Изобретение относится к оптико-электронным способам определения формы и геометрических размеров объектов с помощью многоэлементных фотоприемных устройств. Цель изобретения - повышение точности измерений в условиях случайного смещения измеряемого объекта относительно плоскости, на которую сфокусирован объектив камеры (плоскости предметов).
Известна оптико-электронная система для контроля размеров отверстий в ситах, описанная в журнале "Автометрия" (Сибирское отделение РАН, Институт Автоматики и Электрометрии, 2003 г. №5, том 39, стр.53-61).
Способ измерения отверстий, реализованный в указанной системе, заключается в поочередной регистрации отверстий с помощью видеокамеры и двухэтапной обработке полученных изображений. На первом этапе автоматически определяются зоны изображения, в которых расположены края измеряемого отверстия. На втором этапе в зонах производятся яркостные преобразования, позволяющие выделить контуры отверстия. После этого методом центра масс определяются двумерные координаты отдельных точек контура. Диаметр отверстия вычисляется как расстояние между двумя диаметрально противоположными точками контура.
Способ позволяет с высокой точностью и быстродействием выполнять измерения круглых отверстий, штампованных в тонком стальном листе сита, но только при условии совпадения поверхности сита с плоскостью фокусировки.
В процессе эксплуатации рабочая поверхность сита вытягивается и прогибается, поэтому контур края конкретного отверстия может не совпадать с плоскостью обечайки сита, т.е. оказывается не в фокусе видеокамеры. Для точного измерения таких отверстий требуется сфокусировать видеокамеру и ввести соответствующие поправки, поскольку при фокусировке изменяется масштаб изображения. Однако на склонах рабочей поверхности сита невозможно сфокусировать все точки края отверстия, что приводит к неоднозначности фокусировки и ошибкам измерений. Кроме того, регистрация отверстий с некоторого ракурса вызывает появление перспективных искажений и, как следствие, приводит к увеличению погрешности измерений.
По совокупности признаков наиболее близким к предлагаемому является способ, описанный в патенте США №6621928 "Image edge detection method, inspection system and recording medium", G 06 F 15/42, опубл. 16.09.2003 г.
Данный способ контроля заключается в обнаружении на изображении контрастных переходов и определении расстояний между ними. Последовательность операций при контроле объектов включает следующие шаги: сохранение изображения контролируемого объекта в запоминающем устройстве; выбор прямоугольной области для поиска краев; интегрирование яркостей пикселей в выбранной области вдоль первого направления (параллельного краю); выполнение дифференцирования интегральной функции вдоль направления, перпендикулярного краю; определение координат краев; вычисление внешнего размера контролируемого объекта, равного расстоянию между двумя противоположными краями объекта.
Система, реализующая описанный выше способ, контролирует заготовки, движущиеся на ленте транспортера в поле зрения видеокамеры. Данный способ обладает ограниченными функциональными возможностями, так как не приспособлен к измерению объектов, по каким-либо причинам отклонившихся от плоскости, на которую сфокусирован объектив видеокамеры, например, стоящих наклонно или имеющих разную толщину.
К недостаткам способа, принятого за прототип, относится то, что при определении размеров заготовки двумерные координаты (х, у) ее краев на изображении пересчитываются в плоскость предметов объектива с фиксированным коэффициентом пропорциональности. В случае смещения заготовки относительно плоскости предметов оптическое увеличение не будет соответствовать расчетному и поэтому коэффициент пропорциональности должен быть изменен.
Предлагаемое изобретение ставит перед собой решение следующих задач:
- повышение точности бесконтактных измерений объектов, непреднамеренно смещенных относительно плоскости предметов камеры;
- расширение функциональных возможностей за счет измерений трехмерных объектов по одному изображению.
Указанные задачи решаются разработкой способа бесконтактного измерения объектов, имеющих на изображении расфокусированные границы, включающего регистрацию изображения объекта в запоминающем устройстве, задание прямоугольных областей изображения для последующего обнаружения границ объекта, выполнение дифференциально-интегральных преобразований, определение координат границ и вычисление размеров, а также процедуры определения ширины линий контура и преобразования ширины линий в расстояние от соответствующих границ объекта до плоскости предметов, при этом расстояние до плоскости предметов учитывают при вычислении размеров объекта.
Технический результат, достигаемый при реализации, заключается в возможности измерения заготовок разной толщины без дополнительной подфокусировки объектива. Кроме того, данный способ дает возможность измерения трехмерных объектов, имеющих грани, расположенные на некотором расстоянии от плоскости предметов и непараллельные ей.
Достижение технического результата возможно благодаря тому, что существует прямая связь между отклонением предмета от поверхности, на которую сфокусирован объектив, и величиной дефокусировки изображения. Известно, что при отклонении объекта от плоскости предметов его контуры на изображении оказываются нерезкими ("смазанными"), причем чем дальше от плоскости предметов находится объект, тем шире его контурная линия. В общем случае на изображении возможна неравномерная ширина контура, что свидетельствует о наклоне границы объекта к плоскости наилучшей фокусировки.
В заявляемом изобретении толщина линий на изображении, соответствующих краям или ребрам объекта, используется в качестве параметра для определения расстояния от соответствующего ребра до плоскости фокусировки. Для того, чтобы преобразовать ширину линии в третью координату, необходимо знать функцию преобразования. Эта функция - функция зависимости величины расфокусировки контурных линий от расстояния между объектом и плоскостью предметов - должна быть определена на этапе калибровки оптико-электронной системы.
Итак, предлагаемый способ бесконтактных измерений объектов содержит следующие шаги (фиг.1):
1 - регистрация изображения контролируемого объекта в запоминающем устройстве;
2 - отображение на экране монитора;
3 - выбор областей (зон) для поиска границ;
4 - математические преобразования изображений в зонах и выделение контура;
5 - определение двумерных координат точек контура в каждой из зон;
6 - определение ширины линий контура;
7 - определение расстояния от объекта до плоскости фокусировки;
8 - вычисление размера контролируемого объекта.
Общие с прототипом признаки: регистрация изображения контролируемого объекта в запоминающем устройстве; отображение на экране монитора; выбор областей (зон) для поиска границ; математические преобразования изображений в зонах и выделение границ; определение координат границ; вычисление размера контролируемого объекта.
Новыми признаками являются дополнительно введенные шаги определения ширины линии контура на изображении и расстояния от объекта до плоскости предметов, а также изменения в процедуре вычисления размера, связанные с учетом высоты расположения границ объекта над плоскостью фокусировки.
На фиг.1 схематически представлена последовательность действий при осуществлении предлагаемого способа.
На фиг.2 показана реализация способа на примере устройства автоматического контроля сит.
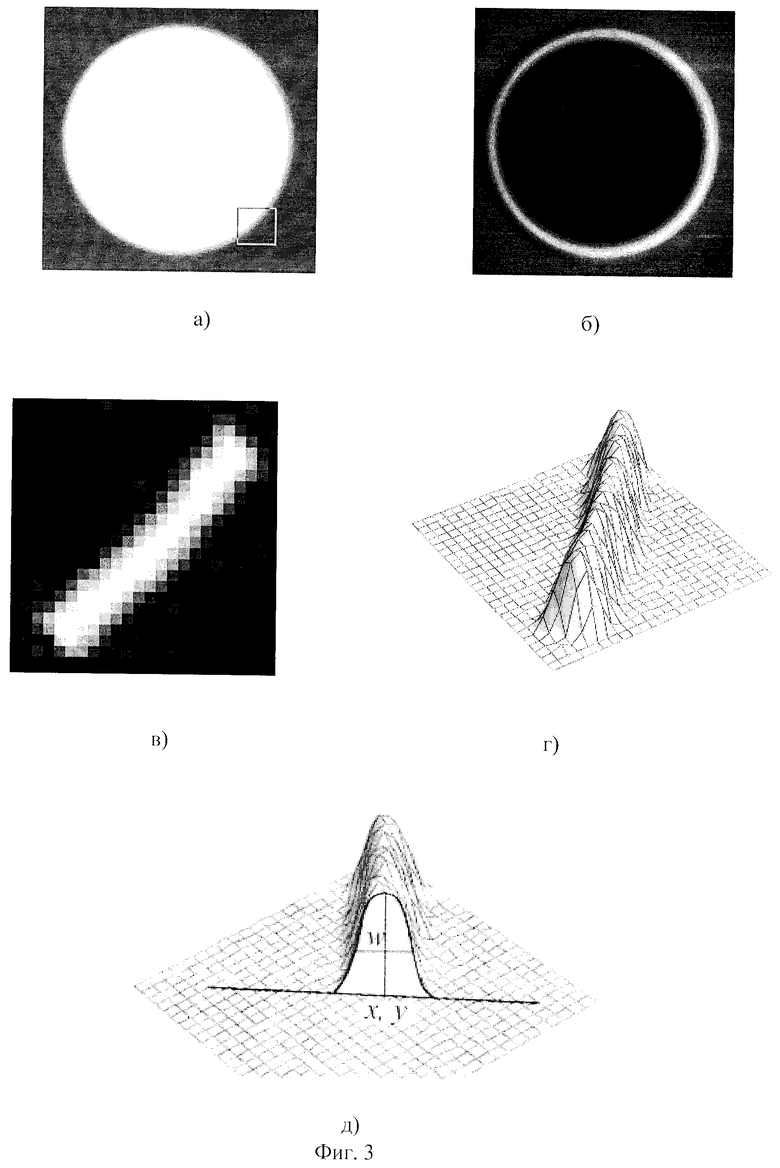
На фиг.3 представлены изображения отверстия сита, полученные на различных этапах заявляемого способа.
Пример.
Контролируемое отверстие сита 1 с помощью сканирующего стола 2, управляемого контроллером 3, вводят в поле зрения видеокамеры 4. Отверстие снизу подсвечивают осветителем 5. В момент, когда отверстие полностью находится в поле зрения, видеокамера регистрирует изображение.
Зафиксированное камерой изображение отверстия преобразуется в цифровой код и записывается в запоминающее устройство компьютера 6.
Далее выбирают зоны для поиска контуров отверстия. Для этого сначала определяют площадь S и координаты (x0, y0) центра массы фигуры, образованной пикселями, яркость которых превышает порог. Порог может быть принят равным полусумме яркостей фона и объекта. Все предварительные вычисления (фиг.1, шаги 3-8) выполняют в координатах изображения. Центром отверстия в первом приближении считается центр массы яркой фигуры:

где Qi - яркость пикселя; xi, yi - его координаты; n - количество пикселей, превышающих порог.
Площадь определяют простым подсчетом количества ярких пикселей: S=n. Поскольку форма отверстия близка к кругу, то его средний радиус можно считать равным  Исходя из полученных предварительных оценок центра и радиуса отверстия, выбирают зоны для точного определения края. Зоны располагают так, чтобы их центр находился на расстоянии, равном радиусу R от центра отверстия, при этом линия предполагаемого контура будет находиться примерно в середине зоны (фиг.3а). Количество зон определяется количеством измеряемых радиусов. Размеры зон должны превышать допустимый разброс радиуса отверстия.
Исходя из полученных предварительных оценок центра и радиуса отверстия, выбирают зоны для точного определения края. Зоны располагают так, чтобы их центр находился на расстоянии, равном радиусу R от центра отверстия, при этом линия предполагаемого контура будет находиться примерно в середине зоны (фиг.3а). Количество зон определяется количеством измеряемых радиусов. Размеры зон должны превышать допустимый разброс радиуса отверстия.
Используя один из множества возможных алгоритмов, выполняют интегрально-дифференциальные преобразования, которые позволяют выделить край. В качестве дифференциального преобразования, позволяющего выделить края отверстия, рекомендуется (Обидин Ю.В., Патерикин В.И. Контроль сквозных отверстий малого диаметра в алмазной промышленности. Теория, методы и средства измерений, контроля и диагностики. Материалы II международной научно-практической конференции. Новочеркасск. 21 сентября 2001 г. Часть 1, c.34-41) использовать преобразование вида

Здесь QР - пороговое значение.
После такого преобразования изображение контура приобретает вид, представленный на фиг.3б.
Точное определение координат (x, y) одной из точек контура производят, например, через координаты центра тяжести фрагмента контура, находящегося в зоне (фиг.3в, 3г). В этом случае необходимо учитывать криволинейность границы круглого отверстия.
Ширина контура (w), представленного на фиг.3д, в направлении, перпендикулярном границе, может быть определена, например, на уровне половины максимального значения яркости.
На следующем шаге производят преобразование ширины контурных линий в координату z. Минимальная ширина линий соответствует совпадению краев отверстия с плоскостью фокусировки, уширение линий границы свидетельствует об отклонении краев от плоскости фокусировки. При наклоне поверхности с отверстием ширина контура будет неравномерной (фиг.3б).
Преобразование производят по калибровочной таблице с линейной интерполяцией между табличными значениями:

где w - измеренная ширина контура; wi(zi), wi+1(zi+1) - значения ширины контура на изображениях объектов, смещенных относительно плоскости фокусировки на расстояние zi и zi+1.
Упомянутая выше калибровочная таблица должна быть заполнена на этапе настройки системы, в которой реализуется заявляемый способ. Практически калибровку можно выполнить с использованием фотошаблона отверстия, полученного на стеклянной подложке, покрытой хромом. Шаблон помещают параллельно плоскости фокусировки видеокамеры и вручную перемещают с помощью микрометрической подвижки в направлении нормали к плоскости предметов. В каждом положении изображение отверстия регистрируется видеокамерой и запоминается в ЗУ компьютера. Измерение ширины контура на изображении можно выполнить с помощью программного пакета Photoshop или создать специальную программную процедуру, которая измеряет ширину контура. Результаты измерений wi(zi) заносят в таблицу. Таблица может храниться в отдельном файле калибровки.
Таким образом, после выполнения описанных выше шагов каждый обработанный фрагмент края содержит трехмерные декартовы координаты (x, y, z) одной из точек контура объекта. На завершающем этапе необходимо преобразовать координаты xi, yi в плоскости изображений к координатам в плоскости предметов. Для определения размеров объекта, например диаметра, необходимо выбрать два фрагмента на противоположных краях отверстия.
Диаметр отверстия, равный расстоянию между диаметрально противоположными точками его контура, вычисляют в соответствии с выражением  где x1, y1, z1 - координаты одного края отверстия, x2, y2, z2 - координаты противоположного края.
где x1, y1, z1 - координаты одного края отверстия, x2, y2, z2 - координаты противоположного края.
Перемещая зону обработки, можно найти все точки, принадлежащие границе объекта, и восстановить его форму, в том числе и в трехмерном пространстве.
Таким образом, при осуществлении изобретения достигается повышение точности измерений в условиях непредвиденных отклонений объекта от фокальной плоскости камеры.
При этом также достигается возможность осуществления измерения без перефокусировки системы заготовок разной толщины, а также трехмерных объектов с гранями, расположенными на некотором расстоянии от плоскости фокусировки и непараллельными ей.
Введение дополнительных шагов при обработке изображений расширяет возможности автоматизации контроля качества промышленных изделий при одновременном снижении требований к точности установки контролируемых изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики пучка заряженных частиц | 2023 |
|
RU2816549C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ ИСХОДНОЙ ТРЕХМЕРНОЙ СЦЕНЫ ПО РЕЗУЛЬТАТАМ СЪЕМКИ ИЗОБРАЖЕНИЙ В ДВУМЕРНОЙ ПРОЕКЦИИ (ВАРИАНТЫ) | 2010 |
|
RU2453922C2 |
| СПОСОБ АНИЗОТРОПНОЙ РЕГИСТРАЦИИ СВЕТОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2790049C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| Способ калибровки подводной видеокамеры | 2022 |
|
RU2789190C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| СПОСОБ ВНЕШНЕЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2022 |
|
RU2785952C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2171487C2 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ВИРТУАЛИЗАЦИИ ЗЕРКАЛА | 2014 |
|
RU2668408C2 |

Способ бесконтактного измерения объектов, имеющих на изображении расфокусированные границы, включает регистрацию изображения объекта в запоминающем устройстве, задание прямоугольных областей изображения для последующего обнаружения контура объекта, выполнение дифференциально-интегральных преобразований, определение координат контура и вычисление размеров. Дополнительно путем калибровки измерительной системы находят зависимость ширины линий контура от смещения объекта, а при измерении определяют ширину линий контура и, используя полученную зависимость, преобразуют ширину линий в расстояние от границ объекта до плоскости фокусировки, которое учитывают при вычислении размеров объекта. Технический результат - возможность измерения без перефокусировки системы заготовок разной толщины, а также трехмерных объектов с гранями, расположенными на некотором расстоянии от плоскости фокусировки и непараллельными ей. 3 ил.
Способ бесконтактного измерения объектов, имеющих на изображении расфокусированные границы, включающий регистрацию изображения объекта в запоминающем устройстве, задание прямоугольных областей изображения для последующего обнаружения контура объекта, выполнение дифференциально-интегральных преобразований, определение координат контура и вычисление размеров, отличающийся тем, что дополнительно путем калибровки измерительной системы находят зависимость ширину линий контура от смещения объекта, а при измерении определяют ширину линий контура и, используя полученную зависимость, преобразуют ширину линий в расстояние от границ объекта до плоскости фокусировки, которое учитывают при вычислении размеров объекта.
| US 6621928 A, 16.09.2003 | |||
| Проекционное устройство для измерения линейных размеров деталей | 1990 |
|
SU1744451A1 |
| RU 2002126037 A, 27.03.2004. | |||

