Предлагаемые способ и устройство относятся к области железнодорожной автоматики, телемеханики, связи и могут быть использованы для определения параметров движения поезда непосредственно на диспетчерском пункте.
Известны способы и устройства радиосвязи и радионавигации, в том числе и спутниковые (авт. свид. СССР №1.267.257; патенты РФ №№2.049.693, 2.108.252, 2.278.047, 2.278.048; Петрович Н.Т. Космическая радиосвязь. М.: Сов. радио, 1977; Чуров Е.П. Спутниковые системы радионавигации. М.: Сов. радио, 1977, и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ совмещенной радиосвязи и радионавигации и устройство, его реализующее, для железнодорожного транспорта» (патент РФ №2.278.048, B61L 25/02, 2004), которые и выбраны в качестве прототипов.
Указанные технические решения основаны на использовании дуплексного метода радиосвязи. Основное достоинство дуплексного метода радиосвязи состоит в том, что в нем исключается длина трассы прохождения сигнала. Поэтому его точность в основном зависит от параметров ретранслятора, устанавливаемого на борту локомотива, типа используемого сигнала и техники измерения временных интервалов. Известные технические решения позволяют повысить помехоустойчивость и точность определения параметров движения поезда непосредственно на диспетчерском пункте.
Однако возможности данных способа и устройства используются не в полной мере. Они могут использоваться и для измерения дальности, радиальной скорости и угловых координат поезда, что обеспечивает определение местоположения поезда в реальном масштабе времени.
Технической задачей изобретения является расширение функциональных возможностей способа и устройства путем измерения дальности, радиальной скорости и угловых координат поезда в реальном масштабе времени.
Поставленная задача решается тем, что способ совмещенной радиосвязи и радионавигации, заключающийся, в соответствии с ближайшим аналогом, в том, что между диспетчерским пунктом и локомотивом по дуплексному радиоканалу связи передают сообщения, в паузах между сообщениями в диспетчерский передатчик подают запросный видеоимпульсный навигационный сигнал, в качестве которого используют псевдослучайную последовательность, модулируют этим сигналом высокочастотное колебание диспетчерского передатчика на частоте ωc, преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют фазоманипулированный сигнал первой промежуточной частоты ωпр1=ωс+ωг1, усиливают его по мощности, излучают модулированный сигнал на частоте ω1=ωпр1 в направлении локомотива, принимают и демодулируют его локомотивным приемником, полученный видеосигнал подают в локомотивный передатчик, модулируют этим сигналом высокочастотное колебание локомотивного передатчика, излучают в направлении диспетчерского пункта фазоманипулированный сигнал на частоте ω2=ωг1, принимают и преобразуют по частоте с использованием частоты ωг2=ω1 второго гетеродина, выделяют фазоманипулированный сигнал второй промежуточной частоты ωпр2±Ωд=ωг2-ω2=ωс где ±Ωд - доплеровское смещение, отличается от ближайшего аналога тем, что фазоманипулированный сигнал второй промежуточной частоты умножают и делят по фазе на два, выделяют гармоническое колебание на частоте ωпр2±Ωд, сравнивают его по частоте с запросным высокочастотным колебанием на частоте ωс, выделяют напряжение доплеровской частоты ±Ωд и по его величине и знаку определяют величину и направление радиальной скорости локомотива, одновременно запросный сложный сигнал с фазовой манипуляцией на частоте ωс пропускают через первый блок регулируемой задержки, перемножают его с фазоманипулированным сигналом второй промежуточной частоты, выделяют низкочастотное напряжение, формируя тем самым первую корреляционную функцию R1(τ), где τ - текущая временная задержка, изменением временной задержки τ поддерживают первую корреляционную функцию на максимальном уровне, фиксируют временную задержку τЗ между запросным и ретранслированными сигналами и по ее значению определяют дальность до локомотива, ретранслированный сигнал принимают на вторую приемную антенну, усиливают его по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют второй фазоманипулированный сигнал второй промежуточной частоты ωпр2±Ωд=ωг2-ω2=ωс, одновременно первый фазоманипулированный сигнал второй промежуточной частоты ωпр2±Ωд=ωг2-ω2 пропускают через второй блок регулируемой задержки, перемножают его со вторым фазоманипулированным сигналом второй промежуточной частоты ωпр2±Ωд=ωг2-ω2, выделяют низкочастотное напряжение, формируя тем самым вторую корреляционную функцию R2(τ), изменением временной задержки τ поддерживают вторую корреляционную функцию R2(τ) на максимальном уровне, фиксируют временную задержку τЗ2 между ретранслированными сигналами, принимаемыми двумя антеннами, по ее значению определяют азимут локомотива, причем приемные антенны разносят на расстояние d, где d - измерительная база.
Поставленная задача решается тем, что устройство совмещенной радиосвязи и радионавигации, содержащее на диспетчерском пункте и локомотиве приемопередатчики, при этом на локомотиве выход приемника соединен с входом передатчика через переключатель, передатчик диспетчерского пункта выполнен в виде последовательно включенных генератора псевдослучайной последовательности, фазового манипулятора, второй вход которого соединен с выходом генератора высокой частоты, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности и передающей антенны, приемник диспетчерского пункта выполнен в виде блока регистрации и анализа, первого блока корреляционной обработки, а также последовательно включенных первой приемной антенны, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, и первого усилителя второй промежуточной частоты, отличается от ближайшего аналога тем, что приемник диспетчерского пункта снабжен второй приемной антенной, третьим усилителем мощности, третьим и четвертым смесителями, вторым усилителем второй промежуточной частоты, вторым блоком корреляционной обработки, индикатором дальности, индикатором азимута, удвоителем фазы, делителем фазы на два, двумя узкополосными фильтрами и измерителем частоты Доплера, причем к выходу первого усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, третий смеситель, второй вход которого соединен с выходом генератора высокой частоты, второй узкополосный фильтр, измеритель частоты Доплера и блок регистрации и анализа, к выходу первого усилителя второй промежуточной частоты последовательно подключены первый блок корреляционной обработки и индикатор дальности, выход которого соединен с вторым входом блока регистрации и анализа, к выходу второй приемной антенны последовательно подключены третий усилитель мощности, четвертый смеситель, второй вход которого соединен с выходом второго гетеродина, второй усилитель второй промежуточной частоты, второй блок корреляционной обработки и индикатор азимута, выход которого соединен с третьим входом блока регистрации и анализа, каждый блок корреляционной обработки выполнен в виде последовательно включенных перемножителя, второй вход которого соединен с первым выходом блока регулируемой задержки, фильтра нижних частот, экстремального регулятора и блока регулируемой задержки, первый вход перемножителя первого блока корреляционной обработки соединен с выходом первого усилителя второй промежуточной частоты, второй вход блока регулируемой задержки соединен с выходом фазового манипулятора, а выход подключен к индикатору дальности, первый вход перемножителя второго блока корреляционной обработки соединен с выходом второго усилителя второй промежуточной частоты, второй вход блока регулируемой задержки соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к индикатору азимута, первая и вторая приемные антенны разнесены на расстояние d, где d - измерительная база.
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1 и 2. Частотная диаграмма, поясняющая преобразование сигналов по частоте, показана на фиг.3.
Устройство содержит аппаратуру диспетчерского пункта 1 и локомотива 10. Аппаратура диспетчерского пункта 1 содержит последовательно включенные генератор 2 псевдослучайной последовательности (ПСП), фазовый манипулятор 4, второй вход которого соединен с первым выходом генератора 3 высокой частоты, первый смеситель 6, второй вход соединен с выходом первого гетеродина 5, усилитель 7 первой промежуточной частоты, первый усилитель 8 мощности и передающую антенну 9, последовательно включенные первую приемную антенну 16, второй усилитель 17 мощности, второй смеситель 19, второй вход которого соединен с выходом второго гетеродина 18, первый усилитель 20 второй промежуточной частоты, удвоитель 21 фазы, делитель 22 фазы на два, первый узкополосный фильтр 23, третий смеситель 24, второй вход которого соединен с выходом генератора 3 высокой частоты, второй узкополосный фильтр 25, измеритель 26 частоты Доплера и блок 27 регистрации и анализа, последовательно подключенные к выходу первого усилителя 20 второй промежуточной частоты перемножитель 29, второй вход которого через блок 32 регулируемой задержки соединен с выходом фазового манипулятора 4, фильтр 30 нижних частот, экстремальный регулятор 31, блок 32 регулируемой задержки и индикатор 33 дальности, выход которого соединен с вторым входом блока 27 регистрации и анализа, последовательно включенные вторую приемную антенну 34, третий усилитель 35 мощности, четвертый смеситель 36, второй вход которого соединен с выходом второго гетеродина 18, второй усилитель 37 второй промежуточной частоты, перемножитель 39, второй вход которого через блок 42 регулируемой задержки соединен с выходом первого усилителя 20 второй промежуточной частоты, фильтр 40 нижних частот, экстремальный регулятор 41, блок 42 регулируемой задержки и индикатор 43 азимута, выход которого соединен с третьим входом блока 27 регистрации и анализа. Перемножитель 29 (39), фильтр 30 (40) нижних частот, экстремальный регулятор 31 (41) и блок 32 (42) регулируемой задержки образуют первый 28 (второй 38) блок корреляционной обработки.
Бортовая аппаратура локомотива 10 содержит последовательно включенные приемную антенну 11, приемник 12, переключатель 13, передатчик 14 и передающую антенну 15.
Устройство, реализующее предлагаемый способ, работает следующим образом.
На диспетчерском пункте 1 от генератора 2 псевдослучайной последовательности вводится модулирующий код M(t) в передатчик в отрезки времени, когда не передаются сообщения. Данный код поступает на первый вход фазового манипулятора 4, на второй вход которого подается высокочастотное колебание с выхода генератора 3
Uc(t)=υc×Cos(ωct+φc), 0≤t≤Tc,
где υс, ωс, φс, Тс - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
На выходе фазового манипулятора 4 образуется сложный сигнал с фазовой манипуляцией (ФМн)
U1(t)=υc×Cos[ωct+φk(t)+φс], 0≤t≤Tc,
где φk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем φk(t)=const при k×τэ<t<(к+1)×τэ и может изменяться скачком при t=k×τэ, т.е. на границах между элементарными посылками (k=1, 2,…, N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Tc=N×τэ);
который поступает на первый вход смесителя 6, на второй вход которого подается напряжение гетеродина 5
Uг1(t)=υг1×Cos (ωг1t+φг1).
На выходе смесителя 6 образуются напряжения комбинационных частот. Усилителем 7 выделяется напряжение первой промежуточной (суммарной) частоты
Uпр1(t)=υпр1×Cos[ωпр1t+φk(t)+φпр1], 0≤t≤Tc,
где υпр1=1/2υc×υг1;
ωпр1=ωc+ωг1 - первая промежуточная (суммарная) частота;
φпр1=φс+φг1.
Это напряжение представляет собой ФМн-сигнал на первой промежуточной частоте ωпр1 и после усиления в усилителе 8 мощности излучается передающей антенной 9 в направлении локомотива 10, где его принимает приемник 12. В режиме навигационных измерений, например для диспетчерского контроля, переключатель 13 на борту локомотива замыкается, в результате чего модулирующий код M(t) поступает на локомотивный передатчик 14 и после модуляции колебания высокой частоты излучается передающей антенной 15 в направлении диспетчерского пункта 1 на частоте ω2=ωг1.
Приемными антеннами 16 и 34 диспетчерского пункта 1 принимаются ФМн-сигналы:
U2(t)=υ2×Cos[ω2±Ωд)×(t-τЗ1)+φk(t-τЗ1)+φ2],
U3(t)=υ3×Cos[(ω2±Ωд)×(t-τЗ2)+φk(t-τЗ2)+φ3],
где ±Ωд - доплеровское смещение частоты;
τЗ1=2R/с - время запаздывания ретранслированного сигнала относительно запросного;
R - расстояние между диспетчерским пунктом и локомотивом;
с - скорость распространения радиоволн;
τЗ1=t2-t1,
t1, t2 - время прохождения ретранслированного сигнала от локомотива до первой 16 и второй 34 приемных антенн, которые через усилители 17 и 35 мощности поступают на первые входы смесителей 19 и 36 соответственно, на вторые входы которых подается напряжение гетеродина 18
Uг2(t)=υг2×Cos(ωг2t+φг2).
На выходе смесителей 19 и 36 образуются напряжения комбинационных частот. Усилителями 20 и 37 выделяются напряжения второй промежуточной (разностной) частоты:
Uпр2(t)=υпр2×Cos[(ωпр2±Ωд)×(t-τЗ1)-φk(t-τЗ1)+φпр2],
Uпр3(t)=υпр3×Cos[(ωпр2±Ωд)×(t-τЗ2)-φk(t-τз2)+φпр3],
где υпр2=1/2υ2×υг2;
υпр3=1/2υ3×υг2;
ωпр2=ωг2-ω2 - вторая промежуточная (разностная) частота;
φпр2=φг2-φ2;
φпр3=φг2-φ3.
Напряжение Uпр2(t) с выхода усилителя 20 второй промежуточной частоты поступает на вход удвоителя 21 фазы. В качестве последнего может использоваться перемножитель, на два входа которого подается одно и то же напряжение. На выходе удвоителя 21 фазы образуется гармоническое колебание
U4(t)=υ4×Cos[2(ωпр2±Ωд)×(t-τЗ1)+2φпр2],
где υ4=1/2υпр2 2,
в котором фазовая манипуляция уже отсутствует, так как 2φk(t-τЗ1)={0, 2π}. Ширина спектра Δfc сложного ФМн-сигнала определяется длительностью τэ его элементарных посылок
Δfс=1/τэ.
Тогда как ширина спектра Δf2 его второй гармоники определяется длительностью сигнала Tc
Δf2=1/Tc.
Следовательно, при удвоении фазы широкополосного ФМн-сигнала его спектр сворачивается в N раз
Δfc/Δf2=N.
Гармоническое колебание U4(t) поступает на вход делителя 22 фазы на два, на выходе которого образуется гармоническое колебание
U5(t)=υ5×Cos [(ωпр2±Ωд)×(t-τЗ1)+φпр2],
которое выделяется узкополосным фильтром 23 и поступает на первый вход смесителя 24. На второй вход последнего подается гармоническое напряжение Uc(t) с выхода генератора 3 высокой частоты. На выходе смесителя 24 образуются напряжения комбинационных частот. Узкополосным фильтром 25 выделяется напряжение доплеровской частоты
U6(t)=υ6×Cos(±Ωд+φ6), 0≤t≤Тс,
где υ6=1/2υ5×υc;
φ6=φпр2-φс;
который поступает на вход измерителя 26 доплеровской частоты, который обеспечивает измерение доплеровской частоты ±Ωд. Причем величина и знак доплеровской частоты определяют величину и направление радиальной скорости локомотива. Значение доплеровской частоты фиксируется блоком 27 регистрации и анализа.
Одновременно напряжение Uпр2(t) с выхода усилителя 20 второй промежуточной частоты поступает на первый вход перемножителя 29, на второй вход которого подается сложный ФМн-сигнал U1(t) с выхода фазового манипулятора 4 через блок 32 регулируемой задержки. Полученное на выходе перемножителя 29 напряжение пропускается через фильтр 30 нижних частот, на выходе которого формируется корреляционная функция R1(τ). Экстремальный регулятор 31, предназначенный для поддержания максимального значения корреляционной функции R1(τ) и подключенный к выходу фильтра 30 нижних частот, воздействует на управляющий вход блока 32 регулируемой задержки и поддерживает вводимую им задержку τ равной τЗ1(τ=τЗ1), что соответствует максимальному значению R1(τ). Индикатор 33 дальности, связанный со шкалой блока 32 регулируемой задержки, позволяет непосредственно считывать измеренное значение расстояния R между диспетчерским пунктом 1 и локомотивом
R=с×τЗ1/2.
Следовательно, задача измерения расстояния (дальности) R сводится к измерению временной задержки τЗ1 ретранслированного сигнала относительно запросного.
Напряжение Uпр3(t) с выхода усилителя 37 второй промежуточной частоты поступает на первый вход перемножителя 39, на второй вход которого подается напряжение Uпр2(t) с выхода усилителя 20 второй промежуточной частоты через блок 42 регулируемой задержки. Полученное на выходе перемножителя 39 напряжение пропускается через фильтр 40 нижних частот, на выходе которого формируется корреляционная функция R2(τ). Экстремальный регулятор 41, предназначенный для поддержания максимального значения корреляционной функции R2(τ) и подключенный к выходу фильтра 40 нижних частот, воздействует на управляющий вход блока 42 регулируемой задержки и поддерживает вводимую им задержку τ равной τЗ2(τ=τЗ2), что соответствует максимальному значению корреляционной функции R2(τ). Шкала блока 42 регулируемой задержки (индикатор 43 азимута) проградуирована непосредственно в значения угловой координаты локомотива
β=arcCosс×τЗ2/d,
где β - азимут локомотива;
d - измерительная база.
Значение азимута β локомотива фиксируется блоком 27 регистрации и анализа.
Следовательно, задача измерения азимута β локомотива сводится к измерению относительной временной задержки τЗ2 между ретранслированными сигналами, принимаемыми антеннами 16 и 34.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами обеспечивают измерение дальности, радиальной скорости и азимута локомотива в реальном масштабе времени, т.е. местоположение локомотива и параметры его движения в реальном масштабе времени. Тем самым функциональные возможности способа и устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2008 |
|
RU2397548C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2009 |
|
RU2411532C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278048C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2388629C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2009 |
|
RU2418714C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2378138C1 |
Предлагаемые способ и устройство относятся к области железнодорожной автоматики, телемеханики, связи и могут быть использованы для определения параметров движения поезда непосредственно на диспетчерском пункте. Устройство содержит аппаратуру диспетчерского пункта (1) и локомотива (10). Аппаратура диспетчерского пункта (1) содержит генератор (2) псевдослучайной последовательности, генератор (3) высокой частоты, фазовый манипулятор (4), первый гетеродин (5), первый смеситель (6), усилитель (7) первой промежуточной частоты, первый усилитель (8) мощности, передающую антенну (9), первую (16) и вторую (34) приемные антенны, второй (17) и третий (35) усилители мощности, второй гетеродин (18), второй (19), третий (24) и четвертый (36) смесители, первый (20) и второй (37) усилители второй промежуточной частоты, удвоитель (21) фазы, делитель (22) фазы на два, первый (23) и второй (25) узкополосные фильтры, измеритель (26) частоты Доплера, блок (27) регистрации и анализа, первый (28) и второй (38) блоки корреляционной обработки, первый (29) и второй (39) перемножители, первый (30) и второй (40) фильтры нижних частот, первый (31) и второй (41) экстремальные регуляторы, первый (32) и второй (42) блоки регулируемой задержки, индикатор (33) дальности и индикатор (43) азимута. Бортовая аппаратура локомотива (10) содержит приемную антенну (11), приемник (12), переключатель (13), передатчик (14) и передающую антенну (15). Техническим результатом изобретения является расширение функциональных возможностей способа и устройства путем измерения дальности, радиальной скорости и угловых координат поезда в реальном масштабе времени. 2 н.п. ф-лы, 1 ил.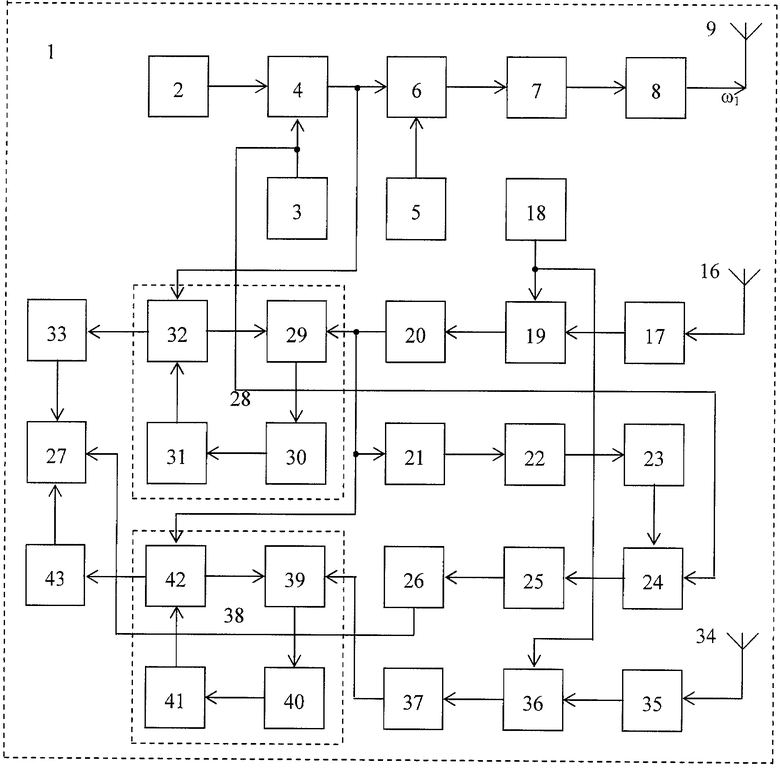
1. Способ совмещенной радиосвязи и радионавигации, заключающийся в том, что между диспетчерским пунктом и локомотивом по дуплексному радиоканалу связи передают сообщения, в паузах между сообщениями в диспетчерский передатчик подают запросный видеоимпульсный навигационный сигнал, в качестве которого используют псевдослучайную последовательность, модулируют этим сигналом высокочастотное колебание диспетчерского передатчика на частоте ωc, преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют фазоманипулированный сигнал первой промежуточной частоты ωпр1=ωс+ωг1, усиливают его по мощности, излучают модулированный сигнал на частоте ω1=ωпр1 в направлении локомотива, принимают и демодулируют его локомотивным приемником, полученный видеосигнал подают в локомотивный передатчик, модулируют этим сигналом высокочастотное колебание локомотивного передатчика, излучают в направлении диспетчерского пункта фазоманипулированный сигнал на частоте ω2=ωг1, принимают и преобразуют по частоте с использованием частоты ωг2=ω1 второго гетеродина, выделяют фазоманипулированный сигнал второй промежуточной частоты ωпр2±Ωд=ωг2-ω2=ωс, где ±Ωд - доплеровское смещение, отличающийся тем, что фазоманипулированный сигнал второй промежуточной частоты умножают и делят по фазе на два, выделяют гармоническое колебание на частоте ωпр2±Ωд, сравнивают его по частоте с запросным высокочастотным колебанием на частоте ωс выделяют напряжение доплеровской частоты ±Ωд и по его величине и знаку определяют величину и направление радиальной скорости локомотива, одновременно запросный сложный сигнал с фазовой манипуляцией на частоте ωс пропускают через первый блок регулируемой задержки, перемножают его с фазоманипулированным сигналом второй промежуточной частоты, выделяют низкочастотное напряжение, формируя тем самым первую корреляционную функцию R1(τ), где τ - текущая временная задержка, изменением временной задержки τ поддерживают первую корреляционную функцию на максимальном уровне, фиксируют временную задержку τЗ1 между запросным и ретранслированным сигналами и по ее значению определяют дальность до локомотива, ретранслированный сигнал принимают на вторую приемную антенну, усиливают его по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют второй фазоманипулированный сигнал второй промежуточной частоты ωпр2±Ωд=ωг2-ω2=ωc, одновременно первый фазоманипулированный сигнал второй промежуточной частоты ωпр2±Ωд=ωг2-ω2 пропускают через второй блок регулируемой задержки, перемножают его со вторым фазоманипулированным сигналом второй промежуточной частоты ωпр1±Ωд=ωг2-ω2, выделяют низкочастотное напряжение, формируя тем самым вторую корреляционную функцию R1(τ), изменением временной задержки τ поддерживают вторую корреляционную функцию на максимальном уровне, фиксируют временную задержку τЗ2 между ретранслированными сигналами, принимаемыми двумя антеннами, по ее значению определяют азимут локомотива, причем приемные антенны разносят на расстояние d, где d - измерительная база.
2. Устройство совмещенной радиосвязи и радионавигации, содержащее на диспетчерском пункте и локомотиве приемопередатчики, при этом на локомотиве выход приемника соединен с входом передатчика через переключатель, передатчик диспетчерского пункта выполнен в виде последовательно включенных генератора псевдослучайной последовательности, фазового манипулятора, второй вход которого соединен с выходом генератора высокой частоты, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности и передающей антенны, приемник диспетчерского пункта выполнен в виде блока регистрации и анализа, первого блока корреляционной обработки, а также последовательно включенных первой приемной антенны, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина, и первого усилителя второй промежуточной частоты, отличающееся тем, что приемник диспетчерского пункта снабжен второй приемной антенной, третьим усилителем мощности, третьим и четвертым смесителями, вторым усилителем второй промежуточной частоты, вторым блоком корреляционной обработки, индикатором дальности, индикатором азимута, удвоителем фазы, делителем фазы на два, двумя узкополосными фильтрами и измерителем частоты Доплера, причем к выходу первого усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, третий смеситель, второй вход которого соединен с выходом генератора высокой частоты, второй узкополосный фильтр, измеритель частоты Доплера и блок регистрации и анализа, к выходу первого усилителя второй промежуточной частоты последовательно подключены первый блок корреляционной обработки и индикатор дальности, выход которого соединен с вторым входом блока регистрации и анализа, к выходу второй приемной антенны последовательно подключены третий усилитель мощности, четвертый смеситель, второй вход которого соединен с выходом второго гетеродина, второй усилитель второй промежуточной частоты, второй блок корреляционной обработки и индикатор азимута, выход которого соединен с третьим входом блока регистрации и анализа, каждый блок корреляционной обработки выполнен в виде последовательно включенных перемножителя, второй вход которого соединен с первым выходом блока регулируемой задержки, фильтра нижних частот, экстремального регулятора и блока регулируемой задержки, первый вход перемножителя первого блока корреляционной обработки соединен с выходом первого усилителя второй промежуточной частоты, второй вход блока регулируемой задержки соединен с выходом фазового манипулятора, а выход подключен к индикатору дальности, первый вход перемножителя второго блока корреляционной обработки соединен с выходом второго усилителя второй промежуточной частоты, второй вход блока регулируемой задержки соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к индикатору азимута, первая и вторая приемные антенны разнесены на расстояние d, где d - измерительная база.
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278048C1 |
| СПОСОБ РАДИОСВЯЗИ | 2005 |
|
RU2297100C1 |
| WO 03003613 A1, 09.01.2003 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |

