Предлагаемое изобретение относится к электротехнике и автоматике и предназначено для использования в качестве исполнительного устройства различных автоматических систем, например, для управления электрогидравлическими приводами.
Известны электромагнитные следящие приводы, содержащие электромагнит с обмоткой, подвижным сердечником и возвратной пружиной, задатчик и датчик положения, регулятор положения и усилитель мощности, выход которого подключен к обмотке электромагнита, выходы задатчика и датчика положения подключены соответственно к суммирующему и вычитающему входам регулятора положения, выход которого подключен к входу усилителя мощности (А.с. №1815789 (СССР), МКИ Н 02 P 7/62, 1993 г.; ИНПРЕД. Каталог оборудования. - М., Издательский Дом «Грааль», 2001. - С.4-348).
В известных устройствах положение сердечника регулируется в соответствии с сигналом задания. Однако в простейшей следящей системе управления нелинейным динамическим объектом - электромагнитом показатели качества регулирования зависят от положения сердечника и являются низкими. Кроме этого, затруднительным является обеспечение устойчивой работы системы при малых зазорах между сердечником и крышкой корпуса.
Следовательно, недостатком известных технических решений является низкое качество регулирования положения сердечника.
Наиболее близким по достигаемому результату к предлагаемому техническому решению является электромагнитный следящий привод, содержащий электромагнит с обмоткой, подвижным сердечником и возвратной пружиной, задатчик и датчик положения, датчик тока обмотки, регулятор положения, регулятор тока и усилитель мощности, выход которого через датчик тока подключен к обмотке электромагнита, суммирующий и вычитающий входы регулятора положения подключены соответственно к выходам задатчика и датчика положения, а выход подключен к суммирующему входу регулятора тока, вычитающий вход которого соединен с выходом датчика тока, а выход подключен к входу усилителя мощности (Попович Н.Г., Пересада С.М., Райчук А.И. Быстродействующий электромагнитный привод / Вестник Киевского политехнического института. Электроэнергетика, 1981. Вып.18. - С.53-56).
Известный электромагнитный следящий привод обеспечивает регулирование положения сердечника в соответствии с сигналом задания и подчиненное регулирование тока обмотки. Однако, поскольку индуктивность катушки электромагнита нелинейным образом зависит от положения сердечника, а тяговое усилие пропорционально квадрату тока, то статические и динамические характеристики нелинейной следящей системы зависят от положения сердечника. При этом показатели качества регулирования имеют разные значения при различных положениях сердечника и являются низкими.
Следовательно, недостатком известного электромагнитного следящего привода являются низкие показатели качества регулирования.
Цель предлагаемого изобретения - повышение качества регулирования в электромагнитном следящем приводе.
Поставленная цель достигается тем, что в электромагнитный следящий привод, содержащий электромагнит с обмоткой, подвижным сердечником и возвратной пружиной, задатчик и датчик положения, датчик тока обмотки, регулятор положения, регулятор тока и усилитель мощности, выход которого через датчик тока подключен к обмотке электромагнита, суммирующий и вычитающий входы регулятора положения подключены соответственно к выходам задатчика и датчика положения, а выход подключен к суммирующему входу регулятора тока, вычитающий вход которого соединен с выходом датчика тока, дополнительно введены блок деления, блок перемножения и функциональный преобразователь с характеристикой F(z)=kG(z), где k - коэффициент пропорциональности, G(z) - нелинейная индуктивность катушки, z - координата положения сердечника, вход функционального преобразователя подключен к выходу датчика положения, а выход соединен с первым входом блока перемножения, второй вход которого подключен к выходу датчика тока, а выход соединен с входом делителя блока деления, вход делимого которого подключен к выходу регулятора тока, а выход соединен с входом усилителя мощности.
По сравнению с наиболее близким аналогичным решением предлагаемое техническое решение имеет следующие новые признаки:
- блок деления;
- блок перемножения;
- функциональный преобразователь с характеристикой F(z)=kG(z), где k - коэффициент пропорциональности; G(z) - нелинейная индуктивность катушки; z - координата положения сердечника.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения повышается качество регулирования положения сердечника за счет линеаризации нелинейной тяговой характеристики. При этом обеспечивается снижение чувствительности показателей качества регулирования к изменениям положения сердечника.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Известны блоки перемножения в электромагнитных следящих приводах (А.с. №1130905 (СССР), МКИ Н 01 F 7/18, 1984 г.; А.с. №1774821 (СССР), МКИ Н 02 P 7/62; H 01 F 7/18, 1989 г.). В известных и предлагаемом технических решениях блоки перемножения выполняют аналогичные функции - вычисление произведения сигнала, пропорционального току обмотки, и выходного сигнала нелинейного функционального преобразователя.
Известны функциональные преобразователи в электромагнитных приводах (А.с. №1130905 (СССР), МКИ Н 01 F 7/18, 1984 г.; А.с. №1774821 (СССР), МКИ Н 02 P 7/62; H 01 F 7/18, 1989 г.). Однако в известных технических решениях аналогичные устройства реализуют разные законы преобразования входных сигналов:
- в устройстве по а. с. №1130905 (СССР), МКИ Н 01 F 7/18, 1984 г. функциональный преобразователь формирует сигнал, пропорциональный квадрату нелинейной индуктивности G2(z);
- в устройстве по а. с. №1774821 (СССР), МКИ Н 02 P 7/62; H 01 F 7/18, 1989 г. функциональный преобразователь (вычислительный блок) формирует сигнал, пропорциональный статической составляющей тягового усилия, т.е. произведению квадрата нелинейной индуктивности на квадрат тока;
- в предлагаемом техническом решении функциональный преобразователь формирует сигнал, пропорциональный нелинейной индуктивности катушки.
Блоки деления в известных устройствах аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
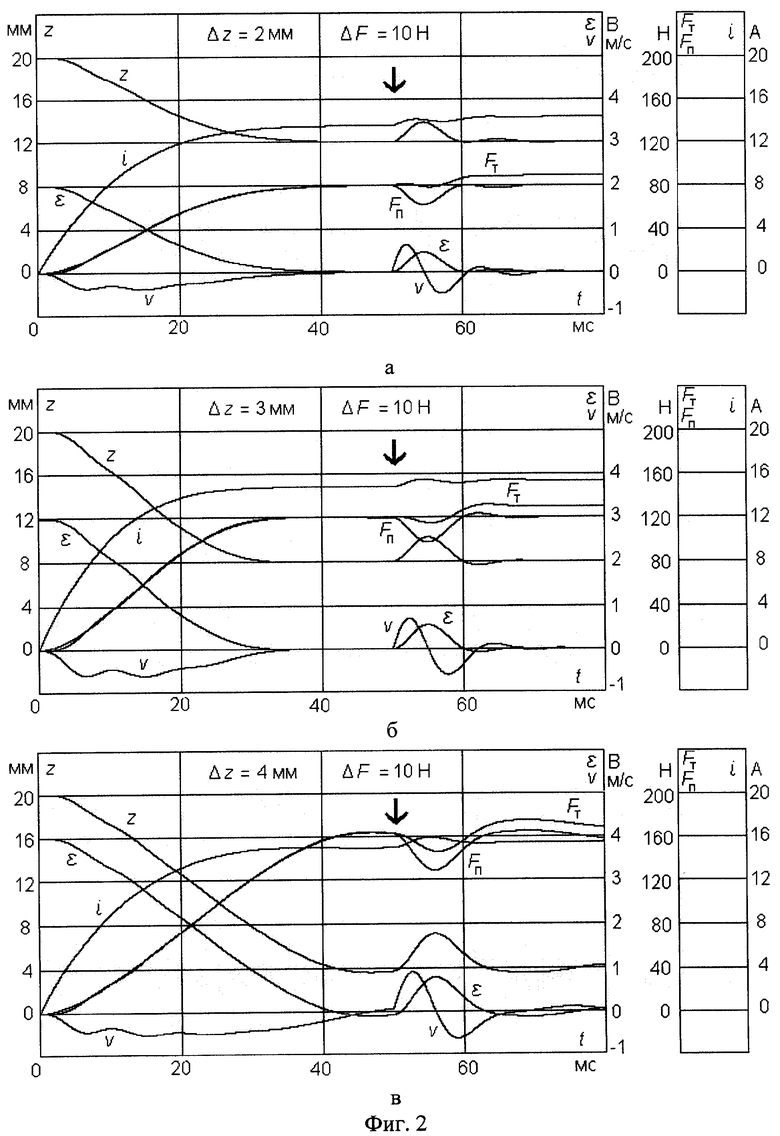
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана схема электромагнитного следящего привода, на фиг.2 приведены диаграммы переходных процессов в системе при различных положениях сердечника.
Электромагнитный следящий привод содержит: задатчик положения 1, регулятор положения 2, регулятор тока 3, блок деления 4, усилитель мощности 5, датчик тока 6, блок перемножения 7, функциональный преобразователь 8, датчик положения 9, электромагнит 10 с обмоткой 11, подвижным сердечником 12 и возвратной пружиной 13.
В предлагаемом электромагнитном следящем приводе суммирующий и вычитающий входы регулятора положения 2 подключены к выходам соответственно задатчика 1 и датчика 9 положения, а выход подключен к суммирующему входу регулятора тока 3, вычитающий вход которого подключен к выходу датчика тока 6, а выход соединен с входом делимого блока деления 4, вход делителя которого подключен к выходу блока перемножения 7, а выход через усилитель мощности 5 подключен к соединенным последовательно обмотке 11 электромагнита 10 и датчику тока 6, первый вход блока перемножения 7 подключен к выходу датчика тока 6, а второй вход через функциональный преобразователь 8 соединен с датчиком положения 9, соединенным с подвижным сердечником 12 электромагнита 10; возвратная пружина 13 размещена между крышкой корпуса электромагнита 10 и специальным кольцом на сердечнике 12.
Электромагнитный следящий привод работает следующим образом. Обмотка 11 электромагнита 10 подключена к выходу усилителя мощности 5. Перемещение сердечника 12 в сторону уменьшения z (втягивание) происходит за счет тягового усилия, возникающего при протекании тока по обмотке. Перемещение сердечника 12 в направлении увеличения z (выталкивание) происходит за счет возвратной пружины 13. При этом координата z положения сердечника отсчитывается от внутренней стороны крышки корпуса и может изменяться в диапазоне от 0 до l, где l - максимальный ход сердечника. Положение сердечника 12 измеряется с помощью датчика положения 9, а тока обмотки - с помощью датчика тока 6. Выходной сигнал с датчика положения 9 поступает одновременно на вычитающий вход регулятора положения 2 и вход функционального преобразователя 8, на выходе которого формируется сигнал
u8=k8G(z),
где k8 - коэффициент пропорциональности;
G(z) - индуктивность катушки электромагнита 10.
Блок перемножения 7 формирует сигнал, пропорциональный произведению тока обмотки i и входного сигнала функционального преобразователя 8
u7=k8iG(z),
Регулятор положения 2 сравнивает сигнал задания с выхода задатчика положения 1 с выходным сигналом датчика положения 9 и преобразует сигнал рассогласования в соответствии с законом регулирования, например пропорционально-интегральным.
Сигнал с выхода регулятора положения 2 поступает на суммирующий вход регулятора тока 3, на вычитающим входе которого действует сигнал обратной связи по току с выхода датчика тока 6. Регулятор тока 3 преобразует сигнал рассогласования между напряжениями на его суммирующем и вычитающем входах, преобразует вычисленный сигнал в соответствии с законом регулирования и формирует сигнал управления u3, поступающий на вход делимого блока деления 4, на выходе делителя которого действует сигнал u7 (1).
Известно, что тяговое усилие электромагнита пропорционально квадрату тока и квадрату индуктивности катушки
где ρм - удельное магнитное сопротивление зазора электромагнита;
w - число витков обмотки.
В установившемся режиме ток электромагнита пропорционален входному сигналу блока деления 4.
При пропорциональном законе регулирования тока для установившегося режима в подчиненном контуре тока справедливо уравнение

где k3, k4, k5 - коэффициенты передачи соответственно регулятора тока 3, блока деления 4 и усилителя мощности 5.
Выражение (2) можно представить в виде
Тяговое усилие электромагнита (1) с учетом (3) равно

Анализ уравнения (4) показывает что:
- зависимость тягового усилия от тока в предлагаемом техническом решении линейная;
- нелинейная зависимость тягового усилия от положения сердечника, пропорциональная G(z), частично компенсируется усилием квадратной пружины
FП=FП(z).
Таким образом, компенсация естественных нелинейностей в электромагнитном следящем приводе позволяет получить характеристики системы, близкие к характеристикам линейной системы. Показатели качества регулирования при этом определяются настройками регуляторов положения и тока и имеют малую чувствительность к изменениям положения сердечника.
С целью подтверждения полученного положительного эффекта было проведено моделирование электромагнитного следящего привода со следующими параметрами.
Электромагнит.
- нелинейная индуктивность
где ρм=1,87·109 (Гн·м)-1 - удельное магнитное сопротивление зазора;
ρ0=4,7·107 Гн-1 - магнитное сопротивление стальных элементов магнитопровода.
- длина хода l=0,2 м;
- число витков обмотки w=1500;
- сопротивление обмотки r=10 Ом.
Регулятор положения с передаточной функцией
где TП=0,01 с - постоянная времени регулятора;
kП=5 - коэффициент передачи.
Регулятор тока с передаточной функцией HT(s)=kT=40.
Коэффициент передачи блока деления 4, датчика тока 6, блока перемножения 7 и датчика положения 9 равны соответственно k4=1; k6=1; k7=1; k9=250.
На фиг.2 показаны переходные характеристики системы для перемещения z, тока i, ошибки регулирования ε, тягового усилия FT. и усилия пружины FП при изменении задания u3=2 В (фиг.2,а), u3=3 В (фиг.2,б), u3=4 В (фиг.3,в). На диаграммах показаны также процессы в системе при действии на сердечник возмущающей силы ΔF=10 H в момент t=50 мс.
Приведенные на фиг.2 диаграммы свидетельствуют о высоких показателях качества регулирования в предлагаемом электромагнитном следящем приводе. Необходимо отметить, что при отсутствии корректирующей связи устойчивая работа системы при u3>3 невозможна.
Таким образом, использование в электромагнитном следящем приводе блока деления, блока перемножения и функционального преобразователя по сравнению с известным техническим решением повышает показатели качества регулирования во всем диапазоне перемещений сердечника.
Использование предлагаемого устройства в системах электроавтоматики позволит повысить технические характеристики различного оборудования, оснащенного электромагнитными приводами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ДВИГАТЕЛЯ | 1997 |
|
RU2122277C1 |
| МЕХАТРОННАЯ СИСТЕМА | 2009 |
|
RU2404503C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОЛЕБАНИЙ СИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2076439C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2008 |
|
RU2360231C1 |
Изобретение относится к электроавтоматике и позволяет повысить качество регулирования положения сердечника в следящей системе с электромагнитным двигателем. Привод реализован по принципу подчиненного регулирования координат с линейным регулятором положения, подчиненным контуром регулирования тока и дополнительной нелинейной обратной связью по току, которая имеет коэффициент передачи, пропорциональный величине индуктивности катушки G(z), где z - координата положения сердечника, и действует на входе делимого блока деления 4. За счет нелинейного алгоритма управления осуществляется линеаризация естественных нелинейностей электромагнитного двигателя и, следовательно, обеспечение высоких показателей качества регулирования во всем диапазоне изменения положения сердечника. 2 ил.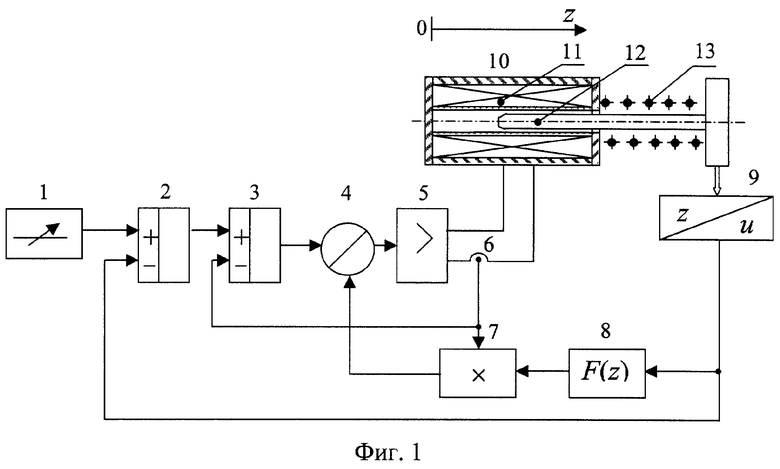
Электромагнитный следящий привод, содержащий электромагнит с обмоткой, подвижным сердечником и возвратной пружиной, задатчик и датчик положения, датчик тока обмотки, регулятор положения, регулятор тока и усилитель мощности, выход которого через датчик тока подключен к обмотке электромагнита, суммирующий и вычитающий входы регулятора положения подключены соответственно к выходам задатчика и датчика положения, а выход подключен к суммирующему входу регулятора тока, вычитающий вход которого соединен с выходом датчика тока, отличающийся тем, что в него дополнительно введены блок деления, блок перемножения и функциональный преобразователь с характеристикой F(z)=kG(z), где k - коэффициент пропорциональности, G(z) - нелинейная индуктивность катушки, z - координата положения сердечника, вход функционального преобразователя подключен к выходу датчика положения, а выход соединен с первым входом блока перемножения, второй вход которого подключен к выходу датчика тока, а выход соединен с входом делителя блока деления, вход делимого которого подключен к выходу регулятора тока, а выход соединен с входом усилителя мощности.
| ПОПОВИЧ Н.Г | |||
| и др | |||
| Быстродействующий электромагнитный привод | |||
| Вестник Киевского политехнического института | |||
| - Киев: Электроэнергетика, 1981, вып.18, с.53-56 | |||
| Способ регулирования электромагнитного двигателя возвратно-поступательного движения | 1990 |
|
SU1815789A1 |
| Электромагнитный привод поступательного движения | 1983 |
|
SU1130905A1 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| ОПТИЧЕСКИЕ УСТРОЙСТВА СО СВЕТОВОДНОЙ ПОДЛОЖКОЙ | 2004 |
|
RU2358301C2 |

