Изобретение относится к способам приема подвижных и неподвижных изображений (цифровые видеокамеры и фотокамеры, сканеры).
Известен способ приема изображения с помощью датчика (US, патент, 4652928, кл. H 04 N 3/14, 1988), заключающийся в том, что к линейной матрице светочувствительных элементов посредством управляющего элемента прилагают механические вибрации перпендикулярно линейной матрице. В результате механических колебаний через строчную развертку преобразователя каждый элемент матрицы последовательно формирует четыре отсчета, соответствующие четырем элементам изображения, расположенным в форме матрицы в пределах периода развертки, соответствующих одному периоду вибрации.
Недостатками способа-аналога являются сложность реализации и достижение четкости изображения только за счет удвоения шага элемента изображения.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ приема и воспроизведения изображений (RU, патент, 2109409, кл. Н 04 N 3/14, 1998), заключающийся в том, что осуществляют механическое смещение матрицы светочувствительных элементов, изображение разбивают на равные окна, соответствующие числу элементов матрицы, изображение идентифицируют в памяти ОЗУ в виде блока записей, число записей равно числу пикселей в одном окне, смещение матрицы проводят попеременно в горизонтальном направлении на величину окна, а в вертикальном - на величину элемента изображения.
Недостатками способа-прототипа являются сложность реализации, потеря точности изображения из-за погрешностей, связанных с перемещениями матрицы, а также избыточное считывание одних и тех же элементов изображения.
Задачей данного изобретения является упрощение способа и уменьшение погрешностей, связанных с перемещениями, а также исключение считывания одних и тех же элементов изображения.
Патентуется способ приема изображений, включающий механическое смещение матрицы с периодическим возвратом в начальную точку, с идентификацией изображения в памяти запоминающего устройства, отличающийся тем, что матрицу выполняют по комплементарной технологии "металл - оксид - полупроводник" (КМОП-матрица), смещение КМОП-матрицы осуществляют в последовательности: вправо, вниз, влево и вверх в исходное положение, каждый раз перемещаясь на величину элемента матрицы, и перед каждым смещением матрицы с нее снимают изображение и записывают в запоминающее устройство по адресу
K+2(N-1)+((2M-2)+D)2L,
где N - номер элемента матрицы,
М - порядковый номер строки матрицы,
L - количество элементов в строке,
К и D зависят от порядкового номера перемещения матрицы, при этом К=1, D=0 в первоначальном состоянии матрицы, К=2, D=0 после первого перемещения матрицы, К=2, D=1 после второго перемещения матрицы, К=1, D=1 после третьего перемещения матрицы и К=1, D=0 после четвертого перемещения матрицы и возврата ее в исходное положение.
На фиг.1 приведена структурная схема устройства для реализации предложенного способа.
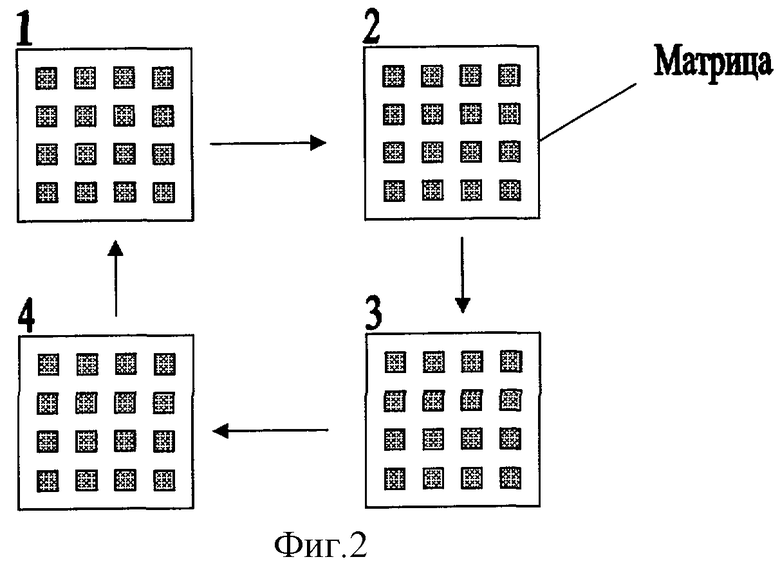
На фиг.2 приведена схема перемещений матрицы.
На фиг.3 представлена структура суммарного изображения, полученного в результате применения приведенного способа.
На фиг.4 показана последовательность записи изображения, полученного в результате применения способа в памяти запоминающего устройства.
Ниже приводим конкретный пример реализации способа приема изображений.
Устройство для реализации способа состоит из матрицы, выполненной по комплементарной технологии "металл - оксид - полупроводник" 1, шины 2, пьезодвигателя горизонтальных перемещений (ПГП) 3, пьезодвигателя вертикальных перемещений (ПВП) 4, аналого-цифрового преобразователя (АЦП) 5, микроконтроллера 6, запоминающего устройства (ЗУ) 7, буфера каскада ПВП 8, буфера каскада ПГП 9. Была использована КМОП-матрица с разрешением 800Х600 пикселей. В КМОП-матрице в плоскости Х и Y с шагом 9.9 мкм расположены светочувствительные элементы. С помощью ПГП и ПГВ матрица приводится в движение, причем схема ее перемещений, показанная на фиг.2, следующая: из исходного положения вправо, затем вниз, потом влево и обратно в исходное положение, каждый раз перемещаясь на величину элемента матрицы (9,9 мкм). Перед каждым перемещением с матрицы снимается изображение и записывается в ЗУ так, что информация с первой светочувствительной ячейки в первой строке матрицы записывается по адресу 1 в ЗУ, информация с второй ячейки записывается по адресу 1+2=3, информация с N светочувствительной ячейки первой строки матрицы записывается по адресу 1+2(N-1). После первого сдвига информация из N светочувствительной ячейки первой строки записывается в ЗУ по адресу 2+2(N-1). После второго перемещения матрицы информация с первой светочувствительной ячейки первой строки КМОП-матрицы записывается по адресу 2+2(N-1)+2L, где L - количество элементов в одной строке матрицы. После третьего перемещения матрицы информация с первой светочувствительной ячейки первой строки КМОП-матрицы записывается по адресу 1+2(N-1)+2L. Обобщенная формула нахождения адреса для любой светочувствительной ячейки КМОП матрицы в любой строке и при любом количестве сделанных перемещений выглядит следующим образом:
ad=K+2(N-1)+((2M-2)+D)2L,
где ad - адрес ячейки,
К - коэффициент, зависящий от порядкового номера перемещения (К=1 - в исходном состоянии и после третьего перемещения, К=2 - после первого и второго перемещения),
N - порядковый номер элемента матрицы в строке,
М - порядковый номер строки матрицы,
D - коэффициент, также зависящий от количества сделанных перемещений (D=1 - в исходном состоянии и после первого перемещения, D=2 - после второго и третьего перемещения),
L - количество элементов в строке.
Например, адрес третьего элемента КМОП-матрицы, находящегося в четвертой строке, и при двух сделанных перемещениях матрицы в ЗУ будет: ad=2+2(3-1)+((2×4-2)+2)2L=6+16L.
Таким образом, после всех сделанных перемещений матрицы и возврата ее в исходное положение структура суммарного снятого изображения будет иметь вид такой, как представлен на фиг.3, на этой фигуре прияты следующие обозначения: 1 - пиксели, отснятые, когда матрица находится в исходном состоянии, 2 - пиксели, отснятые после первого перемещения матрицы, 3 - пиксели, отснятые после второго перемещения матрицы, 4 - пиксели, отснятые после третьего перемещения матрицы. Разрешение суммарного изображения будет 3200Х2400 пикселей. В ЗУ информация записана последовательно строчка за строчкой так, как показано на фиг.4.
Данный способ, например, позволит реализовать видеокамеру (фотокамеру) с высоким разрешением и четким изображением, причем сама КМОП-матрица может иметь низкое разрешение, а так как это одно из самых дорогих и сложных устройств цифровой видеокамеры (фотокамеры), то стоимость самой видеокамеры (фотокамеры) с высоким разрешением будет значительно ниже.
Так как изображение записано последовательно строка за строкой, то при выведении этого изображения на устройство вывода (телевизор, монитор) не требуется дополнительная обработка этого изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕТОЧУВСТВИТЕЛЬНЫЕ УСТРОЙСТВА И СПОСОБЫ И СХЕМЫ ДЛЯ СЧИТЫВАНИЯ С НИХ | 2010 |
|
RU2524055C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ВИДЕОСИСТЕМ | 2016 |
|
RU2712821C2 |
| ВЫСОКОПАРАЛЛЕЛЬНЫЙ СПЕЦПРОЦЕССОР ДЛЯ РЕШЕНИЯ ЗАДАЧ О ВЫПОЛНИМОСТИ БУЛЕВЫХ ФОРМУЛ | 1993 |
|
RU2074415C1 |
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 1995 |
|
RU2093969C1 |
| СПОСОБ ПОЛУЧЕНИЯ И ВОССТАНОВЛЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2379726C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЦИФРОВОГО СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2287909C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ РАЗВЕРТОК | 1999 |
|
RU2178184C2 |
| ФОРМИРОВАТЕЛЬ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2389153C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ МЕЖКАДРОВЫХ ВРЕМЕННЫХ ИНТЕРВАЛОВ ВИДЕОЗАПИСИ | 2017 |
|
RU2644526C1 |


Изобретение относится к способам приема подвижных и неподвижных изображений. Техническим результатом является уменьшение погрешностей, связанных с перемещениями матриц, а также исключение считывания одних и тех же элементов изображения. Технический результат достигается тем, что осуществляют механическое смещение КМОП-матрицы с периодическим возвратом в начальную точку, при этом перемещение матрицы осуществляется в последовательности: вправо, вниз, влево и вверх (в исходное положение), каждый раз перемещаясь на величину элемента матрицы. Перед каждым смещением матрицы с нее считывают и записывают в запоминающее устройство информацию (изображение) по соответствующему адресу. Так как изображение записано последовательно строка за строкой, то при выведении этого изображения на устройство вывода не требуется дополнительная обработка изображения. 4 ил.
Способ приема изображений, включающий механическое смещение матрицы с периодическим возвратом в начальную точку, с идентификацией изображения в памяти запоминающего устройства, отличающийся тем, что матрицу выполняют по комплементарной технологии "металл-оксид-полупроводник" (КМОП-матрица), смещение КМОП-матрицы осуществляют в последовательности вправо, вниз, влево и вверх в исходное положение, каждый раз перемещаясь на величину элемента матрицы, и перед каждым смещением матрицы с нее снимают изображение и записывают в запоминающее устройство по адресу
K+2(N-1)+((2M-2)+D)2L,
где N - номер элемента матрицы;
М - порядковый номер строки матрицы;
L - количество элементов в строке;
К и D зависят от порядкового номера перемещения матрицы, при этом К=1, D=0 в первоначальном состоянии матрицы, К=2, D=0 после первого перемещения матрицы, К=2, D=1 после второго перемещения матрицы, К=1, D=1 после третьего перемещения матрицы и К=1, D=0 после четвертого перемещения матрицы и возврата ее в исходное положение.
| СПОСОБ ПРИЕМА И ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЙ | 1992 |
|
RU2109409C1 |
| US 4097900 A, 17.12.1976 | |||
| US 4383170 А, 17.11.1980 | |||
| US 4543601 А, 20.12.1982 | |||
| US 4554586 А, 13.04.1983 | |||
| US 4652928 А, 11.01.1984 | |||
| JP 2004092, 09.01.1990. | |||

