Область техники
Изобретение относится к атомной энергетике, а более конкретно - к автоматическому управлению мощностью ядерной энергетической установкой с реактором водо-водяного типа.
Уровень техники
Известен способ управления реакторной установкой в режимах регулирования электрической нагрузки энергоблока атомной станции, когда поддерживается заданное давление пара, при этом используется сигнал по мощности реактора, сигнал по давлению пара во втором контуре и сигнал по мощности турбины или сигнал, характеризующий мощность турбины (расход пара на турбину, положение регулирующих клапанов турбины и т.д.) (М.П.Шальман, В.И.Плютинский «Контроль и управление на атомных электростанциях». М: Энергия, 1979 г.; рис.6-8 а, стр.146) - принят за прототип. Критерием качества управления известного способа является минимизация отклонения давления пара во втором контуре от заданного значения и минимизация времени переходного процесса.
Недостатком известного способа является следующее.
Ухудшаются условия работы тепловыделяющих элементов активной зоны вследствие существенных изменений локального энерговыделения, вызванного, в свою очередь, перемещением органов регулирования системы управления и защиты реактора.
Известен способ управления реактором в режимах регулирования нагрузки с использованием сигнала «средняя температура теплоносителя в 1-м контуре» (М.П.Шальман, В.И.Плютинский «Контроль и управление на атомных электростанциях». М: Энергия, 1979 г.; рис.6-8 б, стр.146). Критерием качества управления известного способа является минимизация отклонения от заданного значения средней температуры теплоносителя в 1-м контуре. Применение данного способа позволяет улучшить условия работы тепловыделяющих элементов в режимах регулирования нагрузки за счет использования свойств саморегулирования реактора. Недостатком известного способа является ограниченный диапазон мощности реактора (от не менее 60% Nном. до Nном., где Nном. - номинальный уровень мощности равный 100%), в котором этот способ может быть реализован. Это ограничение вызвано увеличением давления пара во втором контуре в стационарном состоянии, что, в свою очередь, вызвано ограничениями со стороны турбины и со стороны реакторной установки. Дополнительным недостатком известного способа является изменение коэффициента полезного действия паротурбинной установки при изменении мощности, вызывающей изменение давления пара в стационарном состоянии.
Еще одним недостатком известных способов является то, что вследствие изменения динамических характеристик объекта управления требуется изменение параметров настроек (коэффициенты усиления, постоянные времени). Изменение динамических характеристик объекта управления - реакторной установки происходит в зависимости от периода кампании реактора (изменяется, в том числе, коэффициент реактивности по температуре (или по плотности) теплоносителя и коэффициент по температуре топлива) и в зависимости от величины и вида возмущения (от скорости, направления, величины изменения электрической нагрузки).
Раскрытие изобретения
Задачей изобретения является улучшение условий работы тепловыделяющих элементов активной зоны за счет исключения движения органов регулирования системы управления и защиты реактора вверх при снижении мощности турбины и, как следствие, повышение экономичности и безопасности ядерного реактора.
Техническим результатом изобретения является улучшение условий работы тепловыделяющих элементов активной зоны путем минимизации перемещения органов регулирования системы управления и защиты за счет максимального использования свойств саморегулирования реактора в режимах регулирования нагрузки в широком диапазоне мощности реактора (от 10% до 102% Nном.) при одновременном выполнении требования по поддержанию заданного давления пара. Минимизацию перемещения органов регулирования системы управления и защиты обеспечивают исходя из выполнения следующего условия:
[Нуст.-Н(t)]·dH(t)/dt≥0, для [dNтг(t)/dt]·[dNтг(t)/dt]≥0,
где Нуст. - положение органов регулирования системы управления и защиты в конце процесса регулирования (стабилизация давления пара во втором контуре на заданном уровне).
H(t) положение органов регулирования системы управления и защиты от низа активной зоны.
При скачкообразных увеличениях нагрузки данное условие может нарушаться в целях недопущения снижения давления пара до значений, при которых начинают срабатывать технологические защиты и блокировки.
Поставленная задача заключается в использовании способа автоматического управления мощностью ядерной энергетической установки с реактором водо-водяного типа при изменении внешней электрической нагрузки, включающего поддержание заданного давления пара по информации о текущей мощности турбины, по информации о текущем давлении пара, по информации о текущей мощности реактора путем перемещения органов регулирования системы управления и защиты, и для поддержания заданного давления пара управление упомянутой установки осуществляют следующими операциями:
- определяют скорость изменения мощности турбины в результате преобразования сигнала по мощности турбины в динамическом элементе с передаточной функцией
W(P)=К4·P/(Т4·Р+1), где
К4 - коэффициент с возможными значениями от 0 до 100,
P - оператор Лапласа.
Т4 - постоянная времени с возможными значениями от 0 до 100
Динамический элемент - элемент (аппаратура или программный модуль), реализующий передаточную функцию W(P), для которого, выходная величина является (функцией двух переменных: входной величины и времени. Величина коэффициентов К4, Т4 определяется совокупностью следующих факторов: требования энергосистемы по скорости, диапазону и величине увеличения мощности энергоблока; динамические характеристики объекта управления (нейтронно-физические характеристики - коэффициенты реактивности но температуре топлива и температуре теплоносителя, эффективность органов регулирования системы управления и защиты); тепловая инерционность парогенератора, 1-го контура; характеристики аппаратуры, реализующей алгоритм динамического элемента (коэффициенты передачи измерительных каналов, коэффициенты преобразования и усиления сигналов). По результатам анализа расчетных исследований на полномасштабных математических моделях, экспериментальных исследований значения данных коэффициентов не могут превышать значение 100 и не могут быть менее 0,
и далее выбирают необходимую операцию:
или,
- при увеличении мощности турбины органы регулирования перемещают вверх при выполнении условия
[(Рзад.-Рпара)·К1+(Ктг-Np-ра)+K5]>0, где
Pзад - заданное давление пара, Па;
Рпара - давление пара, Па;
K1 - коэффициент с возможными значениями от 0 до 1;
Nтг - мощность турбины, %;
Np-pa - мощность реактора, %;
К5 - коэффициент с возможными значениями от 0 до 100.
Коэффициенты К1 и K5 обозначают следующее: коэффициент К1 - множитель (масштабный фактор), коэффициент К5 - дополнительное слагаемое. Величина коэффициентов К1, К5 определяется совокупностью следующих факторов: требования энергосистемы по скорости, диапазону и величине увеличения мощности энергоблока; динамические характеристики объекта управления (нейтронно-физические характеристики - коэффициенты реактивности по температуре топлива и температуре теплоносителя, эффективность органов регулирования системы управления и защиты); тепловая инерционность парогенератора, 1-го контура; характеристики аппаратуры, реализующей алгоритм динамического элемента (коэффициенты передачи измерительных каналов, коэффициенты преобразования и усиления сигналов).
По результатам анализа расчетных исследований на полномасштабных математических моделях, экспериментальных исследовании значения данных коэффициентов не могут превышать значение 100 и не могут быть менее 0,
или,
- при превышении абсолютного значения разности мощности реактора и мощности турбины на величину более К6, и при одновременном отсутствии увеличения мощности турбины органы регулирования перемещают при выполнении условия [Nтг-Np-pa|≥K6, направление перемещения органов регулирования определяют по знаку разности
Nтг-Np-pa,
где К6 - коэффициент с возможными значениями от 0 до 100.
Коэффициент К6 обозначает границу абсолютного значения разности мощности реактора и мощности турбины. Значение К6 определяется совокупностью следующих факторов: тепловыми потерями в окружающую среду, мощностью, подводимую к 1 контуру за счет работы главных циркуляционных насосов, отбором тепла по 2 контуру на собственные нужды. По результатам анализа расчетных исследований на полномасштабных математических моделях, экспериментальных исследований значения данных коэффициентов не могут превышать значение 100 и не могут быть менее 0,
или,
- при отклонении мощности реактора от мощности турбины в пределах от минус К6 до плюс К6 при одновременном отсутствии увеличения мощности турбины направление перемещения органов регулирования определяют знаком разности (Рзад.-Pпара), причем время перемещения органов регулирования определяют исходя из выполнения условия:
(Рзад.-Рпара)-К2·(1-exp(-t/T2))·(Рзад.-Рпара)//Рзад.-Рпара|≥Δн, где
t - время,
К2 - коэффициент с возможными значениями от 0 до 100,
Т2 - постоянная времени с возможными значениями от 0 до 106,
Δн - зона нечувствительности функции трехпозиционною релейного элемента с возможными значениями от 0 до 106,
а время паузы между шагами органов регулирования определяют исходя из выполнения условия:
(Рзад.-Рпара)-К3·(1-exp(-t/Т3))·(Рзад.-Рпара)/|Рзад.-Рпара|≤Δв, где
t - время,
К3 - коэффициент с возможными значениями от 0 до 100,
T3 - постоянная времени с возможными значениями от 0 до 106,
Δв - зона возврата функции трехпозиционного релейного элемента с возможными значениями от 0 до 106.
Коэффициенты К2 и К3 обозначают коэффициенты передачи инерционного звена 1-го порядка. К2 и T2 обозначают постоянные времени инерционного звена 1-го порядка. Величины коэффициентов К2 и Т2 определяются исходя из того, что при любых возможных отклонениях текущего давления пара (Pпара) от заданного значения (Рзад.) орган регулирования системы управления и защиты делает один шаг, например 2 см. Величины коэффициентов К3 и Т3 определяются исходя из того, что сигнал (Рзад-Рпара) на входе в трехпозиционный релейный элемент должен быть скомпенсирован сигналом обратной связи в течение времени, которое необходимо для реализации свойств саморегулирования объекта управления. По результатам анализа расчетных исследований на полномасштабных математических моделях, экспериментальных исследований значения коэффициентов К2 и К3 не могут превышать 100 и не могут быть менее 0, значения Т2 и Т3 не могут превышать 106 и не могут быть менее 0.
Величина зоны нечувствительности определяется, исходя из требований по точности поддержания регулируемой величины в стационарном состоянии, требований к качеству переходного процесса.
Величина зоны возврата определяется, исходя из требований к качеству переходного процесса. По результатам анализа расчетных исследований на полномасштабных математических моделях, экспериментальных исследований значения зоны нечувствительности и зоны возврата не могут превышать 106 и не могут быть менее 0.
Технический результат достигается тем, что отклонение давления пара от номинального значения (от заданного значения) в режимах регулирования нагрузки определяют соотношением подводимой ко второму контуру мощности и отводимой мощности на турбину, то есть при больших возмущениях по нагрузке в сторону снижения мощности турбины мощность реактора приводится в соответствии с мощностью турбины с точностью до К6% Nном. Затем, при отклонении мощности реактора от мощности турбины в пределах от -К6% Nном. до +К6% Nном. и при отсутствии увеличения мощности турбины управление реактором производят таким образом, что пауза между перемещениями позволяла бы реализовывать свойства саморегулирования реактора в полной мере. Время паузы определяется характеристиками саморегулирования энергоблока АЭС.
Сущность изобретения поясняется чертежами.
На фиг.1 представлена схема способа автоматического управления мощностью ядерной энергетической установки с реактором водо-водяного типа.
Управление ядерной энергетической установкой (ЭУ) 11 осуществляют путем перемещения органов регулирования системы управления и защиты реактора (ОР СУЗ) 2.
Блок переключения 7 осуществляет выбор управляющего сигнала в зависимости от величины отклонения мощности реактора от мощности турбогенератора и в зависимости от знака скорости изменения мощности турбины. При увеличении мощности турбогенератора управление передают сигналу В, который равен сумме сигналов (Nтг-Np-pa) и (Рзад.-Рпара), при этом существует ограничение на увеличение мощности реактора более допустимого значения, которое определяют в проекте по условиям безопасной эксплуатации. При наличии рассогласования мощности реактора от мощности турбогенератора по абсолютному значению на величину более К6% (формируют с помощью функции релейного элемента 1) и отсутствии увеличения мощности турбогенератора управление осуществляют по сигналу А (релейный алгоритм). В случае, когда отклонение мощности реактора от мощности турбогенератора находится в пределах от минус К6% до плюс К6% при одновременном отсутствии увеличения мощности турбины управление осуществляют по сигналу С (совместно с исполнительным механизмом постоянной скорости реализуют ПИ-алгоритм (пропорционально-интегральный)).
Реализацию ПИ-алгоритма осуществляют за счет охвата выходного трехпозиционного релейного элемента 8 отрицательной обратной связью с характеристиками инерционного звена первого порядка 9.
Управление турбиной 3 осуществляют системой управления турбиной (СУТ) 4, 5, 10, функционирующей в режиме поддержания мощности турбины и воздействующей на регулирующие клапаны (РК) 6.
Работоспособность данного способа поясняется на следующем примере.
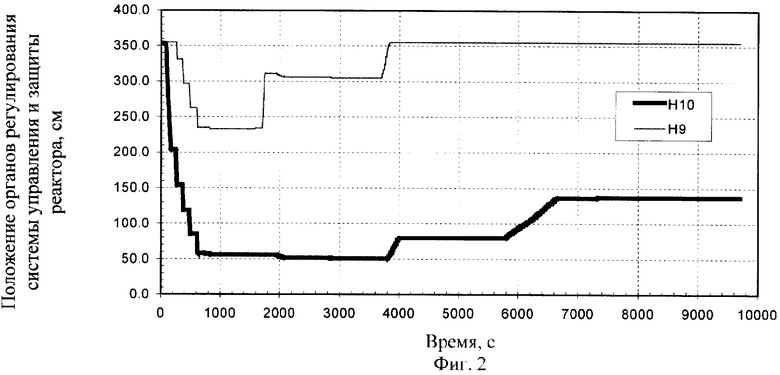
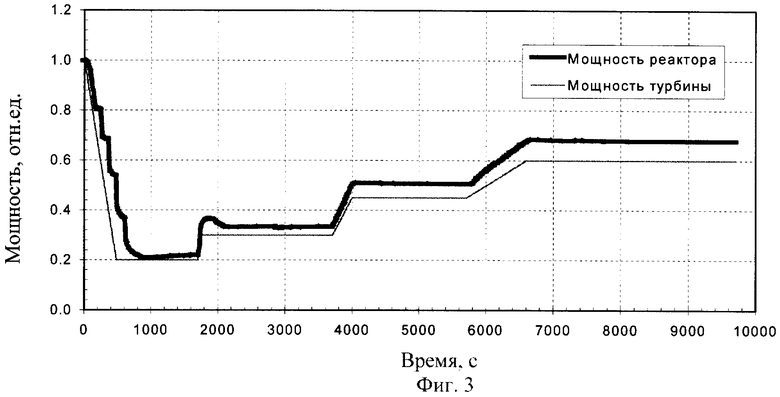
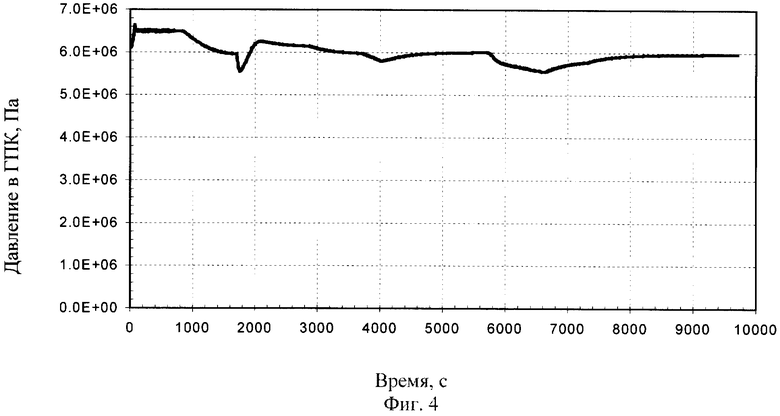
На математической модели энергоблока АЭС с ВВЭР, реализующей двухжидкостную модель теплогидравлики и верифицированной по результатам динамических испытаний при вводе АЭС с ВВЭР в эксплуатацию, были проведены расчетные анализы режимов с изменением мощности турбины с применением данного способа управления мощностью ядерной энергетической установкой. Результаты моделирования представлены в виде графиков (фиг.2, 3, 4) изменения основных технологических параметров для следующих значений параметров способа управления (К1=10-5; К5=3; К6=6; К2=3·10-6; К3=3·10-6; К4=3; T3=750 с; Т2=2,5 с; T4=100 с; Δв=0,025; Δн=0,05).
На фиг.2 представлено положение органов регулирования системы управления и защиты реактора.
На фиг.3 представлено изменение мощности реактора и турбины во времени.
На фиг.4 представлено изменение давления в главном паровом коллекторе (ГПК).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА ВОДО-ВОДЯНОГО ТИПА В РЕЖИМЕ ПРОДЛЕНИЯ КАМПАНИИ | 1996 |
|
RU2095864C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЯДЕРНОГО РЕАКТОРА | 2003 |
|
RU2244350C2 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| Способ автоматического управления процессом эпоксидирования пропилена гидроперекисью этилбензола | 1990 |
|
SU1797604A3 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОЦЕНКИ И РЕГУЛИРОВАНИЯ ПОТРЕБНОЙ МОЩНОСТИ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ГОРОДСКОГО ЭЛЕКТРОТРАНСПОРТА | 2005 |
|
RU2292273C1 |
| УСТРОЙСТВО АВАРИЙНОЙ ЗАЩИТЫ АТОМНОГО РЕАКТОРА | 1991 |
|
SU1828241A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ОЧИСТКИ ВОДЫ С НЕПРЕРЫВНЫМ КОНТРОЛЕМ ЕЕ КАЧЕСТВА В РАЗЛИЧНЫХ ТОЧКАХ ТЕХНОЛОГИЧЕСКОЙ СХЕМЫ | 2011 |
|
RU2472717C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РИСКА РАЗВИТИЯ ТУБЕРКУЛЕЗА ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ У БОЛЬНЫХ С ВИЧ-АССОЦИИРОВАННЫМ ТУБЕРКУЛЕЗОМ ОРГАНОВ ДЫХАНИЯ | 2011 |
|
RU2487355C1 |
| Способ управления автономной двухконтурной ядерной энергетической установкой | 2017 |
|
RU2669389C1 |
| СПОСОБ ПАРАКЛИНИЧЕСКОЙ ОЦЕНКИ ТЯЖЕСТИ ЭНДОТОКСИКОЗА ПРИ ПАТОЛОГИЧЕСКОМ ТЕЧЕНИИ БЕРЕМЕННОСТИ | 2001 |
|
RU2217752C2 |
Изобретение относится к атомной энергетике, а именно - к автоматическому управлению мощностью ядерной энергетической установкой с реактором водо-водяного типа. Способ автоматического управления мощностью ядерной энергетической установки с реактором ВВЭР в режимах регулирования электрической нагрузки в диапазоне 10%-102% номинальной мощности реактора предполагает, что управление упомянутой установкой осуществляют по следующим операциям: - определяют скорость изменения мощности турбины в результате преобразования сигнала по мощности турбины в динамическом элементе с передаточной функцией W(P)=K4·Р/(T4·Р+1), где P - оператор Лапласа, K4 - коэффициент с возможными значениями от 0 до 100, Т4 - постоянная времени с возможными значениями от 0 до 100, и далее выбирают необходимую операцию: или, - при увеличении мощности турбины органы регулирования перемещают вверх при выполнении условия: [(Рзад.-Рпара)·K1+(Nтг-Np-pa)+K5]>0, где Рзад. - заданное давление пара, Па; Рпара давление пара. Па; K1 - коэффициент с возможными значениями от 0 до 1; Nтг - мощность турбины, %; Np-pa - мощность реактора, %; К5 - коэффициент с возможными значениями от 0 до 100; или, - при превышении абсолютного значения разности мощности реактора и мощности турбины на величину более К6 и при одновременном отсутствии увеличения мощности турбины органы регулирования перемещают при выполнении условия |Nтг-Nр-pa|≥К6, где К6 - коэффициент с возможными значениями от 0 до 100. Направление перемещения органов регулирования определяют по знаку разности Nтг-Np-pa; или, - при отклонении мощности реактора от мощности турбины в пределах от -К6 до +К6 при одновременном отсутствии увеличения мощности турбины направление перемещения органов регулирования определяют знаком разности (Рзад.-Рпара), причем время перемещения органов регулирования определяют исходя из выполнения условия: (Рзад-Рпара)-K2·(1-exp(-t/T2))·(Рзад-Рпара)/|Рзад-Pпара|≥Δн, где t - время, К2 - коэффициент с возможными значениями от 0 до 100, Т2 - постоянная времени с возможными значениями от 0 до 106, Δн - зона нечувствительности функции трехпозиционного релейного элемента с возможными значениями от 0 до 10, а время паузы между шагами органов регулирования определяют исходя из выполнения условия: (Рзад-Рпара)-К3·(1-exp(-t/Т3))·(Рзад-Рпара)/|Рзад-Pпара|≤Δв, где t - время, К3 - коэффициент с возможными значениями от 0 до 100, Т3 - постоянная времени с возможными значениями от 0 до 10, Δв - зона возврата функции трехпозиционного релейного элемента с возможными значениями от 0 до 106. Управление в соответствии с вышеперечисленными операциями приводит к улучшению условий работы тепловыделяющих элементов активной зоны за счет использования свойств саморегулирования реактора путем минимизации перемещения органов регулирования системы управления и защиты. 4 ил.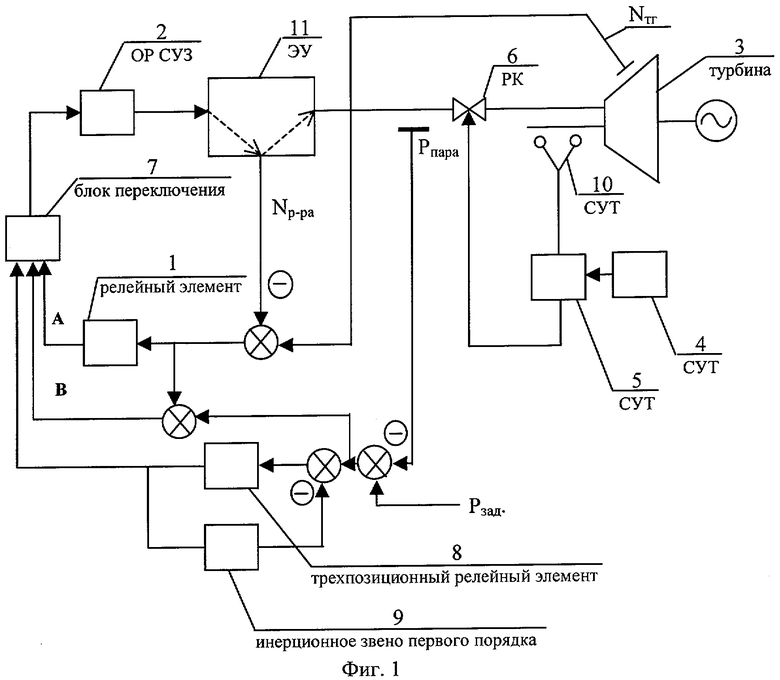
определяют скорость изменения мощности турбины в результате преобразования сигнала по мощности турбины в динамическом элементе с передаточной функцией
W(P)=К4·Р/(Т4·Р+1),
где P - оператор Лапласа;
К4 - коэффициент с возможными значениями от 0 до 100;
Т4 - постоянная времени с возможными значениями от 0 до 100;
и далее выбирают необходимую операцию или при увеличении мощности турбины органы регулирования перемещают вверх при выполнении условия:
[(Рзад.-Рпара)·К1+(NТГ-Np-pa)+K5]>0,
где Рзад. - заданное давление пара, Па;
Рпара давление пара, Па;
K1 - коэффициент с возможными значениями от 0 до 1;
NТГ - мощность турбины, %;
Np-pa - мощность реактора, %;
К5 - коэффициент с возможными значениями от 0 до 100,
или при превышении абсолютного значения разности мощности реактора и мощности турбины на величину более К6 и при одновременном отсутствии увеличения мощности турбины органы регулирования перемещают при выполнении условия
|NТГ-Np-pa|≥К6,
где К6 - коэффициент с возможными значениями от 0 до 100;
направление перемещения органов регулирования определяют по знаку разности NТГ-Np-pa,
или при отклонении мощности реактора от мощности турбины в пределах от -К6 до +К6 при одновременном отсутствии увеличения мощности турбины направление перемещения органов регулирования определяют знаком разности (Рзад-Рпара), причем время перемещения органов регулирования определяют, исходя из выполнения условия:
(Рзад-Рпара)-К2·(1-exp(-t/T2))·(Рзад-Рпара)/|Рзад-Рпара|≥Δн,
где t - время;
К2 - коэффициент с возможными значениями от 0 до 100;
Т2 - постоянная времени с возможными значениями от 0 до 106;
Δн - зона нечувствительности функции трехпозиционного релейного элемента с возможными значениями от 0 до 106,
а время паузы между шагами органов регулирования определяют, исходя из выполнения условия:
(Рзад-Рпара)-К3·(1-exp(-t/Т3))·(Рзад-Рпара)/|Рзад-Pпара|≥Δв,
где t - время;
К3 - коэффициент с возможными значениями от 0 до 100;
Т3 - постоянная времени с возможными значениями от 0 до 106;
Δв - зона возврата функции трехпозиционного релейного элемента с возможными значениями от 0 до 106.
[Нуст.-H(t)]·dH(t)/dt≥0, для [dNТГ(t)/dt]·[dNТГ(t)/dt]≥0,
где Нуст. - положение органов регулирования системы управления и защиты в конце процесса регулирования (стабилизация давления пара во втором контуре на заданном уровне);
H(t) - положение органов регулирования системы управления и защиты от низа активной зоны.
| ШАЛЬМАН М.П | |||
| и др | |||
| Контроль и управление на атомных электростанциях | |||
| - М.: Энергия, 1979, с.146 | |||
| Способ управления мощностью магнитно-вентильного реактора | 1989 |
|
SU1709406A1 |
| Способ автоматического управления многополочным реактором | 1979 |
|
SU897274A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВУХСТУПЕНЧАТЫМ РЕАКТОРОМ ДЕГИДРИРОВАНИЯ | 1998 |
|
RU2142447C1 |
| US 4150546 А, 24.04.1979 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН АВТОСТОПА | 2006 |
|
RU2326012C1 |

