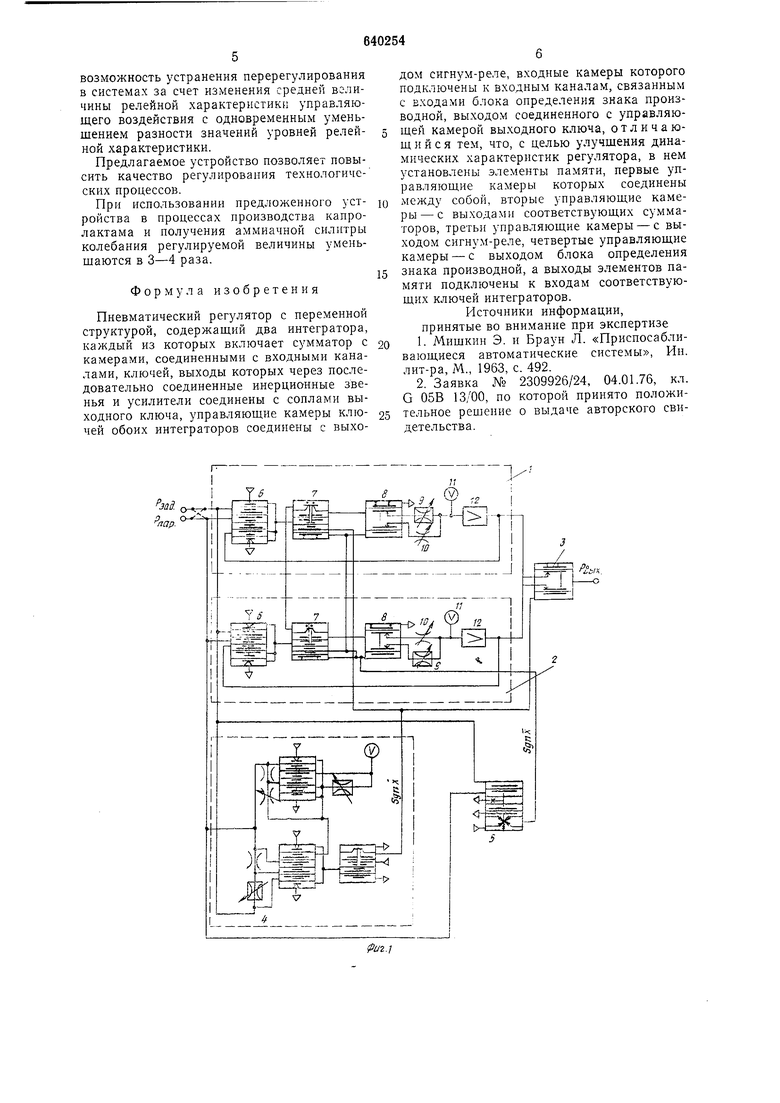
Изобретение относится к области пневматического приборостроения и может быть использовано при синтезе самонастраивающихся систем для автоматического управления технологическими процессами. Известна система управления скоростью в плоскости тангажа для истребителя, которая содержит вариатор коэффициента усиления, ограничитель, последовательно соединенные модель, элемент сравнения, блок логики, реле, ограничитель и фильтр, выход которого является выходом устройства, входы элемента сравнения соединены с выходом модели и входом «переменная устройства, а выход подключен к вариатору коэффициента усиления, ограничителя и к блоку логики . Известные устройства не пригодны для регулирования объектами с пневматическими исполнительными механизмами, так как средняя величина релейной характеристики у них постоянна, а меняется лишь разность значений уровней релейной характеристики. Известен также пневматический регулятор с переменной структурой, содержащий два интегратора, каждый из которых состоит из сумматора с камерами, соединенными с входными каналами, ключей, выходы которых через последовательно соединенные инерционные звенья и усилители соединены с соплами выходного ключа, управляющие камеры ключей обоих интеграторов соединены с выходом сигнум-реле, входные камеры которого подключены к входным каналам, связанным с входами блока определения знака производной, выход которого соединен с управляющей камерой выходного ключа 2J. Однако при отработке сложных входных воздействий при управлении колебательными объектами возможен срыв автоколебательного режима в известном регуляторе, что ухудщает его динамические характеристики. Целью изобретения является улучшение его динамических характеристик. Для этого в нем установлены элементы памяти, первые управляюшие камеры которых соединены между собой, вторые управляющие камеры - с выходами соответствующих сумматоров, третьи управляющие камеры- с выходом сигнум-реле, четвертые управляющие камеры - с выходом блока определения знака производной, а выходы элементов памяти подключены к входам соответствующих ключей интеграторов. На фиг. 1 - предлагаемый регулятор; на фиг. 2- график его работы.
Регулятор содержит два интегратора 1 и 2, выходной ключ 3, блок определения знака производной 4, сигнум-реле 5.
Входы интеграторов 1 и 2 соединены с входными каналами регулируемой величины Рпар. и задающего воздействия Рзад., а выходы с выходным ключом 3, связанным с выходным каналом устройства. Управляющая камера ключа 3 подсоединена к выходу блока определения знака производной 4, входы которого соединены с входными каналами Рпар. и Рзад..
Интегратор 1 включает сумматор 6, элемент палмяти 7, ключ 8, переменные дроссели 9 и 10, емкость 11, входящие в инерционное звено, и усилитель 12.
Интегратор 2 выполнен аналогично. Камеры сумматора 6 соединены с входными каналами Рпар. и Рзад. и с линией положительной обратной связи, а выход - с входом элемента памяти 7, одна из управляющих камер которого подсоединена к выходу блока определения знака производпой 4, а другая - к выходу сигнум-реле 5. Одпа из управляющих камер элемента памяти 7 соединена с аналогичной управляющей камерой элемента памяти / интегратора 2, а его выход соединен с входом ключа 8, связанным с двумя переменными дросселями 9, 10 и с емкостью И.
Регулятор работает следующим образом.
Сигналы, пропорциональные заданному Рзад. и текущему Рпар. значениям регулируемой величины, поступают на входы пнтсграторов 1 и 2, работающих в зависимости от состояния элементов памяти 7, управляемых сигпум-реле 5 и блоком 4, попеременно в режимах интегрирования и запоминания. При наличии ошибки рассогласования, когда значение ошибки положительное sign х 0 и значение производной ошибки тоже положительное signx 0 в момент времени (см. фиг. 2), работа интеграторов 1, 2 в соответствии с графиком (фиг. 2) определяется следующим законом;
1 Pu.U,(Q),
Pu.U,(t),
г а где Т
постоянная времени интеТ «
грирования; УИ - емкость 11; 79 - проводимость дросселя 9. В этот момент па иптеграторе 1 происходит процесс обычпого интегрирования ошибки рассогласования, выход интегратора 2 - постоянный. В момент времепи , когда
sign., а sign; ; 0, по каналу, соединяющему элементы памяти 7, происходит выравпивание давлений, пропорциональных
значениям уровней и РШ, согласно закону:
Т, L, им-им,
.(«J-.(«J,
т Vit где /4-постоянная времени инте7iiiA9
грирования; Vi4 - емкость 14; 7i6 - проводимость дросселя 16. Решая эту систему уравнений, получим:
Я..-Г, 1),1-е., + иМ
I т 4
р„ - 7 1 (ni)U2(ni) ., .-Л г X
,..J+i,-(.
X
где : - IL±I±, , т,т,
При отрицательном значении ошибки рассогласования, когда signA; 0 и signA: 0, момент времени , работа интеграторов будет определяться следующим выражением:
30Pu,ui(t),
«3
PU. и (ftj + xd(,
2 J
1/1Я
где Т, - ,
При signx 0 и signA; 0 в момент времени , будет происходить выравпивапис давлений, пропорциопальных значениям уровней PJ/I и PUZ, по каналу, соедл;лпощему элемеиты памяти 7 согласпо выражению:
. - Т, .L (1 ,.. + ,),
3 + 2
1(3)
X
Тз+Т, Тз+Т,
).(«J.
где q . t
УзТ-,
Таким образом, регулятор формулирует управляющее воздействие из двух уровней, разность значений которых уменьшается при движении параметра к линии задания
(sign А: signx 0), и увеличивается при отклонении параметра от линии задания
(sign Л signx 0), при этом изменяется выход того интегратора, который соединен с выходным каналом устройства, а выход другого запомнен, этпм самым достигается
возможность устранения перерегулирования в системах за счет изменения средней воличины релейной характеристики управляющего воздействия с одновременным yiMeHbшением разности значений уровней релейной характеристики.
Предлагаемое устройство нозволяет повысить качество регулирования технологических нроцессов.
При использовании предложенного устройства в процессах производства капролактама и получения аммиачной силитры колебания регулируемой величины уменьшаются в 3-4 раза.
Формула изобретения
Пневматический регулятор с переменной структурой, содержащий два интегратора, каждый из которых включает сумматор с камерами, соединенными с входными каналами, ключей, выходы которых через последовательно соединенные инерционные звенья и усилители соединены с соплами выходного ключа, управляющие камеры ключей обоих интеграторов соединены с выхоРзаЗ.
0-
пар.
дом сигнум-реле, входные камеры которого подключены к входным каналам, связанным с входами блока определения знака производной, выходом соединенного с управляющей камерой выходного ключа, отличающийся тем, что, с целью улучшения динамических характеристик регулятора, в нем установлены элементы памяти, первые уп равляющие камеры которых соединены
между собой, вторые управляющие камеры- с выходами соответствующих сумматоров, третьи управляющие камеры - с выходом сигнум-реле, четвертые управляющие камеры - с выходом блока определения
знака производной, а выходы элементов памяти подключены к входам соответствующих ключей интеграторов.
Источники информации, принятые во внимание при экспертизе
1. Мишкин Э. и Браун Л. «Приспосабливающиеся автоматические системы, Ин. лит-ра, М., 1963, с. 492.
2. Заявка № 2309926/24, 04.01.76, кл. G 05В 13/00, по которой принято положительное решение о выдаче авторского свидетельства.
я, п п
г JЙг/2.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| Пневматическое регулирующее устройство | 1979 |
|
SU868703A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Пневматическое управляющее устройство | 1977 |
|
SU691807A1 |
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| Система автоматического управления двухсвязным объектом | 1983 |
|
SU1158973A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |

