Изобретение относится к электротехнике, в частности к пьезоэлектрическим двигателям, и может быть использовано в лабораторных устройствах, робототехнике, станкостроении, оптоэлектронике, механике.
Известен пьезоэлектрический двигатель, содержащий осциллятор и ротор [Пьезоэлектрические двигатели. Лавриненко В.В., Карташев И.А., Вишневский B.C. - М.: Энергия, 1980]. Недостатком такого двигателя является необходимость использования износостойкой прокладки в месте взаимодействия осциллятора и ротора.
Известен также пьезоэлектрический двигатель [Александров В.А. Эффект транспортирования на струне // Датчики и системы. 2001. №6], состоящий из горизонтально натянутой струны и пьезоэлемента с подвеской. В данном двигателе струна служит статором, а пьезоэлемент с подвеской - якорем. Недостатком этого двигателя является то, что он не обеспечивает устойчивость положения якоря в моменты начала движения и торможения из-за того, что подвеска имеет только один участок опоры на струне. Незначительная неустойчивость также наблюдается и при установившемся движении.
Задачей изобретения является создание пьезоэлектрического двигателя с устойчивым положением якоря.
Задача решается тем, что в пьезоэлектрическом двигателе, включающем статор в виде горизонтально натянутой металлической струны и якорь, содержащий пьезоэлемент, подключенный к генератору переменного напряжения, и подвеску из металлического стержня, закрепленную одним концом к пьезоэлементу, а другим изогнутым концом свободно подвешенную на статоре, подвеска выполнена так, что она содержит два разнесенных участка опоры на статоре.
На фиг.1 изображен пьезоэлектрический двигатель, где 1 - статор, выполненный в виде горизонтально натянутой металлической струны, 2 - пьезоэлемент и 3 - подвеска, составляющие якорь, 4 - генератор переменного напряжения. Варианты двигателя а)-г) отличаются исполнением подвески.
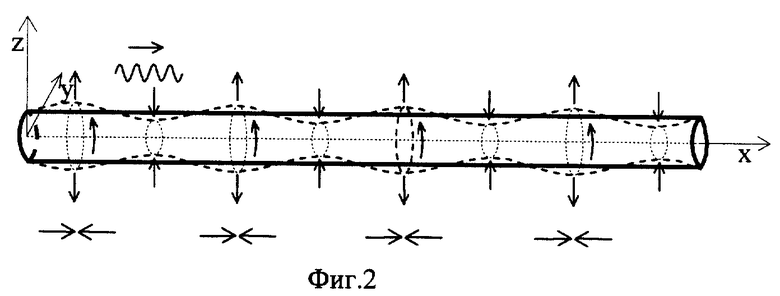
На фиг.2 схематически изображены движения участков поверхности подвески при одновременном распространении продольных и крутильных нормальных упругих волн.
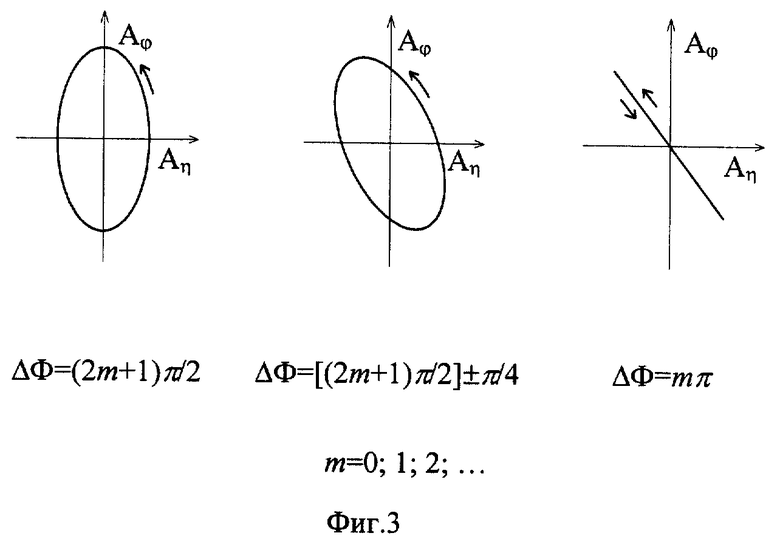
На фиг.3 изображены траектории движения частиц поверхности подвески при сложении волн с взаимно перпендикулярными колебаниями для различных значений их разности фаз.
Принцип работы пьезоэлектрического двигателя (см. фиг.1) заключается в следующем. После подключения пьезоэлемента 2 к генератору переменного напряжения 4 с помощью гибких проводов пьезоэлемент начинает колебаться и возбуждает в подвеске 3 из металлического стержня продольные (с поперечными смещениями из-за эффекта Пуассона) и крутильные нормальные волны одной и той же частоты. В результате этого в любой плоскости поперечного сечения подвески возбуждаются радиальные колебания и перпендикулярные им крутильные колебания. При этом частицы участков поверхности подвески, в том числе соприкасающихся со статором, приобретают эллиптически поляризованное вращательное движение, форма траектории и направление которого зависит от разности фаз крутильной и продольной волн. При определенных частотах колебаний пьезоэлемента это приводит к движению якоря (состоящего из пьезоэлемента и подвески) по поверхности статора 1. Направление движения якоря в пьезоэлектрическом двигателе устанавливается изменением частоты, а скорость определяется амплитудой и частотой электрического напряжения на пьезоэлементе.
Скорости продольной и крутильной волн в подвеске соответственно равны vξ=(E/ρ)1/2 и vϕ=(μ/ρ)1/2, где Е - модуль Юнга, μ - модуль сдвига и ρ - плотность материала подвески. Разность фаз крутильной и продольной волн на участке поверхности подвески равна ΔФ=(1/vϕ-1/vξ)ωx, где ω - круговая частота волн, x - расстояние участка поверхности подвески от источника волн.
Траектория движения частиц поверхности подвески в плоскости поперечного сечения при разности фаз крутильных и продольных волн ΔФ=(2m+1)π/2 (m=0; 1; 2; ...) приближенно представляет эллипс с осями, параллельными направлениям колебаний, при ΔФ=[(2m+1)π/2]±π/4 оси эллипса находятся под углом к радиусу стержня и при ΔФ=mπ траектории представляют собой отрезки прямой, составляющей с радиусом стержня угол ϕ=arctg[(Aϕ/Aη)cosmπ], где Аϕ и Аη - соответственно амплитуды крутильной волны и амплитуда поперечных смещений из-за эффекта Пуассона продольной волны.
Подбором частоты колебаний источника волн можно добиться необходимого значения разности фаз крутильной и поперечной волн и необходимой одинаковой формы траектории движения частиц поверхности подвески для обоих разнесенных участков опоры на статоре. Таким образом, возникает возможность движения якоря с двумя опорами и, следовательно, достигается устойчивость движения якоря и при старте, и при торможении. Поскольку движение якоря обусловлено колебаниями частиц поверхности подвески якоря, то применение натянутой струны в качестве статора позволяет перемещать якорь на большие расстояния в пределах длины струны.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВОЛНОВОЙ ДВИГАТЕЛЬ | 2004 |
|
RU2278462C1 |
| СПОСОБ СНИЖЕНИЯ ГИДРОДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯ | 2004 |
|
RU2276035C1 |
| ВИБРАТОР КРУТИЛЬНЫХ КОЛЕБАНИЙ | 2000 |
|
RU2187882C1 |
| ПОЛУПРОВОДНИКОВЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СВЧ-ДВИГАТЕЛЬ | 2001 |
|
RU2205494C2 |
| ДАТЧИК ВЯЗКОСТИ | 2003 |
|
RU2257566C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ МЕТАЛЛИЧЕСКОГО РАСПЛАВА МЕТОДОМ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ | 2010 |
|
RU2457473C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПОВЕРХНОСТНОГО НАТЯЖЕНИЯ ТВЕРДЫХ ЭЛЕКТРОДОВ | 1966 |
|
SU178161A1 |
| СПОСОБ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ ВЯЗКОСТИ И ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ МЕТАЛЛИЧЕСКИХ РАСПЛАВОВ (ВАРИАНТЫ) | 2010 |
|
RU2454656C1 |
| РЕЗОНАНСНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ТОКА НА ОСНОВЕ ЭФФЕКТА КАЗИМИРА | 2014 |
|
RU2577767C2 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
Двигатель относится к электротехнике и может быть использован в лабораторных устройствах, робототехнике, станкостроении, оптоэлектронике, механике. Двигатель содержит статор, выполненный в виде горизонтально натянутой струны, якорь, содержащий пьезоэлемент, подключенный к генератору переменного напряжения, и подвеску из металлического стержня, прикрепленную к пьезоэлементу и установленную на статоре в двух точках опоры. Пьезоэлемент подключен к генератору с помощью гибких проводов и возбуждает в подвеске упругие продольные и крутильные волны. Изобретение обеспечивает устойчивое положение якоря. 3 ил.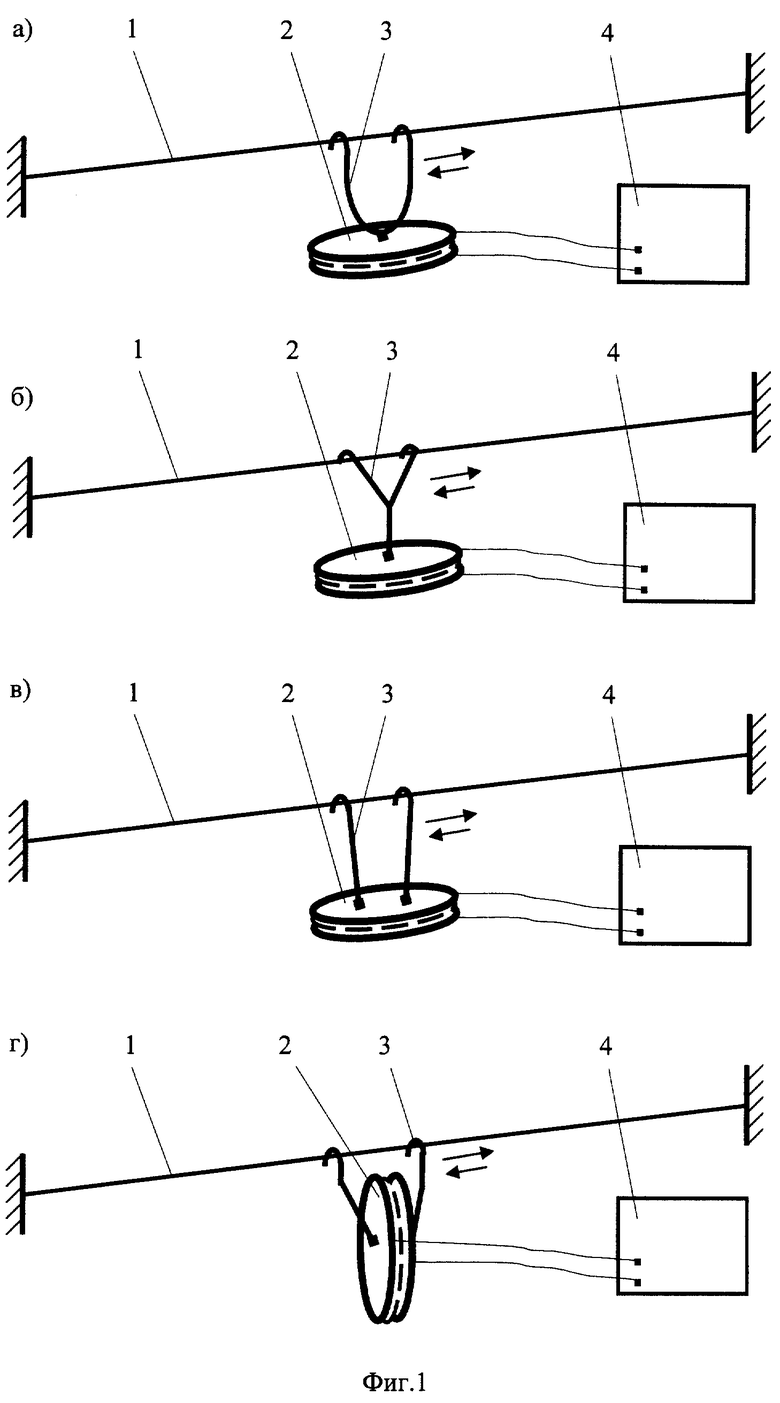
Пьезоэлектрический двигатель, включающий статор, выполненный в виде горизонтально натянутой металлической струны, и якорь, содержащий пьезоэлемент, подключенный к генератору переменного напряжения, и подвеску из металлического стержня, закрепленную одним концом к пьезоэлементу, а другим - изогнутым - концом свободно подвешенную на статоре, отличающийся тем, что подвеска содержит два разнесенных участка опоры на статоре.
| RU 93018187 А, 27.06.1995 | |||
| RU 96111138 А, 27.09.1998 | |||
| Линейный вибрационный двигатель | 1976 |
|
SU614478A1 |
| Пьезоэлектрический шаговый двигатель | 1979 |
|
SU788229A1 |

