Изобретение относится к радиосвязи и может быть использовано для формирования фазоманипулированных, амплитудно-манипулированных, а также амплитудно-фазоманипулированных сигналов, а также АЧХ и ФЧХ манипуляторов с их аппроксимацией путем интерполяции на заданном количестве частот.
Известен способ манипуляции (модуляции) параметров отраженного сигнала, состоящий в том, что входное сопротивление устройства манипуляции изменяют таким образом, что коэффициент отражения этого устройства изменяет фазу на π, π/2, π/4, причем для разделения входного и отраженного сигналов используют циркулятор [Радиопередающие устройства. / Под редакцией О.А. Челнокова - М.: Радио и связь, 1982, стр.152-156]. Известно устройство реализации этого способа [там же], состоящее из циркулятора, первый вход которого подключен к источнику сигнала, третий вход подключен к нагрузке, а второй подключен к отрезку разомкнутой линии передачи длиной λ/4, в начале которой включен p-i-n диод.
Если диод закрыт, то от сечения, в котором он включен, происходит отражение, отраженная волна попадает в нагрузку с сопротивлением 50 Ом. Если диод открыт, то отражение происходит от конца линии. Фаза отраженного сигнала в одном состоянии диода отличается от фазы отраженного сигнала в другом состоянии диода на π. При необходимости изменения разности фаз длина отрезка линии передачи изменяется соответствующим образом.
Недостатком этого способа и устройства его реализации является то, что в двух состояниях диода изменяется только фаза отраженного сигнала, причем заданные значения разности фаз отраженного сигнала в двух состояниях диода обеспечиваются только на одной фиксированной частоте. Другим недостатком является постоянство амплитуды отраженного сигнала в двух состояниях диода, одной несущей частоте [один канал можно образовать с помощью манипуляции амплитуды, а другой с помощью манипуляции фазы, или не позволяет обеспечить кодировку передаваемой информации]. Третьим недостатком следует считать большие массы и габариты, связанные с необходимостью использования отрезков линии передачи. Четвертым недостатком является то, что устройство манипуляции, состоящее из управляемой и неуправляемой частей, включается между источником сигнала и нагрузкой, которые имеют определенные значения сопротивлений. Источник сигнала имеет чисто действительное сопротивление (второй вход). Нагрузка для отраженного сигнала (третий вход) имеет также действительное сопротивление. Манипулятор подключен к разомкнутой (бесконечное сопротивление) или замкнутой к (нулевое сопротивление) линии передачи. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы проходного сигнала.
Известен способ манипуляции фазы отраженного сигнала, основанный на использовании двухимпедансных устройств СВЧ [В.Г. Соколинский, В.Г. Шейнкман. Частотные и фазовые модуляторы и манипуляторы. - М.: Радио и связь, 1983, стр.146-158]. Известно устройство реализации этого способа [там же], состоящее из определенного количества реактивных элементов типа L, C параметры которых выбраны из условия обеспечения требуемой произвольной разности фаз коэффициента отражения.
По сравнению с предыдущими способом и устройством данный способ и устройство его реализации не требуют использования полупроводниковых диодов только в открытом и только закрытом состояниях. При любых состояниях диодов, определяемых двумя уровнями низкочастотного управляющего воздействия, при определенных значениях параметров типа L, C может быть обеспечено заданное значение разности фаз отраженного сигнала на фиксированной частоте. Если амплитуда управляющего низкочастотного сигнала между указанными двумя уровнями изменяется непрерывно, то обеспечивается модуляция.
Основными недостатками данного способа и устройства его реализации являются отсутствие возможности обеспечения требуемых значений разности фаз и отношения модулей коэффициентов отражения в двух состояниях управляемого элемента на двух и более частотах. Другим недостатком является то, что, как и первый способ и устройство, манипулятор может быть включен только между определенными сопротивлениями. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы проходного сигнала.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ [Головков А.А. Устройство для модуляции отраженного сигнала. Авт. св-во №1800579 от 09.10 1992 года], состоящий в том, что неуправляемую часть (согласующе-фильтрующее устройство) формирует из определенным образом соединенных между собой двухполюсников, сопротивление каждого двухполюсника выбирают из условия обеспечения одинакового заданного двухуровневого закона изменения амплитуды и фазы отраженного сигнала на двух частотах при изменении управляемого элемента из одного состояния в другое под действием управляющего низкочастотного напряжения или тока.
Известно устройство (прототип) реализации способа [там же], содержащее циркулятор, первое и третье плечи которого являются СВЧ входом и выходом, а во второе плечо включены реактивный четырехполюсник и полупроводниковый диод, подключенный к источнику низкочастотного управляющего воздействия, при этом четырехполюсник выполнен в виде Т-образного соединения двухполюсников со значениями реактивных сопротивлений, которые выбраны из условия обеспечения требуемых одинаковых законов двухуровневого изменения амплитуды и фазы отраженного сигнала на двух заданных частотах. Так же, как и в предыдущих способе и устройстве его реализации, возможна модуляция фазы и амплитуды, если управляющий сигнал изменяется непрерывно. При этом амплитуда и фаза проходного сигнала изменяется по неизвестному закону или совсем не изменяется.
К основным недостаткам данного способа и устройства относятся отсутствие возможности реализации разных заданных законов изменения амплитуды и фазы отраженного сигнала на двух и более заданных значениях частот, что уменьшает функциональные возможности и объем передаваемой информации. Другим недостатком является то, что, как и в первых двух способах и устройствах, манипулятор может быть включен только между определенными сопротивлениями. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают заданные законы манипуляции амплитуды и фазы проходного сигнала.
Техническим результатом изобретения является обеспечение требуемых разных законов изменения амплитуды и фазы проходного сигнала на заданном количестве фиксированных частот при включении манипулятора между произвольными сопротивлениями при одновременном уменьшении массогабаритных характеристик.
Указанный результат достигается тем, что в способе многочастотной модуляции амплитуды и фазы сигналов, состоящем в том, что манипулятор разделяют на управляемую и неуправляемую части, включают их между источником сигналов и нагрузкой, неуправляемую часть манипулятора формируют из определенным образом соединенных между собой двухполюсников, каждый из двухполюсников формируют из необходимого количества реактивных элементов, параметры которых выбирают из условия обеспечения двухуровневого изменения амплитуды и фазы сигналов при изменении импедансов управляемой части манипулятора из одного состояния в другое под действием двухуровневого управляющего низкочастотного напряжения или тока на фиксированных частотах, дополнительно импедансы источника сигнала и нагрузки выбирают произвольно, количество фиксированных частот выбирают произвольно, количество двухполюсников выбирают равным двум, количество реактивных элементов, формирующих двухполюсники неуправляемой части, и значения их параметров выбирают из условия обеспечения заданных разных законов изменения амплитуды и фазы проходного сигнала на выбранном количестве фиксированных частот.
Указанный результат достигается тем, что в устройстве реализации способа многочастотной модуляции амплитуды и фазы сигналов, содержащем источник сигналов, к которому подключен реактивный четырехполюсник и полупроводниковый диод, подключенный к источнику низкочастотного управляющего сигнала, включенному в поперечную цепь, дополнительно четырехполюсник выполнен в виде  -образного соединения двух реактивных двухполюсников, сопротивление источника сигналов выбрано произвольным, полупроводниковый диод включен в продольную цепь, параллельно источнику низкочастотного управляющего сигнала включена нагрузка для проходного СВЧ сигнала с произвольными импедансами на двух заданных частотах, а двухполюсники с сопротивлениями x1n, x2n -образного соединения выполнены из последовательно соединенных между собой последовательного и параллельного колебательных контуров, при этом реактивные сопротивления двухполюсников на каждой из двух заданных частот ω1, ω2 и параметры параллельного контура L1, C1 выбраны из следующих математических выражений:
-образного соединения двух реактивных двухполюсников, сопротивление источника сигналов выбрано произвольным, полупроводниковый диод включен в продольную цепь, параллельно источнику низкочастотного управляющего сигнала включена нагрузка для проходного СВЧ сигнала с произвольными импедансами на двух заданных частотах, а двухполюсники с сопротивлениями x1n, x2n -образного соединения выполнены из последовательно соединенных между собой последовательного и параллельного колебательных контуров, при этом реактивные сопротивления двухполюсников на каждой из двух заданных частот ω1, ω2 и параметры параллельного контура L1, C1 выбраны из следующих математических выражений:




где k=1, 2 - номер двухполюсника считая со стороны источника СВЧ сигнала; n=1, 2 - номер частоты;


r0n, x0n - действительные и мнимые части комплексного сопротивления источника сигнала, различные на каждой из двух частот; rнn, хнn - действительные и мнимые части комплексного сопротивления нагрузки для проходного сигнала, различные на каждой из двух частот; r1n,2n, х1n,2n - действительные и мнимые части комплексного сопротивления управляемого элемента в двух состояниях, определяемых двумя уровнями тока и напряжения источника низкочастотного управляющего сигнала, различные на каждой из двух частот; m21n, ϕ21n - заданные отношения модулей и разность фаз коэффициентов передачи в двух состояниях управляемого элемента на двух частотах; параметры L2, C2 последовательного контура выбраны произвольно.
Указанный результат достигается тем, что в предыдущем устройстве реализации способа многочастотной модуляции амплитуды и фазы сигналов четырехполюсник выполнен в виде  -образного соединения двух двухполюсников, при этом реактивные сопротивления двухполюсников на каждой из двух частот выбраны в соответствии со следующими математическими выражениями:
-образного соединения двух двухполюсников, при этом реактивные сопротивления двухполюсников на каждой из двух частот выбраны в соответствии со следующими математическими выражениями:
X1n=-x0n-θ1; 

Указанный результат достигается тем, что в первом устройстве реализации способа многочастотной модуляции амплитуды и фазы сигналов количество частот выбрано равным трем, а каждый из двух двухполюсников -образного соединения выполнен из последовательно соединенных конденсатора с емкостью С0, параллельного колебательного контура с параметрами L1, C1 и двухполюсника с реактивным сопротивлением x0, при этом параметры С0, L1, C1 выбраны с помощью следующих математических выражений:



где

П2=ω2ω3Xk2Xk3(ω2Xk2-ω3Xk3);

ω1, ω2, ω3 - заданные фиксированные частоты; Xk1=хk1-x0(ω1); Xk2=хk2-x0(ω2); Xk3=хk3-x0(ω3); Xk1, Xk2, Xk3 - реактивные сопротивления последовательно соединенных емкости С0 и параллельного колебательного контура с параметрами L1, C1; хk1, хk2, хk3 - реактивные сопротивления последовательно соединенных емкости С0, параллельного контура с параметрами L1, C1 и двухполюсника с реактивным сопротивлением x0 на трех заданных частотах, при этом двухполюсник с реактивным сопротивлением x0 формируется из произвольного количества соединенных любым образом реактивных элементов с произвольными значениями параметров L, C.
Указанный результат достигается тем, что в предыдущем устройстве реализации способа многочастотной модуляции амплитуды и фазы сигналов четырехполюсник выполнен в виде -образного соединения двух двухполюсников, при этом реактивные сопротивления двухполюсников на каждой из трех частот выбраны в соответствии со следующими математическими выражениями:
X1n=-x0n-θ1; 
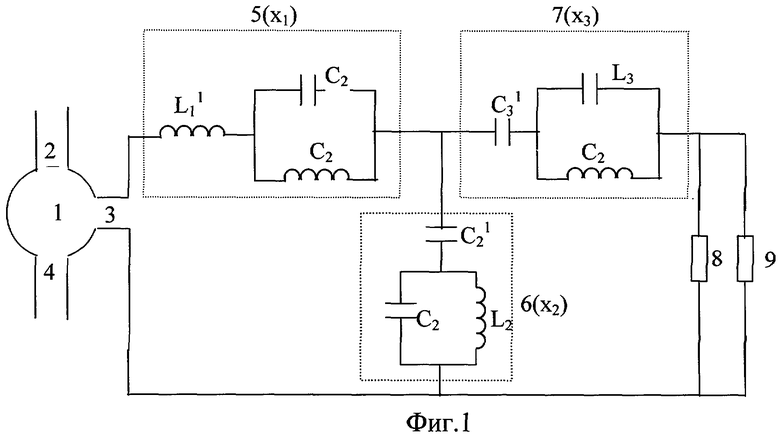
На фиг.1 показана схема устройства модуляции амплитуды и фазы сигналов, реализующего способ-прототип.
На фиг.2 приведена схема первого предлагаемого устройства модуляции амплитуды и фазы проходного сигнала, реализующего предлагаемый способ многочастотной модуляции, для случая n=1, 2.
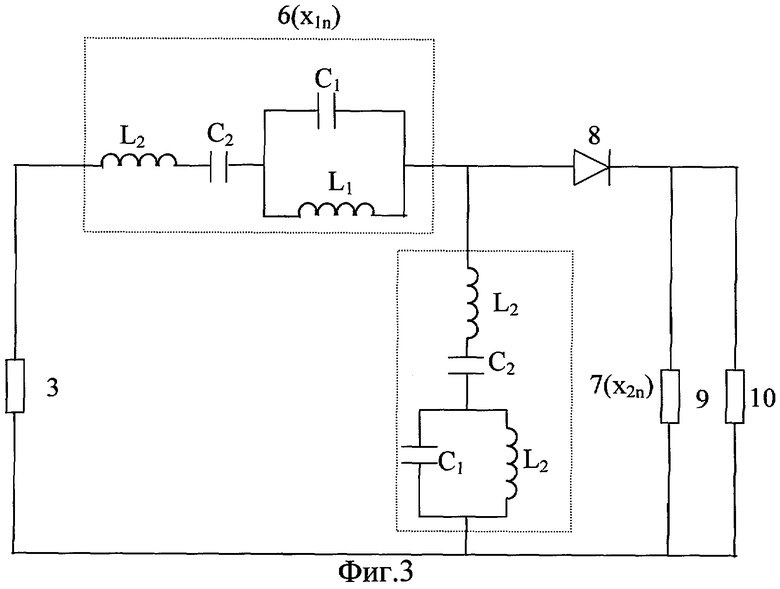
На фиг.3 изображена схема второго предлагаемого устройства модуляции амплитуды и фазы проходного сигнала, реализующего предлагаемый способ многочастотной модуляции, для случая n=1, 2.
На фиг.4 представлена схема третьего предлагаемого устройства модуляции амплитуды и фазы проходного сигнала, реализующего предлагаемый способ многочастотной модуляции, для случая n=1, 2, 3.
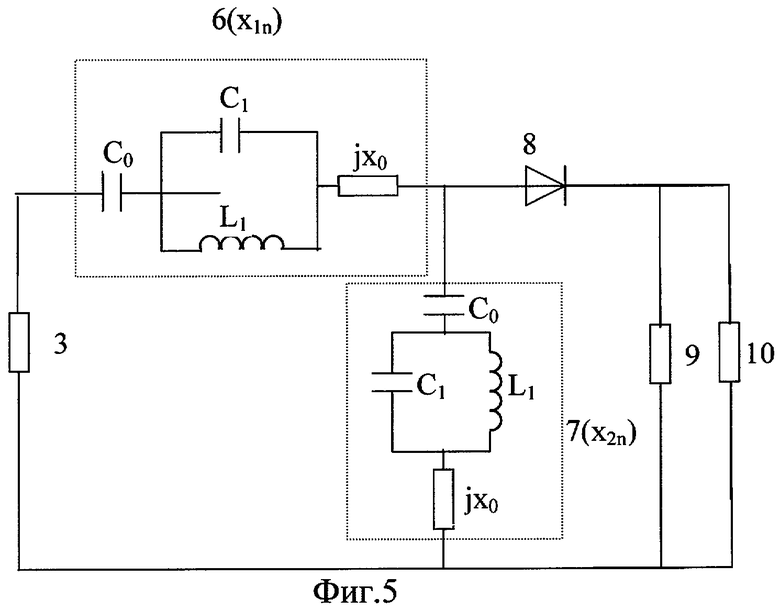
На фиг.5 сформирована схема четвертого предлагаемого устройства модуляции амплитуды и фазы проходного сигнала, реализующее предлагаемый способ многочастотной модуляции, для случая n=1, 2, 3.
Устройство-прототип содержит циркулятор 1 с входным 2, нагрузочным 3 и выходным 4 плечами, три двухполюсника с реактивными сопротивлениями x1, x2, x3, соединенных между собой по Т-схеме, а также полупроводниковый диод 8, подключенный параллельно к источнику сигнала модуляции 9, двухполюсник 7 подключен к диоду 8, двухполюсник 5 - к нагрузочному плечу 3 циркулятора 1.
Принцип действия устройства манипуляции параметров сигнала, реализующего способ-прототип состоит в следующем.
Сигнал от задающего генератора (на фиг.1 не показан) через входное плечо 2 циркулятора 1 поступает в нагрузочное плечо 3. В результате взаимодействия пришедшего сигнала с реактивными элементами и диодом и благодаря специальному выбору значений реактивных элементов двухполюсников значения фаз и амплитуд отраженных сигналов на двух частотах оказываются такими, что в результате их интерференции на выходное плечо 4 циркулятора 1 поступают сигналы, амплитуда и фаза которых в одном состоянии диода 8, определяемом одним крайним значением сигнала модуляции источника 9, отличаются от амплитуды и фазы этих сигналов в другом состоянии диода 8 на одинаковые заданные величины на соответствующих двух частотах. Максимальная девиация фазы может составлять 360°, минимальная - ноль, максимальное отношение амплитуд равно ∞.
Предлагаемые четыре устройства модуляции параметров сигнала (фиг.2-5) содержат источник сигнала 3, два двухполюсника с реактивными сопротивлениями x1n, x2n, соединенных между собой по  - схеме, а также полупроводниковый диод 8, включенный в продольную цепь и подключенный к источнику сигнала модуляции 9, двухполюсник 7 подключен к диоду 8, двухполюсник 6 - к источнику сигнала. К источнику сигнала модуляции (управляющего сигнала) подключена нагрузка 10 для проходного сигнала. Нагрузкой может является, например, антенна.
- схеме, а также полупроводниковый диод 8, включенный в продольную цепь и подключенный к источнику сигнала модуляции 9, двухполюсник 7 подключен к диоду 8, двухполюсник 6 - к источнику сигнала. К источнику сигнала модуляции (управляющего сигнала) подключена нагрузка 10 для проходного сигнала. Нагрузкой может является, например, антенна.
Эти устройства функционируют следующим образом. Благодаря специальному выбору количества реактивных элементов двухполюсников, схемы их соединений и значений их параметров при переключении управляющего (модулирующего) сигнала на диоде будет одновременно происходить манипуляция амплитуды и фазы проходного сигнала на заданном количестве частот в общем случае различными законами двухуровневого изменения амплитуды и фазы. При непрерывном изменении амплитуды управляющего сигнала будет реализована модуляция проходного сигнала по амплитуде и фазе в общем случае по произвольным законам.
Докажем возможность реализации указанных свойств.
Пусть на фиксированной частоте известны сопротивления источника сигнала z0=r0+jx0, нагрузки zн=rн+jxн и управляемого элемента z1,2=x1,2+jx1,2 в двух состояниях, определяемых уровнями управляющего воздействия.
Требуется определить структуру схемы, минимальное количество элементов и значения параметров, при которых переключение управляемого элемента из одного состояния в другое однозначно приводило бы к изменению модулей и фаз коэффициентов отражения и передачи по следующим законам на каждой из заданных частот. Рассмотрим случай одной частоты [Головков А.А., Минаков В.Г. Взаимосвязи между элементами матрицы сопротивлений и их использование для синтеза согласующе-фильтрующих устройств амплитудно-фазовых манипуляторов. Телекоммуникации, №8, 2004, с.29-32]:

где  ; ϕ21=ϕ21 '-ϕ21 '' - требуемые отношение модулей и разность фаз коэффициентов передачи S21 ', S21 '' в двух состояниях управляемого элемента.
; ϕ21=ϕ21 '-ϕ21 '' - требуемые отношение модулей и разность фаз коэффициентов передачи S21 ', S21 '' в двух состояниях управляемого элемента.
Пусть управляемый элемент включен в продольную цепь между СФУ и нагрузкой, причем в СФУ предполагается использовать только реактивные элементы так, что оно характеризуется матрицей сопротивления
и соответствующей классической матрицей передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971, 388 с.]:
где |х|=-x11x22-х21 2 - определитель матрицы (2).
Управляемый элемент в двух состояниях характеризуется следующей матрицей передачи.
Перемножим матрицы (3) и (4), и с учетом z0, zн [там же] запишем нормированную матрицу передачи всего устройства:
Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния [там же], с учетом (5) получим выражения для коэффициента передачи:

Подставим (6) в (1) и разделим действительную и мнимую части в полученном комплексном уравнении между собой:

[xH(x11+x0)-r0rH-x0x22-x11х22-x21 2](1-m21cosϕ21)+(x11+x0)(x2-х1m21cosϕ21)-r0(r2-r1m21cosϕ21)-m21sinϕ21[(x11+x0)(rH+r1)+r0(xH+х1)-r0x22]=0.
Решение этой системы имеет следующий вид:
х11=D1x22+F1-x0;

где


Полученные два соотношения (8) между элементами матрицы сопротивления СФУ амплитудно-фазового манипулятора означают, что количество неуправляемых элементов должно быть не менее двух. Значения параметров этих элементов, оптимальных по критерию обеспечения требуемых значений m21, ϕ21, должны удовлетворять системе двух уравнений, формируемых на основе (8). Для этого необходимо взять пробную схему СФУ, найти матрицу сопротивлений этой схемы и представить ее в виде (2). Полученные таким образом элементы х11, x22, x21, выраженные через параметры схемы, нужно подставить в (8) и решить сформированную систему двух уравнений относительно выбранных двух параметров.
Остальные параметры при этом относятся к управляемой части и участвуют в формировании z1, z2, т.е. входят в коэффициенты D, Е, F.
Условия физической реализуемости заданных значений m21, ϕ21 вытекают из обеспечения положительности подкоренного выражения в (8).
Поскольку Е2+FD=-r0 2, то это условие сводится к требованию D<0.
Из последнего неравенства следует ограничение на ϕ21:

Из выражения (9) по тем же соображениям следует ограничение на 

где 
 - качество управляемой части манипулятора с учетом действительной части сопротивления нагрузки.
- качество управляемой части манипулятора с учетом действительной части сопротивления нагрузки.
В соответствии с описанным алгоритмом для n-частоты получены выражения для схем СФУ  -образного (фиг.2, 4) и
-образного (фиг.2, 4) и  -образного (фиг.3, 5) соединений трех двухполюсников, при которых предлагаемые устройства модуляции с заданными значениями m21, ϕ21 и m11 ϕ11.
-образного (фиг.3, 5) соединений трех двухполюсников, при которых предлагаемые устройства модуляции с заданными значениями m21, ϕ21 и m11 ϕ11.
Для -образного соединения:

Для ┐-образного соединения:
X1n=-x0n-θ1; 

В выражениях (11), (12) элементы x11, x21 и х22 определяются формулами (8). Обеспечение положительности подкоренных выражений в (11), (12) являются условиями физической реализуемости соответствующих схем. Структура схем определяется следующим образом. Если в формулах (11)-(12) Xk>0 (k=1, 2), то это индуктивность Lk=Xk/ω (ω=2πf). Если Xk<0, то это емкость  (k - номер двухполюсника).
(k - номер двухполюсника).
Реализация требуемых частотных характеристик в двух состояниях легко может быть осуществлена путем интерполяции на двух, трех и т.д. частотах. Для этого необходимо каждый из двухполюсников, входящих в схему СФУ (фиг.2-5), сформировать из элементов L1, C1 таким образом, чтобы он обеспечивал на заданных частотах требуемые значения сопротивлений, рассчитанные по формулам (11)-(12) для этих же частот. При этом коэффициенты D, E, F также рассчитываются для соответствующей частоты, что учитывается ее номером n. Здесь приводятся два решения таких задач. Для двух заданных частот предлагается сформировать двухполюсники из последовательно соединенных между собой параллельного и последовательного колебательных контуров. Сопротивления такого двухполюсника на двух частотах определяются выражениями:

Решение системы двух уравнений (13) определяет параметры L1, C1 параллельного контура:


где k=1, 2 - номер двухполюсника; n=1, 2 - номер частоты.
В выражениях (14) параметры L, C могут быть выбраны произвольно исходя из каких-либо физических соображений, например из условия обеспечения минимума отклонений заданных характеристик в заданной полосе частот или исходя из условия физической реализуемости схем.
Для трех заданных частот предлагается формировать двухполюсники из последовательно соединенных емкости С0, параллельного контура L1, C1 и реактивного двухполюсника с сопротивлением jx0. При этом параметры определяются из решения системы трех уравнений:

Решение имеет вид:



где

П2=ω2ω3Xk2Xk3(ω2Xk2-ω3Xk3);

Xk1=xk1-х0(ω1); Хk2=хk2-х0(ω2); Хk3=хk3-х0(ω3); Хk1, Хk2, Хk3 - реактивные сопротивления последовательно соединенных емкости С0 и параллельного колебательного контура с параметрами L1, C1; хk1, xk2, xk3 - реактивные сопротивления последовательно соединенных емкости С0, параллельного контура с параметрами L1, C1 и двухполюсника с реактивным сопротивлением x0 на трех заданных частотах, при этом двухполюсник с реактивным сопротивлением x0 формируется из произвольного количества соединенных любым образом реактивных элементов с произвольными значениями параметров L, С; ω1, ω2, ω3 - заданные фиксированные частоты.
Реактивное сопротивление jx0 двухполюсника формируется произвольным образом или исходя из каких-либо физических соображений, например исходя из условия обеспечения минимума отклонений характеристик в полосе частот.
Полученные решения (14) и (16) для двух и трех заданных частот могут быть использованы как в -образной схеме соединения двух двухполюсников, так и в -образной. Поэтому вариантов предлагаемых устройств реализации предлагаемого способа многочастотной модуляции амплитуды и фазы проходного сигнала может быть всего четыре.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестны способы одновременной многочастотной манипуляции параметров проходного сигнала на заданном количестве частот и устройства реализации, состоящие из определенным образом соединенных определенного количества реактивных элементов L, C с определенными по соответствующим математическим выражениям параметрами.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (формирование неуправляемой части определенным образом соединенных между собой двухполюсников из условия обеспечения двухуровневого изменения амплитуды и фазы проходного сигнала на заданном количестве частот при изменении состояния управляемого элемента, включенного в продольную цепь при произвольных значениях сопротивлений источника сигнала и нагрузок) и заявленные схемы соединений элементов L, C, формирующих двухполюсник, и математические выражения для определения их параметров обеспечивают реализацию требуемых разных законов изменения амплитуды и фазы проходного сигнала на заданном количестве фиксированных частот при включении модулятора между произвольными сопротивлениями при одновременном уменьшении массогабаритных размеров за счет исключения циркулятора и уменьшения количества двухполюсников.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы полупроводниковые диоды, например p-i-n диоды, варикапы и т.д., серийно выпускаемые промышленностью индуктивности и емкости, сформированные в заявленные схемы двухполюсников  -образных соединений. Значения параметров емкостей и индуктивностей однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
-образных соединений. Значения параметров емкостей и индуктивностей однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенных способа и устройств его реализации заключается в реализации требуемых разных законов изменения амплитуды и фазы проходного сигнала на заданном количестве фиксированных частот при включении модулятора между произвольными сопротивлениями при одновременном уменьшении массогабаритных размеров за счет исключения циркулятора и уменьшения количества двухполюсников.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОЧАСТОТНОЙ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2294051C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2291554C1 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2291553C1 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2305876C2 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2341867C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2006 |
|
RU2350010C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2006 |
|
RU2341865C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2006 |
|
RU2341868C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2006 |
|
RU2341014C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2006 |
|
RU2341013C2 |

Изобретение относится к радиосвязи и может быть использовано для формирования фазоманипулированных, амплитудно-манипулированных, а также амплитудно-фазоманипулированных сигналов. Технический результат - обеспечение требуемых законов изменения амплитуды и фазы проходного сигнала на заданном количестве фиксированных частот при включении манипулятора между произвольными сопротивлениями. Сущность изобретения заключается в том, что манипулятор разделяют на управляемую и неуправляемую части, включают их между источником сигналов и нагрузкой, неуправляемую часть манипулятора формируют из определенным образом соединенных между собой двухполюсников, каждый из двухполюсников формируют из необходимого количества реактивных элементов, параметры которых выбирают из обеспечения двухуровневого изменения амплитуды и фазы сигналов и фиксированных частотах интерполяции требуемых частотных характеристик при изменении импеданса управляемой части манипулятора из одного состояния в другое под воздействием двухуровневого управляющего низкочастотного напряжения или тока, при этом количество фиксированных частот выбирают произвольно, импедансы источника сигнала и нагрузки выбирают произвольными, количество двухполюсников выбирают равным двум, количество реактивных элементов, формирующих двухполюсники неуправляемой части, и значения их параметров выбирают из условия одновременного обеспечения заданных разных законов изменения амплитуды и фазы проходного сигнала на выбранном количестве фиксированных частот. 2 н.п. ф-лы, 5 ил.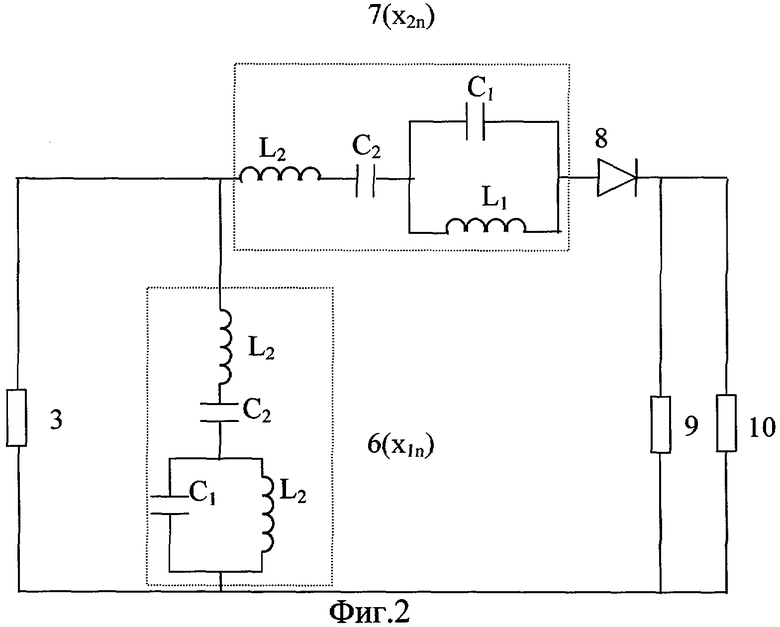
 -образного соединения двух двухполюсников, полупроводниковый диод включен в продольную цепь, количество частот интерполяции частотных характеристик выбрано равным двум, а двухполюсники с сопротивлениями x1n, x2n выполнены из последовательно соединенных между собой последовательного и параллельного колебательных контуров, при этом реактивные сопротивления двухполюсников на каждой из двух заданных частот ω1, ω2 и параметры параллельного контура L1, C1 выбраны из следующих математических выражений:
-образного соединения двух двухполюсников, полупроводниковый диод включен в продольную цепь, количество частот интерполяции частотных характеристик выбрано равным двум, а двухполюсники с сопротивлениями x1n, x2n выполнены из последовательно соединенных между собой последовательного и параллельного колебательных контуров, при этом реактивные сопротивления двухполюсников на каждой из двух заданных частот ω1, ω2 и параметры параллельного контура L1, C1 выбраны из следующих математических выражений:





где k=1, 2 - номер двухполюсника, считая со стороны источника сверхвысокочастотного сигнала; n=1, 2 - номер частоты;


где ron, x0n - действительные и мнимые части комплексного сопротивления источника сигнала, различные на каждой из двух частот;
rнn, xнn - действительные и мнимые части комплексного сопротивления нагрузки для проходного сигнала, различные на каждой из двух частот;
r1n,2n, x1n,2n - действительные и мнимые части комплексного сопротивления управляемого элемента в двух состояниях, определяемых уровнями тока или напряжения источника низкочастотного управляющего сигнала, различные на каждой из двух частот;
m21, ϕ21n - заданные отношения модулей и разность фаз коэффициента передачи на двух частотах;
параметры L2,С2 последовательного контура выбраны произвольно.
| Устройство для модуляции отраженного сигнала | 1990 |
|
SU1800579A1 |
| RU 2003215 C1, 15.11.1993 | |||
| Амплитудный модулятор СВЧ | 1983 |
|
SU1142880A1 |
| Балансный модулятор СВЧ | 1984 |
|
SU1195412A1 |
| Радиопередающие устройства, под ред | |||
| ЧЕЛНОКОВА О.А., Москва, Радио и связь, 1982, с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| СОКОЛИНСКИЙ В.Г., ШЕЙКМАН В.Г., Частотные и фазовые манипуляторы, Москва, Радио и связь, 1983, с.146-158. | |||

