ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к измерительной технике, в частности к бесконтактным средствам и методам измерения параметров деформации объектов, например, при испытаниях на прочность, в условиях повышенных температур (например до 700°С), а также при сложных напряженных состояниях, и может быть использовано для диагностирования разрушения образца и оценки времени, через которое произойдет разрушение. Изобретение найдет применение в научно исследовательских лабораториях, проводящие высокотемпературные исследования нагруженных образцов или конструкций и в промышленности, где необходимо дистанционно измерять форму и/или деформацию образца в процессе высокотемпературного деформирования.
УРОВЕНЬ ТЕХНИКИ
Существующие аналоги для измерения деформаций при повышенных температурах можно разделить на две группы: методы измерения деформаций в отдельных точках тела и методы, измеряющие деформацию непрерывно по всему исследуемому телу (или непрерывно по выбранной области тела). К методам измерения деформаций в отдельных точках тела могут быть отнесены методы тензометрии с разнообразными типами датчиков и преобразователей, используемых в них. Ко второй группе относятся оптико-геометрические (метод делительных и муаровых сеток), интерференционно-оптические, поляризационно-оптические методы и др.
В первой группе наиболее близким бесконтактным методом является видеоэкстензометр TRViewX (например, TRViewX 240S), производимый компанией Shimadzu (http://www.ssi.shimadzu.com/products/literature/Testing/C224-E052.pdf), предназначенный для бесконтактного измерения продольной и поперечной деформаций при повышенной температуре. Он позволяет регистрировать на поверхности образцов перемещения специально нанесенных оптических меток.
Однако данный видеоэкстензометр не позволяет измерять смещения произвольно выбранных точек на образце и не позволяет в полном объеме контролировать формоизменение образцов и материалов в процессе деформирования (в частности, нет возможности измерять форму образца в течение всего времени деформирования). Так же видеоэкстензометр требует высококонтрастных маркеров и сильного внешнего освещения, что труднореализуемо при повышенных температурах (свыше 200°С), а так же не описан механизм применения данного видеоэкстензометра при повышенной температуре.
Во второй группе измерителей деформации при повышенных температурах наиболее близкие аналоги можно разделить на следующие подгруппы:
1. методы, требующие нанесение специальных символов на образец,
2. методы, требующие нанесение пленок на образец (ограничен при повышенных температурах),
3. методы, использующие освещение в виде линии,
4. теневой метод,
5. методы, использующие структурированный свет.
1. Нанесение специальных символов на образец.
Известно устройство «Способ определение координат точек и ориентации участков поверхности тела сложной формы» (RU 2162591), в котором на контролируемых участках поверхности тела сложной формы размещают специальные символы-маркеры, пропорциональные размерам этой поверхности. В качестве символов используют плоские элементы одинаковой формы и размеров. Восприятие изображения поверхности тела сложной формы осуществляют оптическим фиксирующим прибором, например видеокамерой. Сравнивая изображения символа и эталонного символа, расположенной таким образом, что координаты всех точек символа известны, судят о координатах точек поверхности тела сложной формы, а также об ориентации участка поверхности, на котором расположен символ, учитывая угол его наклона.
Однако данный метод не позволяет определить форму объекта, не применим для измерения деформаций в произвольных направлениях и неприменим при измерении деформации мелких деталей. А так же применение данного метода при высоких температурах сомнительно.
2. Нанесение пленок на образец
Известен «Способ определения микродеформаций образца» (RU 2011160). На поверхность образца наносят фотослой, в качестве которого используют светочувствительный слой фотопленки, например сухого пленочного фоторезиста, который предварительно экспонируют через шаблон с координатной сеткой. Образец со сфотографированной на его поверхности координатной сеткой нагружают. При этом с помощью микроскопа измеряют размеры ячеек координатной сетки до и после нагружения и по результатам измерений определяют микродеформацию образца с криволинейной поверхностью.
Однако применение данного способа при повышенной температуре невозможно, т.к. наносимый фоторезист сгорает, а так же невозможно измерять изменения образца в момент деформирования.
3. Линейное освещение.
Данный класс отличается тем, что с помощью источника плоского луча света на измеряемую поверхность проектируется яркая контрастная линия с последующей регистрацией цифровой матрицей.
Известен «Способ измерения формы объекта и устройство для его осуществления» (RU 2256878), «Optical radius gauge» (US 5,090,811) включающий формирование на поверхности объекта с помощью светоизлучающей системы световой линии, лежащей в заданном сечении объекта, получение изображения световой линии, его обработку и определение координат профиля сечения объекта.
Известно «Устройство контроля линейных размеров трехмерных объектов» (RU 125335), содержащее проектор для проецирования на исследуемый объект изображения, имеющего не менее, двух непересекающихся линий вдоль одной из продольных осей и не менее двух камер для регистрации положении изображения, размещенные на разных расстояниях от проектора с образованием разных триангуляционных углов, с возможностью подключения процессора ЭВМ для измерения и определения координат и монитора для формирования 3Д изображения объекта.
Так же имеются разновидности данного способа, отличающиеся некоторыми деталями: «Scanning arrangement and method» (US 5,912,739), «Способ бесконтактного измерения трехмерных объектов» (RU 2365876), «Способ триангуляционного измерения поверхности объектов и устройство для его осуществления» (RU 2315949).
Однако данные способы требует вращение предмета для определения его формы или вращение камеры вокруг предмета (в зависимости от метода), не позволяют определять поверхностные деформации и помимо визуального доступа для фоторегистратора к образцу требуют другого (одного или более в зависимости от метода) визуального доступа для линейного лазера или иного механизма формирования специальной подсветки на образце.
4. Теневой метод.
Известны «Способ контроля диаметров детали» RU 2301968 и «Фотоэлектрическое устройство для измерения диаметра изделия» RU 2173833, которые могут быть использованы для бесконтактного измерения диаметра изделий и/или формы объекта. Устройство включает вращение детали, сканирование ее в поперечной плоскости пучком излучения лазерного источника, фиксацию по границам теневого участка точек касания пучком излучения поверхности детали и определение диаметра по расстоянию между этими точками касания. Измерение диаметров производят в каждом из двух заданных поперечных сечений детали во взаимно перпендикулярных продольных плоскостях детали.
Однако данный метод не позволяет измерять поверхностные деформации и не применим для больших объектов, т.к. требует принимающей матрицы соответствующей размерам объекта (известен «Apparatus and method for measuring an object» US 4,198,165 позволяющий применять матрицы существенно меньших размеров), а так же требует вращение объекта.
Так же известен «Прибор для измерения линейных деформаций изделий или образцов при нагружении и нагреве» (SU 181824), содержащий источник излучения, шторки, расположенные на пути луча и укрепленные на деформируемом объекте или образованные его краями, фокусирующее устройство, устройство для перемещения луча, приемник излучения, электрические преобразовательное, измерительное и записывающее устройства. При этом с целью повышения предела температуры нагрева объекта и снижения погрешностей вследствие влияния фона свечения шторок при нагреве, в качестве источника излучения использован источник ультрафиолетовых лучей, а в качестве фокусирующего и развертывающего устройства - вогнутое зеркало, качаемое или вращаемое относительно оси, перпендикулярной к его оптической оси.
Недостатками данного устройства является сложная система крепления камеры, подвешенная на захваты испытательной машины, необходимость ультафиолетовой подсветки и высокотемпературных окон, прозрачных для ультрафиолетовых лучей.
5. Структурированная подсветка.
Отличительная особенность данного способа заключается в проектировании на поверхность объекта структурированного света (пространственно и/или по интенсивности).
По типу структуризации света способы можно выделить на: способы, в которых проецируют набор полос с синусоидальным распределением интенсивности (например, RU 2148793 «Способ измерения формы и пространственного положения поверхности объекта» и «Structured-light, triangulation-based three-dimensional digitizer» WO9958930), способы, в которых проецируют набор изображений с заданной структурой светового потока (в приводимом примере линейных) (например, RU 2448323 «Способ оптического измерения формы поверхности»), способы, использующие принцип интерферометрии (например, EP1117973), способы, в которых используется оптическое излучение, пространственно модулированное по интенсивности (например, RU 2185598 «Способ бесконтактного контроля линейных размеров трехмерных объектов»), способы, использующие матрицу лазерных излучателей (например, RU 2296947 «Способ бесконтактного обмера тел со сложной формой поверхности») или в которых формируют на поверхности объекта массив точечных изображений (например, RU 2304760 «Способ определения координат»), способы, использующие формирование коллимированных пучков оптического излучения с двумя взаимно перпендикулярными направлениями (например, RU 2491503 «Способ распознавания трехмерной формы объектов») и др. Последующая регистрации изображения искаженной рельефом поверхности контролируемого объекта и определении с помощью цифрового электронного вычислителя формы поверхности контролируемого объекта по степени искажения структуры излученной подсветки на вычислительном устройстве. Основное предназночение данных способов – вычислять форму объекта.
Однако применение всех этих технологий при высокой температуре имеет ряд существенных трудностей: при использовании инфракрасной подсветки работа метода невозможна, т.к. происходит засветка инфракрасным излучением нагревателей и/или нагретым образцом. При использовании подсветки видимого диапазона невозможно получить изображение всего образца т.к. это требует внешней подсветки, которая в свою очередь засвечивает (полностью или частично снижает контраст) структурную подсветку. Данные методы не позволяют измерять поверхностную деформацию на исследуемом образце.
Близким аналогом так же является метод, основанный на муаровом эффекте (например, «Способ дистанционного измерения перемещений» RU 93042088). Однако данный метод связан с большой сложностью нанесения растра на поверхность изделия в процессе его изготовления, состоящего из параллельных полос и сложность при измерении равномерных деформаций по всему объему.
Известно устройство низкотемпературного бесконтактного измерения деформаций образцов по нанесенным реперам (Павленкова Е. В., Жегалов Д. В. “Числовые методы экспериментально-теоретическогоанализа больших деформаций элементов конструкций и определения параметров математических моделей упругопластических материалов”. Учебно-методическое пособие. Нижний Новгород: Нижегородский госуниверситет, 2012. – 35-40с.). Экспериментальный комплекс включает в себя испытательную машину, оборудованную соответствующими датчиками силоизмерения и деформации, цифровую фотокамеру, осветительное оборудование, персональный компьютер с пакетом прикладных программ для обработки фотоизображений. В качестве фоторегистратора был использован “Canon EOS 5D Mark II”, пакет прикладных программ производства компании National Instruments. Принцип работы заключается в периодическом фотографировании образца, с последующим распознаванием картинок в “Vision Builder for Automated Inspection”, из которого определяли удлинения образца, сужение и радиус шейки. Способ и оборудование предназначено для измерения деформаций нагруженных образцов только при комнатной температуре.
Однако, в данном устройстве отсутствует средство обеспечивающее измерение деформации при высоких температурах (до 700°С). А также используемое предположение “рабочая (измерительная) часть образца до начала образования макротрещины сохраняет цилиндрическую форму, а изменение толщины стенки равномерно на указанной длине” (см. стр. 43 данной книги) не позволяет измерять неоднородное распределение деформаций в образце. В данном решении не описана возможность адаптивного регулирования распознавания в процессе работы, необходимая при высокой температуре на образце.
Наиболее близки аналогом во второй группе является метод корреляции цифровых изображений (http://ru.wikipedia.org/wiki/Корреляция_цифровых_изображений) в частности известно некоторое улучшение метода («Multiple-Scale Digital Image Correlation Pattern and Measurement» US2014160279). Суть метода состоит в следующем: 1. Подготовка - на поверхность образца наносится стохастическая текстура, обычно в виде небольших пятен контрастной краски. 2. Фоторегистрация – в момент деформирования производится непрерывная фотосъемка образца. 3. Обработка - заключается в максимизации коэффициента корреляции, который определяется интенсивностью массива рассматриваемых пикселов на 2-ух и более соответствующих изображениях и извлечением функции проекции деформаций на эти связанные изображения. Метод позволяет получать поля деформаций на поверхности образца.
Однако применение метода при повышенной температуре (свыше 200˚С) затруднительно, при которой возникают большие сложности с наносимым покрытием, методы для нанесения стохастической структуры (например, небольшого размера черных пятен на белом фоне) на поверхность образца достаточно сложны, а точность метода существенно зависит от качества (случайное равномерное распределение) и размера (чем мельче, тем точнее) контрастных пятен. Метод не применим для автономных тонких пленок. Так же при обработке получаемых фотоданных используется технология обработки более сложная, чем в предлагаемом методе, и требует большого числа компьютерных вычислений.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Технической проблемой, на решение которой направлено заявленная группа решений, является создание способа и системы, обеспечивающих измерения деформаций на образцах бесконтактным методом, находящихся в условиях повышенных температур (до 700°С) и/или при сложном напряженном состоянии.
Изобретение обеспечивает помимо измерения деформаций (например, общая деформация образца, деформация элементов на поверхности образца и др.) так же измерение геометрических размеров (например, длины, ширины в различных сечениях, координат реперных точек и др.).
Способ характеризуется простотой и позволяет получать результаты в процессе деформаций. За счет применения технологии обработки появляется качественное повышение эффективности (а именно увеличение диапазона измерений деформаций, повышение точности измерений и координат точек на поверхности образца в существенно больших объемах, например для испытаний на осадку, значение диаметра образца в любом продольном или поперечном сечении в любой момент времени) и легкости количественной оценки деформаций образца при высокотемпературном воздействии на него, в том числе при сложном напряженном состоянии.
Техническим результатом, на достижение которого направлено изобретение является возможность бесконтактного измерения деформаций нагруженного образца (в том числе при сложном напряженном состоянии) и его формы при высоких температурах (до 700°С, до температуры свечения) за счет создания и обработки (в том числе его формы, деформаций в различных зонах и координат точек) числового образа исследуемого объекта при снижение трудоемкости измерений и при достижении высокой точности получаемых параметров деформации объекта.
Достижение технического результата возможно благодаря тому, что предлагаемое изобретение строит числовой образ деформирующегося образца, по которому производятся измерения. Измерительная аппаратура располагается вне высокотемпературной зоны и не требует сложной настройки, что позволяет исключить сложности измерений при повышенных температурах и снизить трудоемкость измерений, а использование предлагаемой технологии обработки обеспечивает высокоточные вычисления деформаций.
Изобретение реализуется за счет способа измерения геометрических параметров и/или деформаций образца при высокотемпературном воздействии на него, включающий в себя этапы, на которых
- осуществляют нанесение на поверхность образца реперных точек;
- устанавливают образец в высокотемпературной камере с обеспечением его освещения и визуального доступа к нему из вне;
- выполняют фото регистрацию изображений образца до начала деформирования образца и в процессе деформирования образца при высокотемпературном воздействии с фиксацией времени получаемых фотоизображений, с последовательной обработкой получаемых изображений, причем обработку каждого изображения осуществляют посредством построения трехмерного числового образа образца, причем построение числового образа образца осуществляют с помощью
- определения координат границ образца на фотоизображении в пиксельной форме с последующим построением аппроксимирующей кривой;
- определения на фотоизображении координат реперных точек в пиксельной форме;
- преобразования координат границ и реперных точек объекта из пиксельной формы в метрическую форму;
- и после чего с использованием данных, характеризующих ось симметричности образца, строят трехмерный (объемный) числовой образ образца;
- осуществляют вычисление геометрических и деформационных параметров на основании полученного трехмерного числового образа образца в качестве параметров деформации образца используют время с начала деформирования до момента разрушения образца, и/или координаты боковых точек и/или форму границ образца, и/или координаты реперных точек, и/или значения смещения реперных точек, и/или скорости смещения реперных точек, и/или высоту/длину/ширину образца в произвольных вертикальных/горизонтальных сечениях, и/или величину и положение максимального и минимального бокового смещения/утонения, и/или несимметричность деформирования, и/или бочкообразность/сужение и/или деформации элементов на поверхности и/или высоту/ширину образца и/или радиус продольной касательной окружности к боковой границе образца в месте наибольшего сужения.
В одном из частных вариантов реализации способа регистрацию фотоизображений образца осуществляют через равные промежутки времени или через заданное значение удлинения и/или сужения образца в выбранном направлении.
В одном из частных вариантов реализации способа в качестве реперных точек используют точки пересечения линий в сетке, нанесенной на поверхность образца.
В одном из частных вариантов реализации способа сетка состоит из прямоугольных ячеек размером 1-3 мм.
В одном из частных вариантов реализации способа при фоторегистрации образец располагают в центре кадра, а размер образца на кадре составляет треть кадра по ширине и/или по длине ± 10%.
В одном из частных вариантов реализации способа аппроксимирующая кривая представляет собой прямую линию или полиномиальную кривую.
Заявленное изобретение также реализуется за счет системы измерения геометрических параметров и/или деформаций образца при высокотемпературном воздействии, включающая высокотемпературную камеру, выполненную с возможностью размещения в ней образца, смотровое окно, расположенное в стенке камеры с возможностью визуального наблюдения за ним, систему освещения образца, установленную внутри камеры, фоторегистрирующее устройство, установленное с наружной стороны камеры с обеспечением размещения образца в кадре, вычислительное устройство, связанное с фоторегистрирующим устройством и выполняющее обработку изображений, визуализацию результатов обработки, и построение трехмерного числового образа образца, по которому осуществляют измерение и вычисление геометрических, и деформационных параметров с помощью вычисления координат границ образца на изображении в пиксельной форме с последующей аппроксимацией их прямыми линиями или полиномиальными кривыми, получения координат меток в пиксельной форме и преобразования координат границ, и меток образца в метрическую форму.
В одном из частных вариантов реализации системы смотровое окно выполнено из высокотемпературного оптического кварцевого стекла.
В одном из частных вариантов реализации системы система освещения представляет собой расположенную в печи одну или более ламп, каждая из которых может быть снабжена отражателем на керамических держателях, которые соединены с проволокой из нихрома для подвода электричества,
В одном из частных вариантов реализации системы фоторегистрирующее устройство жестко зафиксировано на окне с помощью соединительного фланца между смотровым окном и объективом фоторегистратора.
В одном из частных вариантов реализации системы в качестве фоторегистрирующего устройства выбран фотоаппарат или видеокамера.
В одном из частных вариантов реализации системы в качестве параметров деформации образца используют время с начала деформирования до момента разрушения образца, и/или координаты боковых точек и/или форму границ образца, и/или координаты реперных точек, и/или значения смещения реперных точек, и/или скорости смещения реперных точек, и/или высоту/длину/ширину образца в произвольных вертикальных/горизонтальных сечениях, и/или величину и положение максимального и минимального бокового смещения/утонения, и/или несимметричность деформирования, и/или бочкообразность/сужение и/или деформации элементов на поверхности и/или высоту/ширину образца и/или радиус продольной касательной окружности к боковой границе образца в месте наибольшего сужения.
В одном из частных вариантов реализации система содержит блок управления, связанный с фоторегистрирующим устройством и выполненный с возможностью формирования сигналов срабатывания фоторегистрирующего устройства, генерируемых при изменении удлинения и/или сужения образца в выбранном направлении. на заданную величину или через равные промежутки времени.
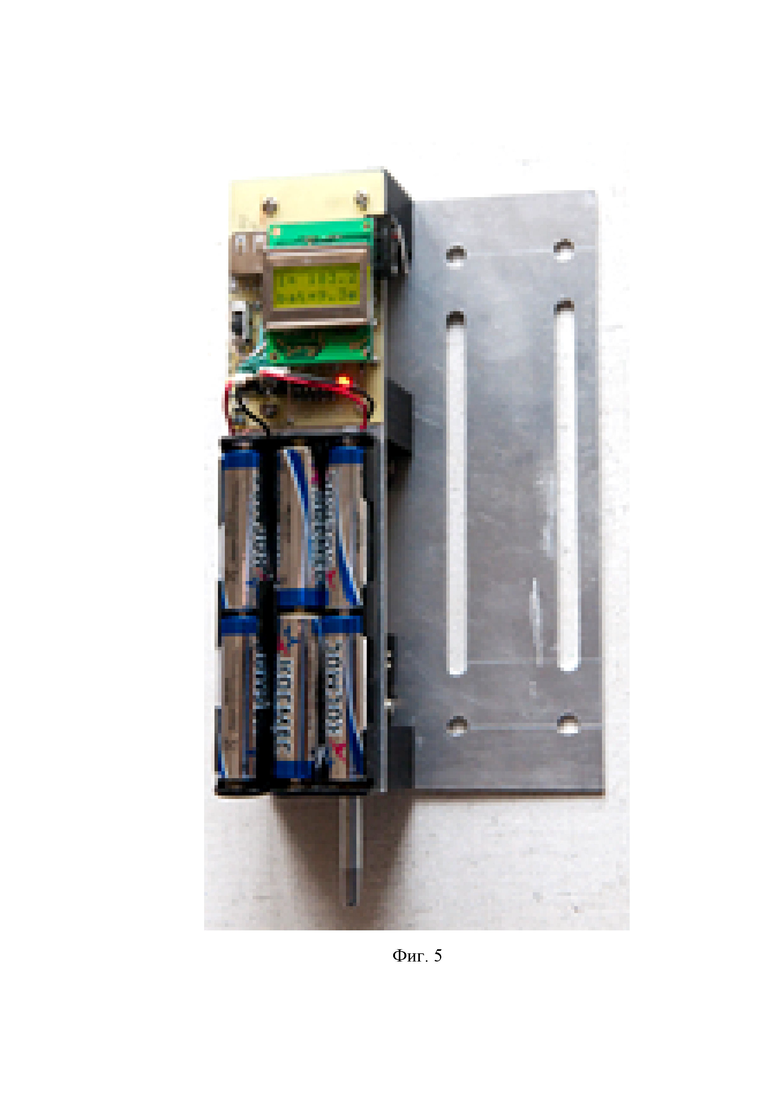
В одном из частных вариантов реализации системы блок управления включает датчик линейных перемещений, укрепленный на пластине, расположенный таким образом, что позволяет измерять удлинение и/или сужение образца в выбранном направлении, электронную систему обработки сигналов от датчика, возникающих вследствие деформаций образца, модуль управления кнопкой спуска фоторегистрирующего устройства, а также модуль индикации измеряемых и управляемых параметров.
В одном из частных вариантов реализации системы высокотемпературная камера имеет диапазон рабочих температур до 900°С.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует систему в плане установки для осуществления изобретения.
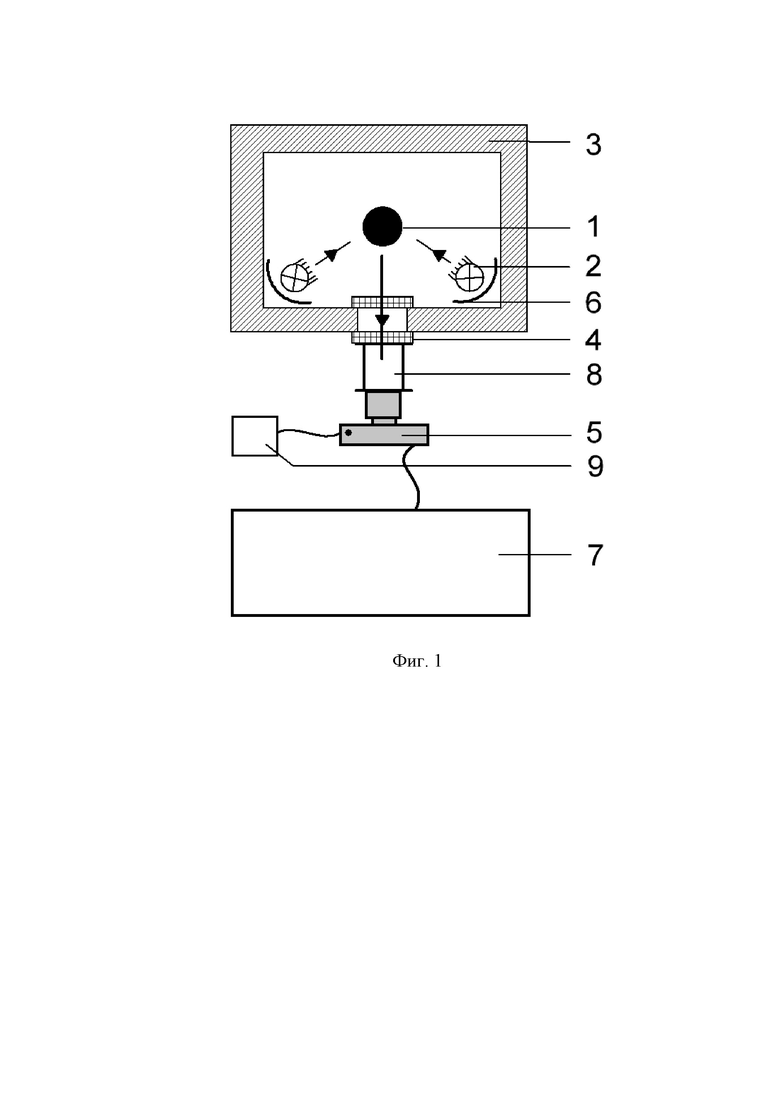
Фиг. 2 иллюстрирует блок-схема алгоритма обработки фотографических данных.
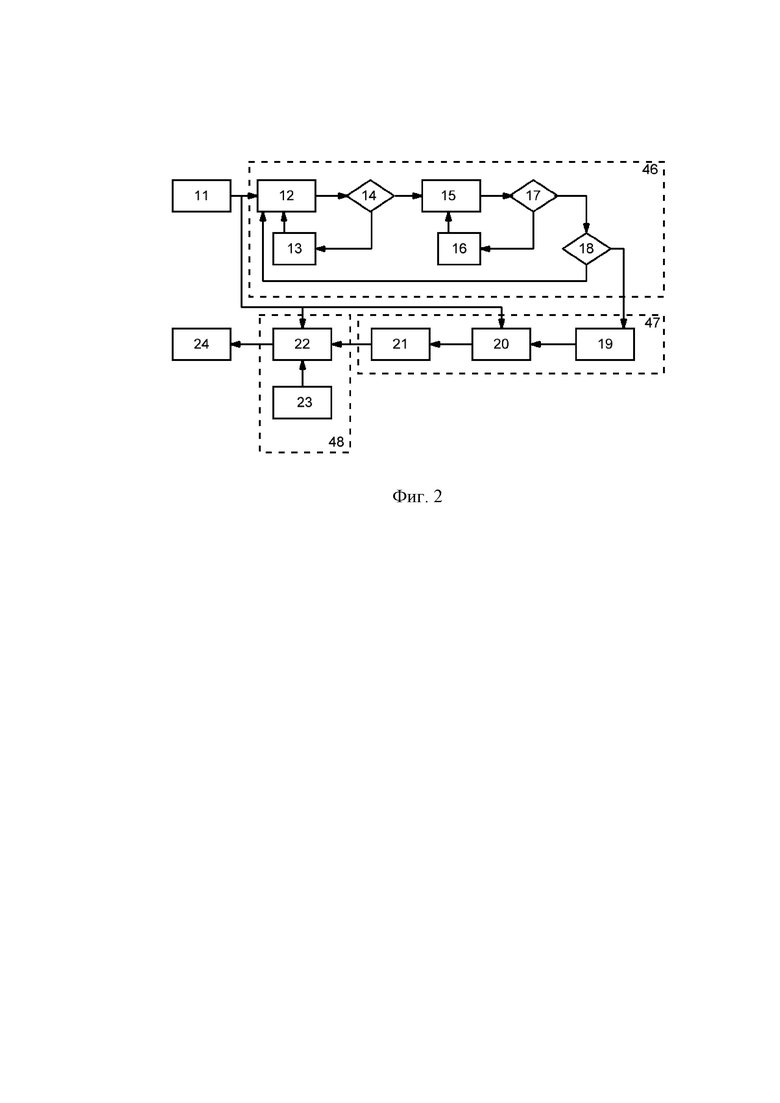
Фиг. 3 иллюстрирует примеры физической реализации системы внутреннего освещения.
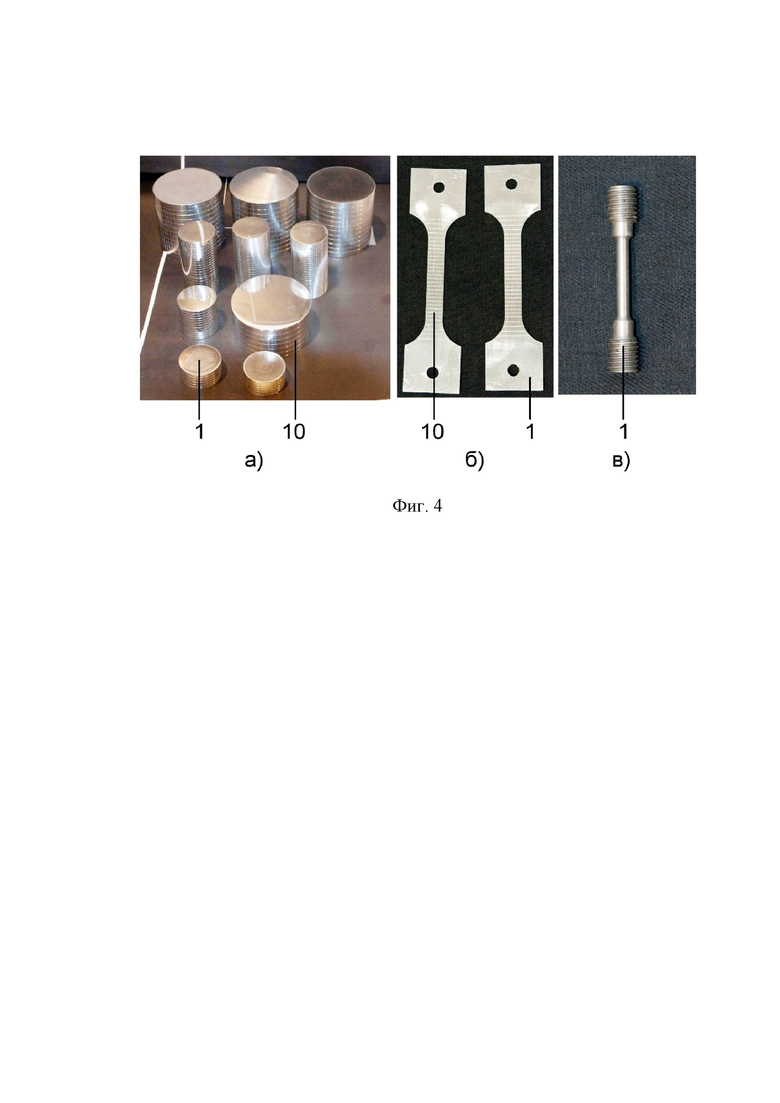
Фиг. 4 иллюстрирует примеры образцов.
Фиг. 5 иллюстрирует изготовленный блок управления фоторегистратором.
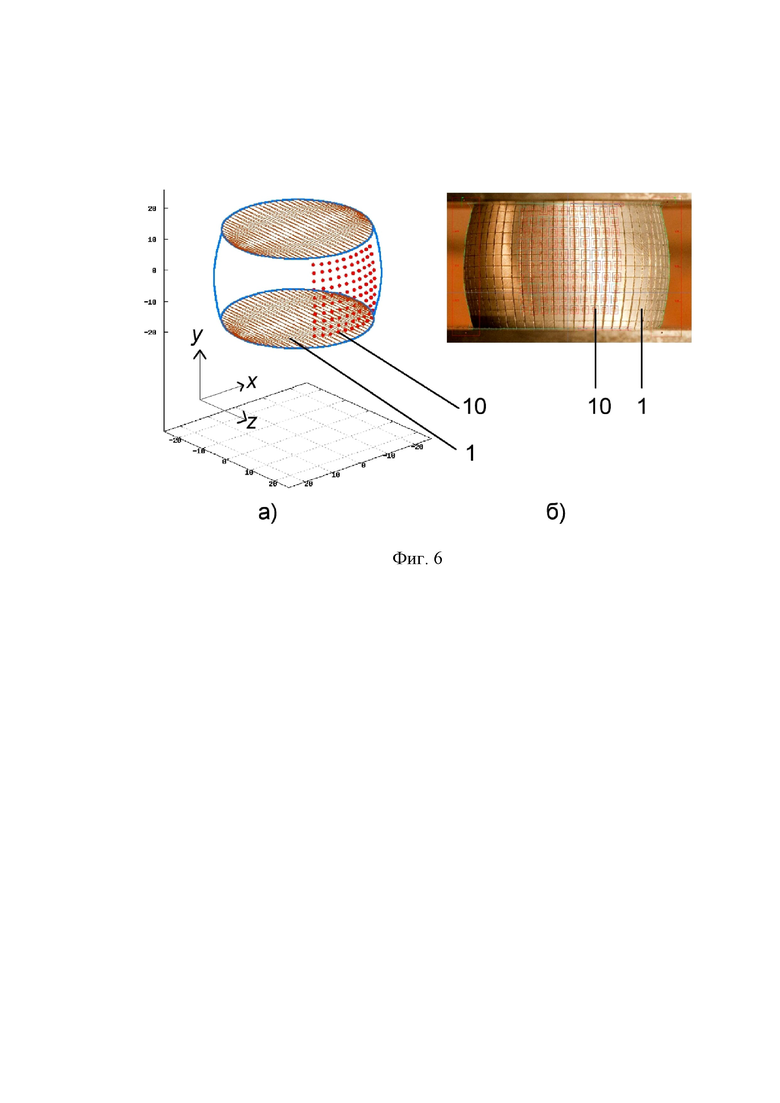
Фиг. 6 иллюстрирует реальный образец (б) в печи при 400°С и его числового образа (а).
Фиг. 7 иллюстрирует изображение компьютерного окна, демонстрирующего обработку данных, полученных в процессе измерения деформирования цилиндрических образцов.
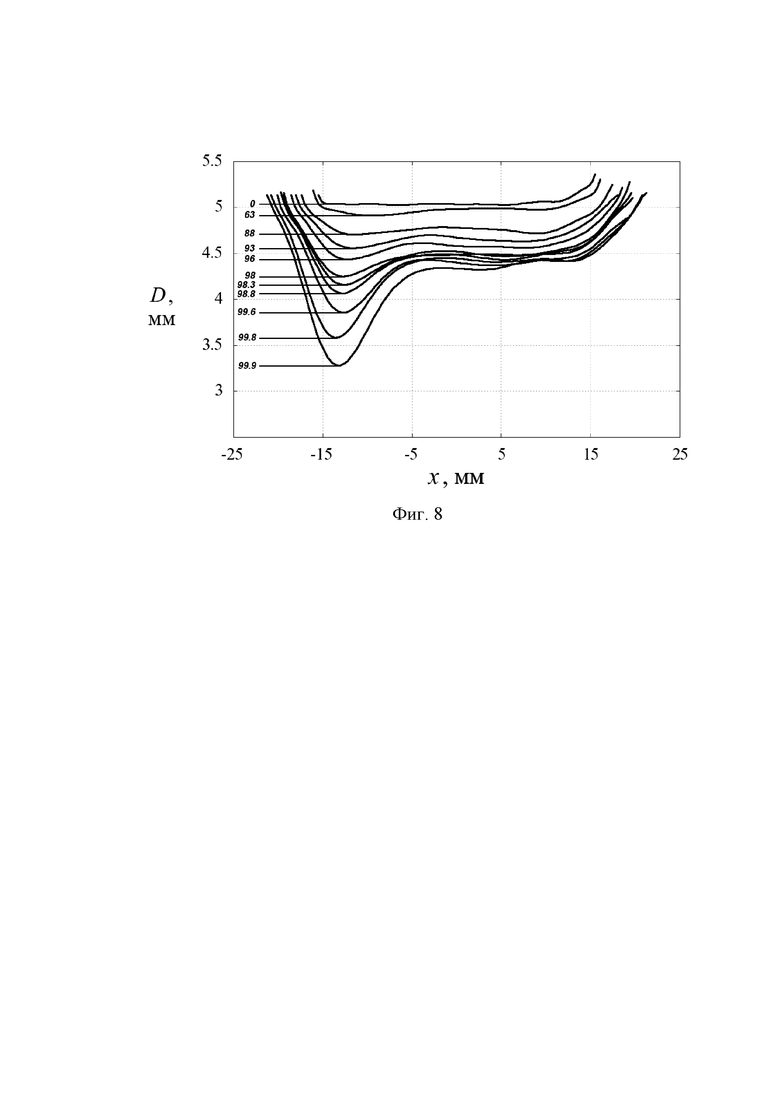
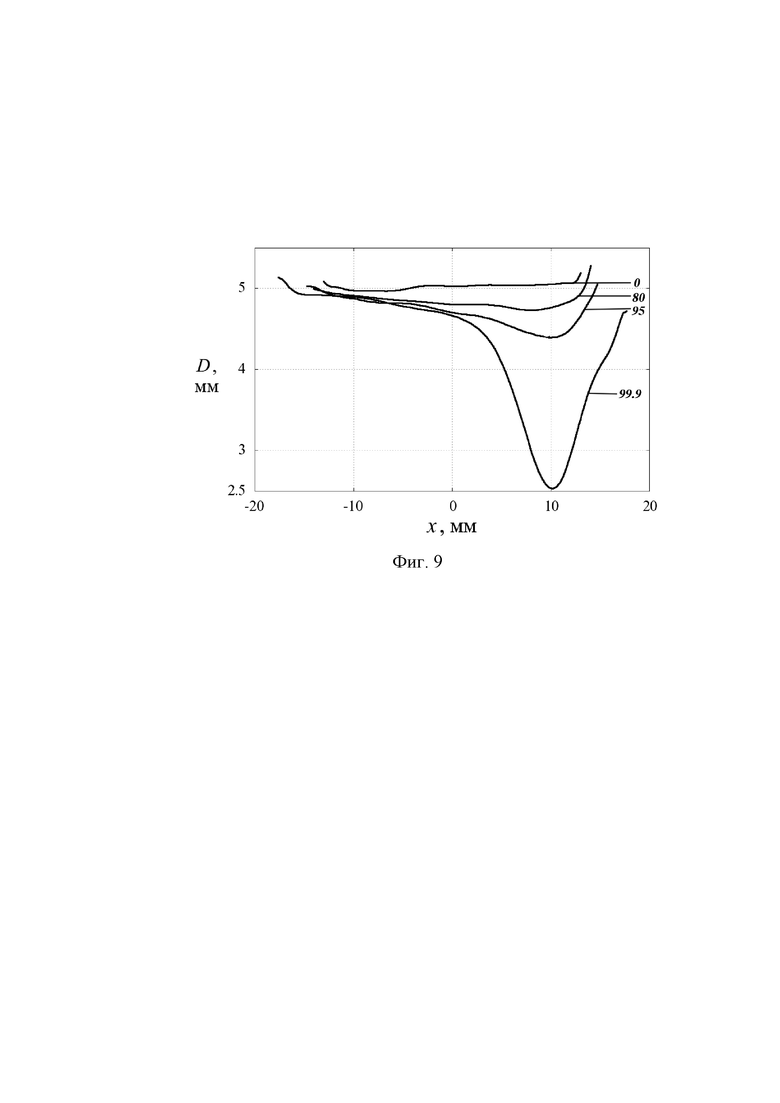
Фиг. 8 – Фиг. 9 иллюстрируют графики распределение диаметра образца вдоль его продольной координаты x в различные моменты времени.
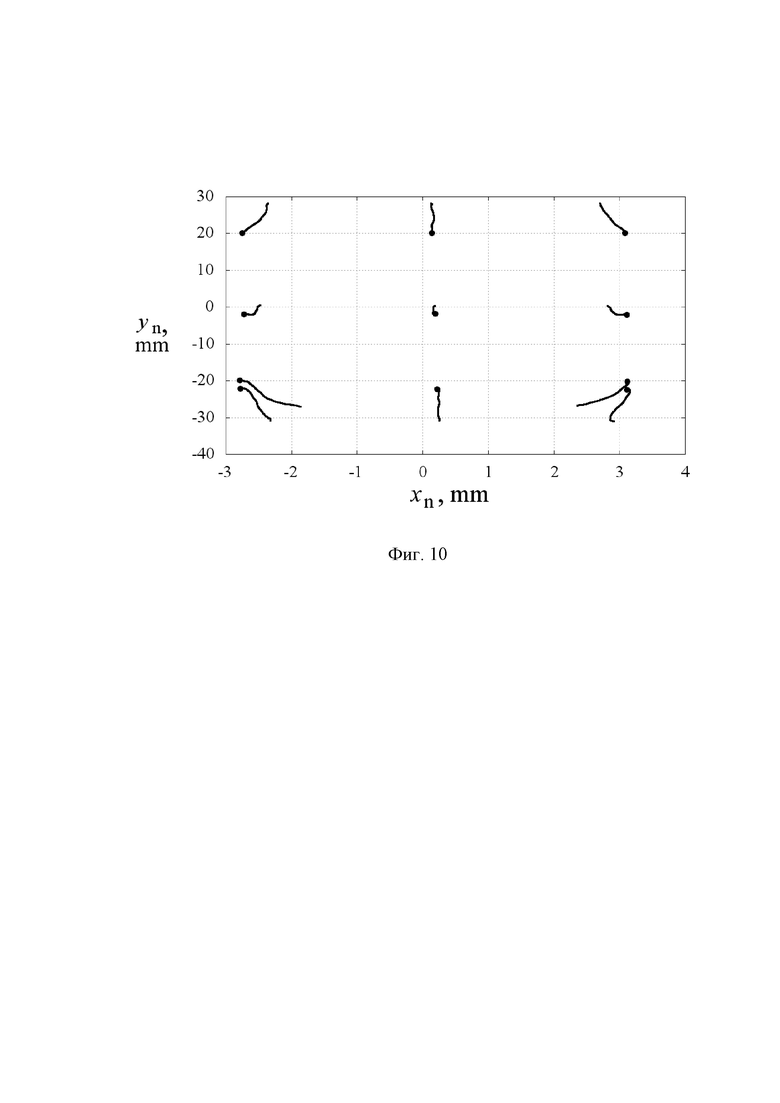
Фиг. 10 иллюстрирует графики траекторий движения точек в плоскости XY в миллиметрах на поверхности образца.
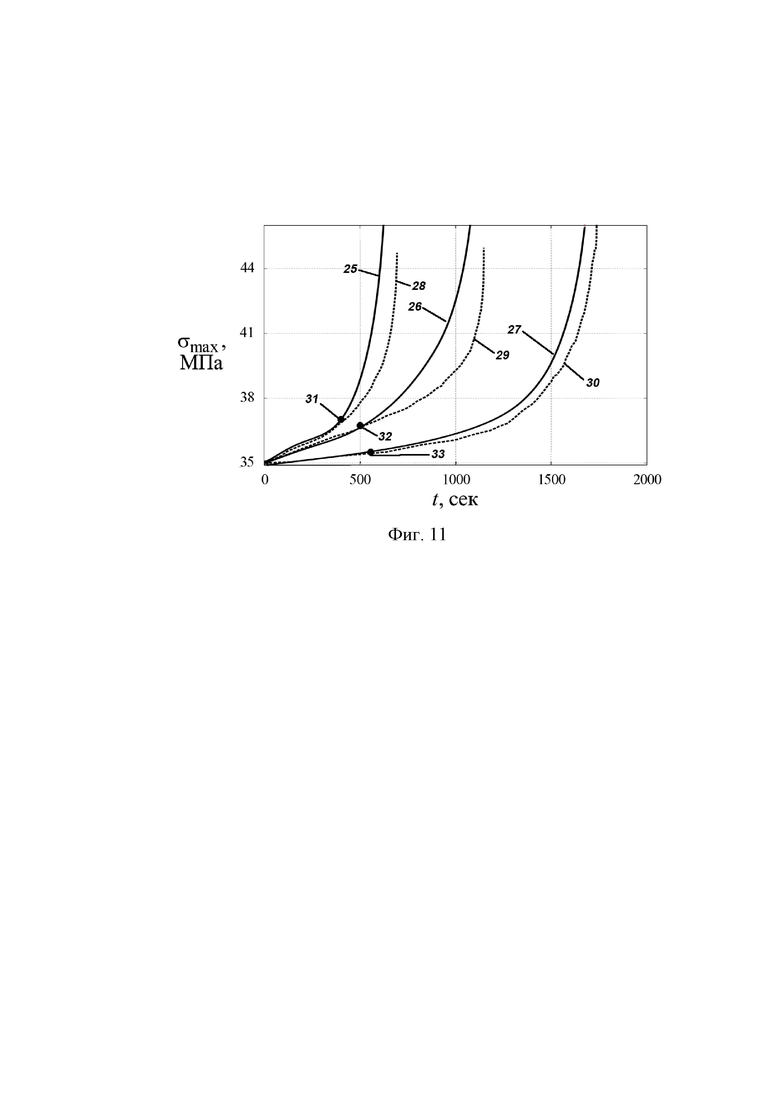
Фиг. 11 иллюстрирует графики зависимости максимального напряжения σmax(t) в образце.
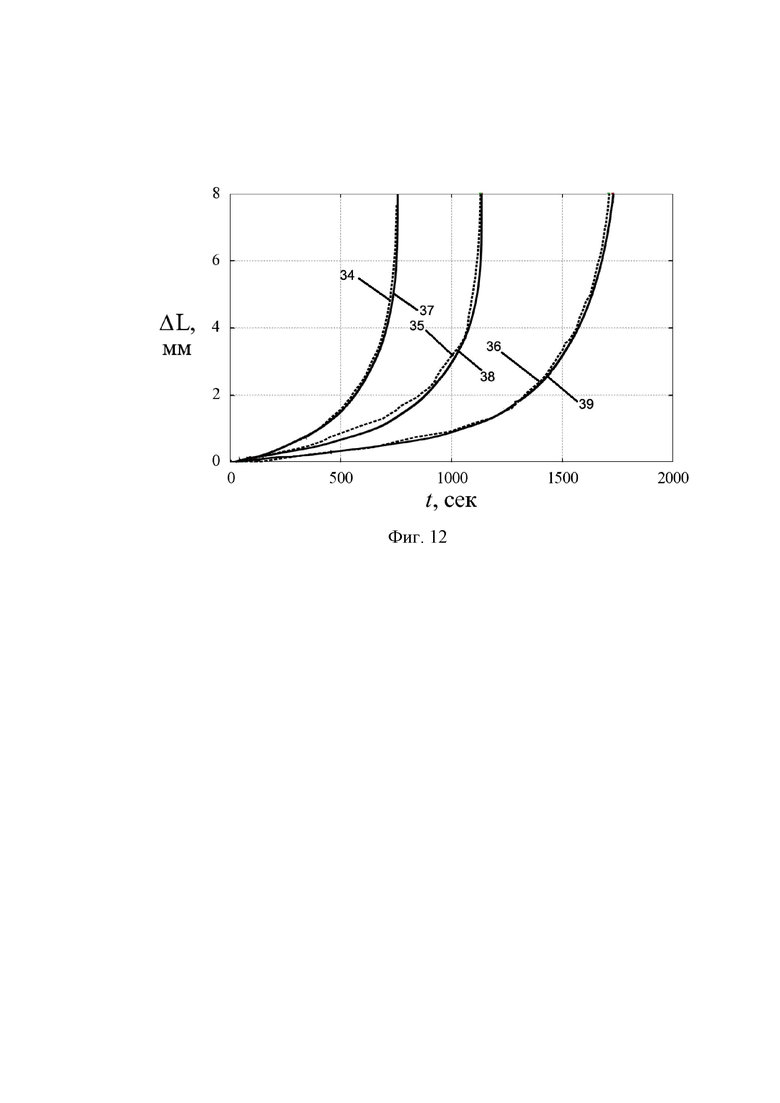
Фиг. 12 иллюстрирует кривые изменения удлинения образца от времени для различных экспериментов.
Позициями на фигурах обозначены:
1 – исследуемый объект,
2 – лампа освещения,
3 – высокотемпературная (нагревательная) камера/печь,
4 – оптические стекла, например кварцевые,
5 – фоторегистратор, например, фотоаппарат,
6 – отражающая и фокусирующая система,
7 – вычислительное устройство,
8 – соединительный фланец,
9 – блок управления,
10 – реперные метки (например, линии) на поверхности исследуемого объекта,
11 – блок хранения входных фото данных,
12 – блок выделения границ,
13 – блок изменение параметров распознавания границ,
14 – блок контроля качества распознавания границ,
15 – блок выделения реперных точек,
16 – блок изменения параметров распознавания реперных точек,
17 – блок контроля качества распознавания реперных точек,
18 – блок контроля распознавания всего изображения,
19 – блок хранения “пиксельной” геометрии,
20 – блок преобразования “пиксельную” в “метрическую” геометрию,
21 – блок формирование числового образа образца,
22 – блок формирования измеряемых данных,
23 – блок формирования запросов,
24 – блок хранения измеренных данных,
25, 26, 27 – кривые значения σmax(t) действующего максимального напряжения в образце, измеренные при помощи данного изобретения,
28, 29, 30 – кривые значения σmax(t) действующего максимального напряжения в образце, измеренные прямым методом (изменение расстояния между нагружающими тягами, вне зоны печи) с предположением об однородной деформации,
31, 32, 33 – точки расхождения кривых 25 и 28, 26 и 29, 27 и 30 соответственно,
34, 35, 36 – кривые изменения удлинения образца от времени для различных экспериментов, измеренные при помощи данного изобретения,
37, 38, 39 – кривые изменения удлинения образца от времени для тех же экспериментов, что и соответствующие кривые 34, 35, 36, но измеренное прямым методом,
40 – ТЭН-ы (тепловые нагревательные элементы) печи,
41 – основное изображение (пример, при деформировании цилиндра),
42 – меню параметров настройки,
43 – графики цветности (красный, зеленый, синий) и яркости (яркость, контрастность, цветность) выбранного горизонтального сечения,
44 – график выбранного вертикального сечения (аналогично 43),
45 – миниатюра всего кадра для быстрой навигации,
46 – автоматически и ручной редактор,
47 – вычислитель,
48 – постобработчик.
Система для измерения деформаций образца при высокотемпературном воздействии включает высокотемпературную камеру (печь) 3 с окном 4, выполненным в стенке камеры для обеспечения визуального (оптического) доступа к испытываемому образцу 1, систему освещения 2 и 6, установленную внутри печи с обеспечением максимальной эффективности освещения исследуемой рабочей области образца, фоторегистратор 5, закрепленный с наружной стороны камеры с помощью соединительного фланца, блок управления 9 и вычислительный блок (вычислительное устройство) 7, например компьютер, связанные с фоторегистратором 5. В качестве вычислительного устройства также может использоваться смартфон, планшет и любое другое устройство, выполненное с возможностью вычислительной обработки получаемых данных.
Исследуемый образец 1 располагается внутри камеры (см. фиг.1). Система освещения представляет собой одну или более ламп 2, например, кварцевые лампы, с отражателем 6 на керамических держателях, с подсоединенной проволокой из нихрома для подвода электричества (см. фиг. 3). Для исключения проникания холодного воздуха внутрь печи через окно, а также защиты от боковых засветок матрицы фоторегистратора, с наружной и внутренней сторон печи окно закрыто оптическими стеклами 4, например, кварцевыми. При этом фоторегистратор 5 укреплен с внешней стороны нагревательной камеры на продолжении оси, связывающей образец 1 и окна 4. таким образом, что образец попадает в кадр фоторегистратора и его расположение на кадре находится в центре, а размер образца на кадре составляет треть кадра по ширине и по длине ± 10 %. На объективе фоторегистратора укреплен соединительный фланец 8, другая сторона фланца через термоизолированную прокладку крепиться к окну нагревательной камеры. Фоторегистратор 5 связан с блоком обработки 7 и управляющим устройством 9 кабелями. В качестве фоторегистратора использован фотоаппарат (может также использоваться видеокамера), удовлетворяющий следующим требованиям.
1. Высокая разрешающая способность матрицы. Например, для получения разрешения на кадре 0.1 мм при образце в кадре, занимающем 1/3 от кадра, необходимо, чтобы разрешение матрицы было 6 MP (Мегапикселей).
2. Съемка с точным интервалом времени.
Требования к оптической системе:
1. Слабые геометрические искажения (среднеквадратические геометрические искажения менее 1%).
2. Высокая разрешающая способность оптики.
3. Высокая глубина резкости (более 1 см для плоских образцов). Образец в процессе эксперимента будет смещаться из плоскости фокусировки, что не должно сказываться на четкости получаемых снимков.
4. Точный подбор фокусного расстояния. Для максимальной разрешающей способности изображение образца в кадре должно быть максимальным, но также необходимо учитывать, что вследствие неидеальности оптических систем изображение на периферии кадра имеет дополнительные искажения, которые следует учитывать при компоновке кадра. Наиболее простой путь в подборе фокусного расстояния – использование вариофокального объектива.
В качестве фоторегистратора может быть использован, например, фотоаппарат NIKON D300s, оснащенный объективом NIKKOR 80-200mm f/2.8D AF с удлинительным кольцом 12 мм.
Блок управления 9 представляет собой датчик линейных перемещений, укрепленный на пластине, электронную систему обработки сигналов от датчика, возникающих вследствие деформаций образца, модуль управления кнопкой спуска фоторегистратора, а также модуль индикации измеряемых (например, удлинение образца, время с начала нагружения, превышение предела работы по удлинению, уровень разряда батарей) и управляемых параметров (например, количество сделанных кадров) (см. фиг. 5), и предназначен для формирования команд фоторегистратору 5, соответствующих изменению длины рабочей области образца например, на 0.1 мм (настраиваемый параметр). Это позволяет сохранить точность измерения и исключить избыточность кадров от эксперимента при серийной съемке или съемке по таймеру. Блок 9 так же позволяет формировать команды фоторегистратору через равные промежутки времени.
Предлагаемый способ осуществляют следующим образом.
Осуществляют подготовку испытываемого образца, для чего на его поверхность механическим способом (например, путем царапанья, выдавливания, штампованиия, перфорирования или накаткой, или любым известным из уровня техники способом) наносят реперные метки 10 (метки могут иметь любую форму и размер, наиболее преимущественным является выполнение меток виде линий, образующих сетку размерностью ячеек от 1 до 3 мм), по которым в дальнейшем производят вычисление поверхностных деформаций и движение реперных точек по поверхности образца. Для повышения точности нанесения и облегчения процесса распознавания деформационных меток, поверхность образца предварительно отшлифовывают и отполировывают (опционально). В качестве наносимых деформационных меток используют, например, точки, полученные при пересечении линий сетки. Пример изображений испытываемых образцов с нанесенными реперными линиями показаны на фиг. 4 (а) и (б).
Затем подготовленный образец помещают в камеру, обеспечивая при этом его освещение и визуальный доступ к нему из вне, нагревают до заданной температуры Т0, например 500°С, и выдерживают при этой температуре Т0 в течение времени, соответствующему установлению постоянной температуры внутри камеры и во всех элементах печи (около 1 час). В процессе высокотемпературного воздействия осуществляют многократное фотографирование образца фоторегистратором 5 через равные промежутки времени или через заданное значение удлинения образца. Для фотографирования через равные промежутки времени был использован интервальный таймер используемого фотоаппарата (если фоторегистратор оснащен таймером, то блок 9 не используется), а через заданное значение удлинения – блок управления 9. Затем осуществляют ввод данных с фоторегистратора 5 в вычислительное устройство 7, где их обрабатывают. Передача информация от фоторегистратора 5 в вычислительное устройство 7 может осуществляться с помощью проводной или беспроводной связи, например, USB подключение, Wi-Fi, Bluetooth, IrDa и т.п.
Для перевода сфотографированных изображений объекта в числовую геометрию и для последующих вычислений различных параметров использован способ, подробное описание которого представлено ниже, блок схема реализации которого изображена на фиг. 2.
Способ обработки реализуется за счет трех основных модулей: автоматического и/или ручного редактора 46, вычислителя 47 и постобработчика 48. В процессе работы указанные средства связываются между собой через общую структуру файлов, хранящих исходные или вычисленные данные.
Автоматический и ручной редактор 46 предназначены для автоматического и/или ручного распознавания границ и меток образца. Если автоматический модуль не корректно распознает изображение, то оператору необходимо исправить распознавание изображения самостоятельно и нанести реперные точки на числовой образ при помощи ручного модуля редактирования. Модуль ручного редактирования позволяет при помощи мыши нанести реперные точки на изображения, после чего производят расчет геометрии образца.
Процесс распознавания выглядит следующим образом (см. фиг. 2). Для каждого кадра из блока 11 выделяют объект, фиксируют его границы блоком 12. Контролируют блоком 14 и в случае неудовлетворительного результата – производят коррекцию параметров в блоке 13 и процесс повторяют. Для объекта (образца) выполняют определение координат границ образца на фотоизображении в пиксельной форме с последующим построением аппроксимирующей кривой. Границы объекта аппроксимируют в виде прямых линий и/или в виде полиномов (полиномиальная кривая).
Для каждого кадра осуществляется анализ каждой горизонтальной линии на изображении в окрестности правой и левой границы образца по отдельности. Каждый пиксель изображения раскладывается в системе цветов RGB и HSV, получая соответствующие числовое значения по каждому каналу. Выбирается один из каналов: R, G, B, H, S или V. Задается порог срабатывания критерия. Рассматривая зависимость значение по каналу от горизонтальной координаты, если порог преодолен, то запоминается горизонтальная координата места преодоления – это место границы образца. Операцию повторяют по всем горизонтальным линиям, пересекающих область границы образца.
Затем распознаются реперные точки 10 на поверхности образца при помощи блоков 15, 16 и 17. После контроля блоком 18 вся распознанная геометрия сохраняется в блоке 19 в файл в координатной системе фотографии в пиксельном масштабе (один пиксель – одна единица длины).
Блок вычислителя 20 использует распознанные данные фотоизображений редактором из 19 для расчета числового метрического образа в блоке 21, по которому в дальнейшем производят расчет параметров деформирующегося объекта. Числовой образ строят по вычисленным метрическим границам образца, метрическим координатам реперных точек и используя осисимметричность образца.
По первому кадру, содержащему начальную геометрию с известными размерами, производят калибровку масштаба фотоизображения. На основе числового образа и вычисленного масштаба производят расчет всех геометрических параметров эксперимента. Процесс перевода распознанных реперных точек из пиксельной в численную форму производят следующим образом: Задается координатная система на кадре фотографии, связанная с верхним левым углом фотоизображения. На каждом кадре реперные линии привязывают к этой координатной системе. Вычисляют координаты точек пересечения реперных линий – это будущий базис точек для вычисления кинематики деформирования. Вводят вторую прямоугольную координатную систему, связанную с образцом, для определенности и удобства использования координата (0, 0) соответствует середине образца по высоте на его поверхности. Координаты реперных точек из первой координатной системы пересчитываются во вторую при помощи калибровочной таблицы. Данная таблица составляется перед экспериментом. Следует отметить, что образец и соответственно реперные точки, расположены не в одной плоскости, а на искривленной поверхности образца, в то время как фотография содержит их изображение в одной плоскости, что учитывают при вычислении координат реперных точек в координатной системе, связанной с образцом.
Для различных по форме объектов способ обработки позволяет вычислять различное число параметров, например, для примера 1, образец изображен на фиг. 4(а), получать значения 14 различных параметров, например, представленных ниже. Для примеров 2 (фиг. 4(б)) и 3 (фиг. 4(в)) количество параметров меньше. Для примера 1 вычислитель позволяет производить вычисления следующих параметров (все вычисления нижеизложенных параметров производятся в координатной системе, связанной с образцом, по возможности будут опускаться параметры у переменных, верхний индекс обозначает шаг по времени  ,
,  , продольная координата
, продольная координата  ):
):
1. Прошедшее время с начала эксперимента. - .
2. Три координаты точек, лежащих на боковой границе -  .
.
3. Три координаты реперных точек -  .
.
4. Четыре значения смещения реперных точек  .
.
 , для
, для  ,
,
 .
.
5. Четыре скорости смещения реперных точек  .
.


6. Высота образца  .
.
7. Диаметр образца в различных сечениях -  .
.
8. Величина и положение максимального и минимального бокового смещения -  ,
,  .
.
9. Несиметричность торцов -  ,
,
 .
.
10. Бочкообразность -  ,
,
 .
.
11. Аппроксимационные параметры бочкообразной боковой поверхности параболой -  , где
, где
 - параметры аппроксимации параболой
- параметры аппроксимации параболой  , Суммарная среднеквадратическая ошибка аппроксимации,
, Суммарная среднеквадратическая ошибка аппроксимации,
 - величина бокового радиуса, кривизны, и суммарная среднеквадратическая отклонение боковой поверхности от окружности.
- величина бокового радиуса, кривизны, и суммарная среднеквадратическая отклонение боковой поверхности от окружности.
12. Две координаты элементов, составленных из реперных точек -  .
.
13. Высота и ширина элементов -  .
.
14. Три значения логарифмической деформации элементов -  .
.
15. Время до разрушения – 

Блок 22 постобработчика 48 наделен функцией визуализации всех вычисленных параметров, при помощи вычислителя 47, из полученных метрических данных, в виде двумерных графических зависимостей (например, фиг. 7), в виде полей на поверхности образца и в виде видеопроцесса деформирования с возможностью нанесения полей деформирования на образец виде дополненной реальности. Так же блок наделен функцией изображать графики кривых различных параметров, зависящих от времени, от высоты, от ширины, длины и других величин образца. Некоторые параметры (например , , ) имеется возможность изображать в виде полей на графическом изображении образца (дополненная реальность).
На фиг. 7 показан пример компьютерного окна фрагмент процесса обработки данных по примеру 1. Область 41 изображает цилиндр в большом увеличении (относительно нормального размера) в соответствии с выбранной областью на миниатюре 45. На области 41 имеются две подвижные линии – вертикальная и горизонтальная, по которым в область 43 и 44 выводятся графики цветости и яркости. Также область 41 содержит изображения четырех прямоугольников – два слева, справа и два сверху, снизу. Эти прямоугольники должны располагаться в области соответствующих границ цилиндра. В них производится поиск и выделение границ цилиндра (блоки 12 и 15). Поле 42, содержащее область параметров распознавания, показывает текущие их значения и позволяет их изменять (блоки 13 и 16). Над областью 41 и 42 имеются информационные поля, показывающие имя просматриваемого файла, прошедшее время с момента начала эксперимента, вспомогательную информацию и другое.
Проведение измерений. Подготовленный образец устанавливался в камеру/печь. Настраивалось освещение так, чтобы изображение на дисплеи фоторегистратора было ярким и четким. Настраивался фоторегистратор так, чтобы глубина резкости была более 1 см, для чего диафрагма зажималась до значения F8, чувствительность выбиралась 1600-3200 ISO, режим снимков – L + JPEG, режим скоростной съемки максимальная (до 7 кадров/сек). Устанавливался фоторегистратор, положение которого и параметров съемки оставались неизменным во время всего измерения.
Для повышения точности результата перед экспериментом на место образца помещалась клетчатая таблица. Производилось фотографирование нескольких кадров таблицы, по которым в дальнейшем производилась калибровка вычислителя.
Пример 1.
Заявляемое изобретение апробировано на экспериментальная установка zdmxh-30t, которая состояла из гидравлического пресса с максимальной силой сжатия 300 кН и нагревательной камерой, в которой может поддерживаться температура до 900°C, объем камеры 0.42 м3. В процессе экспериментов поддерживалось равномерное поле температур на цилиндре, давящих плитах и подводящих тягах. К установке дополнительно был подключен фоторегистратор 5, соединенный кабелем с вычислительным устройством 7.
Производилась осадка (в соответствии с ГОСТ 8817-82) сплошного цилиндра высотой 2H0 и радиусом R0 с помощью двух плит, движущихся навстречу друг другу с взаимной скоростью 2w вдоль продольной оси z. За время t1 при температуре T цилиндр осаживается до величины высоты цилиндра 2H1. Использовались цилиндры (см. фиг 4а) из алюминиевого сплава Д16Т с радиусом R0=19,5 мм и высотой 2Н0 = 39 мм. Параметры деформирования следующие:  . Осаживание производилось до величины осевого укорочения
. Осаживание производилось до величины осевого укорочения 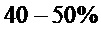 . На боковую поверхность цилиндров наносились продольные и поперечные линии глубиной 0.1 мм, образующие равномерную квадратную или прямоугольную сетку, имеющую размер одной ячейки 1.8 x 3.1 мм. Точки пересечения продольной и поперечной линий являлись реперными точками. Предварительно на торцы цилиндра наносилась высокотемпературная смазка Molykote P37. Для повышения контрастности реперных линий на боковой поверхности цилиндра, линии подкрашивались темной смазкой Molykote P1000, которая при высоких температурах становилась темно-коричневой и обеспечивала хороший контраст с серебристой боковой поверхностью цилиндра. Далее производился нагрев цилиндра, давящих плит и подводящих тяг. При достижении рабочей температуры печь переводилась на режим регулирования, и приблизительно в течение 30 минут производилось выдерживание цилиндра при этой температуре, после чего начиналось его осаживание. По достижению заданного уровня осадки процесс деформирования останавливался, а образец остужался.
. На боковую поверхность цилиндров наносились продольные и поперечные линии глубиной 0.1 мм, образующие равномерную квадратную или прямоугольную сетку, имеющую размер одной ячейки 1.8 x 3.1 мм. Точки пересечения продольной и поперечной линий являлись реперными точками. Предварительно на торцы цилиндра наносилась высокотемпературная смазка Molykote P37. Для повышения контрастности реперных линий на боковой поверхности цилиндра, линии подкрашивались темной смазкой Molykote P1000, которая при высоких температурах становилась темно-коричневой и обеспечивала хороший контраст с серебристой боковой поверхностью цилиндра. Далее производился нагрев цилиндра, давящих плит и подводящих тяг. При достижении рабочей температуры печь переводилась на режим регулирования, и приблизительно в течение 30 минут производилось выдерживание цилиндра при этой температуре, после чего начиналось его осаживание. По достижению заданного уровня осадки процесс деформирования останавливался, а образец остужался.
Для примеров 2 и 3 применялась установка ИМЕХ-5, состоящая из небольшой нагревательной камеры до 900°C, обеспечивающая нагрев и растяжения постоянным усилием образца в печи. Испытания проводили при 400°C в соответствии с ГОСТ 9651-84 по следующей схеме. Образец, закрепленный в тягах установки, помещался в печь и нагревался до заданной температуры. После выхода температуры на заданный уровень включался фоторегистратор. Проводили нагружение образца до заданного уровня осевого напряжения σ0. Дальнейшее деформирование выполняли в условиях ползучести при постоянной растягивающей нагрузке вплоть до разрушения. В течение всего времени испытаний фоторегистратор производил съемку деформируемого цилиндра через равные промежутки времени или через заданное значение удлинения, управляемое блоком 9. В среднем процесс деформирования фиксируется 300-500 фотографиями, в некоторых испытаниях количество фотографий доходит до 1000.
В примере 2 проводилось растяжение (по ИСО 783-89) плоского образца (см. фиг. 4б) длиной L0, шириной W0 и толщиной D0 между двумя тягами, движущимися в противоположные стороны под действием постоянной нагрузки P0. Деформирование производилось до разрушения образца, с рабочей длиной L0=48 мм, шириной W0=5 мм и толщиной D0=1.3 мм.
В примере 3 производилось растяжение (по ИСО 783-89) цилиндрического образца (см. фиг. 4в) длиной L0=28 мм и диаметром D0=5 мм постоянной во времени силой P0. Деформирование производилось до разрушения образца. Параметры деформирования: P0 = 500 Н, t* ~ 2000 сек.
Предлагаемое техническое решение позволяет построить численный образ реального нагретого объекта (например, цилиндра для примера 1, см. фиг. 6а или образ галтеливидного образца (пример 2) или плоского образца (пример 3) или любого иного) в печи практически в реальном масштабе времени, звдержки связаны со скоростью обработки очередного изображения, что дает возможность исключать проблемы измерения деформации при высокой температуре и измерять большое число параметров образцов при деформировании. В этом случае измерения всех геометрических параметров можно производить по числовому образу, что снижает трудоемкость измерений и повышает информированность об объекте. Пример графического изображения числового образа деформируемого цилиндра приведен на фиг. 6(а), полученного по реальному цилиндру (фиг. 6(б)), находящемуся при высокой температуре в печи. Данный метод имеет существенные преимущества:
1. бесконтактность измерения,
2. большее число измеряемых параметров исследуемого объекта,
3. отсутствие высокотемпературных средств измерения.
Данная система измерения позволила понять процессы, происходящие в зоне контакта боковой поверхности и контактной (для примера 1). В процессе деформирования цилиндра, уширения образца в приконтактной зоне происходит не за счет уширения контактной площадки, а за счет перетекания материала с боковой на контактную поверхность. Процесс перетекания материала по поверхности образца неравномерен. В центральной части происходит медленное движение материала к центру образца, ближе к торцевой части образца скорость увеличивается. Движение материала на контактной поверхности отсутствовало.
Полученные результаты данным методом.
Данное изобретение для примера 3 позволило измерить распределение диаметров образца вдоль рабочей части в любой момент времени. Было проведено два эксперимента на образцах геометрически и физически подобных, при одинаковых силовых и температурных режимах. Эти данные изображены на фиг. 8 (эксперимент 1) и фиг. 9 (эксперимент 2). Фиг. 8 показывает эволюционное изменение рабочей части образца – процесс его утонения и растяжение, которое измерить другими методами было невозможно. Отличительной особенностью процесса деформирования на фиг. 9 является слабое деформирование большую часть времени, и затем быстрое наступление разрушения при локализации деформации. Причинами такого поведения при высокотемпературных испытаниях являются либо относительно высокий перепад температур вдоль рабочей части образца, что исключалось на еще на стадии настройки, либо структурная несовершенность образца в заданном сечении. Данные образцы должны быть признаны браком, но без предварительного рентгенографического исследования данный факт установить невозможно. Данное изобретение позволяет отказаться от дорогостоящего рентгенографического оборудования и отбраковывать такие образцы.
На фиг. 10 показаны траектории движений точек на поверхности образца для примера 2. Рабочая зона образца составляла {-4.5 < x < 4.5 U -28 < y < 28}. На фигуре показаны 11 точек на поверхности, показывающие характерные траектории движения.
В задачах растяжения, при которых имеется возможность появления локализации деформации, данная система измерения позволяет найти и показать локализацию деформаций задолго до того, как ее будет видно невооруженным глазом. В данной области резко повышается действующее напряжение, развитие которой влечет разрушение. Область повышенного напряжения достаточно широкая относительно среднего по образцу. При этом часть образца, занятая шейкой, при t=95% условно составляет 26% длины, а в момент разрушения доходит до 48%. Столь высокая часть образца, затронутая развивающейся шейкой, опровергает предположение многих авторов, что локализация деформации не затрагивает большую часть образца.
Благодаря разработке стало возможным сравнить реально действующее напряжение в образце (задача 3) с напряжением, получающимся при предположении о равномерной деформации вдоль всей рабочей части, как это делается обычно. На фиг. 11 приведены три пары кривых, соответствующие трем экспериментам, при этом цифрами 25, 26, 27 обозначены кривые, соответствующие реальному максимальному напряжению в образце, кривые 28, 29, 30, соответствуют напряжению в образце при предположении, что деформация рабочей части образца происходит равномерно без локализации. Цифрами 31, 32, 33 обозначены моменты времени, при которых начинается значительное расхождение пары кривых. Данный график наглядно иллюстрирует, что предположение о равномерной деформации рабочей части (как это делает в подобных эксперимента) выполняется в среднем только в начале процесса (при t < 30-40%). Расхождения между упомянутыми напряжениями доходят до 100%, что говорит о важности учета истинного распределения напряжений в образце.
Точность измерений. В описанных примерах была использована низкодисперсная низкоаберрационная оптика фирмы NIKKOR. Проведенное независимой лабораторией (http://www.photozone.de/Reviews/252-nikkor-af-80-200mm-f28d-ed-review--test-report) исследование показало максимальное искажение 0.4% дисторсии при фокусном расстоянии 135 мм и 0.7% при 200 мм. Погрешность получаемых линейных размеров оценивалась по сопоставлению длин образца, измеренных оптическим методом и прямым измерением (единственно доступный параметр для контактного измерения) между тягами машины в процессе эксперимента. На фиг. 12 приведены три пары зависимостей удлинения образцов от времени: кривые 34, 35, 36 – соответствуют удлинению образца ΔL1, полученному оптическим методом, а кривые 37, 38, 39 – соответствуют удлинению образца ΔL2, полученному прямыми измерениями. Анализ данных, изображенных на фиг. 12, показывает, что расхождение длин образца, измеренных оптическим методом и прямым измерением, не превышает (ΔL1- ΔL2)/L0 = 3%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения с субпиксельной точностью пиксельных координат центра лазерного пятна маломощного лазера | 2024 |
|
RU2834963C1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ МЕТАЕМОГО ОБЪЕКТА | 2011 |
|
RU2470311C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 1997 |
|
RU2143099C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 1990 |
|
RU2078309C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2381474C2 |
| Способ измерения пространственных координат точек объекта с высокой продольной жёсткостью | 2024 |
|
RU2835117C1 |
| Способ калибровки набора камер для оптического трекинга объектов | 2024 |
|
RU2840933C1 |
| Способ измерения дальности до вагона с помощью видеокамеры | 2023 |
|
RU2811525C1 |
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОРРЕКЦИИ РАЗМЕРА ГОЛОВЫ В 360-ГРАДУСНЫХ ПАНОРАМНЫХ ИЗОБРАЖЕНИЯХ | 2006 |
|
RU2417446C2 |

Изобретение относится к измерительной технике, в частности к бесконтактным средствам и методам измерения параметров деформации объектов. Заявленная система измерения геометрических параметров и/или деформаций образца при высокотемпературном воздействии включает высокотемпературную камеру, выполненную с возможностью размещения в ней образца, смотровое окно, расположенное в стенке камеры с возможностью визуального наблюдения за ним, систему освещения образца, установленную внутри камеры, фоторегистрирующее устройство, установленное с наружной стороны камеры с обеспечением размещения образца в кадре, вычислительное устройство, связанное с фоторегистрирующим устройством. Фоторегистрирующее устройство выполняет обработку изображений, визуализацию результатов обработки и построение трехмерного числового образа образца, по которому осуществляют измерение и вычисление геометрических и деформационных параметров с помощью вычисления координат границ образца на изображении в пиксельной форме с последующей аппроксимацией их прямыми линиями или полиномиальными кривыми, получения координат меток в пиксельной форме и преобразования координат границ и меток образца в метрическую форму. Технический результат - возможность бесконтактного измерения деформаций нагруженного образца и его формы при высоких температурах. 2 н. и 13 з.п. ф-лы, 12 ил.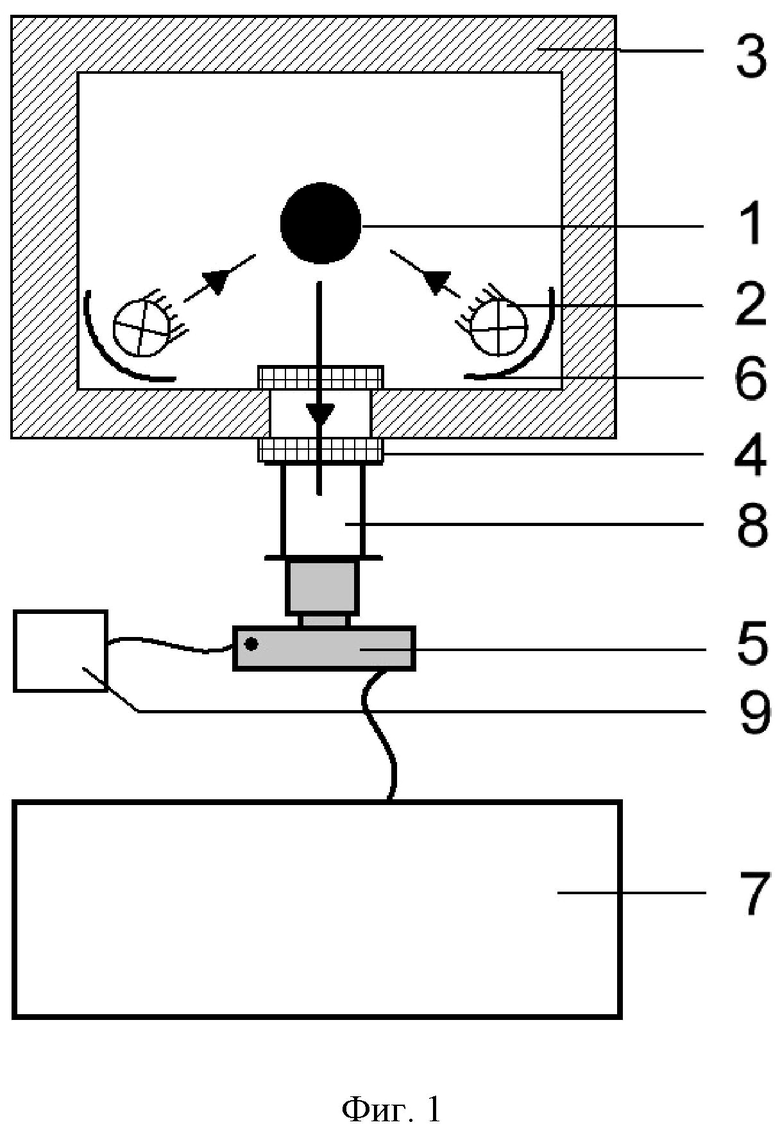
1. Способ измерения геометрических параметров и деформаций образца при высокотемпературном воздействии на него, включающий в себя этапы, на которых
- осуществляют нанесение на поверхность образца реперных точек;
- устанавливают образец в высокотемпературной камере с обеспечением его освещения и визуального доступа к нему из вне;
- выполняют фоторегистрацию изображений образца до начала деформирования образца и в процессе деформирования образца при высокотемпературном воздействии с фиксацией времени получаемых фотоизображений, с последовательной обработкой получаемых изображений, причем обработку каждого изображения осуществляют посредством построения трехмерного числового образа образца, причем построение числового образа образца осуществляют с помощью
- определения координат границ образца на фотоизображении в пиксельной форме с последующим построением аппроксимирующей кривой;
- определения на фотоизображении координат реперных точек в пиксельной форме;
- преобразования координат границ и реперных точек объекта из пиксельной формы в метрическую форму;
- и после чего с использованием данных, характеризующих ось симметричности образца, строят трехмерный (объемный) числовой образ образца;
- осуществляют вычисление геометрических и деформационных параметров на основании полученного трехмерного числового образа образца, в качестве параметров деформации образца используют время с начала деформирования до момента разрушения образца, и/или координаты боковых точек, и/или форму границ образца, и/или координаты реперных точек, и/или значения смещения реперных точек, и/или скорости смещения реперных точек, и/или высоту/длину/ширину образца в произвольных вертикальных/горизонтальных сечениях, и/или величину и положение максимального и минимального бокового смещения/утонения, и/или несимметричность деформирования, и/или бочкообразность/сужение, и/или деформации элементов на поверхности, и/или высоту/ширину образца, и/или радиус продольной касательной окружности к боковой границе образца в месте наибольшего сужения.
2. Способ по п. 1, характеризующийся тем, что регистрацию фотоизображений образца осуществляют через равные промежутки времени или через заданное значение удлинения и/или сужения образца в выбранном направлении.
3. Способ по п. 1, характеризующийся тем, что в качестве реперных точек используют точки пересечения линий в сетке, нанесенной на поверхность образца.
4. Способ по п. 3, характеризующийся тем, что сетка состоит из прямоугольных ячеек размером 1-3 мм.
5. Способ по п. 1, характеризующийся тем, что при фоторегистрации образец располагают в центре кадра, а размер образца на кадре составляет треть кадра по ширине и/или по длине ±10%.
6. Способ по п. 1, характеризующийся тем, что аппроксимирующая кривая представляет собой прямую линию или полиномиальную кривую.
7. Система измерения геометрических параметров и деформаций образца при высокотемпературном воздействии, включающая высокотемпературную камеру, выполненную с возможностью размещения в ней образца, смотровое окно, расположенное в стенке камеры с возможностью визуального наблюдения за ним, систему освещения образца, установленную внутри камеры, фоторегистрирующее устройство, установленное с наружной стороны камеры с обеспечением размещения образца в кадре, вычислительное устройство, связанное с фоторегистрирующим устройством и выполняющее обработку изображений, визуализацию результатов обработки и построение трехмерного числового образа образца, по которому осуществляют измерение и вычисление геометрических и деформационных параметров с помощью вычисления координат границ образца на изображении в пиксельной форме с последующей аппроксимацией их прямыми линиями или полиномиальными кривыми, получения координат меток в пиксельной форме и преобразования координат границ и меток образца в метрическую форму.
8. Система по п. 7, характеризующаяся тем, что смотровое окно выполнено из высокотемпературного оптического кварцевого стекла.
9. Система по п. 7, характеризующаяся тем, что система освещения представляет собой расположенную в печи одну или более ламп, каждая из которых может быть снабжена отражателем на керамических держателях, которые соединены с проволокой из нихрома для подвода электричества.
10. Система по п. 7, характеризующаяся тем, что фоторегистрирующее устройство жестко зафиксировано на окне с помощью соединительного фланца между смотровым окном и объективом фоторегистратора.
11. Система по п. 7, характеризующаяся тем, что в качестве фоторегистрирующего устройства выбран фотоаппарат или видеокамера.
12. Система по п. 7, характеризующаяся тем, что в качестве параметров деформации образца используют время с начала деформирования до момента разрушения образца, и/или координаты боковых точек, и/или форму границ образца, и/или координаты реперных точек, и/или значения смещения реперных точек, и/или скорости смещения реперных точек, и/или высоту/длину/ширину образца в произвольных вертикальных/горизонтальных сечениях, и/или величину и положение максимального и минимального бокового смещения/утонения, и/или несимметричность деформирования, и/или бочкообразность/сужение, и/или деформации элементов на поверхности, и/или высоту/ширину образца, и/или радиус продольной касательной окружности к боковой границе образца в месте наибольшего сужения.
13. Система по п. 7, характеризующаяся тем, что содержит блок управления, связанный с фоторегистрирующим устройством и выполненный с возможностью формирования сигналов срабатывания фоторегистрирующего устройства, генерируемых при изменении удлинения и/или сужения образца в выбранном направлении на заданную величину или через равные промежутки времени.
14. Система по п. 13, характеризующаяся тем, что блок управления включает датчик линейных перемещений, укрепленный на пластине, расположенный таким образом, что позволяет измерять удлинение и/или сужение образца в выбранном направлении, электронную систему обработки сигналов от датчика, возникающих вследствие деформаций образца, модуль управления кнопкой спуска фоторегистрирующего устройства, а также модуль индикации измеряемых и управляемых параметров.
15. Система по п. 7, характеризующаяся тем, что высокотемпературная камера имеет диапазон рабочих температур до 900°C.
| Локощенко А.М., Терауд В.В | |||
| Метод регистрации и измерения деформаций при температуре на основе фотоаппарата | |||
| Общие вопросы двигателестроения | |||
| Вестник двигателестроения, N2/2012 (УДК 531.715.27) | |||
| CN 106197290 A, 07.12.2016 | |||
| US 2014160279 A1, 12.06.2014 | |||
| RU 93042088 A, 27.02.1996. |

