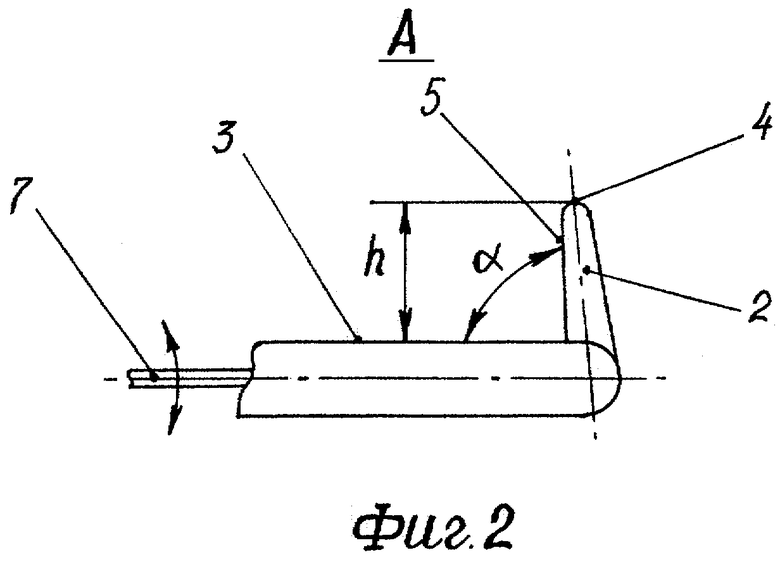
Сущность изобретения поясняется чертежами, где на фиг.1 изображен вид четырехлопастного винта сверху, с вырывами лопастей. На фиг.2 изображен вид участка одной лопасти винта с концевым гребнем по стрелке А.
Устройство несущего винта выполнено из четырех плоскопрофильных лопастей 1, имеющих по диаметру винта концевые гребни 2, загнутые в сторону рабочих поверхностей 3 лопастей 1. Каждый концевой гребень 2 имеет концевую кромку 4 и рабочую поверхность 5. Концевая кромка 4 каждого гребня 2 находится относительно рабочей поверхности лопасти 1 на расстоянии h, минимальная величина которого составляет 0,1% от диаметра винта D. Каждая лопасть 1 соединена со своим концевым гребнем 4 подвижно, с помощью петлевого шарнира 6. Отклонение рабочей поверхности 5 каждого концевого гребня 2 относительно рабочей поверхности 3 на угол α у каждой лопасти осуществляется с помощью валов 7, размещенных в полостях лопастей 1.
Устройство работает следующим образом.
Несущий винт диаметром D при вращении в воздухе обеспечивает перемещение большой массы воздуха к земле, создавая реактивную силу, которая удерживает либо поднимает вертолет. Перемещение воздуха к земле осуществляется с помощью рабочих поверхностей 3 лопастей 1. При этом при быстром вращении винта омывающий его лопасти воздух получает большую величину центробежной силы, которая направлена радиально, вдоль рабочих поверхностей 3 лопастей 1. Значительная масса воздуха, перемещенная центробежной силой вдоль рабочих поверхностей 3 лопастей 1, доходит до гребней 2, изменяет свое направление движения на угол α и подмешивается к основному потоку воздуха, перемещаемого наклонными рабочими поверхностями 3. При этом управление величиной потока воздуха, перемещаемого центробежной силой и подмешиваемого к основному потоку, осуществляется с помощью отклонения концевых гребней 2 на определенный угол α с последующей механической фиксацией выбранного значения угла. А резко изменяя угол α, можно обеспечивать форсированный режим тяги, не увеличивая при этом частоту вращения винта и значит обеспечивая маневр с минимальными энергозатратами.
Обоснование диапазона (от 180 до 60°) возможного отклонения концевых гребней 2 лопастей 1 объясняется следующим. При отклонении концевого гребня 2, а следовательно, и его рабочей поверхности 5 на 180° относительно рабочей поверхности 3 своей лопасти, последняя становится подобной лопастям аналогов [1] или [2], то есть устройством лопасти, в которой отогнутый концевой гребень в сторону рабочей поверхности лопасти вообще отсутствует. А это позволяет центробежной силе сбрасывать часть энергоемкого потока воздуха за пределы диаметра винта, не выполнив при этом полезной работы. При отклонении концевого гребня 2 на 60° относительно рабочей поверхности 3 своей лопасти необходимо потому, что концы быстровращающихся лопастей вертолета выгибаются, и тем больше, чем больше масса вертолета. А поскольку при этом и рабочая поверхность 3 лопастей 1 становится выпуклой, то, чтобы обеспечить эффективное использование центробежной силы для изменения направления потока воздуха вниз, вдоль вертикальной оси и суммирование его к основному потоку, получаемому от рабочих поверхностей 3 лопастей 1, этот угол берется не 90°, как у прототипа, а на 33% меньше. Минимальная высота h концевой кромки 4, равная 0,1% от диаметра D винта, позволяет до минимума снизить аэродинамическое сопротивление винту.
Источники информации
1. Журнал "Моделист-конструктор" №7, 2001, стр.24.
2. То же.
3. Патент России №2229422, М. кл. В 64 С 27/32, 27/46, 11/16, опубл. 27.05.2004 г.
4. Д.Д.Чурабо. Детали и узлы приборов. Конструирование и расчет. Справочное пособие. Изд. 4-е, перераб. и доп. М., "Машиностроение", 1975 (стр.459-463).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕБНОЙ ВИНТ КОНСТРУКЦИИ ЗЕМЛЯКОВА Н.В. | 2005 |
|
RU2279992C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2001 |
|
RU2229422C2 |
| ГРЕБНОЙ ВИНТ ДЛЯ НАДВОДНОГО И ПОДВОДНОГО ТРАНСПОРТА | 2001 |
|
RU2222470C2 |
| ВОЗДУШНЫЙ ВИНТ САМОЛЕТА | 2001 |
|
RU2204503C2 |
| ПРОПЕЛЛЕРНАЯ МЕШАЛКА КОНСТРУКЦИИ ЗЕМЛЯКОВА Н.В. ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКИХ СРЕД | 2003 |
|
RU2253506C1 |
| ГРЕБНОЙ ВИНТ С НАПРАВЛЯЮЩЕЙ НАСАДКОЙ КОНСТРУКЦИИ ЗЕМЛЯКОВА | 2006 |
|
RU2301761C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| Гребной винт в кольцевой насадке | 2022 |
|
RU2774200C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2012 |
|
RU2506202C1 |
| Гребной винт Гермова | 2017 |
|
RU2684337C2 |
Изобретение относится к технике воздушных, а именно несущих винтов для вертолета. Несущий винт выполнен из плоскопрофильных лопастей, имеющих по диаметру винта концевые гребни. Концевые гребни всех лопастей выполнены подвижными, с возможностью плавного изменения угла от 180 до 60° между рабочими поверхностями лопастей и их концевых гребней, с обеспечением фиксации заданного угла. Минимальная высота торцевой кромки каждого гребня относительно рабочей поверхности каждой лопасти составляет 0,1% от диаметра винта. Подвижность концевых гребней осуществлена с помощью петлевых шарнирных соединений. Привод петлевых шарнирных соединений выполнен с помощью цепных тяг или гибких валов, размещенных в полостях лопастей. Техническим результатом заявленного изобретения является создание условий получения форсированной тяги без увеличения частоты вращения несущего винта. 3 з.п. ф-лы, 2 ил.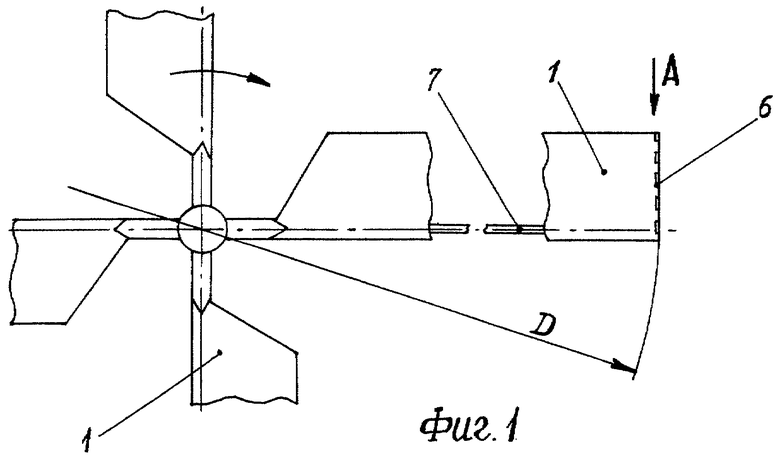
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2001 |
|
RU2229422C2 |
| ВОЗДУШНЫЙ ВИНТ САМОЛЕТА | 2001 |
|
RU2204503C2 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ ЛОПАСТЕЙ | 1996 |
|
RU2171207C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 2007 |
|
RU2364496C1 |

