Изобретение относится к горной промышленности, а именно к средствам механизации выемки полезных ископаемых и, может быть использовано в системе автоматического регулирований и управления электрогидроприводом исполнительного органа фронтального агрегата.
Известно устройство управления двухдвигателъным электроприводом подачи исполнительного органа очистного комбайна, размещенного на направляющей с возможностью поступательного перемещения с помощью бесконечной тяговой цепи /Бабокин Г.И., Щуцкий В.И., Серов В.И. /Частотно-регулируемый электропривод горных машин и установок" Н.: Издательский центр РХТУД998, с.145-146, рис.5.5/.
Электропривод содержит два асинхронных электродвигателя, роторы которых через редукторы и звездочки соединены с тяговой цепью с возможностью перемещения исполнительного органа по направляющей.
Устройство управления включает первый и второй преобразователи частоты, регуляторы частоты, датчики нагрузки, блок выравнивания нагрузок первого и второго электродвигателей, блок задания частоты вращения. Входы преобразователей частоты присоединены к силовой сети, а выходы - соответственно к обмоткам статоров первого и второго электродвигателей. К входам преобразователей частоты подключены выходы регуляторов частоты. К выходам первого и второго преобразователей частоты подключены датчики нагрузки, выходы которых соединены с двумя входами блока выравнивания нагрузок, а два выхода этого блока соединены с регуляторами частоты. Выход блока задания частоты связан с регуляторами частоты.
Недостатком данного устройства является то, что при изменении скорости подачи исполнительного органа по направляющей и постоянной скорости резания изменяется глубина резания h, а шаг резания t - расстояние между соседними линиями резания - остается неизменным. Поэтому отношение t/h при регулировании скорости подачи изменяется в широком диапазоне. При малых и повышенных значениях t/h удельные затраты энергии исполнительным органом увеличиваются по сравнению с минимальным значением при оптимальном отношении t/h. Таким образом, объект имеет экстремальную характеристику зависимости удельных энергозатрат от величины отношения t/h, но известное устройство не обеспечивает поддержание оптимального значения t/h. Кроме того, устройство не исключает возможности возрастания сопротивления движению исполнительного органа по направляющей за счет ее изгиба в плоскости пласта и связанных с этим дополнительных затрат энергии.
Наиболее близким к предлагаемому является устройство управления приводом исполнительного органа фронтального агрегата /Патент РФ №2246615, МПК7, Е 21 С 35/24, Е 21 D 9/093, БИ №5 от 20.02.2005 г.
Привод содержит три асинхронных электродвигателя, причем первый и второй электродвигатели связаны через редукторы приводными звездочками бесконечной тяговой цепи, оснащенной струговыми каретками с возможностью перемещения их по направляющей, гидроцилиндры перемещения направляющей на забой, первый и второй гидронасосы с постоянными рабочими объемами, связанными через механическую передачу с третьим электродвигателем, причем к их выходам подключены предохранительные гидроклапаны.
Устройство управления содержит первый и второй преобразователи частоты, входы которых связаны с силовой сетью. Выход первого преобразователя частоты связан с первым электродвигателем, выход второго преобразователя - со вторым и третьим электродвигателями. К входам преобразователей частоты присоединены выходы и второго регуляторов частоты. К выходам преобразователей частоты подключены датчики нагрузки, выходы которых соединены с блоком выравнивания нагрузки, два выхода которого связаны с входами первого регулятора частоты.
С входами первого и второго регуляторов частоты связан выход регулятора нагрузки, входы которого соединены с блоком задания нагрузки и с выходом второго датчика нагрузки.
Первый и второй выходы каждого гидрораспределителя управления связаны с соответствующим гидроцилиндром перемещения направляющей на забой, а третий и четвертый его выходы - с гидравлическим блоком. Один из входов гидрораспределителя управления связан со сливной гидромагистралью, а другой - с напорной гидромагистралью, присоединенной к выходу первого гидронасоса. Выход второго гидронасоса соединен с электрогидравлическим блоком, включающим два двухпозиционных гидрораспределителя с четырьмя электромагнитами управления, связанными с четырьмя выходами блока управления. Входы блока управления связаны с выходом второго преобразователя и с блоком сигнала начальной установки. Два выхода электромагнитного блока связаны с гидролиниями управления, которые соединены с входами каждого гидравлического блока.
Автоматическое поддержание заданного уровня нагрузки при одновременном ее выравнивании на двух электродвигателях повышает использование установленной мощности привода и производительность фронтального агрегата. Устройство обеспечивает также поддержание прямолинейности направляющей для движения струговых кареток, что дополнительно приводит к снижению энергозатрат.
Взаимосвязанное изменение частоты вращения всех трех электродвигателей обеспечивает пропорциональное изменение скорости движения струговых кареток по направляющей /скорости резания/ и скорости подачи направляющей на забой. Благодаря этому поддерживается постоянство отношения t/h и снижаются удельные затраты энергии.
Однако при неизменном шаге резания, как это имеет место для исполнительного органа фронтального агрегата, оптимальная глубина резания не является постоянной величиной. Ее значение зависит от ряда факторов и прежде всего от физико-механических свойств полезного ископаемого, которые существенно изменяются как по длине очистного забоя, так и выемочного столба. Поэтому минимизация удельных затрат энергии может быть обеспечена только при регулировании и поддержании оптимального значения t/h в процессе работы исполнительного органа за счет изменения в некотором диапазоне глубины резания. Невозможность регулирования отношения t/h является недостатком известного устройства, что снижает производительность фронтального агрегата.
Задачей предлагаемого изобретения является минимизация удельных затрат энергии исполнительным органом при одновременном повышении производительности фронтального агрегата.
Сущность данного изобретения заключается в том, что оно снабжено блоком переключения каналов, расходомером, блоком задания вынимаемой мощности пласта, блоком задания длины очистного забоя, блоком перемножения, блоком деления, экстремальным регулятором, блоком формирования управляющего сигнала, асинхронным однофазным электродвигателем, винтовой передачей в виде винта и гайки, причем первый и второй объемные гидронасосы включают механизмы регулирования их рабочих объемов, первый вход блока переключения каналов подключен к выходу регулятора нагрузки, а первый его выход соединен с первыми входами первого второго регуляторов частоты, расходомер включен в напорную гидромагистраль, его выход связан с первым входом блока перемножения, второй и третий входы которого соединены соответственно с выходом блока задания вынимаемой мощности пласта и выходом блока задания длины очистного забоя, выход блока перемножения связан с первым входом блока деления, второй вход которого с выходом второго датчика нагрузки, выход блока деления связан с первым входом экстремального регулятора, второй вход которого соединен с выходом блока формирования управляющего сигнала, выход экстремального регулятора соединен с вторым входом блока переключения каналов, второй выход которого соединен с обмоткой однофазного асинхронного электродвигателя, ротор которого соединен винтом с винтовой передачей, гайка которой связана с входами механизмов регулирования рабочих объемов первого и второго гидронасосов.
На чертеже изображена схема устройства управления приводом исполнительного органа фронтального агрегата.
Устройство управления приводом исполнительного органа фронтального агрегата содержит первый и второй асинхронные электродвигатели 1 и 2, связанные через редукторы 3 и 4 с приводными звездочками 5 и 6 бесконечной тяговой цепи 7, оснащенной струговыми каретками 8, с возможностью перемещения их по направляющей 9.
С каждой секцией направляющей 9 соединены штоки гидроцилиндров 10 перемещения этой направляющей на забой /на схеме условно показан один гидроцилиндр/. Третий асинхронный электродвигатель 11 через механическую передачу 12 связан с первым и вторым объемными гидронасосами 13 к 14, снабженными механизмами регулирования их рабочих объемов. К выходам гидронасосов 13 и 14 подключены соответственно предохранительные гидроклапаны 15 и 16.
Устройство управления приводом исполнительного органа содержит первый и второй преобразователи частоты 17 и 18, входы которых соединены с электрической силовой сетью, а выходы - соответственно с обмотками статоров электродвигателей 1 и 2. К преобразователям частоты 17 и 18 подключены управляющие выходы регуляторов частоты 19 и 20. К выходам преобразователей частоты 17 и 18 подключены датчики нагрузки 21 и 22. Выход второго преобразователя частоты 18 на участке до входа датчика нагрузки 22 соединен также с обмоткой статора третьего электродвигателя 11. Выход датчика нагрузки 22 связан с входом регулятора нагрузки 23, второй вход которого соединен с блоком задания нагрузки 24. Выход регулятора нагрузки 23 соединен с первым входом блока переключения каналов 25, первый выход которого связан с первым входом регуляторов частоты 19 и 20.
Выходы датчиков нагрузки 21 и 22 соединены с двумя входами блока выравнивания нагрузки 26, первый и второй выходы которого соединены соответственно с третьим и вторым входами регулятора частоты 19.
Поршневая и штоковая полости каждого гидроцилиндра перемещения 10 соединены с первым и вторым выходами гидрораспределителями управления 27, входы которого соединены с напорной 28 и сливной 29 гидромагистралями. К напорной гидромагистрали 28 подключен выход первого гидронасоса 13.
Третий и четвертый выходы каждого гидрораспределителя управления 27 связаны с соответствующим гидравлическим блоком 30, два других входа которого соединены с первой и второй гидролиниями управления 31 и 32. С первым входом электрогидравлического блока 33 соединен выход второго гидронасоса 14, второй вход этого блока соединен со сливной гидролинией 34. Выходы электрогидравлического блока 33 связаны с гидролиниями управления 31 и 32. Блок управления 35 подключен к выходу второго преобразователя частоты 18, второй его вход соединен с блоком сигнала начальной установки 36, а первый, второй, третий и четвертый его выходы соединены с соответствующими входами электрогидравлического блока 33.
Расходомер 37 включен в напорную гидромагистраль 28, а его выход соединен с первым входом блока перемножения 38. Второй и третий входы блока перемножения 38 соединены соответственно с блоком задания вынимаемой мощности пласта 39 и блоком задания длины очистного забоя 40. Выход блока перемножения 38 связан с блоком деления 41, второй вход которого соединен с выходом датчика нагрузки 22.
Выход блока деления 41 соединен с первым входом экстремального регулятора 42, второй вход которого соединен с блоком формирования управляющего сигнала 43. Выход экстремального регулятора 42 связан со вторым входом блока переключения каналов 25, второй выход которого соединен с обмоткой статора однофазного асинхронного электродвигателя 44. Ротор электродвигателя 44 соединен с винтом 45 винтовой передачи 46, гайка 47 которой связана с входами механизмов регулирования рабочих объемов гидронасосов 13 и 14.
Устройство управления приводом исполнительного органа работает следующим образом.
Устройство осуществляет регулирование двух параметров привода: нагрузки электродвигателей 1 и 2 и удельных затрат энергии исполнительным органом фронтального агрегата. Поэтому в устройстве предусмотрены два канала управления. Для исключения конфликтных ситуаций, когда устройство в одно и то же время по каждому из каналов управления пытается передать два противоположных сигнала на гидроцилиндры 10 перемещения направляющей 9 на забой, служит блок переключения каналов 25. Блок 25 обеспечивает автоматическое периодическое включение первого канала при одновременном выключении второго канала, и наоборот, причем возможно также регулирование соотношения длительности периодов включения первого и второго каналов управления.
В установившемся режиме скорость перемещения струговых кареток 8 по направляющей 9 /скорость резания/ с помощью бесконечной тяговой цепи 7 определяется частотой вращения первого и второго электродвигателей 1 и 2, передаточным отношением редукторов 3 и 4, а также радиусом звездочек 5 и 6.
Частота вращения электродвигателей 1 и 2 определяется частотой переменного тока, поступающего на обмотки статоров этих электродвигателей от преобразователей частоты 17 и 18.
Скорость подачи направляющей 9 на забой определяется скоростью выдвижения штоков 10 и зависит от объема рабочей жидкости, поступающей в единицу времени в поршневую полость каждого гидроцилиндра 10 из напорной гидромагистрали 28 через гидрораспределитель управления 27, установленный в позицию А.
Расход рабочей жидкости через напорную гидромагистраль 28 определяется производительностью первого гидронасоса 13, которая зависит от рабочего объема насоса, значение которого определяется положением механизма регулирования рабочего объема, передаточного отношения механической передачи 12 и частоты вращения третьего электродвигателя 11. Частота вращения электродвигателя 11 определяется частотой переменного тока, поступающего в обмотку статора электродвигателя 11 от второго преобразователя частоты 18.
Сопротивление движению нижней и верхней ветвей тяговой цепи 7 со струговыми каретками 8 может быть различным из-за переменной крепости полезного ископаемого по мощности пласта. При этом нагрузка /ток/ электродвигателя 1 будет больше или меньше нагрузки /тока/ электродвигателя 2. Сигналы, пропорциональные нагрузке электродвигателей 1 и 2, поступают от датчиков нагрузки 21 и 22 на входы блока выравнивания нагрузки 26. Если ток электродвигателя 2 будет больше тока электродвигателя 1, то на выхода блока 26, связанном с третьим входом регулятора частоты 19, появится сигнал со знаком "+", что приведет к увеличению частоты питания электродвигателя 1 до тех пор, пока токи электродвигателей 1 и 2 сравняются.
Если ток электродвигателя 1 превысит ток электродвигателя 2, то на выходе блока 26, связанном со вторым входом регулятора частоты 19, появится сигнал со знаком "-", что приведет к снижению частоты питания электродвигателя 1 и уменьшению потребляемого им тока до значения тока электродвигателя 2.
Для подачи направляющей 9 на забой гидрораспределители управления 27 устанавливаются в позицию А. При этом напорная гидромагистраль 28 соединяется с поршневой полостью каждого гидроцилиндра перемещения 10. Для синхронизации скоростей движения штоков гидроцилиндров 10, подключенных параллельно к напорной гидромагистрали 28, и обеспечения прямолинейности направляющей 9 в плоскости пласта, штоковая полость каждого гидроцилиндра 10 через гидрораспределитель 27 соединяется с первым входом, а сливная гидромагистраль 29 - со вторым входом гидравлического блока 30.
Блок управления 35 вырабатывает управляющие импульсы, частота следования которых определяется частотой переменного тока на выходе преобразователя частоты 18 и в определенной последовательности распределяет их по четырем входам электрогидравлического блока 33. При этом выход гидронасоса 14, соединенный с электрогидравлическим блоком 33, поочередно подключается к гидролиниям управления 31 или 32, в то время как соответствующие гидролинии управления 32 или 31 соединяются со сливной гидролинией 34. Под действием импульсов давления рабочей жидкости, поступающих поочередно на третий или четвертый входы гидравлического блока 30, последний осуществляет дозирование единичных объемов рабочей жидкости, вытесняемых за один такт из штоковой полости гидроцилиндра 10 и поступающих в сливную гидромагистраль 29.
Частота управляющих импульсов в данный момент для всех гидравлических блоков 30 одинакова, а единичные объемы вытесняемой рабочей жидкости постоянны, поэтому скорости перемещения штоков гидролиндров 10 будут равными, независимо от величины действующих нагрузок. Благодаря этому обеспечивается поддержание прямолинейности направляющей 9 в плоскости пласта.
Если при изменении крепости полезного ископаемого фактический ток электродвигателя 2, измеряемый датчиком нагрузки 22, отклонится от заданного значения тока, определяемого блоком задания нагрузки 24, то на выходе регулятора нагрузки 23 появится пропорциональный сигнал, который поступает на первый вход блока переключения каналов 25. Если в данный момент к этому входу подключен первый выход блока переключения каналов 25, то сигнал поступает на первый вход регуляторов частоты 19 и 20, которые воздействуют на преобразователи частоты 17 и 18. Последние уменьшают или увеличивают частоту переменного тока, подводимого к электродвигателям 1 в 2, а также к электродвигателю 11, что приводит к соответствующему изменению частоты вращения этих электродвигателей. В результате в ту или иную сторону изменяется скорость перемещения струговых кареток 8 по направляющей 9 /скорость резания/. Вместе с тем, изменяется частота вращения гидронасосов 13 и 14, а также их производительности. Одновременно пропорционально изменяется частота управлявших импульсов, поступающих на электрогидравлический блок 33 и гидравлические блоки 30. В итоге изменяется количество рабочей жидкости, поступающей через напорную гидромагистраль 28 в поршневую полость каждого гидроцилиндра 10, а также вытесняемой из него через гидравлический блок 30 в сливную гидромагистраль 29. Соответственно, уменьшается или возрастает скорость подачи направляющей 9 на забой. В результате пропорционального изменения скоростей резания и подачи обеспечивается снижение или увеличение нагрузки электродвигателей 1 и 2 до заданного уровня при одновременном сохранении постоянства отношения t/h, соответствующего заданному положению механизмов регулирования рабочих объемов гидронасосов 13 и 14.
Если необходимо одномоментно выключить подачу направляющей 9 на забой, то с блока сигнала начальной установки 36 подается сигнал, под действием которого с выхода блока управления 35 поступают управляющие сигналы на отключение с помощью электрогидравлического блока 33 гидролиний управления 31 и 32, а следовательно, и гидравлических блоков 30. Слив рабочей жидкости из штоковых полостей гидроцилиндров 10 в сливную магистраль 29 прекращается, и их поршни останавливаются. При этом давление рабочей жидкости на выходе гидронасосов 13 и 14 ограничивается за счет срабатывания предохранительных гидроклапанов 15 и 16, перепускающих рабочую жидкость на слив.
Для включения подачи направляющей 9 на забой прекращают подачу сигнала с блока 36, и блок управления 35 начинает вырабатывать управляющие импульсы для переключения электрогидравличекого блока 33. Предохранительные гидроклапаны 15 и 16 закрываются и устройство управления приводом исполнительного органа начинает функционировать в указанной выше последовательности.
При длительных перерывах в работе гидрораспределители 27 устанавливаются в нейтральную позицию С. При переключении распределителей 27 в позиции В или D происходит включение и реверсирование гидроцилиндров 10, например, для периодического устранения накапливающихся в процессе эксплуатации фронтального агрегата ошибок в прямолинейности направляющей 9 в плоскости пласта.
При отключении первого канала управления блоком переключения каналов 25 регуляторы частоты 19 и 20 в совокупности с преобразователями частоты 17 и 18 фиксируют частоту переменного тока на выходе последних, имевшую место к моменту отключения, поэтому электродвигатели 1,2 и 11 вращаются с постоянной частотой.
При включении второго канала управления блоком переключения каналов 25 отыскание оптимального значения t/h, обеспечивающего минимальные удельные затраты энергии исполнительным органом фронтального агрегата, осуществляется следующим образом.
В блок задания вынимаемой мощности пласта 39 и блок задания длины очистного забоя 40 периодически по мере изменения этих параметров вводятся соответствующие исходные данные. С выходов блоков 39 и 40 пропорциональные сигналы поступают на входы блока перемножения 38. С выхода расходомера 37 на вход блока перемножения 38 поступает также сигнал, пропорциональный фактической скорости подачи направляющей 9 на забой. После перемножения сигнал, пропорциональный производительности исполнительного органа за единицу времени, с выхода блока 38 поступает на вход блока деления 41. На другой вход этого блока от датчика нагрузки 22 поступает сигнал, пропорциональный мощности, потребляемой электродвигателем 2. На выходе блока деления 41 формируется сигнал, пропорциональный частному от деления мощности электродвигателя 2 на производительность исполнительного органа, т.е. удельным затратам энергии.
Этот сигнал поступает на вход экстремального регулятора 42, на второй вход которого с блока 43 поступает управляющий сигнал. В экстремальном регуляторе 42 образуется сигнал разности управляющего сигнала и сигнала, пропорционального удельным энергозатратам. Под действием этой разности сигналов формируется поисковый сигнал, который после усиления поступает с выхода экстремального регулятора 42 на второй вход блока переключения каналов 25. Так как этот вход соединен с вторым выходом блока переключения каналов 25, то поисковый сигнал поступает на вход однофазного асинхронного электродвигателя 44. Ротор электродвигателя 44 совершает знакопеременное вращательное движение, передающееся на винт 45 винтовой передачи 46. В результате гайка 47 совершает возвратно-поступательное колебательное движение, которое передается на вход связанных с гайкой 47 механизмов регулирования рабочих объемов гидронасосов 13 и 14.
Благодаря этому при постоянной частоте вращения электродвигателей 1,2 и 11 и неизменной скорости резания колебательно изменяются производительности гидронасосов 13 и 14 и скорость подачи направляющей 9 на забой. Следовательно, экстремальный регулятор 42 обеспечивает организацию изменения отношения t/h таким образом, чтобы отыскивать и удерживать переменную t/h в рабочей точке, соответствующей экстремальному /минимальному/ значению удельных затрат энергии исполнительным органом фронтального агрегата.
После истечения периода включения второго канала управления блок переключения каналов 25 включает первый канал управления и отключает однофазный электродвигатель 44 от выхода экстремального регулятора 42. При этом фиксируется положение гайки 47 винтовой передачи 46 и механизмов регулирования рабочих объемов гидронасосов 13 и 14, а также обеспечивается поддержание установленного оптимального значения отношения t/h. Устройство управления в дальнейшем обеспечивает стабилизацию нагрузки электродвигателей 1 и 2 с помощью регулятора нагрузки 23 при установленном оптимальном значении t/h и минимальных удельных затратах энергии исполнительным органом в течение периода включения первого канала.
Для максимального повышения производительности фронтального агрегата длительность периода включения первого канала управления должна быть существенно больше длительности включения второго канала управления.
Таким образом, предлагаемое введение дополнительных блоков и элементов в сочетании с изменением и введением дополнительных связей между блоками и элементами устройства управления приводом исполнительного органа позволяет минимизировать удельные затраты энергии за счет периодического регулирования отношения t/h и фиксации его оптимального значения, что в сочетании с автоматической стабилизацией нагрузки электродвигателей привода струговых кареток одновременно обеспечивает повышение производительности фронтального агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |
| НАСОСНАЯ СТАНЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165528C1 |
| Исполнительный орган фронтального агрегата | 1983 |
|
SU1105637A1 |
| Устройство для управления горным комбайном со стреловидным исполнительным органом | 1982 |
|
SU1151669A1 |
| Управляемый стволопроходческий комбайн | 1985 |
|
SU1373811A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2008 |
|
RU2393091C2 |
| УНИВЕРСАЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ ПОДВЕСНОЙ ТРУБНЫЙ КЛЮЧ | 2003 |
|
RU2244800C1 |
| Гидропривод бурильной установки | 1991 |
|
SU1788230A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
Изобретение относится к горной промышленности и может быть использовано в системе автоматического регулирования и управления электрогидроприводом исполнительного органа фронтального агрегата. Техническим результатом является минимизация удельных затрат энергии исполнительным органом при одновременном увеличении производительности фронтального агрегата. Для этого устройство содержит первый, второй и третий асинхронные электродвигатели, причем первый и второй электродвигатели через редукторы связаны с приводными звездочками бесконечной тяговой цепи, оснащенной струговыми каретками с возможностью их перемещения по направляющей, гидроцилиндры перемещения направляющей на забой, механическую передачу, первый и второй предохранительные гидроклапаны, первый и второй объемные гидронасосы, первый и второй преобразователи частоты, первый и второй регуляторы частоты, датчики нагрузки, блок выравнивания нагрузок, регулятор нагрузки, блок задания нагрузки, блок управления, блок сигнала начальной установки, гидрораспределители управления гидроцилиндрами перемещения направляющей на забой, гидравлические блоки, электрогидравлический блок, блок переключения каналов, расходомер, блок задания вынимаемой мощности пласта, блок задания длинны очистного забоя, блок перемножения, блок деления, экстремальный регулятор, блок формирования управляющего сигнала, асинхронный однофазный электродвигатель, винтовую передачу в виде винта и гайки. Причем первый и второй объемные гидронасосы включают механизмы регулирования их рабочих объемов. 1 ил.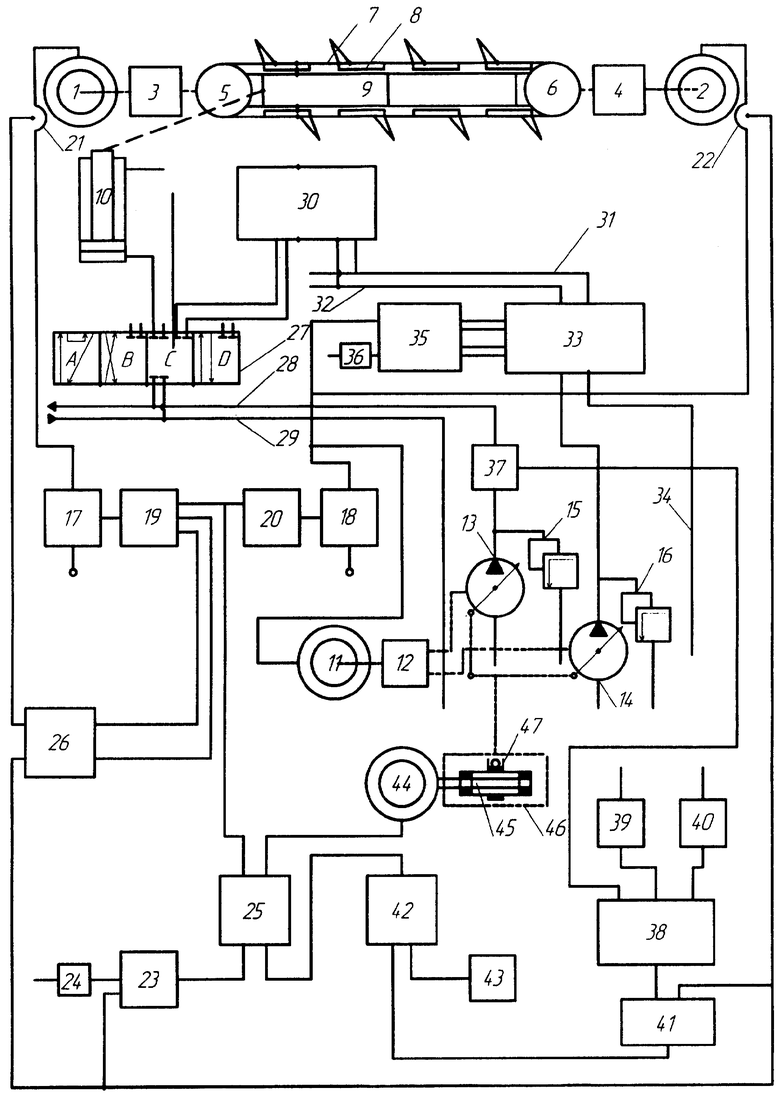
Устройство управления приводом исполнительного органа фронтального агрегата, включающим первый, второй и третий асинхронные электродвигатели, причем первый и второй электродвигатели через редукторы связаны с приводными звездочками бесконечной тяговой цепи, оснащенной струговыми каретками с возможностью их перемещения по направляющей, гидроцилиндры перемещения направляющей на забой, механическую передачу, первый и второй предохранительные гидроклапаны, первый и второй объемные гидронасосы, связанные через механическую передачу с третьим электродвигателем, причем входы первого и второго предохранительных гидроклапанов подключены соответственно к выходам этих гидронасосов, содержащее первый и второй преобразователи частоты, входы которых соединены с электрической силовой сетью, выход первого преобразователя частоты соединены с обмоткой статора первого электродвигателя, выход второго преобразователя частоты связан с обмотками статоров второго и третьего электродвигателей, первый и второй регуляторы частоты, выходы которых соединены с управляющими входами соответственно первого и второго преобразователей частоты, датчики нагрузки, подключенные к выходам первого и второго преобразователей частоты, блок выравнивания нагрузок, подключенный к выходам датчиков нагрузок, причем первый и второй его выходы связаны соответственно с третьим и вторым входами первого регулятора частоты, регулятор нагрузки, блок задания нагрузки, причем блок задания нагрузки соединен с первым входом регулятора нагрузки, второй его вход связан с выходом датчика нагрузки второго электродвигателя, блок управления, блок сигнала начальной установки, причем первый вход блока управления связан с выходом второго преобразователя частоты, а второй его вход соединен с блоком сигнала начальной установки, гидрораспределители управления гидроцилиндрами перемещения направляющей на забой, гидравлические блоки, причем входы каждого гидрораспределителя управления соединены с напорной и сливной гидромагистралями, напорная гидромагистраль подключена к выходу первого объемного гидронасоса, первый и второй выходы гидрораспределителя управления соединены с поршневой и штоковой полостями гидроцилиндра перемещения, а третий и четвертый выходы гидрораспределителя управления соединены с первым и вторым входами каждого гидравлического блока, электрогидравлический блок, причем первый его вход соединен с выходом второго гидронасоса, второй вход соединен со сливной гидролинией, первый и второй его выходы соединены с первой и второй гидролиниями управления, связанными с третьим и четвертым выходами каждого гидравлического блока, причем первый, второй, третий и четвертый выходы блока управления связаны с соответствующими входами электрогидравлического блока, отличающееся тем, что оно снабжено блоком переключения каналов, расходомером, блоком задания вынимаемой мощности пласта, блоком задания длины очистного забоя, блоком перемножения, блоком деления, экстремальным регулятором, блоком формирования управляющего сигнала, асинхронным однофазным электродвигателем, винтовой передачей в виде винта и гайки, причем первый и второй объемные гидронасосы включают механизмы регулирования их рабочих объемов, первый вход блока переключения каналов подключен к выходу регулятора нагрузки, а первый его выход соединен с первыми входами первого и второго регуляторов частоты, расходомер включен в напорную гидромагистраль, его выход связан с первым входом блока перемножения, второй и третий входы которого соединены соответственно с выходом блока задания вынимаемой мощности пласта и выходом блока задания длины очистного забоя, выход блока перемножения связан с первым входом блока деления, второй вход которого - с выходом второго датчика нагрузки, выход блока деления связан с первым входом экстремального регулятора, второй вход которого соединен с выходом блока формирования управляющего сигнала, выход экстремального регулятора соединен с вторым входом блока переключения каналов, второй выход которого соединен с обмоткой однофазного асинхронного электродвигателя, ротор которого соединен винтом с винтовой передачей, гайка которой связана с входами механизмов регулирования рабочих объемов первого и второго гидронасосов.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |

