Ш«Ч
- + do - X
о Но S
где ърнач - потокосцепление в момент начала регулирования;
нач - ток в момент регулирования; (О- число витков обмотки; - S - площадь сечения якоря;
i
нач f I
uPfto S
что обеспечивает постоянство магнитной энергии и снижение потерь.
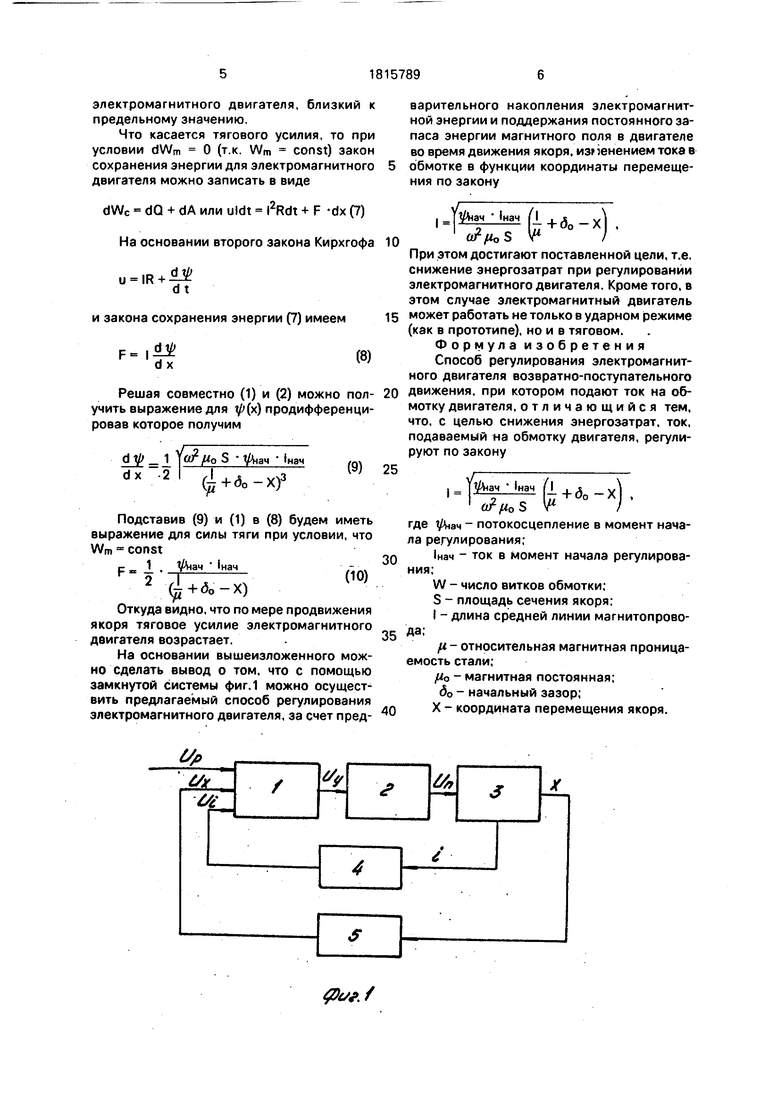
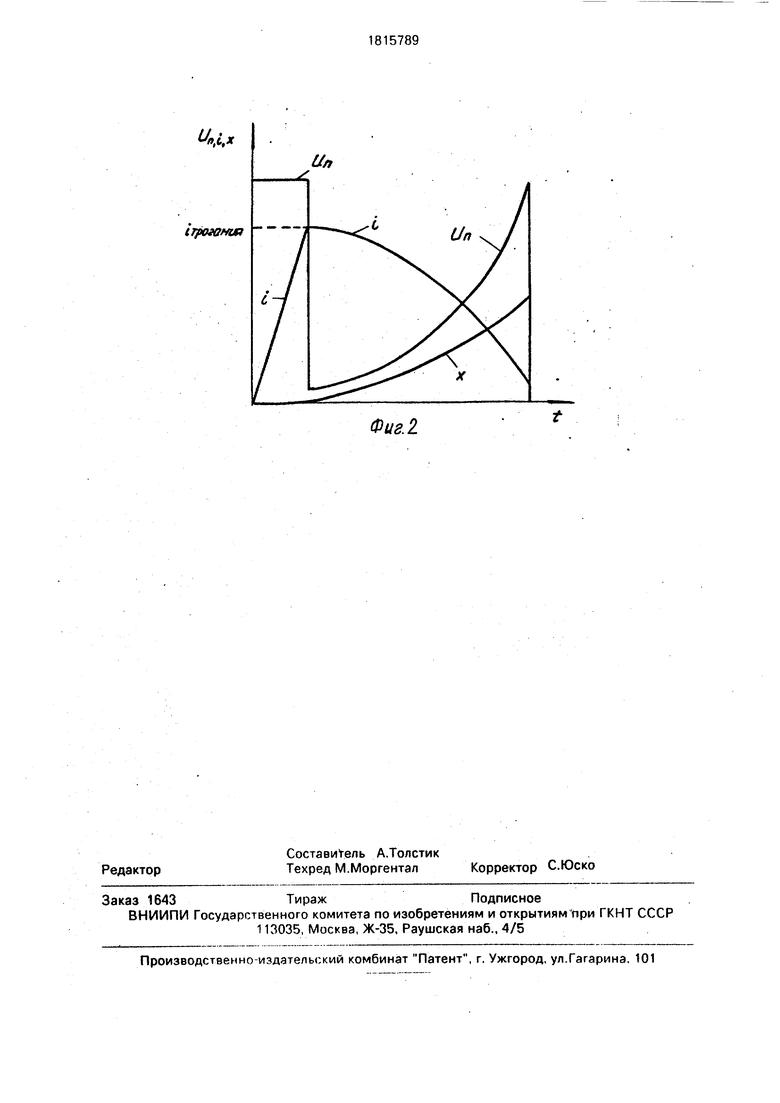
Предложенный способ подтверждается примером конкретного выполнения, где, на фиг.1 функциональная схема системы регулировэния, на фиг.2 графики напряжения питания, тока и перемещения. Реализация необходимого закона регулирования по предлагаемому способу может осуществляться замкнутой системой регулирования. Для дву/обмоточного реверсивного электромагнитного двигателя система будет состоять из двух частей; регулирование прямого хода и регулирование обратного хода. Так как практическая реализация обеих частей системы совершенно идентична, то поэтому на фиг.1 часть регулирования обратного хода не показана. Функциональная схема, реализующая регулирование электромагнитного двигателя, по предлагаемому способу состоит из следующих функциональных узлов: 1 - вычислитель, 2 - регулируемый источник напряжения (или тока), 3 - электромагнитный двигатель, 4 - датчик обратной связи по току, 5 - датчик обратной связи по положению. Способ осуществляется следующим образом. При поступлении на вычислитель 1 сигнала Up. разрешающего выдачу напряжения на обмотку прямого хода двигателя 3, вычислитель 1 преобразует сигналы обратных связей Ui и Ux поступающие с датчиков тока 4 и положения 5, в соответствии с законом регулирования
Т 1нач I (iffioS
&
+ д0 -X
I
1нач /. до
Для электромагнитного двигателя бронево- го типа можно записать
а
Y
i
(2)
jMo/uS S
10
энергия магнитного поля определяется выражением
15
1
Wm ±1})(
(3)
подставив 1 и 2 в 3 можно определить энергию магнитного поля двигателя в процессе регулирования:
Wm j 1нач Const.
Таким образом, видно, что замкнутая система регулирования, соответствующая
функциональной схеме на фиг.1, обеспечивает предварительное накопление электромагнитной энергии и последующее поддержание постоянного запаса энергии магнитного поля.
Так как энергия магнитного поля в двигателе во время движения якоря не изменяется, то баланс мощностей для данного случая можно записать в следующем виде:

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОЭФФЕКТИВНЫЙ СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2014 |
|
RU2586944C2 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ГИБКИМ ОГРАНИЧЕНИЕМ МОЩНОСТИ | 2015 |
|
RU2605458C1 |
| Вентильный электродвигатель | 1977 |
|
SU699617A1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2015 |
|
RU2604356C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕСС | 2015 |
|
RU2601727C1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
в напряжение управления (Uy) источником питания. Так как в начальный момент сигналы Ui и Ux нулевые, то с вычислителя 1 на регулируемый источник 2 поступает сигнал Uy, соответствующий максимальному выходному напряжению источника 2. Таким образом, на двигатель 3 поступает максимальное напряжение питания Un и в двигателе происходит быстрое накопление электромагнитной энергии. При достижении током I значения тока трогания начинается движение якоря. Датчики обратной связи 4 и 5 выдают изменяющиеся сигналы Ui и Ux на вычислитель 1, который опять в соответствии с законом регулирования
35Pc(t)PQ(t)+Pa(t)
(4)
где Pc(t), PQ (t) и Pa(t) - соответственно мгновенные значения мощности, потребляемой из сети, мощности тепловых потерь и полезной мощности.
Одним из важнейших энергетических показателей электрических машин является динамический КПД. Применительно к электромагнитному двигателю динамический
КПД определяется выражением
%(0
(5)
электромагнитного двигателя, близкий к предельному значению.
Что касается тягового усилия, то при условии dWm 0 (т.к. Wm const) закон сохранения энергии для электромагнитного двигателя можно записать в виде
dWc dQ + dA или uldt 2Rdt + F -dx (7) На основании второго закона Кирхгофа
R
и закона сохранения энергии (7) имеем
,djЈ dx
Решая совместно (1) и (2) можно получить выражение для VM продифференцировав которое получим
dx -2
d I S 1Нач
(1+do-X)3
(9) 25
Подставив (9) и (1) в (8) будем иметь выражение для силы тяги при условии, что Wm const
р . 1 . JfajHSL.(-Ю)
2 ()
Откуда видно, что по мере продвижения якоря тяговое усилие электромагнитного двигателя возрастает.
На основании вышеизложенного можно сделать вывод о том, что с помощью замкнутой системы фиг.1 можно осуществить предлагаемый способ регулирования электромагнитного двигателя, за счет пред zu./
варительного накопления электромагнитной энергии и поддержания постоянного запаса энергии магнитного поля в двигателе во время движения якоря, из зенением тока в обмотке в функции координаты перемещения по закону
10
15
20
I
%-(
1 V1)
aPfioS
При этом достигают поставленной цели, т.е. снижение энергозатрат при регулировании электромагнитного двигателя. Кроме того, в этом случае электромагнитный двигатель может работать не только в ударном режиме (как в прототипе), но и в тяговом. Формула изобретения Способ регулирования электромагнитного двигателя возвратно-поступательного движения, при котором подают ток на обмотку двигателя, отличающийся тем, что, с целью снижения энергозатрат, ток, подаваемый на обмотку двигателя, регулируют по закону
, №ч
нач
jl+d.-x).
aPftoS
где эч - потокосцепление в момент начала регулирования;
нач - ток в момент начала регулирования;
W - число витков обмотки;
S - площадь сечения якоря;
I - длина средней линии магнитопровода:
ft- относительная магнитная проницаемость стали;
fio - магнитная постоянная; д0 - начальный зазор; X - координата перемещения якоря.
