Изобретение относится к электротехнике, в частности к пьезоэлектрическим двигателям, и может быть использовано в лабораторных устройствах, робототехнике, станкостроении, оптоэлектронике, механике.
Известен пьезоэлектрический двигатель, содержащий пластину, выполненную из материала с высоким модулем упругости, пьезоэлемент, закрепленный на пластине с возбуждением на ее поверхности вращающихся акустических зон, и подвижный ротор, установленный на пластине, снабжен прокладкой с выступом, смонтированной на конце ротора и изготовленной из износостойкого материала, коническими опорами, сопряженными с пластиной по центрам акустических зон (Заявка №2002108259, Пьезоэлектрический двигатель, 2003.11.10). Недостатком такого двигателя является необходимость точной установки опор ротора по центрам акустических зон на пластине.
Известен также пьезоэлектрический двигатель (Заявка №93018187, Пьезоэлектрический двигатель и способ управления им, 1995.06.27), содержащий размещенные в корпусе пьезоэлектрический осциллятор, волновод с износостойкой прокладкой на конце, взаимодействующей с ротором. Осциллятор свободным концом плотно прижат к боковой поверхности волновода. Недостатком этого двигателя является передача движения ротору только от конца волновода, необходимость использования износостойкой прокладки на конце волновода и отсутствие реверсивного вращения ротора.
Задачей изобретения является упрощение конструкции и расширение функциональных возможностей двигателя.
Задача решается тем, что в пьезоэлектрическом волновом двигателе, включающем корпус, пьезоэлектрический осциллятор, волновод и ротор, волновод выполнен в виде металлического стержня, а осциллятор закреплен к одному из торцов стержня, причем ротор, взаимодействующий с волноводом, расположен на любом из его участков поверхности.
Пьезоэлектрический волновой двигатель может содержать дополнительно по меньшей мере еще один ротор.
Пьезоэлектрический волновой двигатель может содержать дополнительно второй осциллятор, причем осцилляторы закреплены к противоположным торцам волновода.
Возможно выполнение пьезоэлектрического волнового двигателя с металлическим стержнем, содержащим по меньшей мере один криволинейный участок, на котором установлен ротор, выполненный в виде кольца.
На фиг.1а изображен пьезоэлектрический волновой двигатель, где 1 - корпус, 2 - пьезоэлектрический осциллятор, 3 - волновод в виде металлического стержня, 4 - ротор.
На фиг.1б изображен пьезоэлектрический волновой двигатель, где 1 - корпус, 2 - пьезоэлектрический осциллятор, 3 - волновод в виде металлического стержня, 4 - ротор, 5 - дополнительный ротор.
На фиг.1в изображен пьезоэлектрический волновой двигатель, где 1 - корпус, 2 -пьезоэлектрический осциллятор, 3 - волновод в виде металлического стержня, 4 - ротор, 6 - второй осциллятор.
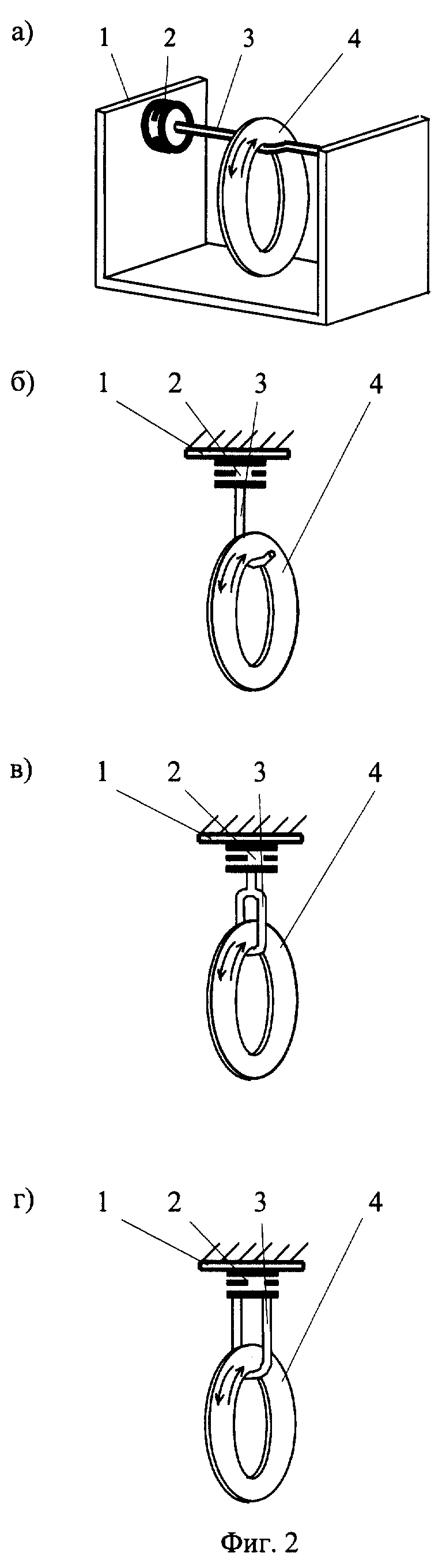
На фиг.2 изображен пьезоэлектрический волновой двигатель, где 1 - корпус, 2 - пьезоэлектрический осциллятор, 3 - волновод, выполненный в виде металлического стержня с криволинейным участком, 4 - ротор в виде кольца. Варианты а)-г) отличаются исполнением волновода.
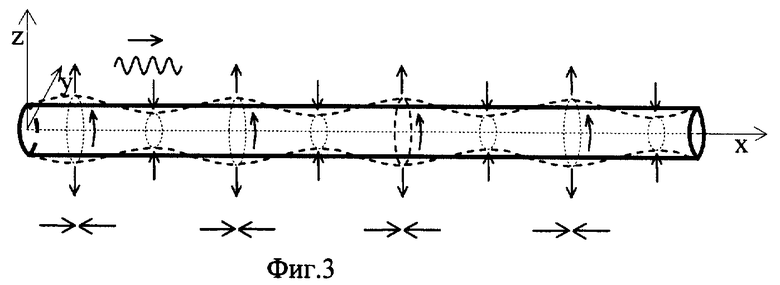
На фиг.3 схематически изображены движения участков поверхности волновода в виде металлического стержня при одновременном распространении продольных и крутильных нормальных упругих волн.
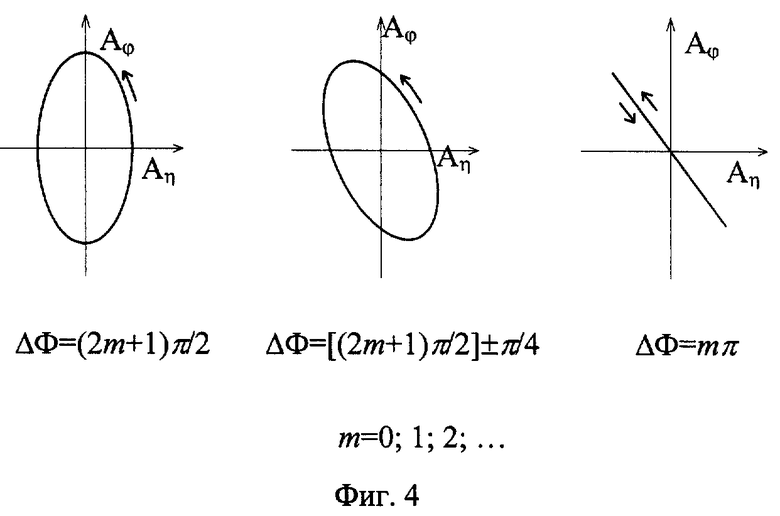
На фиг.4 изображены траектории движения частиц поверхности волновода при сложении волн одинаковой частоты с взаимно перпендикулярными колебаниями для различных значений их разности фаз.
Принцип работы пьезоэлектрического волнового двигателя заключается в следующем (см. фиг.1а). Установленный на корпусе 1 пьезоэлектрический осциллятор 2 возбуждает в волноводе 3 в виде металлического стержня продольные и крутильные нормальные волны одной и той же частоты. В результате этого в любой плоскости поперечного сечения волновода на его поверхности возбуждаются взаимно перпендикулярные колебания. При этом частицы участков поверхности волновода, в том числе соприкасающихся с ротором 4, приобретают эллиптически поляризованное вращательное движение, форма траектории и направление которого зависит от разности фаз крутильной и продольной волн. При определенных частотах колебаний осциллятора это приводит к вращению ротора, соприкасающегося с поверхностью волновода. Направление вращения ротора в пьезоэлектрическом волновом двигателе устанавливается изменением частоты, а скорость определяется амплитудой и частотой электрического напряжения на осцилляторе.
Скорости продольной и крутильной волн в волноводе в виде металлического стержня соответственно равны vξ=(E/ρ)1/2 и vϕ=(μ/ρ)1/2, где Е - модуль Юнга, μ - модуль сдвига и ρ - плотность материала волновода. Разность фаз крутильной и продольной волн на участке поверхности волновода равна ΔФ=(1/vϕ-1/vξ)ωx, где ω - круговая частота волн, x - расстояние участка поверхности волновода от источника волн.
Траектория движения частиц поверхности металлического стержня в плоскости поперечного сечения при разности фаз крутильных и продольных волн ΔФ=(2m+1)π/2 (m=0; 1; 2; ...) приближенно представляет эллипс с осями, параллельными направлениям колебаний, при ΔФ=[(2m+1)π/2]±π/4 оси эллипса находятся под углом к направлениям поперечных колебаний металлического стержня и при ΔФ=mπ траектории представляют собой отрезки прямой, составляющей с направлением поперечных колебаний поверхности стержня угол ϕ=arctg[(Aϕ/Aη)cosmπ], где Aϕ и Аη - соответственно амплитуда крутильной волны и амплитуда поперечных смещений из-за эффекта Пуассона продольной волны.
Подбором частоты колебаний источника волн можно добиться необходимого значения разности фаз крутильной и продольной волн и необходимой формы траектории движения частиц поверхности металлического стержня на любом участке его поверхности. Движение частиц поверхности волновода может приводить к вращению ротора, соприкасающегося с ним. Таким образом, возникает возможность установки ротора на разных участках поверхности волновода. Отсюда следует, что двигатель может содержать, по крайней мере, еще один ротор 5 (см. фиг.1б).
Возможно установка трех или более роторов на одинаковом или на различном расстоянии от осциллятора.
Оснащение двигателя дополнительно вторым осциллятором 6 (см. на фиг.1б), закрепленным на противоположном торце волновода, выполненного в виде металлического стержня, позволяет увеличить мощность двигателя.
В пьезоэлектрическом волновом двигателе (см. фиг.2) выполнение волновода 3 в виде металлического стержня, содержащего криволинейный участок, позволяет установить на волноводе ротор в виде кольца 4. При этом вращение кольца происходит в фиксированной области криволинейного участка волновода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2278461C1 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| Способ компоновки бурильной колонны для вторичного вскрытия продуктивного пласта | 2019 |
|
RU2764966C2 |
| Крутильный сейсмометр | 1980 |
|
SU890310A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ НАКОНЕЧНИКА УЛЬТРАЗВУКОВОГО ВОЛНОВОДА | 2015 |
|
RU2593444C1 |
| Однофазный вибродвигатель | 1979 |
|
SU864385A1 |
| ВИБРАТОР КРУТИЛЬНЫХ КОЛЕБАНИЙ | 2000 |
|
RU2187882C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1996 |
|
RU2104618C1 |
| Пьезоэлектрический реверсивный привод | 1991 |
|
SU1827708A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОДОЛЬНО-КРУТИЛЬНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2091974C1 |
Двигатель относится к электротехнике и может быть использован в лабораторных устройствах, робототехнике, станкостроении, оптоэлектронике, механике. Двигатель содержит корпус, один или два пьезоэлектрических осциллятора, по меньшей мере, один ротор и волновод, выполненный в виде металлического стержня; причем осцилляторы прикреплены к торцам волновода-стержня, который может иметь, по меньшей мере, один криволинейный участок, на котором может быть расположен ротор, выполненный в виде кольца. При определенных частотах колебаний осциллятора происходит вращение соприкасающегося с поверхностью волновода ротора. Изобретение обеспечивает упрощение конструкции и расширение функциональных возможностей. 3 з.п. ф-лы, 4 ил.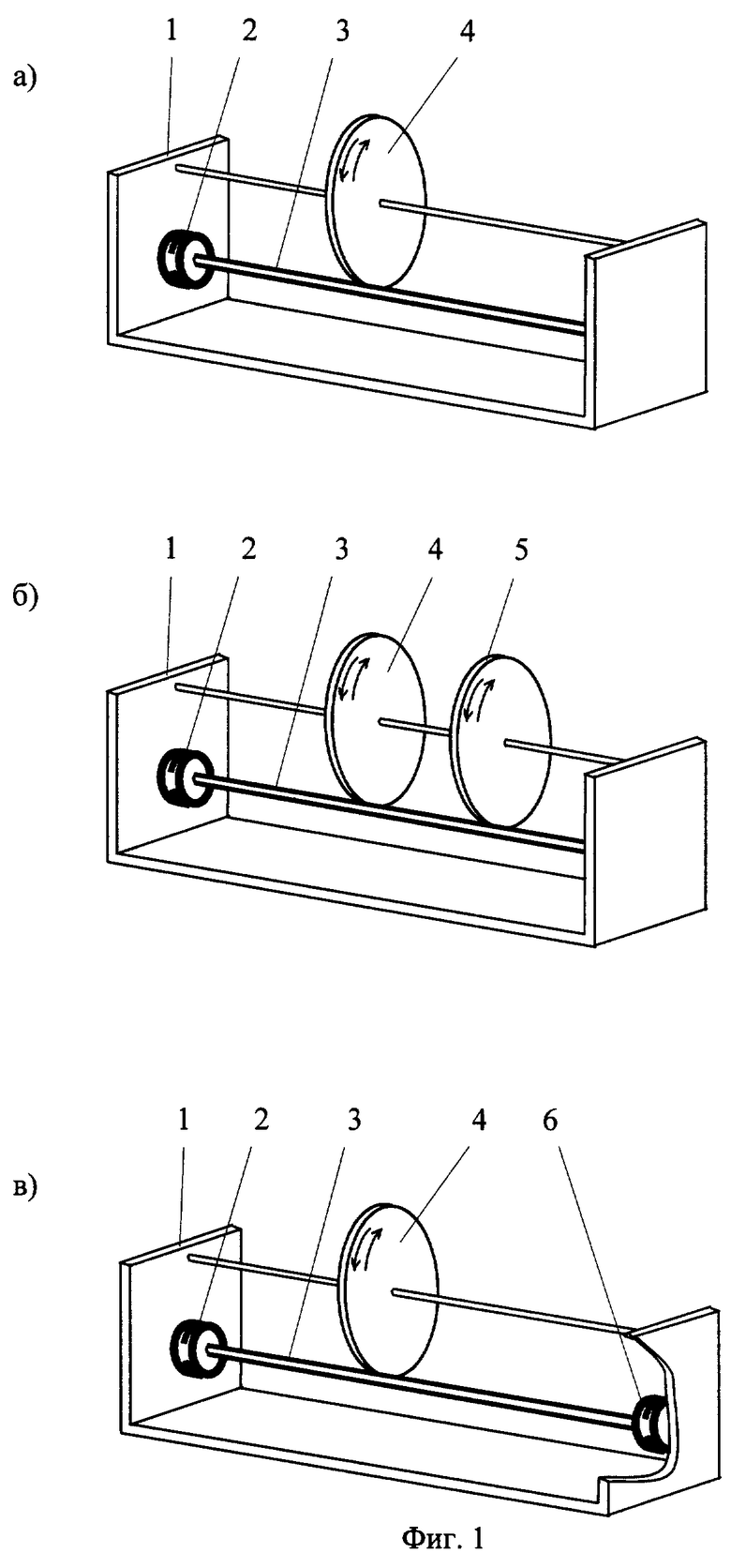
| RU 93018187 А, 27.06.1995 | |||
| RU 2002108259 А, 10.11.2003 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |

