Изобретение относится к системам управления и может быть использовано для контроля положения подвижных железнодорожных составов.
Известна система контроля положения подвижных объектов, например подвижного железнодорожного состава [1], в которой вдоль пути следования подвижного объекта развернута линия индуктивной радиосвязи, имеющая N (где N>>3) проводников с периодом повторения Р, расположенных со сдвигом P/N. На каждый проводник подают N-фазный электрический ток с прямой или обратной последовательностью фаз. Две транспортные антенны подвижного объекта, расположенные на некотором расстоянии друг от друга вдоль линии радиосвязи, принимают от нее сигналы. По сдвигу фаз принимаемых сигналов определяют положение подвижного объекта. В системе линия радиосвязи разделена на небольшие интервалы, соответствующие интервалам, на которые разделен весь путь следования объекта. На каждом интервале периоды повторения отличаются [1].
Известна система контроля положения подвижных объектов, содержащая n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, аппаратуры потребителя (далее в материалах заявки названной приемником спутниковых сигналов), вычислительного блока, модулятора, передатчика и передающей антенны, вычислителя параметра (далее в материалах заявки названного вычислителем эталонных значений радионавигационных параметров), соединенного с вторым входом вычислительного блока, аппаратуру подвижного объекта, состоящую из последовательно соединенных первой приемной антенны, приемника спутниковых сигналов и корректора параметра (далее в материалах заявки названного вычислительным блоком), выход которого соединен с информационным входом приемника спутниковых сигналов, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом вычислительного блока [2, рис.20.3].
Недостатком данной системы контроля положения объектов является отсутствие возможности определения с высокой точностью уклонов железнодорожного пути.
В основу изобретения положена задача повышения точности определения уклонов железнодорожного пути при движении железнодорожных составов.
Поставленная задача решается тем, что в устройство для контроля положения железнодорожных составов, содержащее n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, приемника спутниковых сигналов, вычислительного блока, модулятора, передатчика и передающей антенны, вычислителя эталонных значений радионавигационных параметров, соединенного со вторым входом вычислительного блока, и локомотивную станцию, содержащую последовательно соединенные первую приемную антенну, первый приемник спутниковых сигналов и вычислительный блок, последовательно соединенные вторую приемную антенну, приемник и демодулятор, выход которого соединен со вторым входом вычислительного блока, согласно изобретению в локомотивную станцию введены последовательно соединенные третья приемная антенна и второй приемник спутниковых сигналов, выход которого соединен с третьим входом вычислительного блока, блок сопряжения, вход которого соединен с выходом вычислительного блока, а выход блока сопряжения соединен с системой управления локомотива, причем первая и третья приемные антенны расположены параллельно продольной оси локомотива на одинаковой высоте.
Изобретение поясняется прилагаемыми чертежами, на которых представлены фиг. 1 - структурная схема устройства для контроля положения железнодорожных составов, фиг. 2 - схема размещения аппаратуры на локомотиве, фиг.3 - схема варианта вычислительного блока; фиг.4 - блок-схема алгоритма вычислительного блока локомотивной станции.
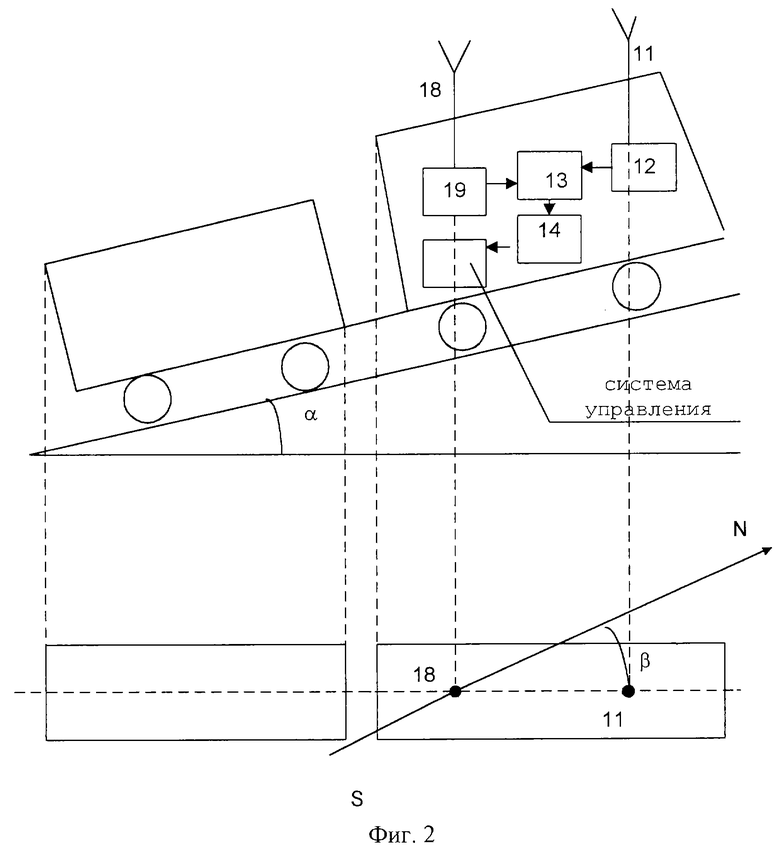
Устройство для контроля положения железнодорожных составов (фиг.1) содержит n навигационных спутников 11, 12...1n, контрольно-корректирующую станцию 2, содержащую последовательно соединенные приемную антенну 3, приемник спутниковых сигналов 4, вычислительный блок 5, модулятор 6, передатчик 7 и передающую антенну 8, а также вычислитель эталонных значений радионавигационных параметров 9, соединенный с вычислительным блоком 5, и локомотивную станцию 10, включающую последовательно соединенные первую приемную антенну 11, первый приемник спутниковых сигналов 12, вычислительный блок 13 и блок сопряжения 14, последовательно соединенные вторую приемную антенну 15, приемник 16 и демодулятор 17, выход которого соединен со вторым входом вычислительного блока 13, и последовательно соединенные третью приемную антенну 18 и второй приемник спутниковых сигналов 19, выход которого соединен с третьим входом вычислительного блока 13, причем первая 11 и третья 18 приемные антенны расположены параллельно продольной оси локомотива на одинаковой высоте.
Устройство работает следующим образом.
Контрольно-корректирующая станция 2 антенной 3 принимает сигналы навигационных спутников 11-1n, определяет радионавигационные параметры  по каждому из спутников. С приемника спутниковых сигналов 4 измеренные значения радионавигационных параметров
по каждому из спутников. С приемника спутниковых сигналов 4 измеренные значения радионавигационных параметров  поступают на вход вычислительного блока 5, второй вход которого соединен с вычислителем эталонных значений радионавигационных параметров 9, определяющим эталонные значения радионавигационных параметров R1(3) - Rn(3) на основе эталонных координат фазового центра антенны 3 ХКСЭ, YКСЭ, ZКСЭ и эфемерид Хэф1-Хэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из спутников. Вычислительный блок 5 вырабатывает значения поправок радионавигационных параметров по каждому из спутников в соответствии с алгоритмом [2, стр.288]:
поступают на вход вычислительного блока 5, второй вход которого соединен с вычислителем эталонных значений радионавигационных параметров 9, определяющим эталонные значения радионавигационных параметров R1(3) - Rn(3) на основе эталонных координат фазового центра антенны 3 ХКСЭ, YКСЭ, ZКСЭ и эфемерид Хэф1-Хэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из спутников. Вычислительный блок 5 вырабатывает значения поправок радионавигационных параметров по каждому из спутников в соответствии с алгоритмом [2, стр.288]:
где i=1,..., n - текущий номер спутника.
С выхода вычислительного блока 5 сигналы, в которых содержится информация о номере спутника, времени приема навигационного сигнала, поправках к радионавигационным параметрам до каждого спутника ΔR1-ΔRn поступают на модулятор 6. С выхода модулятора 6 сигналы поступают на передатчик 7, где преобразуются, усиливаются и излучаются в пространство антенной 8.
Одновременно сигналы навигационных спутников 11 - 1n принимаются антеннами 11 и 18, подключенными соответственно к входу первого 12 и второго 19 приемников спутниковых сигналов, производящих определение радионавигационных параметров  С выхода приемников спутниковых сигналов 12 и 19 информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров
С выхода приемников спутниковых сигналов 12 и 19 информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров  поступает в вычислительный блок 13.
поступает в вычислительный блок 13.
Сигналы контрольно-корректирующей станции 2 принимаются антенной 15 локомотивной станции 10, поступают на вход приемника 16, в котором происходит усиление, преобразование и выделение сигналов контрольно-корректирующей станции 2. С выхода приемника 16 сигналы поступают на вход демодулятора 17, выделяющего из сигналов информацию о номере спутника, времени приема сигнала и поправках радионавигационных параметров ΔRi - ΔRn, сформированных вычислительным блоком 5 контрольно-корректирующей станции 2.
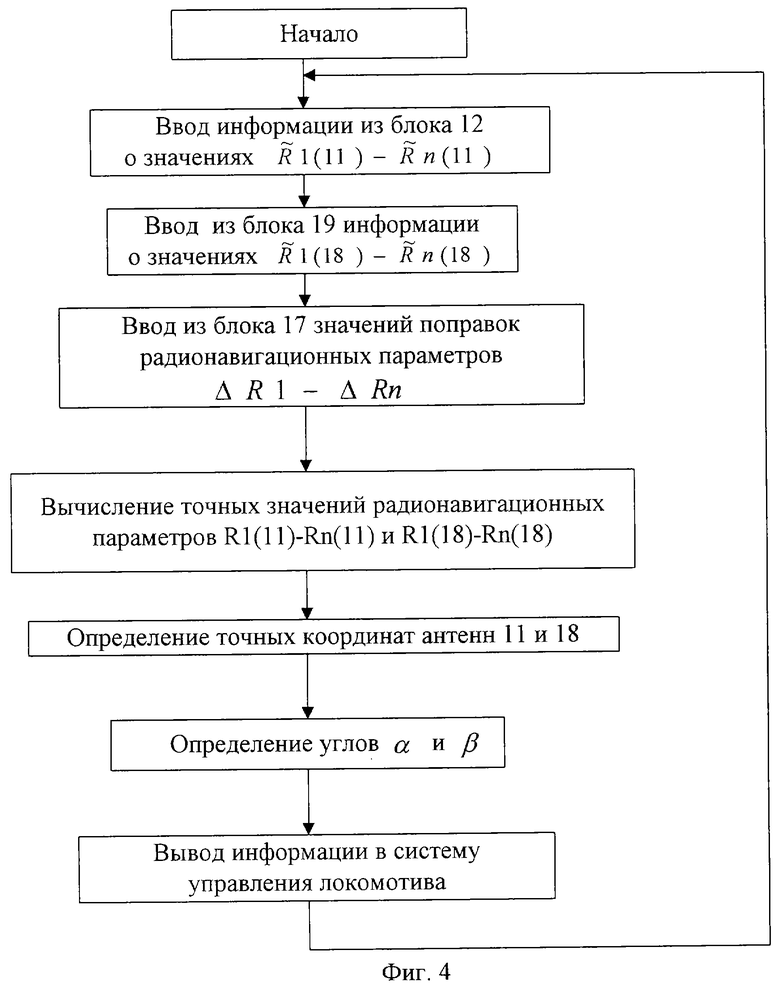
Вычислительный блок 13 выполняет циклическую обработку вводимой информации в соответствии с блок-схемой алгоритма, приведенной на фиг.4.
После ввода информации из блоков 17, 12 и 19 вычислительный блок 13 выполняет коррекцию радионавигационных параметров  измеренных первым и вторым приемниками спутниковых сигналов 12 и 19 в соответствии с [2, стр.288]:
измеренных первым и вторым приемниками спутниковых сигналов 12 и 19 в соответствии с [2, стр.288]:
В результате этой коррекции получают точные значения радионавигационных параметров R1(11) - Rn(11) и R1(18) - Rn(18), которые используют для вычисления точных координат антенн 11 и 18. В случае использования в качестве радионавигационных параметров результатов измерений псевдодальностей для определения координат антенн может применяться алгоритм, приведенный, например, в [2, стр.230-231].
Антенны 11 и 18 расположены параллельно продольной оси локомотива на одинаковой высоте (фиг. 2), что позволяет определить угол α - уклон железнодорожного пути, (вертикальный профиль пути) и β - горизонтальный профиль пути (угол между продольной осью локомотива и направлением на север) по разностям радионавигационных параметров R1(11) - Rn(18), Rn(11) - Rn(18).
Алгоритм вычисления углов α и β в случае использования в качестве радионавигационных параметров расстояний с учетом фаз несущих частот, принимаемых со спутников сигналов, приведен, например, в [3, с.78-80].
Вычислительный блок 5, 13 может быть реализован как на элементах "жесткой" (непрограммированной) логики, так и на основе микропроцессора по типовой структуре, описанной, например, в [4] на с.203.
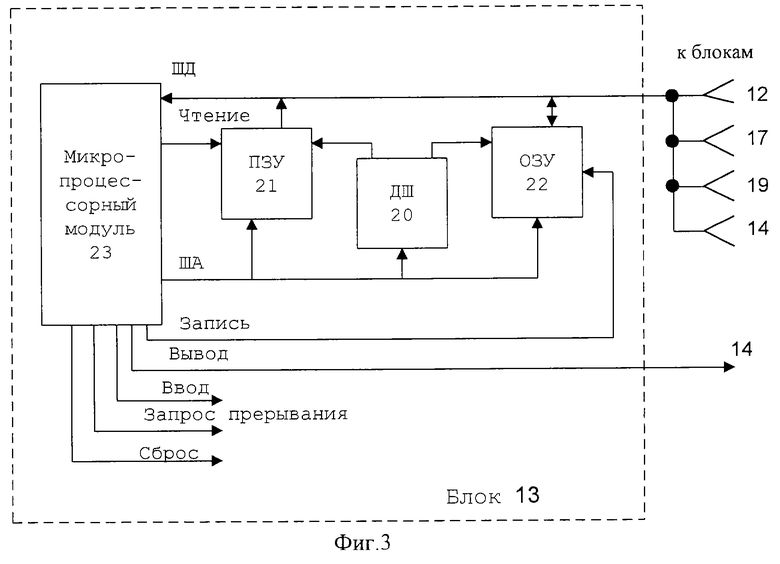
Структурная схема варианта вычислительного блока 5, 13 приведена на фиг. 3. Дешифратор 20 обеспечивает выбор постоянного 21 или оперативного 22 запоминающих элементов, в которых хранятся программы, константы или текущая информация соответственно. Микропроцессорный модуль 23 выполняет обработку и обмен информацией в соответствии с блок-схемой (фиг.4) и связан с блоками 20-22 шиной адреса (ША) и информационной шиной данных (ШД), может иметь управляющие выходы с сигналами "чтение" и "запись" для управления постоянным 21 и оперативным 22 запоминающими элементами соответственно, "вывод" - например, для вывода информации по шине ШД в блок 14, вход "запрос прерывания" для ввода информации в микропроцессорный модуль 23 от блоков 12, 17, 19.
При реализации вычислительного блока 5, 13 на базе микропроцессора К 580 микропроцессорный модуль 23 состоит из трех интегральных схем - центрального процессора К 580 И К 80, системного контроллера К 580 ВК 88, тактового генератора К 580 ГФ 24.
Приемники спутниковых сигналов 4, 12 и 19 могут быть выполнены в соответствии с рис. 1.14 [5], рис.9.5 [2]. Варианты реализации отдельных блоков аппаратуры, расположенной на локомотиве и контрольно-корректирующей станции описаны, например, в [2, 3, 5].
Длительность цикла работы устройства выбирается таким образом, чтобы успевали выполняться прием, измерения, передача навигационной и измерительной информации.
Рассмотрим числовой пример применения предлагаемого устройства для контроля уклона железнодорожного пути при движении железнодорожного состава.
Пусть в качестве навигационных спутников используются, например, спутники системы ГЛОНАСС. Тогда одновременный прием сигналов в точках 3, 11, 18 позволяет определить координаты локомотива и контрольно-корректирующей станции. Если считать координаты контрольно-корректирующей станции известными, например, с погрешностью менее 10 см, то по ее сигналам путем коррекции радионавигационных параметров координаты точек 11, 18 также будут определены с погрешностью около 10 см, обусловленной погрешностью задания координат контрольно-корректирующей станции 2.
При этом аппаратурная погрешность измерений фазовых сдвигов на несущих частотах системы ГЛОНАСС в диапазоне частот 1600 МГц составит Δϕ≈0,01 фц (<4o). Исходя из этого величина погрешности определения углов α и β может быть определена по приближенной формуле
где λ - длина волны принятых сигналов, для несущей частоты, равной ~1600 МГц, составляет 0,19 м; В - расстояние между антеннами 11 и 18, расположенными, например, вдоль продольной оси локомотива. При В=10 м погрешность измерения уклонов железнодорожного пути и горизонтального профиля пути составит Δ≈1 угловая минута. Данная информация позволяет управлять силовой установкой локомотива в реальном масштабе времени с высокой точностью в зависимости от профиля пути.
Таким образом предлагаемое техническое решение позволяет повысить точность определения положения железнодорожных составов.
Литература
1. JP, заявка, 62-44226, G 01 S 1/00, В 61 L 25/02, 1987.
2. Сетевые спутниковые радионавигационные системы./ Под ред. В.С. Шебшаевича. 2-е изд., перераб. и доп. - М.: Радио и связь, 1993, с.283-288.
3. Глобальная спутниковая навигационная система ГЛОНАСС / Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. - М., ИПРЖР, 1998. - 40с.: ил.
4. Балашов Е.П., Пузенков Д.В. Микропроцессоры и микропроцессорные системы. - М.: Радио и связь, 1990.
5. Цифровые радиоприемные системы. / Под ред. Жодзишского. - М.: Радио и связь, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| НАВИГАЦИОННОЕ КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЛОКОМОТИВОВ-РЕЛЬСОСМАЗЫВАТЕЛЕЙ | 2009 |
|
RU2394716C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2002 |
|
RU2272731C2 |
| СИСТЕМА ДЛЯ СОЗДАНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2195408C1 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ РЕМОНТНЫХ БРИГАД | 2003 |
|
RU2268836C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
Использование: в системах управления для контроля положения железнодорожных составов. Технический результат - повышение точности определения уклонов железнодорожного пути, он достигается тем, что в локомотивную станцию устройства введены последовательно соединенные третья приемная антенна и второй приемник спутниковых сигналов, выходом соединенный с третьим входом вычислительного блока, и блок сопряжения, вход которого соединен с выходом вычислительного блока, а выход блока сопряжения соединен с системой управления локомотива. 4 ил.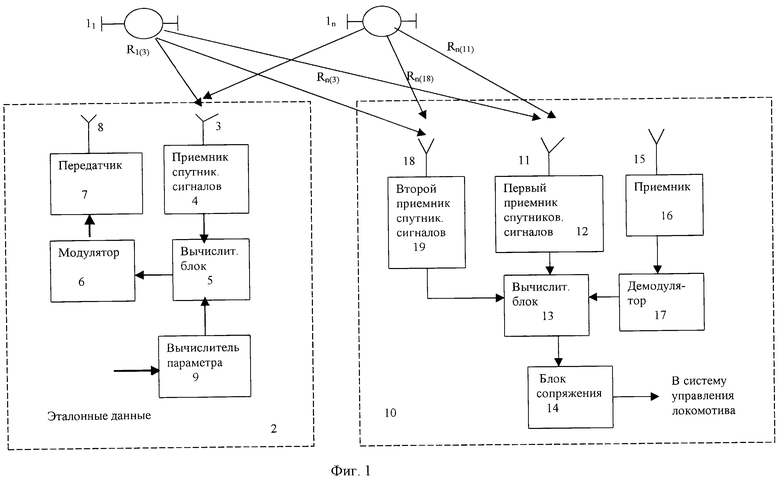
Устройство для контроля положения железнодорожных составов, содержащее n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, приемника спутниковых сигналов, вычислительного блока, модулятора, передатчика и передающей антенны, вычислителя эталонных значений радионавигационных параметров, соединенного со вторым входом вычислительного блока, и локомотивную станцию, состоящую из последовательно соединенных первой приемной антенны, первого приемника спутниковых сигналов и вычислительного блока, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом вычислительного блока, отличающееся тем, что в локомотивную станцию введены последовательно соединенные третья приемная антенна и второй приемник спутниковых сигналов, выходом соединенный с третьим входом вычислительного блока, блок сопряжения, вход которого соединен с выходом вычислительного блока, а выход блока сопряжения соединен с системой управления локомотива, причем первая и третья приемные антенны расположены параллельно продольной оси локомотива на одинаковой высоте.
| ШЕБШАЕВИЧ В.С | |||
| Сетевые спутниковые радионавигационные системы | |||
| Изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Радио и связь, 1993, стр.283-288 | |||
| DE 19636108 A1, 12.03.1998 | |||
| Устройство для измерения углов наклона | 1979 |
|
SU1075996A3 |
| Устройство для завертывания штучных изделий с отверстием | 1980 |
|
SU950598A2 |
| US 5129602 A, 14.07.1992. | |||

