Предлагаемая система относится к области радионавигации, а именно к системам, обеспечивающим определение пространственного местоположения объекта, например, летательного аппарата (ЛА).
Данная система может быть применена для определения пространственного положения ЛА и определения азимутального и угломестного направлений на используемые соответствующие маяки с целью увеличения точности определения местоположения ЛА в пространстве и выдерживания заданной траектории полета, в том числе посадки, и тем самым повышения безопасности воздушного движения, упрощения и уменьшения весогабаритных характеристик соответствующего бортового оборудования ЛА, всепогодности системы, возможности использования одного маяка для ориентации по азимуту (положение ЛА по отношении к маяку, в том числе к заданной линии курса) и углу места (положения ЛА по отношению к установленной глиссаде снижения), простоты реализации, то есть усовершенствования, в частности радиотехнической системы радиопеленгации - комплекса маячного и бортового оборудования, позволяющего определять текущие угловые координаты местоположения ЛА (в виде азимута и угла места относительно маяка), выполнять движение по заданной траектории с точностями и до высот, соответствующих, например, посадочному минимуму, установленному для данного ЛА.
Определение местоположения ЛА с большой точностью особенно важно при его посадке, так как это напрямую связано с обеспечением безопасности. Актуальность решения такой задачи очевидна: например, 53% всех авиационных происшествий происходит при выполнении заходов на посадку в сложных метеоусловиях, в основном при ухудшении видимости (В.И.Жулев, B.C.Иванов. Безопасность полетов летательных аппаратов. - М.: Транспорт, 1986, с.24, 150).
Известны системы пеленгации, использующие высокоточные лазерные устройства со слаборасходящимися пучками излучения малого диаметра, реализованные под названием системы «Глиссада» (Кабанов М.В., Панченко М.В. Рассеяние оптических волн дискретными частицами. Ч.III. Изд. Томского филиала СО АН, 1984, пар.3.3). В этой системе комбинация лазерных лучей воспринимается в виде наглядного символа, определяющего положение ЛА относительно посадочной траектории и точки приземления. Это достигается с помощью группы лазерных маяков: курсового, расположенного у торца взлетно-посадочной полосы (ВПП) на оси; двух глиссадных маяков, расположенных с обеих сторон ВПП; двух маяков на противоположной стороне ВПП для обозначения кромки ВПП. Лазерные пучки образуют в пространстве фигуру из трех световых полос, направленных под углом снижения навстречу ЛА. При отклонениях ЛА от курса и глиссады расположение полос в пространстве изменяется. Недостатком этой системы является существенная зависимость ее дальности действия от погодных условий.
В настоящее время применяют три типа систем определения пространственного положения ЛА: упрощенную, радиомаячную и радиолокационную (Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - С.244-247; Бородин В.Т., Рыльский Г.И. Управление полетом самолетов и вертолетов. - М.: Машиностроение, 1972. - С.96-103, 108-115, 187-190; Духон Ю.И. Ильинский Н.Н. Средства управления летательными аппаратами. - М.: Воениздат, 1972. - С.306-311, 314-318; Сафронов Н.А. Радиооборудование самолетов. - М.: Машиностроение, 1993. - С.305-311, 339-345).
Наземное оборудование упрощенной системы включает радиопеленгатор, две приводные аэродромные радиостанции, два или три маркерных радиомаяка (РМ), связные командно-стартовые радиостанции и светотехническое оборудование. В составе бортового оборудования используется связная радиостанция, автоматический радиокомпас, радиовысотомер, радиоприемник сигналов маркерных радиомаяков и пилотажно-навигационные приборы (компас, авиагоризонт, часы и т.д.). Работой системы управляют с командно-диспетчерского или командно-стартового пункта.
В состав радиомаячной системы входит вышеуказанное оборудование упрощенной системы и дополнительное диспетчерское и радиомаячное оборудование. Последнее содержит курсовой и глиссадный РМ, устанавливаемые на земле, и соответствующие бортовые радиоприемники. Курсовой РМ создает равносигнальную плоскость, совпадающую с вертикальной плоскостью посадочного курса. Его устанавливают в 300 - 1000 м позади ВПП на ее оси. Глиссадный РМ предназначен для указания экипажу ЛА плоскости планирования. Его устанавливают обычно левее ВПП на расстоянии 100-150 м от ее оси или непосредственно на оси ВПП, если РМ имеет невыступающую антенну. Выходные сигналы курсового и глиссадного РМ, пропорциональные угловым отклонениям центра тяжести ЛА от линии планирования, могут быть использованы в качестве сигналов рассогласования при автоматизации изменения пространственного положения ЛА.
В состав радиолокационной системы входит вышеуказанное оборудование упрощенной системы, диспетчерское оборудование (такое же, как в радиомаячной системе) и посадочный радиолокатор. При выполнении, например, посадки положение ЛА относительно линии планирования и ВПП измеряется посадочным радиолокатором, операторы которого определяют требуемый маневр ЛА и передают команды управления экипажу по радиотелефонному каналу. При определенных условиях для выполнения посадки могут быть использованы активные или пассивные бортовые радиолокационные станции, обеспечивающие возможность наблюдения на экране индикатора изображения ВПП.
Однако необходимо дальнейшее повышение точности определения азимутального и угломестного направлений на соответствующий маяк, в пределе до соответствующей точности лазерной системы.
Известны также системы для определения пространственного положения объекта (патенты РФ №№2.096.797, 2.134.892, 2.218.580, 2.229.671, 2.285.933; Авиационная радионавигация. Справочник под ред. Сосновского А.А. - М.: Транспорт, 1990. - С.151; Астафьев Г.П., Шебшаевич B.C., Юрков Ю.А. Радионавигационные устройства и системы. - М.: Сов. Радио, 1988 и другие).
Из известных систем наиболее близкой к предлагаемой является система для определения пространственного положения объектов (патент РФ №2.285.933, G01S 1/08, 2005), которая и выбрана в качестве прототипа.
Указанная система обеспечивает точное определение объекта в пространстве независимо от погодных условий за счет повышения точности определения азимутального и угломестного направлений на соответствующий маяк, отсутствия ложного пеленга.
Траекторию движения объекта в пространстве изменяют до получения минимального уровня принятого сигнала и по положению объекта при достижении этого условия судят о направлении на соответствующий маяк, определяя при этом азимутальное и угломестное направления с использованием бортового оборудования для их измерения.
Однако измерения азимутального и угломестного направлений на соответствующий маяк на борту объекта осуществляют при минимальном уровне принятого сигнала, т.е. при весьма низком отношении сигнал/шум, что снижает помехоустойчивость и точность измерений указанных направлений.
Кроме того, обнаружение и селекцию сигналов соответствующего маяка осуществляют на фоне большого числа мешающих мощных сигналов и помех, приходящих с других направлений.
Существенное уменьшение числа мешающих сигналов и помех может быть достигнуто при пеленгации сигналов соответствующего маяка по максимуму путем сужения диаграммы направленности бортовой антенны. Однако получение узких диаграмм направленности бортовой антенны в диапазонах относительно низких частот затруднительно.
При пеленгации по минимуму бортовой антенной с диаграммой направленности в форме восьмерки существенного уменьшения числа мешающих сигналов и помех достичь нельзя.
Технической задачей изобретения является повышение помехоустойчивости и точности определения азимутального и угломестного направлений на соответствующий маяк путем увеличения отношения сигнал/шум и использования сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что система определения пространственного положения подвижного объекта, например летательного аппарата, с заданными в правой системе координат его продольной осью ОХ, нормальной осью OY и поперечной осью OZ относительно соответствующего маяка, с использованием бортового оборудования, предназначенного для измерения азимутального и угломестного направлений и дальности подвижного объекта, с использованием электромагнитного канала связи между бортовым оборудованием объекта и соответствующим маяком, содержащая в соответствии с ближайшим аналогом функционально связанные передающую систему маяка, снабженную средством формирования электромагнитных сигналов, соединенную с бортовым блоком, включающим функционально связанные определитель дальности положения объекта, определитель азимута и определитель угла места соответственно, соединенные с бортовыми датчиками, формирующими данные о скорости и траектории движения объекта, выделенная из бортового блока информация о местоположении летательного аппарата поступает в блок выработки электромагнитных сигналов азимутальной, угломестной и дальнемерной информации и информации об отклонении от заданной траектории для визуального отображения в индикаторе и передачи их в блок выработки сигналов управления органами обеспечения изменения пространственного положения объекта, при этом бортовая система содержит первый радиокабель, приемное устройство, включающее блок селекции принимаемого электромагнитного сигнала, и первую магнитную антенну с диаграммой направленности в форме восьмерки, преимущественно со стержневым сердечником, с заданными в правой системе координат взаимно перпендикулярными продольной ОХ1, нормальной OY1 и поперечной OZ1 осями симметрии, продольная ось OX1 направлена по оси сердечника первой магнитной антенны, а оси ОХ и OX1, OY и OY1, OZ и OZ1 соответственно одинаково ориентированы и параллельны, первая магнитная антенна заключена в преимущественно проточный кожух, выполненный, например, в виде трубы с поглощающей электромагнитные сигналы внутренней поверхностью, с обеспечением экранирования электромагнитных сигналов, приходящих из задней полусферы пространства, и электромагнитных сигналов соответствующего маяка, отраженного от поверхности объекта, отличается от ближайшего аналога тем, что приемная система снабжена второй магнитной антенной с круговой диаграммой направленности, двумя усилителями высокой частоты, двумя амплитудными детекторами, блоком деления, первым пороговым блоком, первым ключом и вторым радиокабелем, причем средство формирования электромагнитных сигналов выполнено в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, усилителя мощности и передающей антенны, в качестве электромагнитных сигналов использованы сложные сигналы с фазовой манипуляцией, блок селекции выполнен в виде последовательно включенных удвоителя фазы, второго анализатора спектра, блока сравнения, второй вход которого соединен с выходом первого анализатора спектра, второго порогового блока и второго ключа, второй вход которого соединен с выходом второго усилителя высокой частоты, а выход подключен к входам определителя дальности положения объекта, определителя азимута и определителя угла места, к выходу первой магнитной антенны через первый радиокабель последовательно подключены первый усилитель высокой частоты, первый амплитудный детектор, блок деления, первый пороговый блок и первый ключ, второй вход которого соединен с выходом второго усилителя высокой частоты, а выход подключен к входам первого анализатора спектра и удвоителя фазы, к выходу второй магнитной антенны через второй радиокабель последовательно подключены второй усилитель высокой частоты и второй амплитудный детектор, выход которого соединен с вторым входом блока деления.
Структурная схема предлагаемой системы представлена на фиг.1. Схема расположения приемных магнитных антенн показана на фиг.2. Временные диаграммы, поясняющие работу системы, показаны на фиг.3.
Система содержит функционально связанные передающую систему маяка 1, снабженную средством 2 формирования электромагнитных сигналов и бортовую приемную систему 3 электромагнитных сигналов, бортовой блок 4, включающий функционально связанные определитель 5 дальности положения объекта, определитель 6 азимута и определитель 7 угла места, соединенные с бортовыми датчиками 8, формирующими данные о скорости и траектории движения объекта, и блок 9 передачи азимутальной, угломестной и дальномерной информации и информации об отклонении от заданной траектории для визуального отображения на индикаторе 10 и выработки электрических сигналов в другое оборудование, например в блок 11, и выработки сигналов управления органами 12 обеспечения изменения пространственного положения объекта.
Средство 2 формирования электромагнитных сигналов выполнено в виде последовательно включенных задающего генератора 20, фазового манипулятора 22, второй вход которого соединен с выходом генератора 21 псевдослучайной последовательности (ПСП), усилителя 23 мощности и передающей антенны 24.
В качестве электромагнитных сигналов использованы сложные сигналы с фазовой манипуляцией.
Блок 17 селекции выполнен в виде последовательно включенных удвоителя 34 фазы, второго анализатора 35 спектра, блока 36 сравнения, второй вход которого соединен с выходом первого анализатора 33 спектра, второго порогового блока 37 и второго ключа 38, второй вход которого соединен с выходом второго усилителя 27 высокой частоты, а выход подключен к входам определителя 5 дальности положения объекта, определителя 6 азимута и определителя 7 угла места.
К выходу первой магнитной антенны 13 через первый радиокабель 15 последовательно подключены первый усилитель 2 высокой частоты, первый амплитудный детектор 28, блок 30 деления, первый пороговый блок 31 и первый ключ 32, второй вход которого соединен с выходом второго усилителя 27 высокой частоты, а выход подключен к входам первого анализатора 33 спектра и удвоителя фазы 34. К выходу второй магнитной антенны 25 через второй радиокабель 18 последовательно подключены второй усилитель 27 высокой частоты и второй амплитудный детектор 29, выход которого соединен со вторым входом блока 30 деления.
Движущийся объект, например летательный аппарат, имеет заданные в правой системе координат продольную ось ОХ, нормальную ось OY и поперечную ось OZ с направлениями соответственно вперед, вверх и вправо.
Первая магнитная антенна 13 со стержневым сердечником 14 (фиг.2) имеет взаимно перпендикулярные продольную OX1, нормальную OY1 и поперечную OZ1 оси симметрии, образующие правую систему координат. При этом ось OX1 направлена по оси сердечника 14 магнитной антенны, а оси ОХ и OX1, OY и OY1, OZ и OZ1 соответственно одинаково ориентированы и параллельны. Падающее излучение показано стрелкой И. На фиг.2 оси, направленные от нас, обозначены ⊕.
Вторая магнитная антенна 25 имеет круговую диаграмму направленности.
Система работает следующим образом.
Электромагнитный сигнал посадочного радиомаяка формируют средством 2 наземной передающей системы 1, которое состоит из последовательно включенных задающего генератора 20, фазового манипулятора 22, второй вход которого соединен с выходом генератора 21 псевдослучайной последовательности (ПСП), усилителя 23 мощности и передающей антенны 24. При этом задающим генератором формируется высокочастотное колебание (фиг.3,а)
uc(t)=Uccos(ωct+φc), 0≤t≤Tc,
где Uc, ωc, φc, Тc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое поступает на первый вход фазового манипулятора 22, на второй вход которого подается псевдослучайная последовательность с выхода генератора 21 m(t) (фиг.3,б).
На выходе фазового манипулятора 22 формируется сложный фазоманипулируемый (ФМн) сигнал (фиг.3,в)
u1(t)=Uccos[ωct+φk(t)+φc], 0≤t≤Tc,
где φk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с псевдослучайной последовательностью m(t) (фиг.3,б), причем φk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, …, N);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Tc=N·τэ), который после усиления в усилителе 23 мощности излучается в эфир, принимается антеннами 13, 25 и через радиокабели 15 и 18, усилители 26, 27 и амплитудные детекторы 28, 29 поступают на два входа блока 30 деления. Амплитуда сигнала на выходе второго амплитудного детектора 29 не зависит от направления прихода входного сигнала из-за кругового вида диаграммы направленности второй антенны 25 (фиг.2). Первая антенна 13 имеет диаграмму направленности в виде восьмерки, вращение которой осуществляется совместно с объектом. Объект направляют на соответствующий маяк, изменяя траекторию его движения в пространстве до получения минимального уровня принятого сигнала на выходе амплитудного детектора 28. Поэтому на выходе блока 30 деления, осуществляющего деление амплитуды сигнала с выхода амплитудного детектора 29 на амплитуду сигнала с выхода амплитудного детектора 28, в этот момент напряжение будет максимальным.
Следует отметить, что величина отношения не зависит от напряженности поля сигналов в месте приема. Величину порога Uпор1 выставляют так, чтобы пороговый блок 31 срабатывал только от сигналов, приходящих с нулевого направления.
При срабатывании порогового блока 31 в нем формируется постоянное напряжение, которое поступает на управляющий вход ключа 32 и открывает его. В исходном состоянии ключи 32 и 38 всегда закрыты.
В системе использованы две малогабаритные магнитные антенны 13 и 25. При этом магнитная антенна 13 снабжена стержневым, преимущественно ферритовым сердечником 14 и имеет резко выраженную направленную диаграмму в форме восьмерки. Уровень принимаемого магнитной антенной 13 сигнала не имеет резко выраженного максимума, но его минимум весьма отчетлив (практически близок к нулевому значению) и позволяет определить его с достаточно высокой точностью. Направление на пеленгуемый соответствующий маяк определяют по минимуму принимаемого сигнала. В этом случае направление на соответствующий маяк совпадает с направлением ферритового стержневого сердечника 14 магнитной антенны 13. Точность определения направления (отсчета по азимуту и углу места) составляет на практике около 0,5 градусов (±0,25 градуса). С сокращением расстояния от объекта до соответствующего маяка точность определения местоположения пропорционально растет. Присущий магнитной антенне 13 недостаток связан с наличием двух минимумов в диаграмме направленности и отсутствием поэтому указания истинного, единственного направления на маяк в данной системе преодолевается благодаря использованию бортового навигационного оборудования ЛА.
Принимаемый ФМн-сигнал с выхода усилителя 27 высокой частоты через открытый ключ 32 поступает на вход блока 17 селекции, состоящего из первого 33 и второго 35 анализаторов спектра, удвоителя 34 фазы, блока 36 сравнения, порогового блока 37 и ключа 38.
При этом на выходе удвоителя 34 фазы, в качестве которого можно использовать перемножитель, на два входа которого подается один и тот же ФМн-сигнал u1(t) (фиг.3,в), образуется гармоническое напряжение (фиг.3,г)
u2(t)=U2cos(2ωct+2φc), 0≤t≤Tc,
где  .
.
Так как 2φk(t)={0,2π}, то в указанном напряжении манипуляция фазы уже отсутствует.
Ширина спектра Δf2 второй гармоники определяется длительностью Тc сигнала (Δf2=1/Тс), тогда как ширина спектра Δfc ФМн-сигнала определяется длительностью τэ его элементарных посылок (Δfc=1/τэ), т.е. ширина спектра Δf2 второй гармоники сигнала в N раз меньше ширины спектра Δfc входного сигнала (Δfc/Δf2=N).
Следовательно, при удвоении фазы ФМн-сигнала его спектр «сворачивается» в N раз. Это и позволяет с высокой вероятностью обнаружить и отселектировать ФМн-сигнал даже тогда, когда его мощность на входе приемного устройства 16 меньше мощности шумов и помех.
Ширина спектра Δfc входного ФМн-сигнала определяется с помощью анализатора 33 спектра, а ширина Δf2 второй гармоники сигнала определяется с помощью анализатора 35 спектра. Напряжения UI и UII, пропорциональные (Δfc и Δf2) соответственно, с выходов анализаторов 33 и 35 спектра поступают на два входа блока 36 сравнения. Так как UI>>UII, то на выходе блока 36 сравнения формируется постоянное напряжение, которое превышает пороговый уровень Uпop2 в пороговом блоке 37.
Постоянное напряжение в блоке 36 сравнения формируется только при значительном различии по амплитуде напряжений UI и UII (ширины спектров Δfc и Δf2). Пороговый уровень Uпop2 выбирается таким, чтобы его не превышали случайные помехи и шумы.
При превышении порогового уровня Uпop2 в пороговом блоке 37 формируется постоянное напряжение, которое поступает на управляющий вход ключа 38, открывая его.
При этом принимаемый ФМн-сигнал u1(t) (фиг.3,в) с выхода усилителя 27 высокой частоты через открытый ключ 38 поступает на вход бортового блока 4, где с помощью блоков 5, 6 и 7 определяются дальность положения ЛА, азимут и угол места соответственно.
Выделенная из блока 4 информация о местоположении ЛА по дальности положения, азимуту (курсу) и углу места (глиссаде) поступает, при необходимости, в блок 9 передачи дальномерной, азимутальной и угломестной информации и информации об отклонении от заданной траектории для визуального отображения информации на индикаторе 10 и для выработки сигналов управления органами 12 обеспечения изменения пространственного положения (траектории) ЛА.
При необходимости захода объекта на соответствующий маяк по заданному азимутальному и/или угломестному направлению сравнивают его азимутальное и/или угломестное направление на соответствующий маяк с заданным и измеряют их рассогласование. Затем корректируют траекторию движения объекта, уменьшая величину рассогласования вплоть до минимально возможного значения, и одновременно удерживают направление объекта на соответствующий маяк.
Следовательно, если направление падающего излучения совпадает с продленной осью ОХ ЛА, то уровень сигнала в приемном устройстве на выходе антенны 13 будет минимальным. При отклонении направления излучения от оси ОХ сигнал на приемном устройстве на выходе антенны 13 существенно увеличится. Произведя изменение траектории движения ЛА до получения минимального сигнала от антенны 13, пилот (или автоматика), тем самым, ориентирует ЛА на посадочный радиомаяк. При этом в блоке 4 определяется рассогласование между азимутальным и/или угломестным направлением на соответствующий маяк и заданным азимутальным и/или угломестным направлением.
Пилот (и/или автоматика) производит необходимое управление, корректирует траекторию движения ЛА, уменьшая величину рассогласования до минимально возможного значения (вплоть до нулевого), при котором согласно требованиям для посадочного радиомаяка 1-й категории отклонение от оси на начало взлетно-посадочной полосы не превышает ±10,5 м, а для посадочного радиомаяка 2-й категории - не превышает ±7,5 м. Вследствие указанной резко выраженной чувствительности величины сигнала к отклонению сердечника первой антенны 13 от направления на соответствующий маяк посадка ЛА будет производиться практически без рыскания.
Для предотвращения попадания на магнитную антенну 13 со стержневым сердечником 14 помехового электромагнитного излучения, приходящего из задней полусферы пространства, и электромагнитного излучения соответствующего маяка, отраженного от поверхности объекта, эту антенну экранируют, например, поместив ее в преимущественно проточный кожух, выполненный, например, в виде трубы с поглощающей электромагнитное излучение внутренней поверхностью, с обеспечением предотвращения попадания на антенну 13 электромагнитного излучения, приходящего из задней полусферы пространства, и электромагнитного излучения соответствующего маяка, отраженного от поверхности объекта.
Система позволяет увеличить точность пеленгации и ориентации в пространстве объекта и выдерживания заданной траектории и тем самым, например, повысить безопасность посадки ЛА, упростить и уменьшить весогабаритные характеристики соответствующего бортового оборудования объекта, система всепогодна, возможно использование одной частоты электромагнитного излучения маяка для ориентации по азимуту и углу места, также возможно применение одного маяка. Система проста в реализации, ее точность близка к системам лазерной ориентации, в том числе при посадке, но лишена ее недостатков, легко вписывается в применение с другими системами пеленгации и навигации.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение помехоустойчивости и точности определения азимутального и угломестного направления на соответствующий посадочный радиомаяк. Это достигается за счет увеличения отношения сигнал/шум и использования сложных сигналов с фазовой манипуляцией.
Указанное увеличение обеспечивается тем, что при минимальном уровне ФМн-сигналов первой магнитной антенны 13, что соответствует совпадению направления на посадочный радиомаяк с направлением ферритового стержня сердечника 14 магнитной антенны 13, определение азимутального и/или угломестного положения ЛА осуществляется по ФМн-сигналам второй магнитной антенны 25 с круговой диаграммой направленности, т.е. при максимальном отношении сигнал/шум.
Применение сложных сигналов с фазовой манипуляцией в посадочном радиомаяке обеспечивает их обнаружение и селекцию с высокой достоверностью. Указанные сигналы позволяют реализовать новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять ФМн-сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени вместе с другими сигналами и помехами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2007 |
|
RU2339972C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2012 |
|
RU2514130C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2005 |
|
RU2291575C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515191C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
Предлагаемая система относится к системам, обеспечивающим определение пространственного местоположения объекта, например летательного аппарата (ЛА). Достигаемым техническим результатом изобретения является повышение помехоустойчивости и точности определения азимутального и угломестного направлений на соответствующий маяк. Система содержит передающую систему маяка, снабженную средством формирования электромагнитных сигналов, бортовую приемную систему электромагнитных сигналов, бортовой блок, определитель дальности положения объекта, определитель азимута, определитель угла места, бортовые датчики, блок передачи азимутальной, угломестной и дальномерной информации, индикатор, блок выработки сигналов управления органами обеспечения изменения пространственного положения объекта. Средство формирования электромагнитных сигналов содержит задающий генератор, генератор псевдослучайной последовательности, фазовый манипулятор, усилитель мощности и передающую антенну. Приемная система содержит первую и вторую магнитные антенны, стержневой сердечник, первый и второй радиокабели, приемное устройство, блок селекции, первый и второй усилители высокой частоты, первый и второй амплитудные детекторы, блок деления, первый пороговый блок и первый ключ. Блок селекции содержит первый и второй анализаторы спектра, удвоитель фазы, блок сравнения, второй пороговый блок и второй ключ. 3 ил.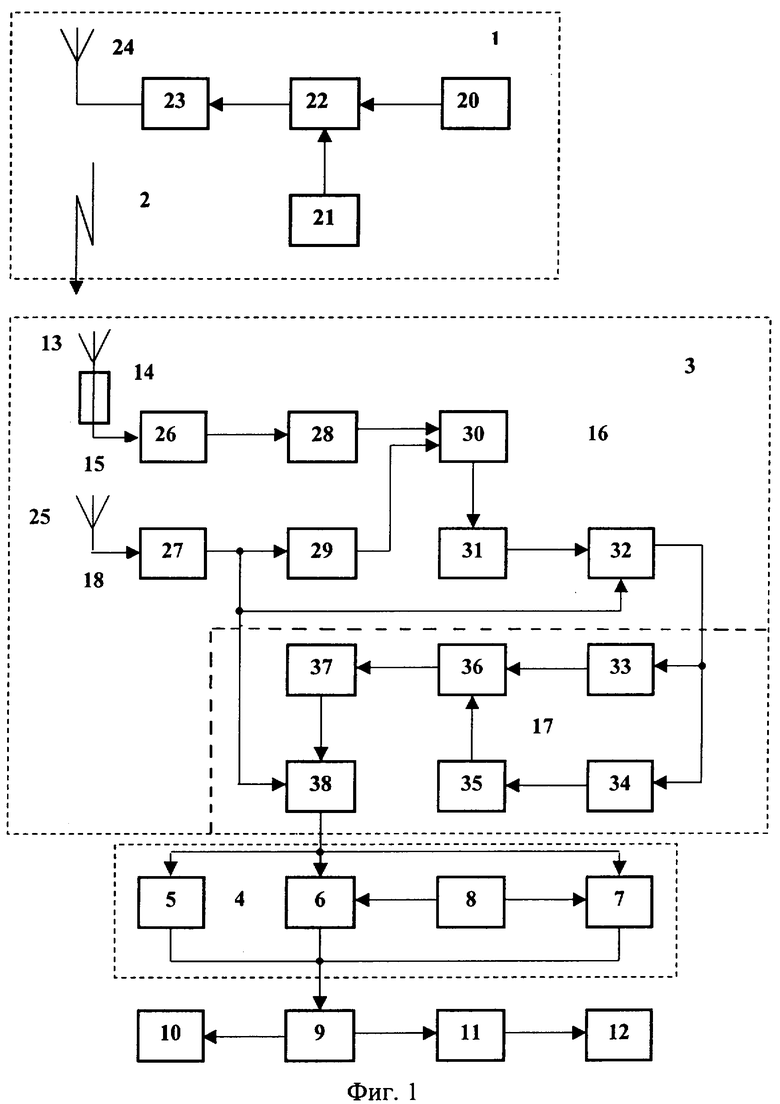
Система определения пространственного положения подвижного объекта, например летательного аппарата, с заданными в правой системе координат его продольной осью ОХ, нормальной осью OY и поперечной осью OZ относительно соответствующего маяка, с использованием бортового оборудования, предназначенного для измерения азимутального и угломестного направлений и дальности подвижного объекта, с использованием электромагнитного канала связи между бортовым оборудованием объекта и соответствующим маяком, содержащая функционально связанные передающую систему маяка, снабженную средством формирования электромагнитных сигналов, бортовую приемную систему электромагнитных сигналов, соединенную с бортовым блоком, включающим функционально связанные определитель дальности положения объекта, определитель азимута и определитель угла места соответственно, соединенные с бортовыми датчиками, формирующими данные о скорости и траектории движения объекта, выделенная из бортового блока информация о местоположении летательного аппарата поступает в блок передачи электромагнитных сигналов азимутальной, угломестной и дальномерной информации и информации об отклонении от заданной траектории для визуального отображения в индикаторе и передачи их в блок выработки сигналов управления органами обеспечения изменения пространственного положения объекта, при этом бортовая приемная система содержит первый радиокабель, приемное устройство, включающее блок селекции принимаемого электромагнитного сигнала, и первую магнитную антенну с диаграммой направленности в форме восьмерки, преимущественно со стержневым сердечником, с заданными в правой системе координат взаимно перпендикулярными продольной ОХ1, нормальной OY1 и продольной OZ1 осями симметрии, продольная ось ОХ1 направлена по оси сердечника первой магнитной антенны, а оси ОХ и ОХ1, OY и OY1, OZ и OZ1 соответственно одинаково ориентированы и направлены, первая магнитная антенна заключена в преимущественно проточный кожух, выполненный, например, в виде трубы с поглощающей электромагнитные сигналы внутренней поверхностью, с обеспечением экранирования электромагнитных сигналов, приходящих из задней полусферы пространства, и электромагнитных сигналов соответствующего маяка, отраженных от поверхности объекта, отличающаяся тем, что бортовая приемная система снабжена второй магнитной антенной с круговой диаграммой направленности, двумя усилителями высокой частоты, двумя амплитудными детекторами, блоком деления, первым пороговым блоком, первым ключом и вторым радиокабелем, причем средство формирования электромагнитных сигналов выполнено в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора псевдослучайной последовательности, усилителя мощности и передающей антенны, в качестве электромагнитных сигналов использованы сложные сигналы с фазовой манипуляцией, блок селекции выполнен в виде последовательно включенных удвоителя фазы, второго анализатора спектра, блока сравнения, второй вход которого соединен с выходом первого анализатора спектра, второго порогового блока и второго ключа, второй вход которого соединен с выходом второго усилителя высокой частоты, а выход подключен к входам определителя азимута, определителя угла места и определителя дальности положения объекта, к выходу первой магнитной антенны через первый радиокабель последовательно подключены первый усилитель высокой частоты, первый амплитудный детектор, блок деления, первый пороговый блок и первый ключ, второй вход которого соединен с выходом второго усилителя высокой частоты, а выход подключен к входам первого анализатора спектра и удвоителя фазы, к выходу второй магнитной антенны через второй радиокабель последовательно подключены второй усилитель высокой частоты и второй амплитудный детектор, выход которого соединен с вторым входом блока деления.
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2132042C1 |
| СИСТЕМА ИНДИКАЦИИ ПОЛОЖЕНИЯ | 1992 |
|
RU2108627C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2305057C1 |
| US 6901331 В1, 31.05.2005 | |||
| US 7075457 В1, 11.07.2006 | |||
| Состав для струйно-абразивной обработки | 1989 |
|
SU1687590A1 |
| DE 60303924 N2, 14.12.2006. | |||

