Изобретение относится к машиностроению и может быть использовано в транспортном машиностроении и станкостроении.
Известна инерционная передача, содержащая установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, размещенные по разные стороны от радиальных осей конические зубчатые центральные колеса, закрепленные на соосных ведущем и ведомом валах, конические зубчатые сателлиты, введенные в зацепление с центральными колесами и образующие с последними пары колес, имеющие разные по величине передаточные отношения, и маховики, установленные на радиальных осях водила. Передача снабжена жестко соединенным с корпусом передачи опорным коническим центральным колесом, установленными на радиальных осях водила сателлитами, жестко соединенными с маховиками и введенными в зацепление с опорным колесом, и установленными на осях водила по разные стороны от оси передачи сблокированными по два сателлитами, внутренними и внешними относительно оси передачи, введенными порознь в зацепление с разными центральными колесами, при этом блоки сателлитов и сателлиты с маховиками размещены с возможностью независимого друг от друга вращения вокруг радиальных осей водила (патент Российской Федерации N 2072715, МПК F 16 H 33/10, 3/74, 1997 г.).
Недостатками этой инерционной передачи являются вращение ведущего и ведомого валов в противоположных направлениях, невозможность передачи вращающего момента при максимальной частоте вращения ведомого вала и при неподвижном водиле, а также отсутствие возможности торможения ведомого вала и рабочей машины при помощи двигателя.
Наиболее близким по совокупности признаков техническим решением к заявленному изобретению является инерционная передача, содержащая корпус, соосные ведущий и ведомый валы, закрепленные на последних ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены сателлиты с маховиками. Передача снабжена жестко соединенным с корпусом опорным зубчатым колесом, введенным в зацепление с сателлитами, несущими маховики, и сблокированными по два сателлитами, внутренними и внешними относительно оси передачи, для зацепления с разными центральными коническими зубчатыми колесами и составляющими с ними пары конических колес, имеющих разные по величине передаточные отношения, ведущие и ведомые конические зубчатые колеса размещены по одну сторону от радиальных осей водила, а блоки сателлитов и сателлиты с маховиками размещены на радиальных осях водила с возможностью независимо друг от друга вращения.
Ведущие и ведомые валы указанной инерционной передачи связаны механизмом свободного хода, ведущая обойма которого связана с ведомым валом, а ведомая - с ведущим валом (патент Российской Федерации N 2072716, МПК F 16 H 33/10, 3/74, 1997 г.).
Недостатком указанной инерционной передачи является невозможность передачи вращающего момента при неподвижном водиле, когда ведомый вал вращается с наибольшей частотой, что сужает диапазон автоматического регулирования величины передаваемого вращающего момента и уменьшает КПД передачи.
Предлагаемое изобретение обеспечивает достижение технического результата, который заключается в повышении КПД и обеспечении возможности передачи вращающего момента на ведомый вал при любой частоте его вращения в интервале от нулевой до максимальной, а также при неподвижном водиле. При этом обеспечивается автоматическое и бесступенчатое изменение в широких пределах величины передаваемого вращающего момента в зависимости от нагрузки на ведомом валу, осуществляется возможность торможения ведомого вала и рабочей машины при помощи двигателя, например, при движении транспортной машины под уклон, а также обеспечивается возможность пуска двигателя внутреннего сгорания путем буксировки машины. Предложенная передача позволяет передавать максимальный по величине момент силы на неподвижный ведомый вал в связи с приложенной к нему нагрузкой без прекращения при этом работы двигателя.
Все это в совокупности обеспечивает более экономное расходование моторного топлива и при этом уменьшает вредное экологическое воздействие на окружающую среду применяемых двигателей внутреннего сгорания. Одновременно с этим упрощается управление транспортной машиной. Предложенная передача сопоставима с известными коробками передач по простоте устройства, габаритным размерам и массе. Благодаря постоянному зацеплению применяемых зубчатых колес она подвержена меньшему износу, более долговечна и надежна в работе.
Указанный технический результат достигается тем, что в автоматической бесступенчатой инерционной передаче, содержащей корпус, соосные ведущий и ведомый валы, закрепленные на последних ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены сблокированные по два сателлиты, внутренние и внешние относительно оси передачи, находящиеся в зацеплении с разными центральными коническими зубчатыми колесами, ведущее и ведомое центральные конические зубчатые колеса размещены по одну сторону от радиальных осей водила, на радиальных осях водила установлены соосно сблокированные с маховиками сателлиты, находящиеся в зацеплении с центральным коническим зубчатым опорным колесом, а блоки сателлитов и сателлиты с маховиками размещены на радиальных осях водила с возможностью независимого друг от друга вращения. Согласно изобретению центральное коническое зубчатое опорное колесо установлено соосно относительно оси передачи и коаксиально к ведущему валу с возможностью вращения и имеет опору для передачи и трансформирования момента силы при взаимодействии с корпусом инерционной передачи посредством установленного в корпусе параллельно оси передачи опорного вала, на котором закреплено два зубчатых колеса, одно из которых находится в зацеплении с зубчатым колесом, закрепленном на ведущем валу, а другое колесо - с зубчатым колесом, жестко соосно связанным с центральным коническим зубчатым опорным колесом при помощи полого промежуточного вала с обеспечением вращения этого опорного колеса в направлении вращения ведущего вала.
Каждый сателлит, находящийся в зацеплении с центральным коническим зубчатым опорным колесом, и маховик выполнены как единая деталь в виде массивного сателлита.
Сблокированные по два внутренние и внешние относительно оси передачи сателлиты, находящиеся в зацеплении с разными центральными коническими зубчатыми колесами, составляют с ними пары конических колес, имеющих разные по величине передаточные отношения.
Сблокированные по два внутренние и внешние относительно оси передачи сателлиты, находящиеся в зацеплении с разными центральными коническими зубчатыми колесами, составляют с ними пары конических колес, имеющих равные по величине передаточные отношения.
Закрепленные на опорном валу зубчатые колеса, находящиеся в зацеплении с колесами, одно из которых закреплено на ведущем валу, а второе жестко соосно связано с центральным коническим зубчатым опорным колесом, составляют с ними пары колес, имеющих разные по величине передаточные отношения.
Закрепленные на опорном валу зубчатые колеса, находящиеся в зацеплении с колесами, одна из которых закреплено на ведущем валу, а второе жестко соосно связано с центральным коническим зубчатым опорным колесом, составляют с ними пары колес, имеющих равные по величине передаточные отношения.
Ведущий и ведомый валы связаны механизмом свободного хода, ведущая обойма которого установлена на ведомом валу, а ведомая обойма - на ведущем валу.
На чертеже дан общий вид автоматической бесступенчатой инерционной передачи с показом всех ее элементов и отличительных признаков, характеризующих изобретение.
Автоматическая бесступенчатая инерционная передача содержит соосные ведущий 1 и ведомый 2 валы, на которых закреплены соответственно ведущее 3 и ведомое 4 центральные конические зубчатые колеса. На ведущем валу 1 установлено с возможностью вращения относительно этого вала и оси передачи О-О водило с радиальными осями 5, на которых с возможностью вращения относительно оси O1-O1 водила установлены сблокированные по два сателлиты, внутренние 6 и внешние 7 относительно оси O-O передачи. Внутренний сателлит 6 находится в зацеплении с ведущим центральным коническим зубчатым колесом 3, а внешний сателлит 7 - с ведомым центральным коническим зубчатым колесом 4. Указанные сателлиты 6, 7 и находящиеся с ними в зацеплении ведущее 3 и ведомое 4 центральные колеса образуют пары, которые могут иметь разные по величине или одинаковые передаточные отношения, что зависит от заданных параметров инерционной передачи по величине передаваемого вращающего момента и частоте вращения ведомого вала 2. Указанные ведущее 3 и ведомое 4 центральные колеса размещены по одну сторону от радиальных осей 5 водила, совмещенных с осью O1-O1 водила. На радиальных осях 5 водила установлены с возможностью вращения относительно оси O1-O1 водила сблокированные с маховиками 8 сателлиты 9. При этом сблокированные внутренние 6 и внешние 7 сателлиты и сблокированные с маховиками 8 сателлиты 9 размещены на радиальных осях 5 водила с возможностью независимого друг от друга вращения. Размещенные на осях водила и сблокированные с маховиками сателлиты 9 находятся в зацеплении с центральным коническим зубчатым опорным колесом 10, которое размещено соосно относительно оси O-O передачи на полом промежуточном валу 11 коаксиально к ведущему валу 1 с возможностью вращения. Указанное опорное колесо 10 имеет опору для передачи момента силы на корпус 12 инерционной передачи посредством установленного в корпусе 12 параллельно оси O-O передачи опорного вала 13, на котором закреплено два зубчатых цилиндрических колеса 14, 15, одно из которых 14 находится в зацеплении с зубчатым колесом 16, закрепленном на ведущем валу 1, а другое колесо 15 - с зубчатым колесом 17, закрепленном на полом промежуточном валу 11, на другом конце которого закреплено центральное коническое опорное колесо 10. При этом обеспечивается вращение указанного опорного колеса 10 в одном направлении с ведущим валом 1.
Как вариант устройства каждый сателлит 9, размещенный на оси 5 водила и находящийся в зацеплении с центральным коническим зубчатым опорным колесом 10, и маховик 8 выполнены как единая деталь в виде массивного сателлита.
Закрепленные на опорном валу 13 зубчатые колеса 14, 15 и находящиеся с ними в зацеплении колеса 16, 17, закрепленные соответственно на ведущем валу 1 и промежуточном валу 11, образуют пары колес, которые могут иметь разные или одинаковые по величине передаточные отношения, что зависит от заданных параметром по частоте вращения опорного колеса 10 и зависимых от этого массы маховиков 8 и величины передаваемого на ведомый вал 2 вращающего момента.
Ведущий 1 и ведомый 2 валы связаны механизмом свободного хода 18, ведущая обойма которого установлена на ведомом валу 2, а ведомая обойма - на ведущем валу 1.
Ось O1-O1 радиальных осей 5 водила размещена перпендикулярно оси O-O инерционной передачи и эти оси пересекаются в центральной точке O1.
Автоматическая бесступенчатая инерционная передача работает следующим образом.
При вращении ведущего вала 1 с ведущим центральным колесом 3 и неподвижном ведомом вале 2 в связи с приложенной к нему нагрузкой или началом вращения из неподвижного положения блоки сателлитов 6, 7 вращаются на радиальных осях 5 водила вокруг оси O1-O1 водила, поскольку внутренние сателлиты 6 находятся в зацеплении с вращающимся ведущим центральным колесом 3, а вращающиеся вокруг оси O1-O1 водила внешние сателлиты 7 перекатываются по неподвижному ведомому центральному колесу 4, вовлекая водило с радиальными осями 5 во вращение вокруг оси O-O передачи в направлении, противоположном направлению вращения ведущего вала 1. Вместе с водилом вращаются вокруг оси O-O передачи установленные на радиальных осях 5 водила маховики 8 со сблокированными с ними сателлитами 9, которые находятся в зацеплении с центральным опорным колесом 10. При этом сателлиты 9 и сблокированные с ними маховики 8 вращаются вокруг оси O1-O1 водила. Одновременное вращение маховиков 8 и сателлитов 9 вокруг двух пересекающихся осей - оси O-O передачи и оси O1-O1 водила - равнозначно вращению их относительно центральной точки O1 пересечения этих осей. Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением фундаментального всеобщего закона сохранения, согласно которому момент количества движения может быть изменен только под воздействием моментов внешних сил. Известно также, что момент количества движения при вращении тела вокруг точки является векторной величиной. При вращении водила вектор момента количества движения маховиков и сателлитов (в последующем будут упоминаться в основном маховики 8) изменяет свое направление. Проявление при этом закона сохранения противодействует вращению водила с его радиальными осями 5 вокруг оси O-O передачи, которое стремится сохранить свое стабильное положение. В связи с этим водило и его радиальные оси 5 играют роль опоры для передачи вращения и вращающего момента при помощи блока сателлитов 6, 7 от ведущего колеса 3 на ведомое колесо 4. При этом внешней опорой для торможения вращения водила и обеспечения передачи и преобразования вращающего момента является корпус 12 инерционной передачи, в котором установлен опорный вал 13, связанный через посредство пары зубчатых колес 15, 17 и полого промежуточного вала 11 с центральным опорным колесом 10, обеспечивающим вращение сблокированных сателлитов 9 и маховиков 8 вокруг оси O1-O1 водила и в конечном итоге относительно центральной точки O1. Величина тормозящего момента на водиле зависит от массы сблокированных маховиков 8 и сателлитов 9 и от частоты их одновременного вращения вокруг оси O-O передачи и оси O1-O1 радиальных осей 5 водила, т.е. в конечном итоге - от частоты вращения относительно центральной точки O1. В свою очередь частота указанных вращений маховиков 8 и сателлитов 9 зависит от частоты вращения ведущего вала 1 и передаточных пар колес 14, 16 и 15, 17, обеспечивающих силовое взаимодействие центрального опорного колеса 10 с корпусом 12 инерционной передачи через опорный вал 13. Благодаря указанным связям центральное опорное колесо 10 находится в постоянном вращении и обеспечивает при этом передачу вращающего момента и возможность его трансформирования в связи с наличием внешней опоры на корпус 12 инерционной передачи. Постоянное вращение центрального опорного колеса 10 обеспечивает вращение сблокированных маховиков и сателлитов при любом режиме работы передачи, в том числе при неподвижном водиле. В связи с этим водило и его радиальные оси 5 оказывают постоянное противодействие их вращению вокруг оси O-O передачи, в том числе и из их неподвижного положения. Этим обеспечивается возможность передачи вращения и вращающего момента от ведущего вала 1 на ведомый вал 2 при любом режиме работы инерционной передачи, в том числе при неподвижном водиле с его радиальными осями 5, а также при максимально возможной (т.е. предельной) частоте вращения ведомого вала 2.
Помимо указанных выше условий частота вращения ведомого вала 2 и величина передаваемого на него вращающего момента зависит от передаточных отношений двух пар колес, включающих пару ведущее колесо 3 - внутренний сателлит 6 и пару внешний сателлит 7 - ведомое колесо 4. При этом передача вращения и вращающего момента осуществляется в связи с наличием тормозящего момента, приложенного к водилу указанным выше порядком.
Автоматическое изменение частоты вращения ведомого вала 2 и величины передаваемого на него вращающего момента обеспечивается возможностью независимого друг от друга вращения на радиальных осях водила 5 блоков сателлитов 6, 7 и маховиков 8 вместе со сблокированными с ними сателлитами 9.
Максимальный по величине вращающий момент передается на неподвижный (заторможенный нагрузкой) ведомый вал 2, поскольку благодаря перекатыванию внешнего сателлита 7 по неподвижному ведомому колесу 2 водило и его радиальные оси 5 вовлекаются во вращение с максимальной частотой в направлении, противоположном направлению вращения центрального опорного колеса 10. При этом маховики 8 с сателлитами 9 имеют максимальную частоту вращения вокруг оси O-O передач, оси O1-O1 водила и относительно центральной точки O1, что обеспечивает создание наибольшего по величине момента количества движения и наиболее интенсивное изменение направления вектора момента количества движения относительно центральной точки O1. Известно, что действия над векторами являются отражением соответствующих действий над векторными величинами (см. , например, "Политехнический словарь" под редакцией академика А.Ю. Ишлинского, издание второе, изд. "Советская энциклопедия", М. -1980, стр. 73/1). Известно также свойство гироскопа устойчиво сохранять направление оси вращения. В связи с этим при указанных выше условиях максимальной величины моментов количества движения маховиков 8 и наибольшей интенсивности изменения направления векторов их моментов количества движения относительно центральной точки O1, при неподвижном ведомом вале 2 обеспечивается передача на него максимального по величине вращающего момента.
С началом вращения ведомого вала 2 частота вращения маховиков 8 с сателлитами 9 относительно осей O-O, O1-O1 и центральной точки O1 уменьшается, что приводит к соответствующему уменьшению величины момента количества движения маховиков и сателлитов 9 и интенсивности изменения направления его вектора, а следовательно, к уменьшению величины вращающего момента, передаваемого на ведомый вал 2.
Ведомый вал вращается с максимальной частотой при неподвижном водиле с его радиальными осями 5. Однако при этом маховики 8 и сблокированные с ними сателлиты 9 вращаются вокруг оси O1-O1 водила, поскольку сателлиты 9 находятся в зацеплении с вращающимся центральным опорным колесом 10. Передача вращающего момента на ведомый вал при этом происходит за счет устойчивости радиальных осей водила, несущих вращающиеся маховики 8 и сателлиты 9, аналогично устойчивости направления оси гироскопа.
Помимо указанных выше условий, постоянные соотношения по частотам вращения ведущего 1 и ведомого 2 валов и по величине передаваемого вращающего момента от одного вала на другой зависят от величины передаточных отношений всех указанных выше находящихся в зацеплении пар колес.
При необходимости передачи вращающего момента и вращении от ведомого вала 2 на ведущий вал 1 с целью торможения рабочей машины или пуска двигателя путем буксировки машины работа двигателя прекращается. При этом под воздействием вращающего момента со стороны вращающегося ведомого вала происходит замыкание механизма свободного хода 18, который обеспечивает передачу потока мощности от вращающегося ведомого вала 2 на ведущий вал 1 и далее на двигатель, который оказывает сопротивление вращению его вала при неработающем режиме. Это же обеспечивает пуск двигателя при буксировке рабочей машины, что может иметь значение при неисправном стартере, разряженных аккумуляторах и в зимних условиях при охлажденном двигателе.
Следовательно, предложенная инерционная передача обеспечивает автоматическое изменение величины передаваемого вращающего момента и частоты вращения в зависимости от нагрузки на ведомом валу, при этом указанные изменения происходят плавно в связи с непрерывным вращением маховиков 8 и сателлитов 9. Автоматизм работы облегчает управление рабочей машиной и обеспечивает постоянные оптимальные условия работы двигателя с высокими показателями КПД, что приводит к экономии моторного топлива и уменьшает экологическое загрязнение окружающей среды. Постоянное зацепление применяемых зубчатых колес уменьшает их износ, повышает надежность в работе и долговечность предложенной автоматической бесступенчатой инерционной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174200C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172878C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174202C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2246058C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174201C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2277654C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171928C2 |
Изобретение относится к машиностроению. Автоматическая бесступенчатая механическая передача содержит корпус 12, соосные ведущий 1 и ведомый 2 валы, водило с радиальными осями 5, вращающиеся на них независимо друг от друга сблокированные по два сателлиты 6, 7 и сателлиты 9, сблокированные с маховиками 8, размещенные по одну сторону от радиальных осей 5 ведущее и ведомое центральные конические зубчатые колеса 3 и 4, установленное соосно оси передачи центральное коническое зубчатое опорное колесо 10. Упомянутое колесо 10 зацеплено с сателлитами 9 и посредством зубчатых колес 14, 15, 16, 17 связано с ведущим центральным коническим колесом 3. Вращение маховиков 8 с сателлитами 9 одновременно вокруг оси передачи и вокруг радиальных осей 5 водила приводит к торможению вращения водила в связи с постоянным изменением направления векторов моментов количества движения маховиков 8 относительно центральной точки О1. Повышено КПД и обеспечено автоматическое и бесступенчатое изменение в широких пределах величины передаваемого вращающего момента в зависимости от нагрузки. 6 з.п. ф-лы, 1 ил.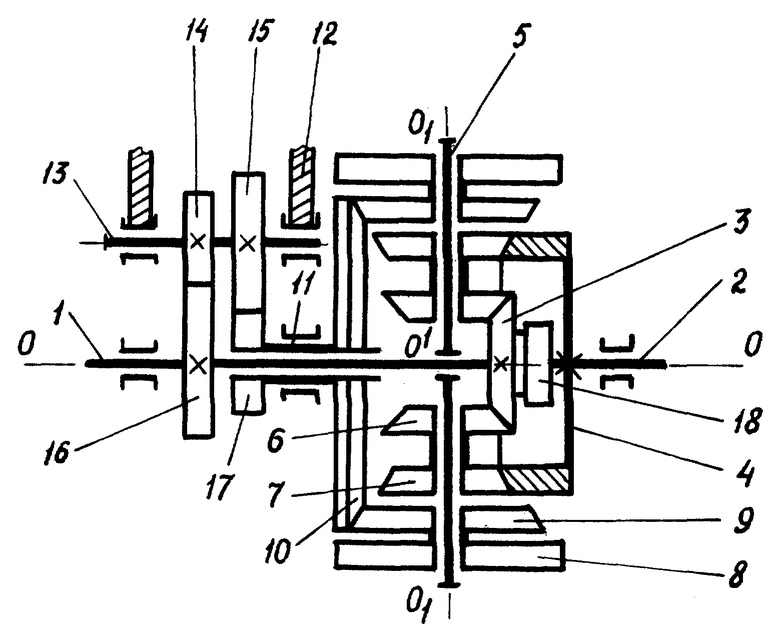
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072716C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОПУСКОМ ТРАНСПОРТА | 2015 |
|
RU2610925C1 |
| СПОСОБ ВЫРАБОТКИ КОНСЕРВИРОВАННОГО ПРОДУКТА "КОТЛЕТЫ ДОМАШНИЕ СО СМЕТАННЫМ СОУСОМ" | 2013 |
|
RU2504236C1 |

