Предлагаемые способ и устройство относится к области железнодорожной автоматики, телемеханики, связи и могут быть использованы для определения параметров движения поезда непосредственно на диспетчерском пункте.
Известны раздельные способы и устройства радиосвязи и радионавигации, в том числе и спутниковые (авт. свид. СССР №1267257; патенты РФ №№2049693, 2108252; Петрович Н.Т. Космическая радиосвязь. М.: Сов. радио, 1977, Чуров Е.П. Спутниковые системы радионавигации. М.: Сов. радио, 1977 и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются "Способ совмещенной радиосвязи и радионавигации и устройство, его реализующее, для железнодорожного транспорта" (патент РФ №2108252, В 61 L 25/02, 1996), которые и выбраны в качестве прототипов.
Указанные технические решения основаны на использовании дуплексного метода радиосвязи. Основное достоинство дуплексного метода радиосвязи состоит в том, что в нем исключается длина трассы прохождения сигнала. Поэтому его точность в основном зависит от параметров ретранслятора, устанавливаемого на борту локомотива, типа используемого сигнала и техники измерения временных интервалов.
В известных способе и устройстве используются простые сигналы, излучаемые и принимаемые на одной частоте, а для автоматического определения параметров движения поезда в качестве измерителя необходимо использовать контроллер, решающий систему двух уравнений: окружности и аппроксимирующего линию магистрали, что связано со значительными погрешностями и низкой помехоустойчивостью.
Технической задачей изобретения является повышение помехоустойчивости и точности определения параметров движения поезда за счет использования сложных сигналов с фазовой манипуляцией, их корреляционной обработки, передачи и приема на двух частотах.
Поставленная задача решается тем, что согласно способу совмещенной радиосвязи и радионавигации, заключающемуся в том, что между диспетчерским пунктом и локомотивом по дуплексному радиоканалу связи передают сообщения, в паузах между сообщениями в диспетчерский передатчик подают запросный видеоимпульсный навигационный сигнал, модулируют этим сигналом высокочастотное колебание диспетчерского передатчика, излучают модулированный сигнал в направлении локомотива, принимают и демодулируют его локомотивным приемником, полученный видеосигнал подают в локомотивный передатчик, модулируют этим сигналом высокочастотное колебание локомотивного передатчика, излучают модулированный сигнал в направлении диспетчерского пункта, принимают и демодулируют его диспетчерским приемником, фиксируют задержку ответного видеоимпульсного навигационного сигнала относительно запросного, по полученной задержке в пропорциональном соотношении определяют дальность локомотива от диспетчерского пункта, являющуюся координатой локомотива на железнодорожной магистрали, а дифференцируя данную координату, находят скорость поезда, используют в качестве запросного видеоимпульсного навигационного сигнала псевдослучайную последовательность, после модуляции этой последовательностью высокочастотного колебания диспетчерского передатчика на частоте ωc преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют фазоманипулирующий сигнал первой промежуточной частоты ωпр1=ωс+ωг1, усиливают его по мощности и излучают на частоте ω1=ωпр1 в направлении локомотива, излучают в направлении диспетчерского пункта фазоманипулированный сигнал на частоте ω2=ωг1, после его приема преобразуют по частоте с использованием частоты ωг2=ω1 второго гетеродина, выделяют фазоманипулированный сигнал второй промежуточной частоты ωпр2=ωг2-ω2=ωс, перемножают его с напряжением второго гетеродина, выделяют фазоманипулированный сигнал на частоте ωг1=ω2 первого гетеродина, демодулируют его с использованием напряжения первого гетеродина, выделяют ответную псевдослучайную последовательность, запросную и ответную псевдослучайные последовательности подвергают корреляционной обработке.
Поставленная задача решается тем, что в устройстве совмещенной радиосвязи и радионавигации, содержащем на диспетчерском пункте и локомотиве приемопередатчики, при этом на диспетчерском пункте к входу передатчика подключен одним из выходов видеогенератора, другой выход которого подключен к первому входу измерителя дальности и скорости локомотива, второй вход упомянутого измерителя соединен с выходом приемника, а на локомотиве выход приемника соединен с входом передатчика через переключатель, видеогенератор выполнен в виде генератора псевдослучайной последовательности, передатчик диспетчерского пункта выполнен в виде последовательно подключенных к первому выходу генератора псевдослучайной последовательности фазового манипулятора, второй вход которого соединен с выходом генератора высокой частоты, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности и передающей антенны, приемник диспетчерского пункта выполнен в виде последовательно включенных приемной антенны, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, перемножителя, второй вход которого соединен с выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом первого гетеродина, измеритель дальности и скорости локомотива выполнен в виде последовательно подключенных к второму выходу генератора псевдослучайной последовательности первого буферного запоминающего блока и блока корреляционной обработки, второй вход которого через второй буферный запоминающий блок соединен с выходом фазового детектора, и блок регистрации и анализа.
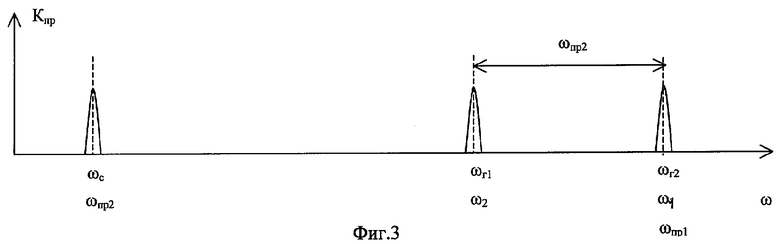
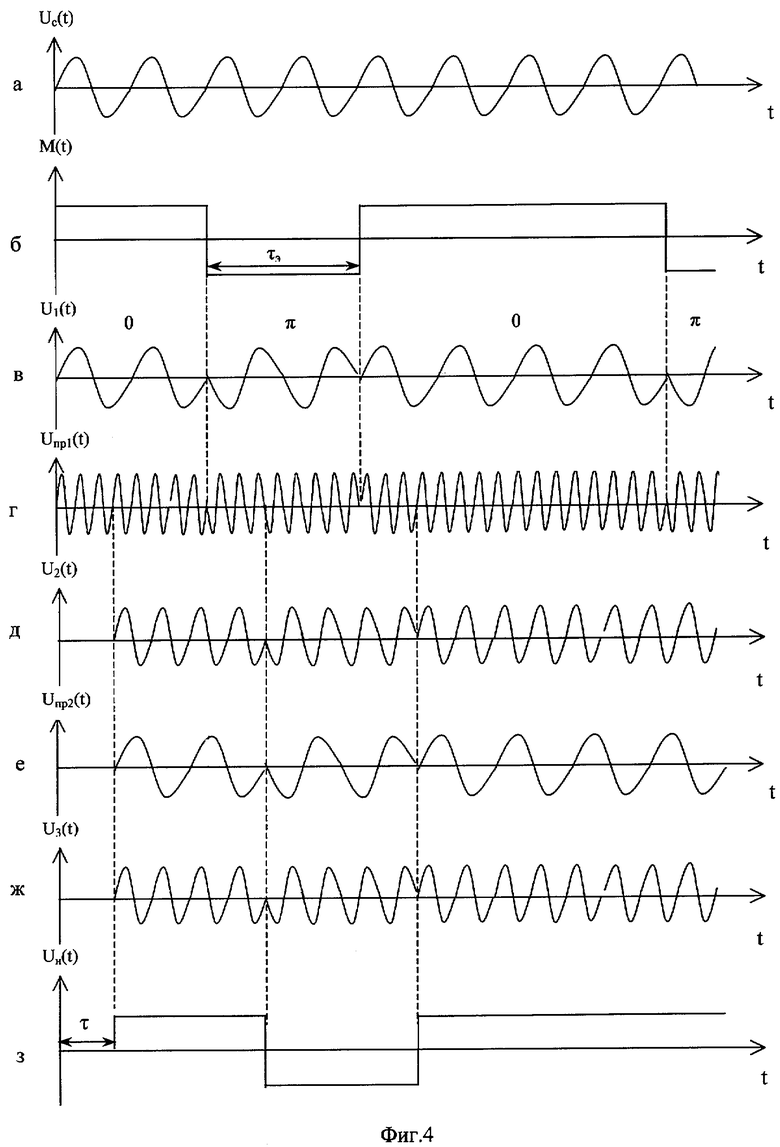
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1. Возможная осциллограмма на экране электронно-лучевого индикатора показана на фиг.2. Временные диаграммы, поясняющие сущность предлагаемых способа и устройства, изображены на фиг.4. Частотная диаграмма, поясняющая преобразования сигналов по частоте, показана на фиг.3.
Устройство содержит диспетчерский пункт 1 и локомотив 10. Диспетчерский пункт 1 содержит последовательно подключенные к первому выходу генератора 2 псевдослучайной последовательности фазовый манипулятор 4, второй вход которого соединен с выходом генератора 3 высокой частоты, первый смеситель 6, второй вход которого соединен с выходом первого гетеродина 5, усилитель 7 первой промежуточной частоты, первый усилитель 8 мощности и передающую антенну 9, последовательно включенные приемную антенну 16, второй усилитель 17 мощности, второй смеситель 19, второй вход которого соединен с выходом второго гетеродина 18, усилитель 20 второй промежуточной частоты, перемножитель 21, второй вход которого соединен с выходом гетеродина 18, полосовой фильтр 22, фазовый детектор 23, второй вход которого соединен с выходом гетеродина 5, второй буферный запоминающий блок 25, блок 26 корреляционной обработки, второй вход которого через первый буферный запоминающий блок 24 соединен с вторым выходом генератора 2 псевдослучайной последовательности, и блок 27 регистрации и анализа.
Генератор 3 высокой частоты, фазовый манипулятор 4, гетеродин 5, смеситель 6, усилитель 7 первой промежуточной частоты, усилитель 8 мощности и передающая антенна 9 образуют передатчик диспетчерского пункта.
Приемная антенна 16, усилитель 17 мощности, гетеродин 18, смеситель 19, усилитель 20 второй промежуточной частоты, перемножитель 21, полосовой фольтр 22 и фазовый детектор 23 образуют приемник диспетчерского пункта.
Буферные запоминающие блоки 24 и 25, блок 26 корреляционной обработки, блок 27 регистрации и анализа образуют измеритель дальности до локомотива и его скорости.
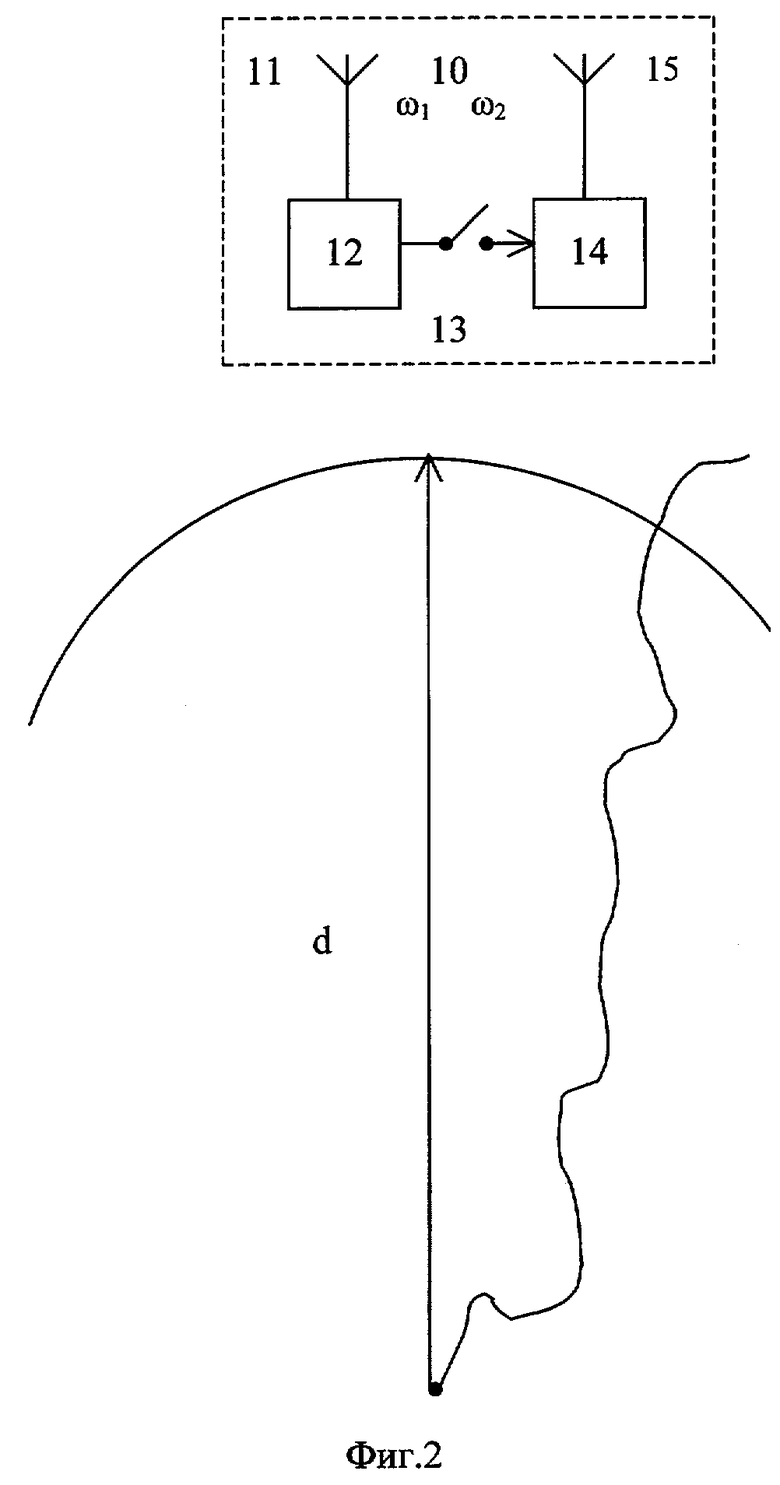
Бортовая аппаратура локомотива 10 содержит последовательно включенные приемную антенну 11, приемник 12, переключатель 13, передатчик 14 и передающую антенну 15.
Устройство, реализующее предлагаемый способ, работает следующим образом.
На диспетчерском пункте 1 от генератора 2 псевдослучайной последовательности вводится модулирующий код M(t) (фиг.4, б) в передатчик в отрезки времени, когда не передаются сообщения. Данный код поступает на первый вход фазового манипулятора 4, на второй вход которого подается высокочастотное колебание с выхода генератора 3 (фиг.4, а)
Uc(t)=υс*Cos(ωct+ϕc), 0≤t≤Tc,
где υc, ωc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
На выходе фазового манипулятора 4 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.4, в)
U1(t)=υc*Cos[ωct+ϕk(t)+ϕc], 0≤t≤Tc,
где ϕk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (фиг.4, б), причем ωk(t)=Const при k*τэ<t<(к+1)*τЭ и может изменяться скачком при t=k*τЭ, т.е. на границах между элементарными посылками (k=1, 2,...,N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=N*τэ),
который поступает на первый вход смесителя 6, на второй вход которого подается напряжение гетеродина 5
Uг1(t)=υг1*Cos(ωг1t+ϕг1).
На выходе смесителя 6 образуются напряжения комбинационных частот. Усилителем 7 выделяется напряжение первой промежуточной (суммарной) частоты (фиг.4, г)
Uпр1(t)=υпр1*Cos[ωпр1t+ϕk(t)+ϕпр1], 0≤t≤Тс,
где υпр1= K1*υc*υг1;
K1*υc*υг1;
K1 - коэффициент передачи смесителя;
ωпр1=ωс+ωг1 - первая промежуточная частота (фиг.3);
ϕпр1=ϕс+ϕг1.
Это напряжение представляет собой ФМн-сигнал на первой промежуточной частоте ωпр1 и после усиления в усилителе 8 мощности излучается передающей антенной 9 в направлении локомотива 10, где его принимает приемник 12. В режиме навигационных измерений, например для диспетчерского контроля, переключатель 13 на борту локомотива замыкается, в результате чего модулирующий код M(t) поступает на локомотивный передатчик 14 и после модуляции по высокой частоте излучается передающей антенной 15 в направлении диспетчерского пункта 1 на частоте ω2=ωг1 (фиг.3).
Приемной антенной 16 диспетчерского пункта принимается ФМн-сигнал (фиг.4, д)
U2(t)=υ2*Cos[ω2(t-τ)+ϕk(t-τ)+ϕ2], 0≤t≤Tc,
который через усилитель 17 мощности поступает на первый вход смесителя 19, на второй вход которого подается напряжение гетеродина 18
Uг2(t)=υг2*Cos(ωг2t+ϕг2).
На выходе смесителя 19 образуются напряжения комбинационных частот. Усилителем 20 выделяется напряжение второй промежуточной (разностной) частоты (фиг.4, е)
Uпр2(t)=υпр2*Cos[ωпр2(t-τ)+ϕk(t-τ)+ϕпр2], 0≤t≤Tc,
где υпр2= K1*υ2*υг2;
K1*υ2*υг2;
ωпp2=ωг2-ω2 - вторая промежуточная частота;
ϕпр2=ϕг2-ϕ2.
Это напряжение представляет собой ФМн-сигнал на второй промежуточной частоте и поступает на первый вход перемножителя 21, на второй вход которого подается напряжение Uг2(t) второго гетеродина 18. На выходе перемножителя 21 образуется напряжение (фиг.4, ж)
U3(t)=υ3*Cos[ω2t-ϕk(t-τ)+ϕ2+ϕ0], 0≤t≤Tc,
где υ3=K2*υпр2*υг2;
K2 - коэффициент передачи перемножителя;
ω2=ωг1,
которое представляет собой ФМн-сигнал на частоте ωг1 первого гетеродина 5. Это напряжение поступает на первый вход фазового детектора 23, на второй вход которого подается напряжение Uг1(t) первого гетеродина 5. На выходе фазового детектора образуется низкочастотное напряжение (фиг.4, з)
Uн(t)=υн*Cos[ϕk(t-τ)+ϕ0], 0≤t≤Tc,
где υ3=K3*υ3*υг1;
K2 - коэффициент передачи фазового детектора,
которое представляет собой аналог модулирующего кода M(t) (фиг.4, б), задержанный на время τ.
Модулирующий код M(t) (фиг.4, б) и его аналог Uн(t) (фиг.4, з) запоминаются в буферных блоках 24 и 25 соответственно, а затем поступают на два входа блока 26 корреляционной обработки, где определяется время задержки τ ретранслированного приемопередатчиком локомотива ответного сигнала и соответствующая ей частота интерференции F, которая определяет производную этой задержки

где 
Измеренные значения τ и  поступают в блок 27 регистрации и анализа.
поступают в блок 27 регистрации и анализа.
Если в качестве измерителя дальности от диспетчерского пункта до локомотива и скорости последнего используется электронно-лучевой индикатор секторного или кругового обзора, то вследствие задержки ретранслированного приемопередатчиком локомотива ответного сигнала на время τ на экране такого индикатора вычерчивается развертываемым лучом дуга (фиг.2), радиус которой в определенном масштабе отображает дальность от диспетчерского пункта до локомотива, равную
d=c*τ/2,
где с - скорость распространения радиоволн.
Если на экран нанести в том же масштабе линию магистрали, которой движется поезд, то пересечение этой линии с указанной выше дугой даст координату поезда, а его скорость можно определить как разность двух его координат в единицу времени.
Для автоматизации определения параметров движения поезда в качестве измерителя можно использовать контроллер, решающий систему двух уравнений: окружности и апроксимирующего линию магистрали:
где (х, y) - координаты поезда;
(x0, y0) - координаты диспетчерского пункта (центр окружности);
t - текущее время.
При наличии в линии связи промежуточного ретранслятора, например спутникового, определяется расстояние от него до локомотива. В этом случае также необходимо решать систему двух уравнений, подобную предыдущей, но первое из этих уравнений в трехмерном пространстве должно быть уравнением сферы:

Скорость поезда (локомотива) определяется путем дифференцирования в контроллере текущей координаты локомотива.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами обеспечивают повышение помехоустойчивости и точности определения параметров движения поезда. Это достигается за счет использования сложных сигналов с фазовой манипуляцией, их корреляционной обработки, передачи и приема на двух частотах.
Сложные сигналы с фазовой манипуляцией обладают высокой энергетической и структурной скрытностью. Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскирован шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Указанные сигналы позволяют применять новый вид селекции - структурную селекцию.
Псевдослучайные последовательности имеют корреляционную функцию, обладающую хорошими свойствами: она имеет один главный лепесток, значительной величины, и низкий уровень боковых лепестков. Это обстоятельство позволяет с высокой точностью измерять временную задержку τ, а следовательно, и дальность от диспетчерского пункта до локомотива.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2009 |
|
RU2385246C1 |
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2005 |
|
RU2297045C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2321177C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2452985C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2310895C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
Группа изобретений относится к области железнодорожной автоматики, телемеханики, связи и может быть использована для определения параметров движения поезда непосредственно на диспетчерском пункте. Диспетчерский пункт содержит генератор псевдослучайной последовательности, генератор высокой частоты, фазовый манипулятор, два гетеродина, два смесителя, усилитель первой промежуточной частоты, два усилителя мощности, передающую и приемную антенны, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр, фазовый детектор, два буферных запоминающих блока, блок корреляционной обработки, блок регистрации и анализа. В бортовую аппаратуру локомотива входят приемная и передающая антенны, приемник, переключатель и передатчик. Параметры движения поезда определяются с использованием сложных сигналов с фазовой манипуляцией, для которых предусмотрены корреляционная обработка, передача и прием на двух частотах. Группа изобретений позволяет повысить помехоустойчивость и точность определения параметров движения поезда. 2 н.п. ф-лы, 4 ил.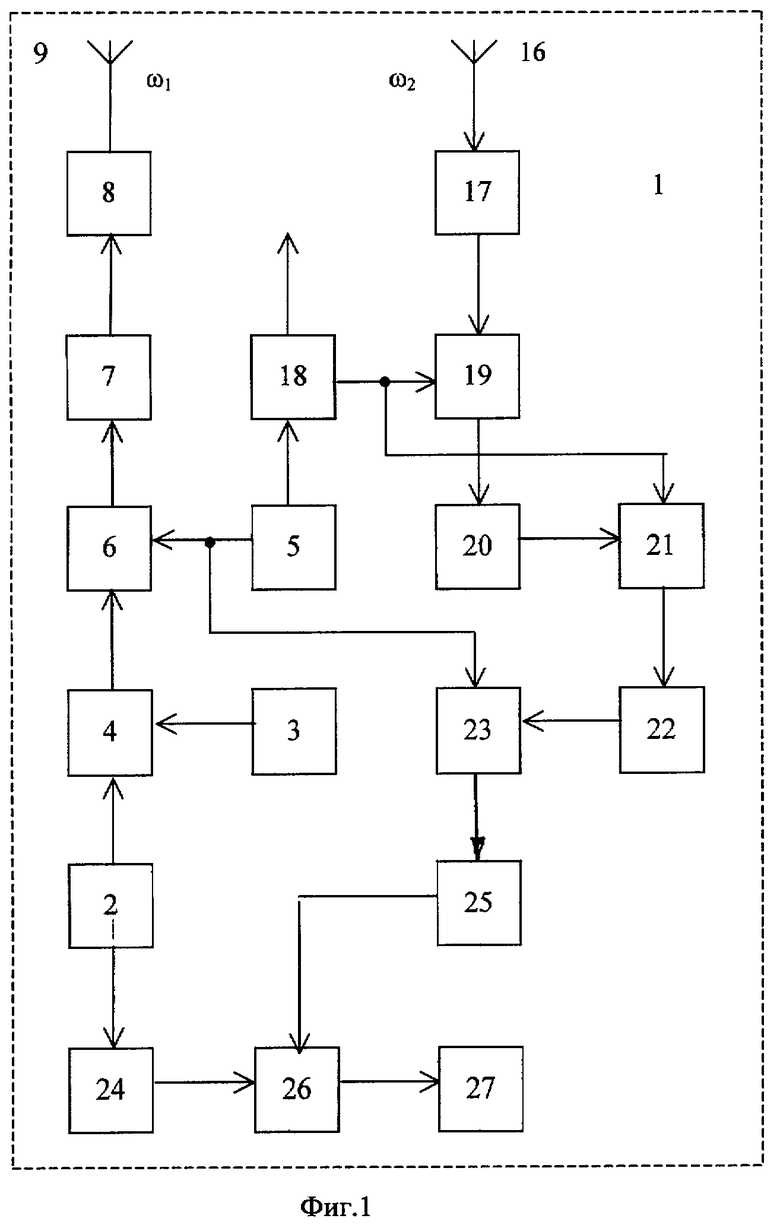
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2108252C1 |
| RU 2002114842 А, 27.02.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 1991 |
|
RU2049693C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |

