Изобретение относится к радиопеленгации, а именно к способам, обеспечивающим определение пространственного местоположения объекта, например летательного аппарата (ЛА).
Изобретение может быть применено для определения пространственного положения объекта и определения азимутального и угломестного направлений на используемые соответствующие маяки с целью увеличения точности определения местоположения в пространстве, например ЛА, и выдерживания заданной траектории полета, в том числе посадки и тем самым повышения безопасности воздушного движения, упрощения и уменьшения весогабаритных характеристик соответствующего бортового оборудования объекта, всепогодности системы, возможности использования одного маяка для ориентации по азимуту (положению объекта по отношению к маяку, в том числе к заданной линии курса) и углу места (положению объекта по отношению к установленной глиссаде снижения), усовершенствования радиотехнической системы радиопеленгации - комплекса маячного и бортового оборудования, позволяющего определять текущие угловые координаты местоположения объекта (в виде азимута и угла места относительно маяка), выполнять движение по заданной траектории с точностями и до высот, соответствующих, например, посадочному минимуму, установленному для данного объекта.
Определение местоположения объекта с большой точностью особенно важно при его посадке, т.к. это напрямую связано с обеспечением безопасности. Актуальность решения такой задачи очевидна: например, 53% всех авиационных происшествий происходит при выполнении заходов на посадку в сложных метеоусловиях, в основном при ухудшении видимости [1. В.И.Жулев, В.С.Иванов "Безопасность полетов летательных аппаратов". - М.: Транспорт, 1986, с.24, 150].
Известны способы пеленгации, использующие высокоточные лазерные устройства со слаборасходящимися пучками излучения малого диаметра, реализованные под названием системы "Глиссада" [2. Кабанов М.В., Панченко М.В. Рассеяние оптических волн дисперсными частицами. 4.111, Изд. Томского филиала СО АН, 1984, §3.3]. В этом способе комбинация лазерных лучей воспринимается в виде наглядного символа, определяющего положение ЛА относительно посадочной траектории и точки приземления. Это достигается с помощью группы лазерных маяков: курсового, расположенного у торца взлетно-посадочной полосы (ВПП) на оси; двух глиссадных маяков, расположенных с обеих сторон ВПП; двух маяков на противоположной стороне ВПП для обозначения кромки ВПП. Лазерные пучки образуют в пространстве фигуру из трех световых полос, направленных под углом снижения навстречу ЛА. При отклонениях ЛА от курса и глиссады расположение полос в пространстве изменяется. Недостатком этого способа и реализующей ее системы является существенная зависимость ее дальности действия от погодных условий.
В настоящее время применяют в основном три способа и соответственно три типа систем для определения пространственного положения объекта: упрощенный, радиомаячный и радиолокационный [3. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973, с.244-247; 4. Бородин В.Т., Рыльский Г.И. Управление полетом самолетов и вертолетов. - М.: Машиностроение, 1972, с.96-103, 108-115, 187-190; 5. Духон Ю.И., Ильинский Н.Н. Средства управления летательными аппаратами. -М.: Воениздат, 1972, с.306-311, 314-318; 6. Сафронов Н.А. Радиооборудование самолетов. - М.: Машиностроение, 1993, с.305-311, 339-345].
Наземное оборудование упрощенного способа и соответствующей системы включает радиопеленгатор, две приводные аэродромные радиостанции, два или три маркерных радиомаяка (РМ), связные командно-стартовые радиостанции и светотехническое оборудование. В составе бортового оборудования используется связная радиостанция, автоматический радиокомпас, радиовысотомер, радиоприемник сигналов маркерных радиомаяков и пилотажно-навигационные приборы (компас, авиагоризонт, часы и т.д.). Работой системы управляют с командно-диспетчерского или командно-стартового пункта.
В состав радиомаячной системы, реализующей соответствующий способ, входит вышеуказанное оборудование упрощенной системы и дополнительное диспетчерское и радиомаячное оборудование. Последнее содержит курсовой и глиссадный РМ, устанавливаемые на земле, и соответствующие бортовые радиоприемники. Курсовой РМ создает равносигнальную плоскость, совпадающую с вертикальной плоскостью посадочного курса. Его устанавливают в 300...1000 м позади ВПП на ее оси. Глиссадный РМ предназначен для указания экипажу плоскости планирования. Его устанавливают обычно левее ВПП на расстоянии 100...150 м от ее оси или непосредственно на оси ВПП, если РМ имеет невыступающую антенну. Выходные сигналы курсового и глиссадного РМ, пропорциональные угловым отклонениям центра тяжести ЛА от линии планирования, могут быть использованы в качестве сигналов рассогласования при автоматизации изменения пространственного положения объекта.
В состав радиолокационной системы, реализующей соответствующий способ, входит вышеуказанное оборудование упрощенной системы, диспетчерское оборудование (такое же, как в радиомаячной системе) и посадочный радиолокатор. При выполнении, например, посадки положение ЛА относительно линии планирования и ВПП измеряется посадочным радиолокатором, операторы которого определяют требуемый маневр ЛА и передают команды управления экипажу по радиотелефонному каналу. При определенных условиях для выполнения посадки могут быть использованы активные или пассивные бортовые радиолокационные станции, обеспечивающие возможность наблюдения на экране индикатора изображения ВПП.
Однако необходимо дальнейшее повышение точности определения азимутального и угломестного направлений на соответствующий маяк, в пределе - до соответствующей точности лазерных систем.
Известен способ пеленгации и пеленгатор радиосигналов источников радиоизлучения при размещении антенного устройства на поверхности подвижного объекта, содержащий направленную антенну, поворотное устройство, обеспечивающее изменение положения максимума диаграммы направленности антенны в заданном секторе углов, приемник, соединенный с антенной, и регистратор уровня сигнала в приемнике [7. Г.П.Астафьев, В.С.Шебашевич, Ю.А.Юрков. Радионавигационные устройства и системы. - М.: Сов. Радио, 1958]. Пеленг определяется по направлению в пространстве, соответствующему максимальному уровню сигнала.
Недостатком этого способа и пеленгатора, а также многоканального пеленгатора по [8. Патент RU 2096797 С1, кл. G 01 s 3/14, 1996] является то, что они не позволяют подавлять сигналы, попадающие на антенну после отражения от поверхности объекта. В достаточно сложном решении по изобретению [9. Патент RU 2218580 С2, кл. G 01 s 3/14, 2001] ставится цель снижения, но не полного устранения количества ложных пеленгов, появляющихся в результате приема электромагнитных волн, отраженных от поверхности объекта. В заявляемом способе эта проблема решена простыми средствами.
По критерию минимальной достаточности за прототип принимается способ определения пространственного положения объекта с использованием бортового оборудования для измерения азимутального и угломестного направлений и дальности, в том числе подвижного, например летательного аппарата, с заданными в правой системе координат его продольной осью ОХ, нормальной осью OY и поперечной осью OZ с направлениями, соответственно, вперед, вверх и вправо относительно соответствующих маяков с использованием электромагнитных каналов их связи с бортовым оборудованием объекта, при котором формируют и передают электромагнитные сигналы с использованием передающей системы маяка и принимают их бортовой приемной системой, при необходимости по сигналам от упомянутых маяков и соответствующих бортовых датчиков вычисляют и отображают на индикаторах расстояние от этих маяков до объекта, азимутальное и угломестное направления на соответствующий маяк, данные о скорости и траектории движения объекта и его отклонении от заданной траектории, вырабатывают электрические сигналы управления органами обеспечения изменения пространственного положения объекта, [10. Авиационная радионавигация. Справочник под ред. А.А.Сосновского. М.: Транспорт, 1990, стр.151].
Способ определения пространственного положения объекта (пеленгации) и радиопеленгационная система по прототипу, хотя и достаточно совершенны на сегодня, не являются оптимальными, т.к. точность ориентации ниже, чем в соответствующей лазерной. Способ обладает все еще недостаточными возможностями, например для обеспечения безопасности полетов (БП) реализующая его система достаточно сложная, использует несколько РМ, что усложняет ее эксплуатацию.
Сущность изобретения направлена на увеличение точности определения пространственного положения объекта за счет повышения точности определения азимутального и угломестного направлений на соответствующий маяк, тем самым повышение БП, упрощение реализующей способ системы, повышение ее технико-экономической эффективности, в том числе из-за экономии частотного ресурса и количества необходимых РМ.
Отличительная особенность заявленного изобретения от прототипа заключается преимущественно в том, что электромагнитное излучение принимают антенным устройством, состоящим из двух соединенных с приемными устройствами магнитных антенн преимущественно со стержневыми сердечниками, причем антенны выполнены и ориентированы относительно продольной оси объекта таким образом, что при отклонении направления движения объекта от направления на соответствующий маяк происходит большое относительное изменение мощности сигналов маяка, регистрируемой бортовой приемной системой от каждой из антенн. Объект ориентируют на соответствующий маяк, добиваясь минимального рассогласования между уровнями сигналов, принятых обеими антеннами. Это позволяет повысить точность определения положения объекта относительно линий курса и глиссады и точность определения азимутального и угломестного направлений на соответствующий маяк по сравнению с прототипом.
Предложен способ определения пространственного положения объекта с использованием бортового оборудования для измерения азимутального и угломестного направлений и дальности, в том числе подвижного, например летательного аппарата, с заданными в правой системе координат его продольной осью ОХ, нормальной осью OY и поперечной осью OZ с направлениями соответственно вперед, вверх и вправо относительно соответствующих маяков с использованием электромагнитных каналов их связи с бортовым оборудованием объекта, содержащий следующие существенные признаки прототипа:
формируют и передают электромагнитные сигналы с использованием передающей системы маяка и принимают их бортовой приемной системой, при необходимости по сигналам от упомянутых маяков и соответствующих бортовых датчиков вычисляют и отображают на индикаторах расстояние от этих маяков до объекта, азимутальное и угломестное направления на соответствующий маяк, данные о скорости и траектории движения объекта и его отклонении от заданной траектории, вырабатывают электрические сигналы управления органами обеспечения изменения пространственного положения объекта.
Другими существенными, отличительными от прототипа признаками являются следующие:
для определения азимутального направления на соответствующий маяк передающей системой маяка передают, а бортовой приемной системой соответственно принимают электромагнитное излучение радиочастотного диапазона, при этом электромагнитное излучение принимают антенным устройством, состоящим из двух соединенных с приемными устройствами магнитных антенн преимущественно со стержневыми сердечниками, в котором оси антенн, совпадающие с осями их сердечников, расположены симметрично относительно оси симметрии АА, параллельной продольной оси объекта ОХ, в плоскости, параллельной плоскости XOZ, связанной с объектом, причем оси антенн образуют с осью симметрии АА углы α=±Δα, где Δα больше нуля градусов и преимущественно не превышает 0,5 градуса, и при α>0 оси антенн расходятся в направлении, совпадающем с направлением продольной оси объекта ОХ, а при α<0 они сходятся в указанном направлении, электрические сигналы принятого антеннами электромагнитного излучения передают в приемные устройства, в них из принимаемого антеннами совокупного излучения селектируют электромагнитное излучение от соответствующего маяка, например, по его модуляции, измеряют уровни сигналов принятого антеннами излучения и их рассогласование и корректируют траекторию движения объекта в горизонтальной плоскости, уменьшая величину рассогласования вплоть до минимально возможного значения, близкого к нулевому, поворачивая объект при α>0 в сторону антенны с меньшим уровнем сигнала, а при α<0 в сторону антенны с большим уровнем сигнала, и по положению объекта в момент достижения упомянутого минимального рассогласования судят об азимутальном направлении на соответствующий маяк, определяя азимутальное направление с использованием бортового оборудования для его измерения, а для определения угломестного направления на соответствующий маяк передающей системой маяка передают, а бортовой приемной системой соответственно принимают электромагнитное излучение, при этом электромагнитное излучение принимают антенным устройством, аналогичным антенному устройству для определения азимутального направления, в котором оси антенн расположены симметрично относительно оси симметрии ВВ, параллельной продольной оси объекта ОХ, в плоскости, параллельной плоскости XOY, связанной с объектом, причем оси антенн образуют с осью симметрии ВВ углы β=±Δβ, где Δβ больше нуля градусов и преимущественно не превышает 0,5 градуса, и при β>0 оси антенн расходятся в направлении, совпадающем с направлением продольной оси объекта ОХ, а при β<0 они сходятся в указанном направлении, электрические сигналы принятого антеннами электромагнитного излучения передают в приемные устройства, в них из принимаемого антеннами совокупного излучения селектируют электромагнитное излучение от соответствующего маяка, например, по его модуляции, измеряют уровни сигналов принятого антеннами излучения и их рассогласование и корректируют траекторию движения объекта в вертикальной плоскости, уменьшая величину рассогласования вплоть до минимально возможного значения, близкого к нулевому, поворачивая объект при β>0 в сторону антенны с меньшим уровнем сигнала, а при β<0 в сторону антенны с большим уровнем сигнала, и по положению объекта в момент достижения упомянутого минимального рассогласования судят об угломестном направлении на соответствующий маяк, определяя угломестное направление с использованием бортового оборудования для его измерения, при этом при необходимости захода объекта на соответствующий маяк по заданному азимутальному и/или угломестному направлению сравнивают его азимутальное и/или угломестное направление на соответствующий маяк с заданным, измеряют их рассогласование, корректируют траекторию движения объекта, уменьшая величину рассогласования вплоть до минимально возможного значения, и одновременно удерживают направление объекта на соответствующий маяк.
Кроме того, антенные устройства экранируют от электромагнитного излучения, приходящего из задней полусферы пространства, и электромагнитного излучения соответствующего маяка, отраженного от поверхности объекта.
Предлагаемый способ благодаря отличительным от прототипа признакам обеспечивает увеличение точности определения пространственного положения объекта, азимутального и угломестного направлений и захода на соответствующий маяк и тем самым повышение БП и его технико-экономической эффективности.
Ниже изобретение описано более детально со ссылками на фигуры, схематично иллюстрирующие реализацию заявленного способа.
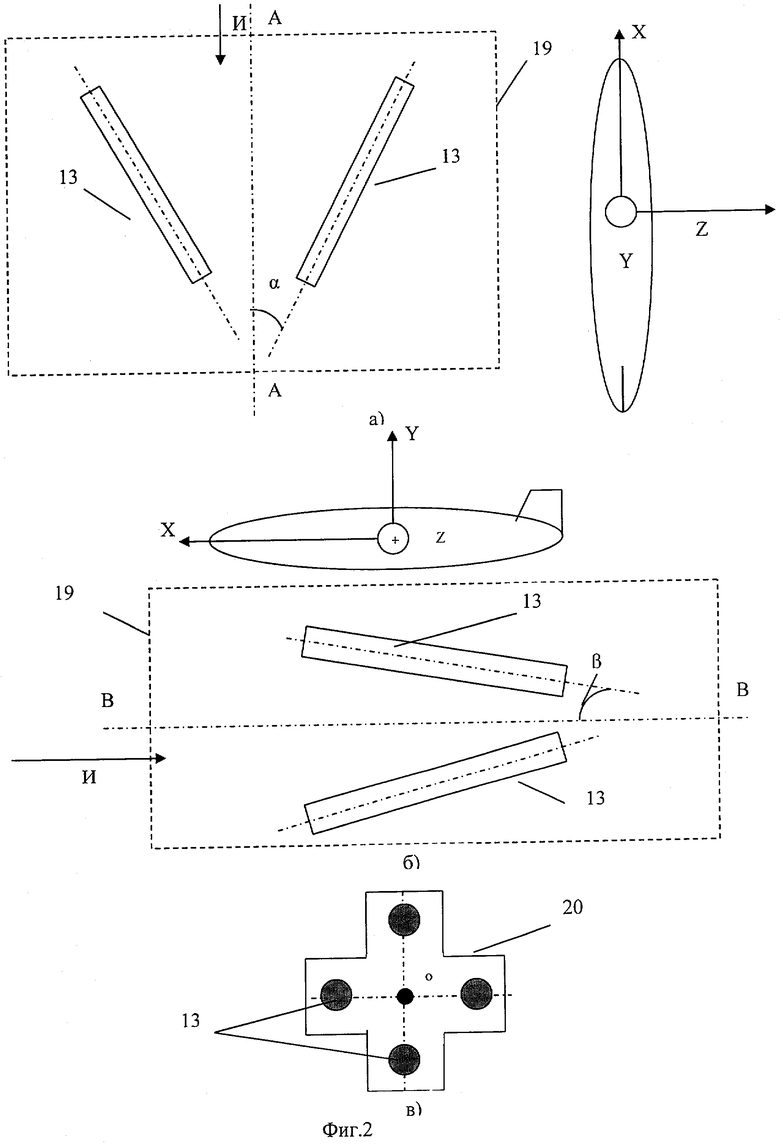
На фиг.1 показана заявляемая система, реализующая заявляемый способ, на фиг.2 - схемы расположения азимутального (а) и угломестного (б) антенных устройств, на фиг.2в - схема расположения этих антенных устройств с совмещенными их осями симметрии.
Как и в прототипе, реализующая способ система (фиг.1) содержит функционально связанные передающую систему маяка 1, снабженную средством 2 формирования электромагнитных сигналов, и бортовую приемную систему электромагнитных сигналов 3, бортовой блок 4, включающий, в том числе, функционально связанные определитель дальности положения объекта 5, определитель азимута 6 и определитель угла места 7, соответственно соединенные с бортовыми датчиками 8, формирующими в том числе данные о скорости и траектории движения объекта, и, при необходимости, блок 9 передачи азимутальной, угломестной и дальномерной информации и информации об отклонении от заданной траектории для визуального отображения на индикаторе 10 и выработки электрических сигналов в другое оборудование, например в блок 11 выработки сигналов управления органами 12 обеспечения изменения пространственного положения объекта.
Система, реализующая заявляемый способ, содержит все упомянутые составляющие прототипа 1...12 и их функциональные связи, но дополнительно бортовая приемная система 3 содержит антенное устройство 19 (фиг.2а), выполненное из двух магнитных антенн 13 (фиг.1), соединенных радиокабелями 14 с приемным устройством 15. Приемное устройство 15 включает, в том числе, блок 16 селекции принимаемого от маяка электромагнитного излучения, например, по его модуляции, и блок 17 определения уровня сигнала, принятого антенной излучения.
Оси антенн, совпадающие с осями их сердечников, расположены симметрично относительно оси симметрии АА, параллельной продольной оси объекта ОХ, в плоскости, параллельной плоскости XOZ, связанной с объектом (фиг.2а), причем оси антенн образуют с осью симметрии АА углы α=±Δα, где Δα больше нуля градусов и преимущественно не превышает 0,5 градуса, и при α>0 оси антенн расходятся в направлении, совпадающем с направлением продольной оси объекта ОХ, а при α<0 они сходятся в указанном направлении.
Блок 17 первой антенны и аналогичный блок второй антенны через блок 18 измерения рассогласования уровней сигналов принятого антеннами излучения соединены функционально с определителем 6 азимута положения объекта, входящим в блок 4.
Для определения угломестного направления на соответствующий маяк антенное устройство 19 (фиг.2б) выполнено аналогично упомянутому антенному устройству для определения азимутального направления.
Оси антенн 13 этого антенного устройства расположены симметрично относительно оси симметрии ВВ, параллельной продольной оси объекта ОХ, в плоскости, параллельной плоскости XOY, связанной с объектом, причем оси антенн образуют с осью симметрии ВВ углы β=±Δβ, где Δβ больше нуля градусов и преимущественно не превышает 0,5 градуса, и при β>0 оси антенн расходятся в направлении, совпадающем с направлением продольной оси объекта ОХ, а при β<0 они сходятся в указанном направлении.
Указанные значения углов соответствуют известному резко выраженному минимуму направленности излучения магнитной антенны и требованиям к точности определения направления на соответствующий маяк.
При этом блок 17 определения уровня сигнала, принятого антенной излучения первой антенны, и аналогичный блок второй антенны через блок 18 измерения рассогласования уровней сигналов, принятого антеннами излучения, соединен функционально с определителем 7 угла места положения объекта, входящим в блок 4. Движущийся объект, например летательный аппарат, имеет заданные в правой системе координат продольную ось ОХ, нормальную ось OY и поперечную ось OZ с направлениями соответственно вперед, вверх и вправо (фиг.2). На фигуре 2 оси, направленные на нас, обозначены О, от нас - ⊕.
Магнитные антенны 13 (фиг.2а и 2б) выполнены преимущественно со стержневыми сердечниками. Падающее на антенны излучение показано стрелкой И.
Для определения азимутального направления на соответствующий маяк антенное устройство 19 выполнено с возможностью его крепления на объекте (фиг.2а) таким образом, чтобы оси антенн 13 находились в плоскости, параллельной плоскости XOZ, связанной с объектом.
Для определения угломестного направления на соответствующий маяк антенное устройство 19 выполнено с возможностью его крепления на объекте (фиг.2б) таким образом, чтобы оси антенн 13 находились в плоскости, параллельной плоскости XOY, связанной с объектом.
Для определенности изложения объект далее называем ЛА, маяк - посадочным радиомаяком (ПРМ) используется электромагнитное излучение радиочастотного диапазона.
Сущность способа заключается в следующем.
Электромагнитный сигнал ПРМ формируют средством 2 наземной передающей системы 1 соответствующего маяка (фиг.1). Его принимают каждой магнитной антенной 13 бортовой приемной системы 3 и далее по радиокабелям 14 электрические сигналы поступают в приемные устройства 15. В них в блоках 16 из принимаемых антеннами совокупных излучений селектируют излучение ПРМ, например, по его модуляции. В приемных устройствах 15 в блоках 17 измеряют уровни принятого излучения ПРМ. В блоке 18 производят сравнение сигналов, принятых каждой антенной. При наличии рассогласования уровней этих сигналов корректируют траекторию движения объекта в соответствующих плоскостях, уменьшая величину рассогласования вплоть до минимально возможного значения, близкого к нулевому. Этого достигают, поворачивая объект в горизонтальной плоскости при α>0 в сторону антенны с меньшим уровнем сигнала, а при α<0 - в сторону антенны с большим уровнем сигнала и соответственно поворачивая объект при β>0 в сторону антенны с меньшим уровнем сигнала, а при β<0 - в сторону антенны с большим уровнем сигнала. По положению объекта при достижении этого условия судят о направлении на соответствующий маяк, определяя при этом азимутальное и угломестное направления с использованием бортового оборудования для их измерения. Далее информацию направляют в определитель азимута 6 или соответственно определитель угла места 7 бортового блока 4. В определителе дальности 5 положения ЛА используется любой из известных методов измерения дальности.
Выделенная из блока 4 информация о местоположении ЛА по азимуту (курсу) и углу места (глиссаде) поступает, при необходимости, в блок 9 передачи азимутальной, угломестной и дальномерной информации и информации об отклонении от заданной траектории для визуального отображения информации на индикаторе 10 и для выработки электрических сигналов в другое оборудование, например в блок 11 выработки сигналов управления органами 12 обеспечения изменения пространственного положения (траектории) ЛА.
При необходимости захода объекта на соответствующий маяк по заданному азимутальному и/или угломестному направлению сравнивают его азимутальное и/или угломестное направление на соответствующий маяк с заданным и измеряют их рассогласование. Затем корректируют траекторию движения объекта, уменьшая величину рассогласования вплоть до минимально возможного значения, и одновременно удерживают направление объекта на соответствующий маяк.
Магнитная антенна имеет резко выраженную направленную характеристику. Полярная диаграмма ее чувствительности имеет форму восьмерки. Уровень принимаемого магнитной антенной сигнала не имеет резко выраженного максимума, но его минимум весьма отчетлив (практически близок к нулевому значению) и позволяет определить его с достаточно большой точностью. Направление на пеленгуемый соответствующий маяк определяют, как указывалось, по минимуму рассогласования уровней принимаемых антеннами сигналов. В этом случае направление на соответствующий маяк совпадает с направлением оси симметрии АА (или соответственно ВВ) антенного устройства. Точность определения направления (отсчета по азимуту и/или углу места) составляет на практике около 0,5 градуса (±0,25 градуса). С сокращением расстояния от объекта до соответствующего маяка точность определения местоположения пропорционально растет. Таким образом, если направление падающего излучения совпадает с продольной осью ОХ ЛА, то рассогласование между уровнями сигналов от каждой из антенн будет минимальным. При отклонении направления излучения от оси ОХ рассогласование между уровнями сигналов существенно увеличивается. Производя изменение траектории движения ЛА до получения минимального рассогласования сигналов от антенн 13, пилот (или автоматика), тем самым, ориентирует ЛА на ПРМ. При этом в блоке 4 определяется рассогласование между азимутальным и/или угломестным направлением на соответствующий маяк и заданным азимутальным и/или угломестным направлением. Пилот (или автоматика), производя необходимое управление, корректирует траекторию движения ЛА, уменьшая величину рассогласования до минимально возможного значения (вплоть до нулевого), при котором согласно требованиям для ПРМ 1-й категории отклонение от оси на начало взлетно-посадочной полосы не превысит ±10,5 м, а для ПРМ 2-й категории - не превысит ±7,5 м. Вследствие указанной резко выраженной чувствительности величины сигнала к отклонению сердечника антенны от направления на соответствующий маяк посадка ЛА будет производиться практически без рыскания.
Для предотвращения попадания на антенные устройства помехового электромагнитного излучения, приходящего из задней полусферы пространства, и электромагнитного излучения соответствующего маяка, отраженного от поверхности объекта, их экранируют, например, помещая в преимущественно проточный (для набегающего воздушного потока) кожух, выполненный, например, в виде трубы прямоугольного сечения с поглощающей электромагнитное излучение внутренней поверхностью.
Представляет практический интерес реализующая способ система (фиг.2в), в которой оси симметрии АА и ВВ антенных устройств для определения азимутального и угломестного направлений совмещены (на фигуре совмещенные оси обозначены О) и антенные устройства заключены в единый преимущественно проточный кожух 20, выполненный, например, в виде трубы крестообразного сечения с поглощающей электромагнитное излучение внутренней поверхностью, с обеспечением экранирования электромагнитного излучения, приходящего из задней полусферы пространства, и электромагнитного излучения соответствующего маяка, отраженного от поверхности объекта.
Результативность и эффективность использования предлагаемого способа состоит в следующем.
Изобретение позволяет увеличить точность пеленгации и ориентации в пространстве объекта и выдерживания заданной траектории и, тем самым, например, повысить безопасность посадки ЛА, упростить и уменьшить весогабаритные характеристики соответствующего бортового оборудования объекта, реализующая способ система всепогодна, возможно использование одной частоты электромагнитного излучения маяка для ориентации по азимуту и углу места, а также для его реализации возможно применение одного маяка. Способ прост в реализации, его точность близка к способам лазерной ориентации, в том числе при посадке, но лишена его недостатков, легко вписывается в применение с системами радиопеленгации и навигации, использующими другие способы ориентации.
Таким образом, отличительные признаки заявляемого способа определения пространственного положения объекта обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию "новизна".
Результаты поиска известных решений в области радиопеленгации, радионавигации и связи с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного способа, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285932C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282866C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282868C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282867C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК РАДИОСИГНАЛОВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2267862C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439798C1 |
Изобретение относится преимущественно к радиопеленгации, а именно к способам определения пространственного положения объекта, например летательного аппарата, и азимутального и угломестного направлений на соответствующий маяк. Достигаемый технический результат - увеличение точности определения местоположения объекта в пространстве независимо от погодных условий за счет повышения точности определения азимутального и угломестного направлений на соответствующий маяк, отсутствие ложного пеленга, повышение безопасности движения объекта, например, при его посадке, уменьшение весогабаритных характеристик соответствующего бортового оборудования, повышение технико-экономической эффективности. Передающая система маяка передает, а бортовая приемная система принимает электромагнитное излучение радиочастотного диапазона соединенными с приемными устройствами двумя оппозитно и симметрично расположенными под углом друг к другу магнитными антеннами преимущественно со стержневыми сердечниками для определения азимутального направления и аналогичным устройством для определения угломестного направления. Продольная ось объекта и ось симметрии антенн одинаково ориентированы и параллельны. Принятое излучение селектируют, измеряют его уровень и траекторию движения объекта в пространстве изменяют до получения минимального рассогласования уровней принятых антеннами сигналов и по положению объекта при достижении этого условия судят о направлении на соответствующий маяк с использованием бортового оборудования для их измерения. При необходимости захода объекта на соответствующий маяк по заданному азимутальному и/или угломестному направлению сравнивают его азимутальное и/или угломестное направление на соответствующий маяк с заданным, измеряют их рассогласование, корректируют траекторию движения объекта, уменьшая величину рассогласования вплоть до минимально возможного значения, и одновременно удерживают направление объекта на соответствующий маяк. Также антенны экранируют от помехового электромагнитного излучения, приходящего из задней полусферы пространства, и электромагнитного излучения соответствующего маяка, отраженного от поверхности объекта. 3 з.п. ф-лы, 2 ил.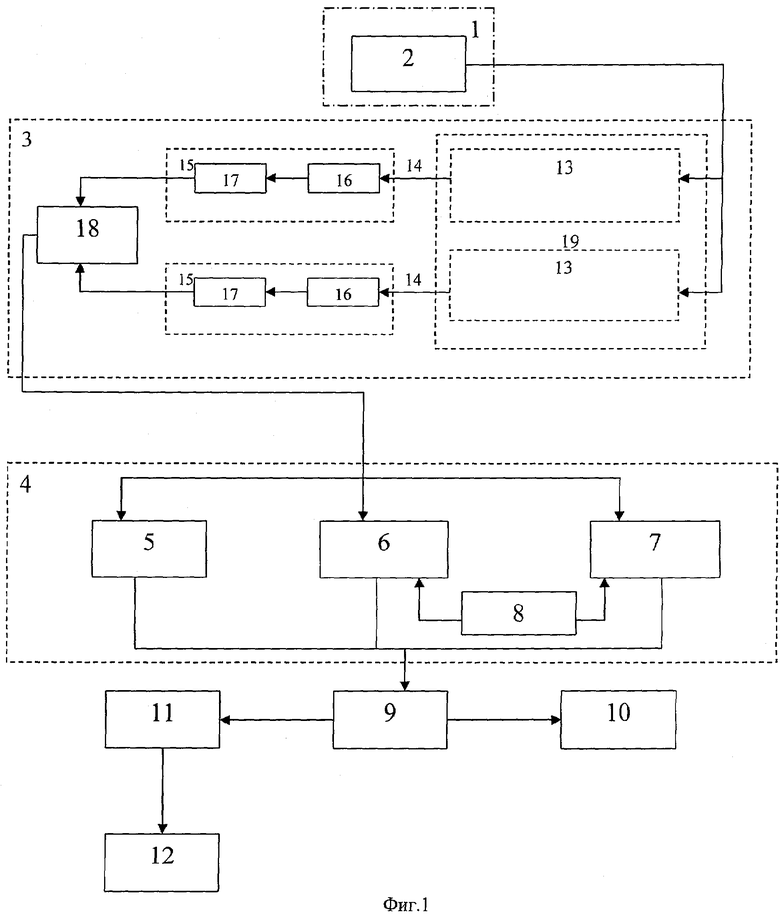
| Авиационная радионавигация | |||
| Справочник./Под ред | |||
| А.А | |||
| Сосновского | |||
| - М.: Транспорт, 1990, с.151 | |||
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1996 |
|
RU2096797C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ РАЗМЕЩЕНИИ АНТЕННОГО УСТРОЙСТВА НА ПОВЕРХНОСТИ ПОДВИЖНОГО НОСИТЕЛЯ (ВАРИАНТЫ), ПЕЛЕНГАТОР РАДИОСИГНАЛОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ РАЗМЕЩЕНИИ АНТЕННОГО УСТРОЙСТВА НА ПОВЕРХНОСТИ ПОДВИЖНОГО НОСИТЕЛЯ (ВАРИАНТЫ) | 2001 |
|
RU2218580C2 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |

