Изобретение относится к горной промышленности, а именно к средствам механизации выемки полезных ископаемых, и может быть использовано в системе автоматического регулирования и управления электрогидроприводом исполнительного органа фронтального агрегата.
Известно устройство управления электроприводом очистного комбайна /Серов В.И., Бабокин Г.И., Колесников Е.Б. Система управления частотно-регулируемым электроприводом подачи комбайна. Известия вузов. Горный журнал, 1992, 6, с. 93-96. /, содержащее датчик нагрузки асинхронного нерегулируемого электродвигателя исполнительного органа, преобразователь частоты, регулятор нагрузки, блок задания сигнала. Вход преобразователя частоты подключен к сети, а выход соединен с обмоткой статора электродвигателя механизма подачи. Датчик нагрузки подключен ко входу электродвигателя исполнительного органа, а его выход соединен с регулятором нагрузки, выход которого соединен со вторым входом преобразователя частоты. Выход блока задания сигнала соединен со вторым входом регулятора нагрузки.
Недостатком известного устройства является то, что при регулировании скорости подачи и постоянной скорости резания изменяется толщина стружки, а шаг резания - расстояние между соседними линиями резания - остается неизменным. Поэтому отношение шага резания к толщине стружки при регулировании скорости подачи изменяется в широком диапазоне, а наименьшие удельные затраты энергии обеспечиваются только при определенном оптимальном соотношении шага резания и толщины стружки. В связи с этим данное устройство не обеспечивает поддержания минимума удельных затрат энергии на отделение угля от массива, что приводит к снижению возможной производительности очистного комбайна.
Наиболее близким к предлагаемому является устройство управления двухдвигательным электроприводом подачи исполнительного органа очистного комбайна, размещенного на направляющих с возможностью поступательного перемещения с помощью бесконечной тяговой цепи /Бабокин Г.И., Щуцкий В.И., Серов В. И. Частотно-регулируемый электропривод горных машин и установок. М.: Издательский центр РХТУ, 1998, с. 145-146, рис. 5.5/. Электропривод содержит два асинхронных электродвигателя, роторы которых через редукторы и звездочки соединены с тяговой цепью, с возможностью перемещения исполнительного органа по направляющей.
Устройство включает первый и второй преобразователи частоты, регуляторы частоты, датчики нагрузки, блок выравнивания нагрузок первого и второго электродвигателей, блок задания частоты вращения. Блок выравнивания нагрузок содержит сумматор, первый и второй компараторы, первый и второй ключи, блок выделения модуля сигнала, регулятор выравнивания нагрузок. Входы преобразователей частоты присоединены к силовой сети, а выходы - соответственно к обмоткам статора первого и второго электродвигателей. К выходам первого и второго преобразователей частоты подключены датчики нагрузки, выходы которых соединены со входами сумматора блока выравнивания нагрузки. Выход сумматора соединен с первым и вторым компараторами, а выходы последних связаны со входами соответственно первого и второго ключей. Выходы этих ключей соединены с двумя входами регуляторов частоты. С выходом сумматора соединен блок выделения модуля сигнала, выход которого связан с регулятором выравнивания нагрузок. Выход последнего соединен со входами ключей.
Выход блока задания частоты связан с регуляторами частоты.
При выравнивании нагрузки двух асинхронных электродвигателей повышается использование установленной мощности очистного комбайна.
Недостатком данного устройства, как и предыдущего, является то, что при изменении скорости подачи исполнительного органа по направляющей и постоянной скорости резания изменяется отношение шага резания к толщине стружки, что приводит к повышению удельных затрат энергии на отделение угля от массива. Кроме того, устройство не исключает возможности возрастания сопротивления движению исполнительного органа по направляющей за счет ее изгиба в плоскости пласта и связанных с этим дополнительных затрат энергии.
Задачей предлагаемого изобретения является повышение производительности фронтального агрегата за счет стабилизации нагрузки электродвигателей привода и одновременном снижении удельных затрат энергии при отделении угля от массива, а также затрат энергии при движении исполнительного органа по направляющей.
Поставленная задача решается таким образом, что в устройство управления приводом исполнительного органа фронтального агрегата, включающем два асинхронных электродвигателя, связанных через редукторы с приводными звездочками бесконечной тяговой цепи, оснащенной струговыми каретками с возможностью их перемещения по направляющей, содержащее первый и второй преобразователи частоты, входы которых соединены с электрической силовой цепью, а выходы связаны с обмоткой статора соответственно первого и второго электродвигателей, первый и второй регуляторы частоты, выходы которых соединены с управляющими входами соответственно первого и второго преобразователей частоты, датчики нагрузки, подключенные к выходам первого и второго преобразователей частоты, блок выравнивания нагрузок, включающий сумматор, первый и второй компараторы, первый и второй ключи, блок выделения модуля сигнала, регулятор выравнивания нагрузок, причем сумматор подключен к выходам датчиков нагрузки, выход сумматора соединен со входами первого и второго компараторов и блока выделения модуля сигнала, выходы компараторов связаны соответственно с первым и вторым ключами, выходы которых соединены соответственно с третьим и вторым входами первого регулятора частоты, выход блока выделения модуля сигнала соединен со входом регулятора выравнивания нагрузок, выход которого соединен со входами первого и второго ключей, дополнительно введены регулятор нагрузки, блок задания нагрузки, блок управления, блок сигнала начальной установки, гидроцилиндры перемещения направляющей на забой, гидрораспределители управления гидроцилиндрами перемещения, электрогидравлические блоки, включающие объемный дозатор, первый и второй двухпозиционные распределители соответственно с первым и вторым, третьим и четвертым электромагнитами управления.
При этом блок задания нагрузки соединен со входом регулятора нагрузки, второй вход которого соединен с датчиком нагрузки второго электродвигателя, выход регулятора нагрузки соединены с первыми входами первого и второго регуляторов частоты. Входы каждого гидрораспределителя управления гидроцилиндром перемещения направляющей соединены с напорной и сливной гидромагистралями, первый и второй выходы распределителя управления соединены с поршневой и штоковой полостями гидроцилиндров, третий и четвертый выходы его соединены с первым и вторым входами первого и второго двухпозиционных распределителей, а их первый и второй выходы соединены с противоположными полостями объемного дозатора каждого электрогидравлического блока. Первый вход блока управления связан с выходом второго преобразователя частоты, второй его вход соединен с блоком сигнала начальной установки, а первый, второй, третий и четвертый выходы блока управления соединены соответственно с первым и вторым, третьим и четвертым электромагнитами управления двухпозиционными гидрораспределителями электрогидравлических блоков.
Сущность данного изобретения поясняется чертежом, где изображена схема устройства управления приводом исполнительного органа фронтального агрегата.
Привод исполнительного органа фронтального агрегата включает первый и второй асинхронные двигатели 1 и 2, связанные через редукторы 3 и 4 приводными звездочками 5 и 6 бесконечной тяговой цепи 7, оснащенной, например, струговыми каретками 8 с возможностью их перемещения по направляющей 9.
Устройство управления приводом исполнительного органа содержит первый и второй преобразователи частоты 10 и 11, входы которых соединены с электрической силовой сетью, а выходы - соответственно с обмотками статора первого и второго электродвигателей 1 и 2.
К преобразователям частоты 10 и 11 подключены управляющие выходы регуляторов частоты 12 и 13. К выходам преобразователей частоты 10 и 11 подключены датчики нагрузки 14 и 15. Выход датчика нагрузки 15 соединен со входом регулятора нагрузки 16, вход которого связан с блоком задания нагрузки 17. Выход регулятора нагрузки 16 соединен с первым входом регуляторов частоты 12 и 13.
Блок выравнивания нагрузок 18 включает сумматор 19, первый и второй компараторы 20 и 21, первый и второй ключи 22 и 23, блок выделения модуля сигнала 24, регулятор выравнивания нагрузок 25. Выходы датчиков нагрузки 14 и 15 соединены с сумматором 19, выход которого соединен с компараторами 20 и 21, а выходы последних связаны со входами соответственно ключей 22 и 23. Выходы ключей 22 и 23 соединены соответственно с третьим и вторым входами регуляторами частоты 12. С выходом сумматора 19 соединен также блок выделения модуля сигнала 24, выход которого связан с регулятором нагрузок 25. Вход последнего соединен со входами ключей 22 и 23.
Штоки гидроцилиндров 26 перемещения направляющей 9 на забой связаны с каждой секцией этой направляющей (на схеме условно показан 1 гидроцилиндр). Поршневая и штоковая полости каждого гидроцилиндра 26 соединены с первым и вторым выходами гидрораспределителя управления 27, входы которого соединены с напорной 28 и сливной 29 гидромагистралями.
Электрогидравлический блок 30 включает первый и второй двухпозиционные гидрораспределители 31 и 32 с управлением соответственно от первого 33 и второго 34, третьего 35 и четвертого 36 электромагнитов и объемный дозатор 37. Третий и четвертый выходы гидрораспределителя 27 связаны с первым и вторым входами двухпозиционных распределителей 31 и 32 каждого электрогидравлического блока 30, а их первый и второй выходы соединены с противоположными полостями объемного дозатора 37.
Блок управления 38 подключен к выходу преобразователя частоты 11, второй его вход соединен с блоком сигнала начальной установки 39. Первый, второй, третий и четвертый выходы блока управления 38 соединены соответственно с электромагнитами 33, 34, 35 и 36 каждого электрогидравлического блока 30.
Устройство управления приводом исполнительного органа фронтального агрегата работает следующим образом.
В установившемся режиме работы скорость перемещения исполнительного органа в виде, например, струговых кареток 8 вдоль забоя (скорость резания) по направляющей 9 с помощью бесконечной тяговой цепи 7 определяется частотой вращения асинхронных электродвигателей 1 и 2 с короткозамкнутыми роторами, передаточным отношением редукторов 3 и 4, а также радиусом приводных звездочек 5 и 6. Частота вращения электродвигателей определяется в свою очередь частотой переменного тока, поступающего на обмотки статора этих электродвигателей от преобразователей частоты 10 и 11.
Скорость передачи направляющей 9 на забой определяется скоростью выдвижения штоков гидроцилиндров 26 и зависит от объема рабочей жидкости, поступающей в единицу времени в поршневую полость каждого гидроцилиндра из напорной гидромагистрали 28 через гидрораспределитель 27, установленный в позицию А. При этом штоковая полость гидроцилиндра 26 через гидрораспределитель 27 соединяется и первыми входами двухпозиционных гидрораспределителей 31 и 32 каждого гидравлического блока 30.
Блок управления 38 вырабатывает прямоугольные управляющие импульсы, частота следования которых определяется частотой переменного тока на выходе преобразователя частоты 11 и в определенной последовательности распределяет их по линиям связи с электрогидравлическими блоками 30. При подаче управляющих импульсов к электромагнитам 33 и 36 гидрораспределитель 31 устанавливается в правую позицию, а гидрораспределитель 32 в левую позицию. При этом рабочая жидкость из штоковой полости гидроцилиндра 26 поступает в правую полость объемного дозатора 37, поршень которого перемещается влево, и гидроцилиндр 26 сливает в гидромагистраль 29 объем рабочей жидкости, равный рабочему объему дозатора 37. Под действием давления рабочей жидкости, подводимой к поршневой полости гидроцилиндра 26 через первый выход гидрораспределителя 27, шток гидроцилиндра 26 перемещается на забой на соответствующую величину.
Со следующим управляющим тактом включаются электромагниты 34 и 35. Гидрораспределитель 31 переключается в левую позицию, а гидрораспределитель 32 в правую позицию. Рабочая жидкость из штоковой полости гидроцилиндра 26 поступает в левую полость объемного дозатора 37, а из правой его полости рабочая жидкость вытесняется в сливную гидромагистраль 29. В результате шток гидроцилиндра 26 вновь перемещается совместно с направляющей 9 на забой. Со следующим управляющим тактом вновь включаются электромагниты 33 и 36 и т.д. Следовательно, выдвижение штоков всех гидроцилиндров 26 осуществляется синхронно и скорость подачи направляющей 9 на забой определяется частотой следования управляющих импульсов.
Если, например, при увеличении крепости угля фактический ток электродвигателя 2, измеряемый датчиком нагрузки 15, превысит заданный, то на выходе регулятора нагрузки 16 появится сигнал, зависящий от разности между значением тока, поступающего с блока задания нагрузки 17, и фактическим значением тока электродвигателя 2. Этот сигнал поступает на первый вход регуляторов частоты 12 и 13, которые воздействуют на преобразователи частоты 10 и 11. Последние уменьшают частоту переменного тока, подводимого к электродвигателям 1 и 2, что приводит к снижению частоты вращения этих электродвигателей, редукторов 3 и 4, приводных звездочек 5 и 6 и скорости перемещения (скорости резания) тяговой цепи 7 и струговых кареток 8 по направляющей 9.
Одновременно за счет снижения частоты переменного тока на выходе преобразователя частоты 11 уменьшается частота управляющих импульсов на выходе блока управления 38 и пропорционально уменьшается скорость перемещения (скорость подачи) штоков гидроцилиндров 26 и направляющей 9 на забой. В результате пропорционального уменьшения скорости резания и скорости подачи толщина стружки остается практически постоянной, поэтому отношение шага резания к толщине стружки также сохраняется неизменным. Вместе с тем за счет уменьшения скорости резания обеспечивается снижение мощности электродвигателей 1 и 2 и потребляемого ими тока до заданного уровня.
В случае уменьшения фактического тока, потребляемого электродвигателем 2, например из-за снижения крепости угля, регулятор нагрузки 16 с помощью регуляторов частоты 12 и 13 и преобразователей частоты 10 и 11 обеспечивает увеличение частоты вращения электродвигателей 1 и 2 и скорости резания, а также пропорциональное увеличение скорости подачи направляющей 9 на забой. В результате нагрузка электродвигателей повышается и стабилизируется на заданном уровне, а отношение шага резания к толщине стружки поддерживается неизменным.
Из-за неодинаковой крепости угля в верхней и нижней пачках угольного пласта сопротивление движению нижней и верхней ветвей тяговой цепи 7 со струговыми каретками 8 может быть различной, при этом нагрузка (ток) электродвигателя 1 будет отличаться от нагрузки (тока) электродвигателя 2 в большую или меньшую стороны. Если, например, ток электродвигателя 2 окажется больше тока электродвигателя 1, измеряемого датчиком нагрузки 14, то на выходе сумматора 19 блока выравнивания нагрузок 18 появляется положительный сигнал со знаком "+", который приводит к срабатыванию компаратора 20 и ключа 22. Сигнал рассогласования тока, равный разности токов электродвигателей 2 и 1, с выхода блока выделения модуля сигнала 24 поступает на регулятор выравнивания нагрузок 25. Сигнал с выхода регулятора выравнивания нагрузок 25 через открытый ключ 22 поступает на третий вход регулятора частоты 12 со знаком "+", что приводит к увеличению частоты питания электродвигателя 1 до тех пор, пока токи электродвигателей 1 и 2 сравняются.
При превышении тока электродвигателя 1 тока электродвигателя 2 на выходе сумматора 19 появляется отрицательный сигнал со знаком "-", который приводит к срабатыванию компаратора 21 и ключа 23. Сигнал с выхода регулятора выравнивания нагрузок 25 через открытый ключ 23 поступает на второй вход регулятора частоты 12 со знаком "-", что приводит к снижению частоты питания электродвигателя 1 и уменьшению тока, потребляемого им, до значения тока электродвигателя 2.
Если необходимо одномоментно выключить подачу направляющей 9 на забой, то с блока 39 сигнала о начальной установке подается сигнал, под действием которого с выхода блока управления 38 поступает управляющий сигнал на включение электромагнитов 33 и 35 каждого электрогидравлического блока 30. Гидрораспределители 31 и 32 переключаются в правую позицию, слив рабочей жидкости из штоковых полостей гидроцилиндров 26 в сливную гидромагистраль 29 прекращается и их поршни останавливаются.
Для включения подачи направляющей 9 исполнительного органа на забой прекращают поступление сигнала с блока 39 и блок управления 38 начинает вырабатывать управляющие импульсы для включения электромагнитов 33, 34, 35 и 36 в указанной выше последовательности.
При длительных перерывах в работе гидрораспределители 27 устанавливаются в нейтральную позицию С. При включении гидрораспределителей 27 в позиции Д и В происходит включение и реверсирование гидроцилиндров 26. Например, для периодического устранения накапливающихся в процессе эксплуатации фронтального агрегата ошибок в прямолинейности направляющей 9 в плоскости пласта.
Таким образом, предлагаемое введение дополнительных блоков в сочетании с изменением и введением дополнительных связей между блоками устройства управления приводом исполнительного органа фронтального агрегата позволяет регулировать в автоматическом режиме как скорость подачи исполнительного органа на забой, так и скорость его перемещения по направляющей (скорость резания) и обеспечить поддержание постоянства отношения шага резания к толщине стружки и минимума удельных затрат энергии на отделение угля от массива при изменении режима работы исполнительного органа. Кроме того, благодаря наличию в каждом электрогидравлическом блоке объемного дозатора обеспечивается синхронизация скоростей подачи направляющей на забой каждым гидроцилиндром перемещения направляющей и автоматическое поддержание ее прямолинейности в плоскости пласта. В результате уменьшается сопротивление движению исполнительного органа по направляющей и снижаются удельные затраты электроэнергии. Одновременно стабилизируется нагрузка электродвигателя привода исполнительного органа на заданном уровне. В результате совместного влияния указанных факторов повышается производительность фронтального агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2005 |
|
RU2282719C1 |
| НАСОСНАЯ СТАНЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165528C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АГРЕГАТОМ ПО ГИПСОМЕТРИИ ПЛАСТА | 1991 |
|
RU2012799C1 |
| ГИДРОПРИВОД ПЕРЕКРЫТИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2000 |
|
RU2165529C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОВИДНЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ ГОРНОГО КОМБАЙНА | 2007 |
|
RU2349752C1 |
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| СТРУГОВАЯ КАРЕТКА ФРОНТАЛЬНОГО АГРЕГАТА | 2001 |
|
RU2203416C1 |
Изобретение относится к горной промышленности и может быть использовано в системе автоматического регулирования и управления электроприводом исполнительного органа фронтального агрегата. Задачей изобретения является повышение производительности фронтального агрегата. Устройство включает два асинхронных электродвигателя, связанных через редукторы с приводными звездочками бесконечной тяговой цепи, оснащенной струговыми каретками с возможностью их перемещения по направляющей, и содержит два преобразователя частоты, два регулятора частоты, блок выравнивания нагрузок, включающий сумматор, два компаратора, первый и второй ключи, блок выделения модуля сигнала и регулятор выравнивания нагрузок. Устройство снабжено регулятором нагрузки, блоком задания нагрузки, блоком управления, блоком сигнала начальной установки, гидроцилиндрами перемещения направляющей на забой, гидрораспределителями управления гидроцилиндрами перемещения, электрогидравлическими блоками, включающими объемный дозатор, два двухпозиционных гидрораспределителя с четырьмя электромагнитами управления. 1 ил.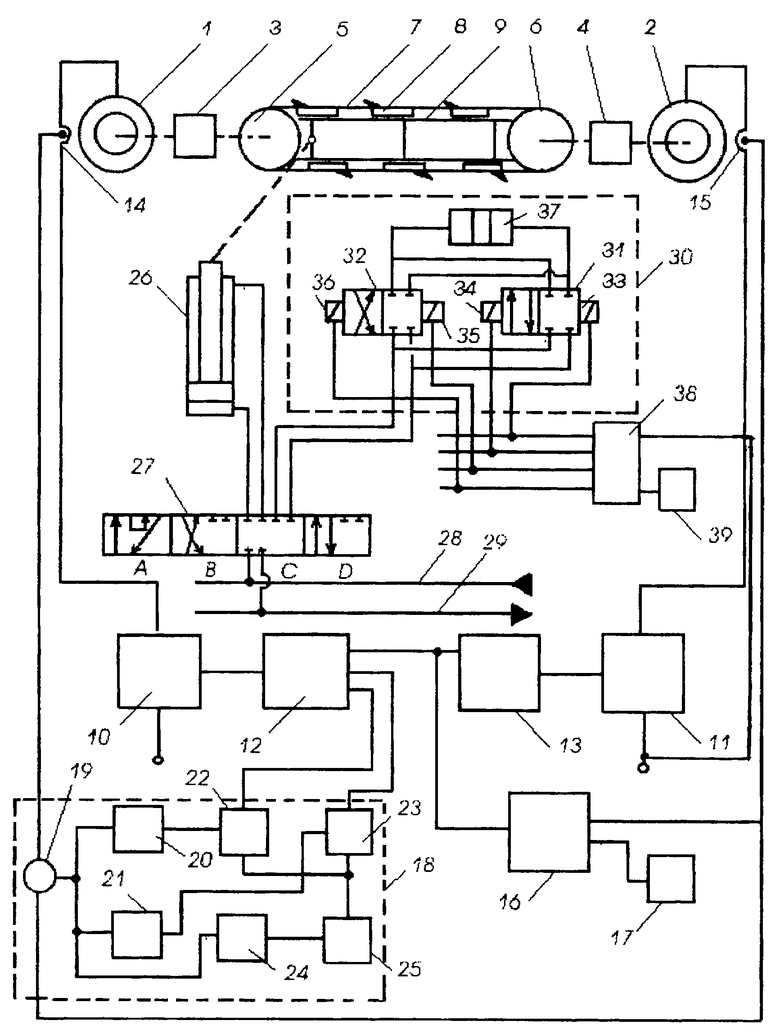
Устройство управления приводом исполнительного органа фронтального агрегата, включающим два асинхронных электродвигателя, связанные через редукторы с приводными звездочками бесконечной тяговой цепи, оснащенной струговыми каретками с возможностью их перемещения по направляющей, содержащее первый и второй преобразователи частоты, входы которых соединены с электрической силовой сетью, а выходы связаны с обмоткой статора, соответственно, первого и второго электродвигателей, первый и второй регуляторы частоты, выходы которых соединены с управляющими входами, соответственно, первого и второго преобразователей частоты, блок выравнивания нагрузок, включающий сумматор, первый и второй компараторы, первый и второй ключи, блок выделения модуля сигнала, регулятор выравнивания нагрузок, причем сумматор подключен к выходам датчиков нагрузки, выход сумматора соединен со входами первого и второго компараторов и блока выделения модуля сигнала, выходы компараторов связаны, соответственно, с первым и вторым ключами, выходы которых соединены, соответственно, с третьим и вторым входами первого регулятора частоты, выход блока выделения модуля сигнала соединен со входом регулятора выравнивания нагрузок, выход которого соединен со входами первого и второго ключей, отличающееся тем, что оно снабжено регулятором нагрузки, блоком задания нагрузки, блоком управления, блоком сигнала начальной установки, гидроцилиндрами перемещения направляющей на забой, гидрораспределителями управления гидроцилиндрами перемещения, электрогидравлическими блоками, включающими объемный дозатор, первый и второй двухпозиционные гидрораспределители, соответственно, с первым и вторым, третьим и четвертым электромагнитами управления, причем блок задания нагрузки соединен со входом регулятора нагрузки, второй вход которого соединен с датчиком нагрузки второго электродвигателя, выход регулятора нагрузки соединен с первыми входами первого и второго регуляторов частоты, входы каждого гидрораспределителя управления гидроцилиндром перемещения направляющей соединены с напорной и сливной гидромагистралями, первый и второй выход гидрораспределителя управления соединены с поршневой и штоковыми полостями гидроцилиндра перемещения, третий и четвертый его выходы соединены с первым и вторым входами первого и второго двухпозиционных гидрораспределителей, а их первый и второй выходы соединены с противоположными полостями объемного дозатора каждого электрогидравлического блока, первый вход блока управления связан с выходом второго преобразователя частоты, второй его вход соединен с блоком сигнала начальной установки, а первый, второй, третий и четвертый выходы блока управления соединены соответственно с первым, вторым, третьим и четвертым электромагнитами управления двухпозиционными гидрораспределителями электрогидравлических блоков.
| БАБОКИН Г.И | |||
| и др | |||
| Частотно-регулируемый электропривод горных машин и установок | |||
| - М.: Изд | |||
| Центр РХТУ, 1998, с.144-146 | |||
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Устройство автоматического управления скоростью подачи угледобывающего комбайна | 1986 |
|
SU1518511A1 |
| Устройство управления горной машиной | 1987 |
|
SU1476125A1 |
| Способ управления вынесенной системой подачи очистного комбайна | 1987 |
|
SU1461919A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЗАБОЙНЫХ МАШИН | 1997 |
|
RU2123595C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| Устройство автоматического управления горной машиной | 1986 |
|
SU1423737A1 |
| DE 3502664 A1, 31.07.1986 | |||
| СЕРОВ В.И | |||
| и др | |||
| Система управления частотно-регулируемым электроприводом подачи комбайна | |||
| Известия ВУЗов | |||
| Горный журнал | |||
| Пуговица для прикрепления ее к материи без пришивки | 1921 |
|
SU1992A1 |

