Изобретение относится к системам самонаведения, в частности к системам самонаведения летательных аппаратов (ЛА) на наземные объекты с помощью радиолокационных средств, установленных на борту ЛА и использующих синтезирование апертуры (СА) антенны или доплеровское обужение луча (ДОЛ) диаграммы направленности антенны.
Под способом наведения аналогично [1, 2] понимается закон формирования требуемой фазовой траектории наводимого объекта, определяемый правилом (алгоритмом) формирования сигналов траекторного управления.
При рассмотрении способов наведения сигналы траекторного управления боковым и продольным движениями ЛА определяются [3, стр.61] требуемыми значениями его бокового и нормального ускорений и считаются пропорциональными параметрам рассогласования


где Δб, Δн - параметры бокового и нормального рассогласований соответственно;
jб, jн - значения бокового и нормального ускорений;
Jбт, jнт - требуемые значения бокового и нормального ускорений.
Специфической особенностью самонаведения ЛА с бортовыми радиолокационными средствами, использующими режимы СА антенны и ДОЛ, на наземные объекты является необходимость формирования криволинейных траекторий наведения ЛА в горизонтальной плоскости с целью обеспечения требуемого линейного азимутального разрешения радиолокационных изображений (РЛИ), формируемых БРЛС в указанных режимах при самонаведении ЛА.
При определенных допущениях, указанных в [4, стр.38], для обеспечения требуемого линейного азимутального разрешения траектория движения ЛА должна быть такой, чтобы бортовой пеленг наземного объекта удовлетворял условию

где ϕГТ - требуемый угол в горизонтальной плоскости между линией визирования наземного объекта и направлением вектора скорости ЛА в земной системе координат (требуемый бортовой пеленг наземного объекта);
Д - значение текущей дальности от наводимого ЛА до наземного объекта;
v - значение скорости наводимого ЛА;
ΔF - полоса пропускания доплеровского фильтра в режиме СА (ДОЛ);
λ - длина волны БРЛС;
ΔlТ - требуемое линейное азимутальное разрешение РЛИ на дальности, соответствующей расстоянию от наводимого ЛА до наземного объекта.
Очевидно, что для наземных объектов, скорость изменения положения которых, как правило, пренебрежимо мала по сравнению со скоростью полета наводимого ЛА, траектории наведения ЛА, удовлетворяющие (3), при фиксированных начальных значениях Д и V, детерминированном законе изменения V, а также фиксированных ΔF, λ и Δ1Т определяются единственным образом исходя из требуемых значений ϕГТ. С учетом этого задача наведения ЛА с БРЛС, использующими режимы СА или ДОЛ, на неподвижные и малоподвижные наземные объекты может рассматриваться как задача формирования криволинейных траекторий наведения, максимально приближенных к требуемым, при априорно заданных ограничениях на боковые ускорения движения ЛА в горизонтальной плоскости.
Известные способы наведения ЛА на наземные объекты основаны на учете угловых ошибок управления (способы прямого наведения) и угловой скорости линии визирования наземного объекта (способы пропорционального наведения).
Одним из основных недостатков способа наведения на наземные объекты, использующего угловые ошибки управления, является низкая точность наведения на конечном участке, в том числе вследствие влияния ветра [5, с.189].
Одним из основных недостатков способов наведения на наземные объекты, основанных на  учете угловой скорости линии визирования, является недостаточная управляемость наводимого ЛА на начальных участках траектории наведения (особенно при боковом ветре) при большой дальности до цели, когда угловая скорость линии визирования наземного объекта еще невелика.
учете угловой скорости линии визирования, является недостаточная управляемость наводимого ЛА на начальных участках траектории наведения (особенно при боковом ветре) при большой дальности до цели, когда угловая скорость линии визирования наземного объекта еще невелика.
В предположении независимости каналов управления ЛА в горизонтальной и вертикальной плоскостях в [1] предложен способ наведения ЛА с бортовыми радиолокационными станциями (БРЛС), использующими режимы СА или ДОЛ, на наземные объекты, в котором для объекта управления, угловое положение которого относительно наземной цели определяется системой уравнений:

где ϕГ - бортовой пеленг наземного объекта в горизонтальной плоскости;
ωГ= Г - угловая скорость линии визирования в горизонтальной плоскости;
Г - угловая скорость линии визирования в горизонтальной плоскости;
Д - дальность от ЛА до наземного объекта;
VСБ - скорость сближения ЛА с наземным объектом;
ξϕГ, ξωГ - соответственно шумы возмущений по бортовому пеленгу наземного объекта и угловой скорости линии визирования,
измеряют значения дальности от наводимого ЛА до наземного объекта и скорости их сближения, а также значения скорости наводимого ЛА и его ускорения в горизонтальной плоскости, формируют сигнал управления в горизонтальной плоскости по соотношению

где ΔГ - сигнал управления (параметр рассогласования) в горизонтальной плоскости;
qϕГ, qωГ - коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования в горизонтальной плоскости;
kjГ - коэффициент, определяющий экономичность наведения в горизонтальной плоскости;
Д - значение дальности от наводимого ЛА до наземного объекта;
VСБ - значение скорости сближения наводимого ЛА с наземным объектом;
ϕГ - значение бортового пеленга в горизонтальной плоскости;
ωГ - значение угловой скорости линии визирования в горизонтальной плоскости;
jГ - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости;
ϕГТ - требуемый угол упреждения, рассчитываемый в соответствии с соотношением (3).
Недостатками данного способа являются:
- априорное задание штрафов qϕГ/kjГ и qωГ/kjГ без учета реальных условий наведения ЛА в каждом конкретном случае;
- необходимость использования различных алгоритмов формирования сигналов траекторного управления движением ЛА при наведении на наземные объекты в режимах работ БРЛС без СА или ДОЛ и с режимами СА или ДОЛ.
Наиболее близким аналогом (прототипом) настоящего изобретения является способ пропорционального наведения летательных аппаратов на наземные объекты, предложенный в [2], заключающийся в том, что для объекта управления, угловое положение которого относительно наземной цели определяется системой уравнений (4), (5), измеряют значения скорости сближения наводимого летательного аппарата и наземного объекта, угловой скорости линии визирования в горизонтальной плоскости, а также поперечного ускорения наводимого летательного аппарата в горизонтальной плоскости, сигнал управления в горизонтальной плоскости формируют по соотношению

где N0 - коэффициент, называемый навигационным параметром, рассчитываемый исходя из условия
где Д0, ДК - значения дальностей начала и окончания наведения;
(- ) - значение скорости сближения наводимого летательного аппарата с наземным объектом;
) - значение скорости сближения наводимого летательного аппарата с наземным объектом;
ΔωГТР - значение требуемого приращения угловой скорости линии визирования в горизонтальной плоскости, называемое требуемым смещением;
ωГ - значение угловой скорости линии визирования в горизонтальной плоскости;
jГ - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости.
Требуемое смещение ΔωГТР рассчитывают из условия обеспечения стабилизации требуемого линейного разрешения в горизонтальной плоскости по соотношению

где КУСТ - коэффициент, определяющий точность наведения и стабилизацию линейного разрешения в горизонтальной плоскости;
λ, ΔF, ΔιT - имеют тот же смысл, что и в выражении (3).
Из сопоставления выражений (3) и (8) видно, что ΔωГТР ≈  ГТ при малых значениях ϕГТ, а КУСТ ≈ -
ГТ при малых значениях ϕГТ, а КУСТ ≈ - /V.
/V.
К недостаткам известного способа наведения (прототипа) можно отнести то, что на больших расстояниях до наземного объекта, когда ωГ ≈ 0, управление ЛА определяется требуемым смещением ΔωГТР, не учитывающим влияние реальных условий полета, в том числе бокового ветра. По этой причине возможно отклонение реальной траектории полета, наводимого ЛА, от требуемой.
Кроме того, при изменении условий функционирования ЛА, например при изменении начальной дальности от ЛА до наземного объекта, необходимо изменять значение навигационного параметра N0.
Априорное задание значений коэффициента КУСТ в (8) вне взаимосвязи со значениями дальности до наземного объекта и скорости наводимого ЛА может приводить к разбросу параметров формируемых траекторий наведения ЛА в зависимости от значений величин  и V в каждом конкретном случае.
и V в каждом конкретном случае.
Задачей настоящего изобретения является разработка способа наведения летательных аппаратов на наземные объекты, обеспечивающего высокую точность наведения, формирование реальной траектории полета ЛА с высокой требуемой точностью при использовании режимов СА или ДОЛ в БРЛС, инвариантного к дальности начала наведения, совместимого с процессами управления ЛА при работе БРЛС без СА или ДОЛ.
Решение поставленной задачи достигается тем, что реализуется способ пропорционального наведения на виртуальный движущийся наземный объект, координаты которого в земной невращающейся системе координат и угловая скорость визирования формируются в горизонтальной плоскости исходя из условия обеспечения требуемой криволинейной траектории наведения ЛА с БРЛС, использующей СА или ДОЛ, на реальный наземный объект.
Предлагаемый способ наведения осуществляет следующий алгоритм траекторного управления в горизонтальной плоскости

где ΔГ - параметр рассогласования в горизонтальной плоскости;
N0 - навигационный параметр;
(- В) - значение скорости сближения наводимого ЛА с виртуальным наземным объектом;
В) - значение скорости сближения наводимого ЛА с виртуальным наземным объектом;
ωГВ - значение угловой скорости линии визирования виртуального наземного объекта в горизонтальной плоскости;
ΔωГСВ - значение смещения угловой скорости линии визирования виртуального наземного объекта в горизонтальной плоскости, необходимое в случае использования для слежения за виртуальным наземным объектом угломерной системы с астатизмом 1-го порядка;
jГ - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости.
Параметры движения виртуального наземного объекта, по которым определяется значение угловой скорости ΔωГВ линии визирования этого объекта, формируются следующим образом.
Угол визирования виртуального наземного объекта в горизонтальной плоскости определяется выражением

где εГ - значение угла визирования реального наземного объекта в горизонтальной плоскости в процессе наведения;
ϕГТ - требуемое значение смещения направления вектора скорости ЛА относительно линии визирования реального наземного объекта, определяемое в соответствии с выражением (3), исходя из условий обеспечения требуемого линейного разрешения ΔιТ в горизонтальной плоскости;
k1 - коэффициент, определяющий начальное положение линии визирования виртуального наземного объекта и скорость изменения ее направления в горизонтальной плоскости.
Значение скорости сближения наводимого ЛА с виртуальным наземным объектом определяется выражением
где V - скорость движения наводимого ЛА в горизонтальной плоскости;
k2 - коэффициент, определяющий начальную дальность от наводимого ЛА до виртуального наземного объекта и скорость их сближения.
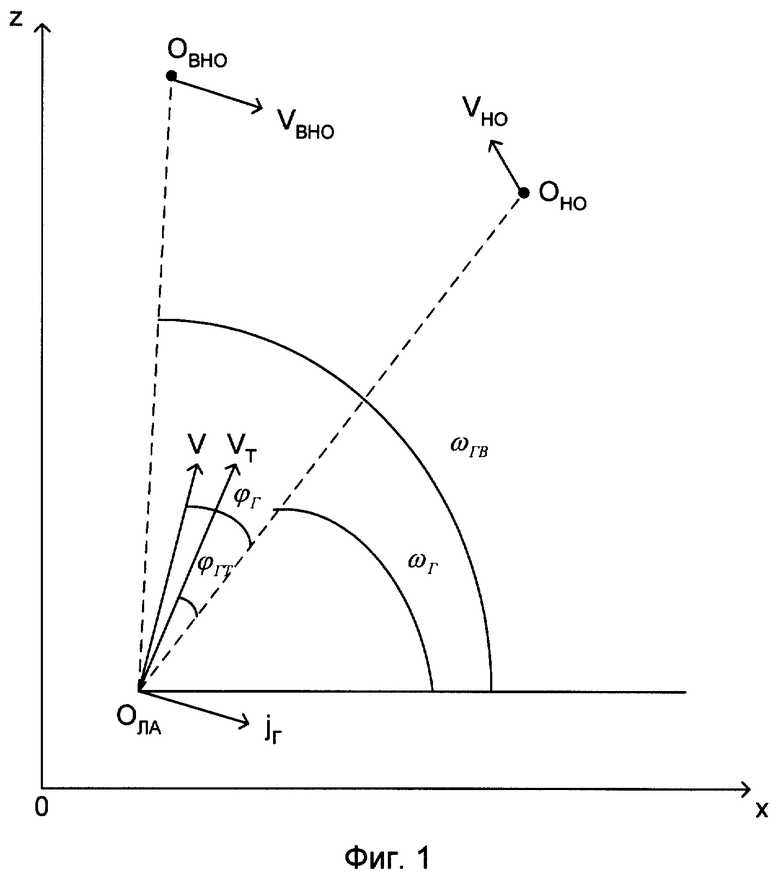
Фиг.1 поясняет геометрические соотношения между координатами абсолютного и относительного движения наводимого ЛА, реального наземного объекта и виртуального наземного объекта в горизонтальной плоскости, где:
XOZ - земная невращающаяся система координат;
ОЛА - текущее расположение ЛА;
ОНО - текущее положение реального наземного объекта;
ОВНО - текущее положение виртуального наземного объекта;
VНО и VВНО - вектора, характеризующие скорость реального наземного объекта и виртуального наземного объекта;
VТ и V - требуемый и фактический вектора скорости ЛА;
ϕГТ - требуемое значение бортового пеленга реального наземного объекта, определяемое исходя из условий обеспечения требуемого линейного разрешения ΔιT в горизонтальной плоскости;
ϕГ - фактическое значение бортового пеленга реального наземного объекта в горизонтальной плоскости;
jГ - поперечное ускорение ЛА в горизонтальной плоскости;
εГ и εГВ - углы визирования реального наземного объекта и виртуального наземного объекта в горизонтальной плоскости.
На фиг.2 представлена упрощенная структурная схема возможного варианта системы наведения ЛА на наземные объекты, реализующей предлагаемый способ наведения, где:
1 - антенная система БРЛС;
2 - переключатель прием-передача БРЛС;
3 - передатчик БРЛС;
4 - синхронизатор БРЛС;
5 - приемник БРЛС;
6 - автоматический селектор БРЛС;
7 - вычислитель параметров движения виртуального наземного объекта;
8 - вычислитель сигнала управления;
9 - система управления;
10 - летательный аппарат;
11 - измеритель скорости движения ЛА в горизонтальной плоскости;
12 - акселерометр.
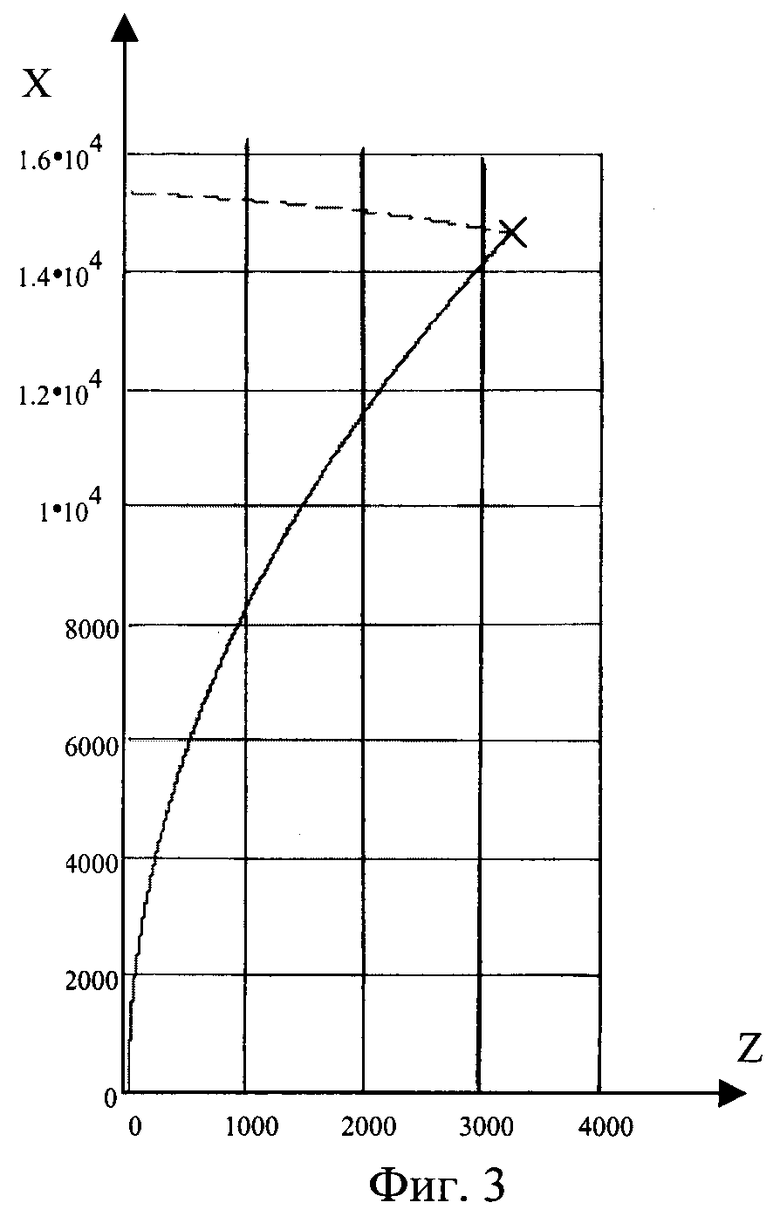
На фиг.3 знаком “x” отмечен реальный наземный объект, сплошной линией изображена траектория наведения ЛА, пунктирной линией - траектория движения виртуального наземного объекта, полученные при значении коэффициента k1=1 и скорости сближения (- ) наводимого ЛА с виртуальным наземным объектом, равной скорости движения ЛА в горизонтальной плоскости.
) наводимого ЛА с виртуальным наземным объектом, равной скорости движения ЛА в горизонтальной плоскости.
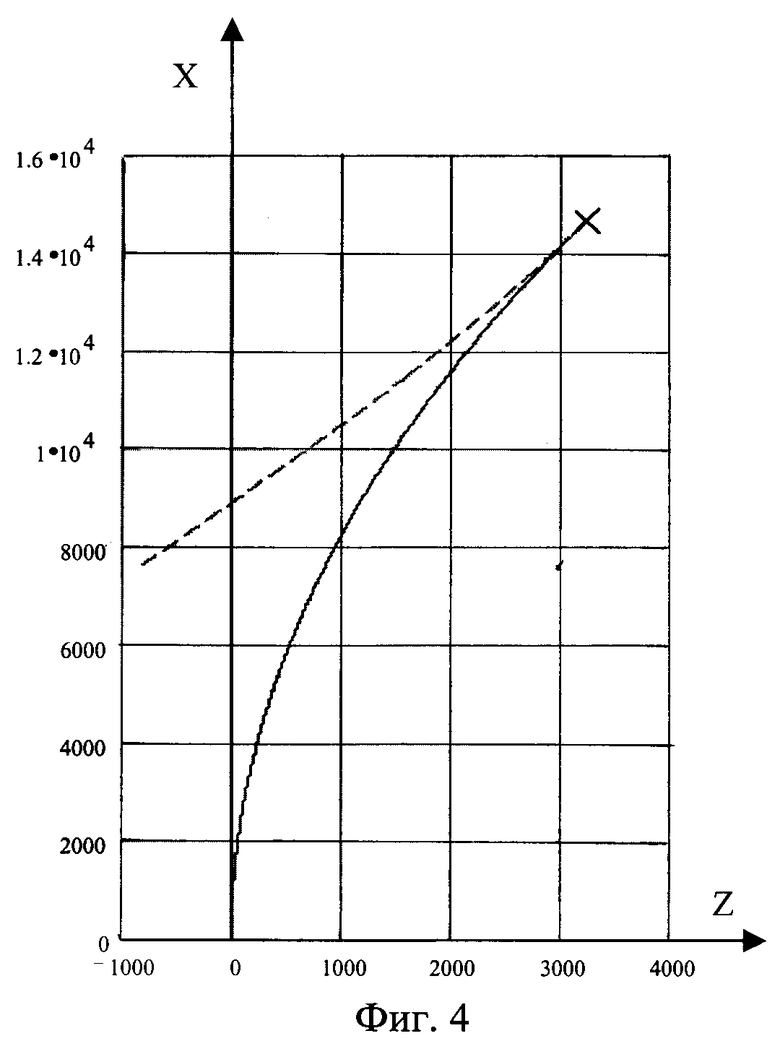
На фиг.4 знаком “x” отмечен реальный наземный объект, сплошной линией изображена траектория наведения ЛА, пунктирной линией - траектория движения в горизонтальной плоскости виртуального наземного объекта, полученные при значении коэффициента k1=1,5 и скорости сближения (- ) ЛА с виртуальным наземным объектом, в 2 раза меньшей скорости движения ЛА в горизонтальной плоскости (k2=0,5).
) ЛА с виртуальным наземным объектом, в 2 раза меньшей скорости движения ЛА в горизонтальной плоскости (k2=0,5).
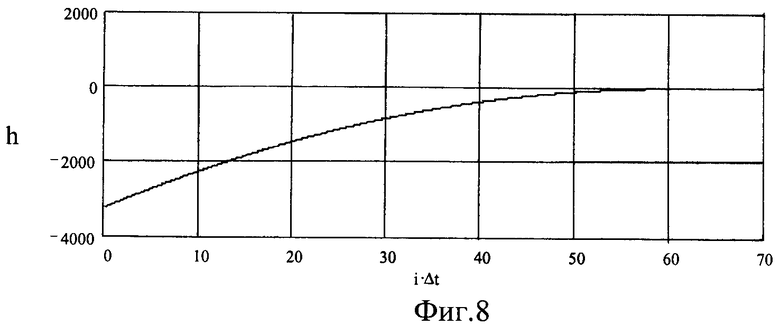
Фиг.5-8 иллюстрируют эффективность предлагаемого изобретения.
Рассмотрим, как функционирует один из возможных вариантов системы наведения ЛА на наземные объекты при использовании заявляемого способа наведения (фиг.2).
Моноимпульсная антенная система 1 БРЛС осуществляет излучение зондирующих радиолокационных сигналов, поступающих через переключатель приема-передачи 2 от передатчика 3, управляемого синхронизатором 4 БРЛС, а также прием отраженных сигналов, обеспечивая их пространственную селекцию. Через переключатель приема-передачи 2 БРЛС принимаемые сигналы поступают на вход приемника 5 БРЛС, в котором происходит выделение сигнала от наземного объекта на фоне шумов, за счет узкополосной доплеровской фильтрации при использовании СА или ДОЛ. С выхода приемника 5 сигналы поступают на вход автоматического селектора БРЛС 6, которым осуществляется слежение за сигналом реального наземного объекта, измерение дальности до него, определение его углового пеленга в горизонтальной плоскости за счет моноимпульсной обработки, а также по результатам узкополосной доплеровской фильтрации при использовании СА или ДОЛ и данным о величине скорости ЛА в горизонтальной плоскости, поступающим от измерителя скорости 11, измерение скорости сближения наводимого ЛА и наземного объекта, измерение угловой скорости линии визирования реального наземного объекта в горизонтальной плоскости, управление азимутальным положением моноимпульсной диаграммы направленности антенны.
Измеренные значения поступают в вычислитель 7 параметров движения виртуального наземного объекта БРЛС, в котором исходя из условия (3) обеспечения требуемого бортового пеленга реального наземного объекта вычисляются текущие координаты виртуального наземного объекта в горизонтальной плоскости, определяется угловая скорость линии визирования виртуального наземного объекта, значение смещения угловой скорости линии визирования виртуального наземного объекта, необходимое в случае использования для оценки угловой скорости линии визирования виртуального наземного объекта системы слежения с астатизмом 1-го порядка.
Вычисленные значения суммы ΔωГВ+ωГСВ поступают в вычислитель сигнала управления 8, в котором по соотношению (9) формируют сигнал управления в горизонтальной плоскости, используя данные акселерометра 12, измеряющего собственное поперечное ускорение ЛА в горизонтальной плоскости. В системе управления 9 происходит преобразование сформированного сигнала управления в горизонтальной плоскости в соответствующие управляющие воздействия, которые поступают на управляющие органы самого ЛА 10.
Для оценки эффективности предлагаемого способа наведения было проведено моделирование системы наведения ЛА, угловое положение которого относительно виртуальной наземной цели определяется системой уравнений (4), (5). Целью моделирования являлось исследование возможностей предложенного способа наведения по обеспечению требуемого азимутального линейного разрешения в горизонтальной плоскости и требуемой точности наведения. В процессе моделирования были приняты следующие допущения:
в качестве одного из показателей качества функционирования алгоритма траекторного управления ЛА была принята величина отклонения фактического бортового пеленга наземного объекта в горизонтальной плоскости от требуемого

где ϕГ - фактическое значение бортового пеленга наземного объекта в горизонтальной плоскости;
ϕГТ - требуемое значение бортового пеленга наземного объекта, соответствующее требуемому линейному азимутальному разрешению ΔlT в горизонтальной плоскости;
в качестве другого показателя качества функционирования алгоритма траекторного управления был принят текущий промах в горизонтальной плоскости, который определялся по соотношению
где Д - дальность от ЛА до реального наземного объекта;
εГ= - угловая скорость линии визирования реального наземного объекта в горизонтальной плоскости;
- угловая скорость линии визирования реального наземного объекта в горизонтальной плоскости;
(- ) - скорость сближения ЛА с реальным наземным объектом.
) - скорость сближения ЛА с реальным наземным объектом.
Исследования проводились посредством моделирования во времени следующих параметров: Д - дальности от ЛА до реального наземного объекта; ДВ - дальности от ЛА до виртуального наземного объекта; ϕГ - фактического бортового пеленга наземного объекта в горизонтальной плоскости; ϕГТ - требуемого бортового пеленга наземного объекта; ХВ, ZВ - координат виртуального наземного объекта в земной неподвижной системе координат XOZ; X, Z - координат ЛА в земной неподвижной системе координат XOZ; εГ, εГВ - углов визирования наземного объекта и виртуального наземного объекта в горизонтальной плоскости; ωГВ - угловой скорости линии визирования виртуального наземного объекта в горизонтальной плоскости; (- ) - значения скорости сближения с виртуальным наземным объектом; ΔГ - сигнала управления (параметра рассогласования) в горизонтальной плоскости; h-текущего промаха.
) - значения скорости сближения с виртуальным наземным объектом; ΔГ - сигнала управления (параметра рассогласования) в горизонтальной плоскости; h-текущего промаха.
При этом значение ϕГТ вычислялось по (3), сигнал управления - по (9), величина отклонения фактического бортового пеленга наземного объекта в горизонтальной плоскости от требуемого - по (12), текущий промах - по (13), угол визирования εГВ виртуального наземного объекта в горизонтальной плоскости определялся по (10), скорость сближения (- ) с виртуальным наземным объектом - по (11). Угловая скорость линии визирования ωГВ виртуального наземного объекта в горизонтальной плоскости определялась с использованием модели угломера со скоростной коррекцией и индикаторной стабилизацией [5, с.266, рис.10.3] по данным об угле визирования εГВ виртуального наземного объекта, направлении вектора скорости ЛА и бортовом пеленге виртуального наземного объекта в горизонтальной плоскости. Текущее местоположение ЛА определялось путем счисления координат.
) с виртуальным наземным объектом - по (11). Угловая скорость линии визирования ωГВ виртуального наземного объекта в горизонтальной плоскости определялась с использованием модели угломера со скоростной коррекцией и индикаторной стабилизацией [5, с.266, рис.10.3] по данным об угле визирования εГВ виртуального наземного объекта, направлении вектора скорости ЛА и бортовом пеленге виртуального наземного объекта в горизонтальной плоскости. Текущее местоположение ЛА определялось путем счисления координат.
Результаты моделирования, приведенные на фиг.3-8, получены в предположении, что начальное значение дальности от ЛА до наземного объекта Д0=15000 м, начальное положение ЛА в плоскости XOZ определялось координатами Х0=ОМ, Z0=ОМ скорость движения ЛА V=250 м/с, начальное направление вектора скорости движения ЛА соответствует направлению оси ОХ системы координат XOZ, положение реального наземного объекта определялось координатами ХНО=14650 м, ZНО=3227 м, длина волны БРЛС λ=0,032 м, полоса пропускания доплеровского фильтра ΔF=7,8 Гц, требуемое линейное разрешение в горизонтальной плоскости ΔιT=35 м, значение навигационного параметра N0=3.
На фиг.3 приведены траектории наведения ЛА и движения виртуального наземного объекта, полученные в предположении, что начальное направление на виртуальный наземный объект совпадает с начальным направлением вектора скорости движения ЛА (k1=1), начальная дальность до виртуального наземного объекта равна Д0/cos(ϕГТ), скорость (- ) сближения ЛА с виртуальным наземным объектом равна скорости V движения ЛА (k2=1).
) сближения ЛА с виртуальным наземным объектом равна скорости V движения ЛА (k2=1).
На фиг.4 приведены траектории наведения ЛА и движения виртуального наземного объекта, полученные в предположении, что начальное направление на виртуальный наземный объект равно εГТо=π/2+0,5(ϕГТо), где ϕГТо - начальное значение требуемого угла между линией визирования наземного объекта и направлением вектора скорости ЛА в горизонтальной плоскости (k1=1,5), а скорость (- ) сближения ЛА с виртуальным наземным объектом равна V/2(k2=0,5).
) сближения ЛА с виртуальным наземным объектом равна V/2(k2=0,5).
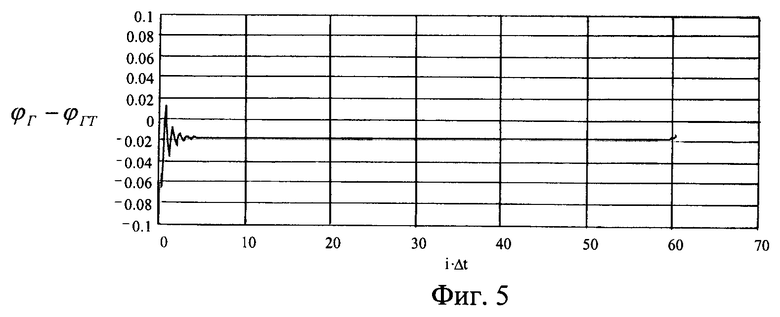
На фиг.5 и 6 приведены зависимости, иллюстрирующие величину отклонения (ϕГ-ϕГТ) получаемого значения ϕГ бортового пеленга наземного объекта от требуемого φГТ в процессе наведения ЛА, соответствующего условиям наведения на виртуальный наземный объект, при которых получены траектории фиг.3 и 4. Величина смещения ωГСВ угловой скорости линии визирования виртуального наземного объекта в горизонтальной плоскости, при этом в обоих случаях полагалась равной нулю. Колебательный процесс изменения величины ϕГ-ϕГТ на фиг.3 и 6 на начальной стадии наведения ЛА отражает переходные процессы “втягивания” угловых контуров сопровождения наземного объекта и виртуального наземного объекта. Данные колебания могут быть значительно уменьшены соответствующим заданием начальных условий.
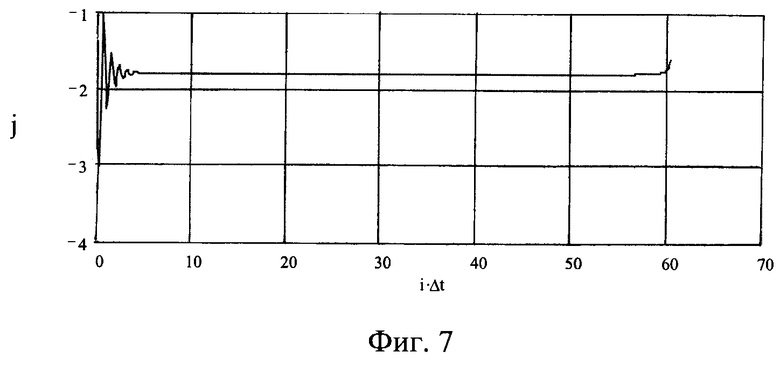
На фиг.7 приведена зависимость поперечного ускорения ЛА в горизонтальной плоскости от времени в процессе наведения. Практически неизменяющаяся величина поперечного ускорения ЛА в горизонтальной плоскости определяет высокую экономичность процесса наведения.
На фиг.8 приведена зависимость значений текущего промаха от времени наведения ЛА. В качестве иллюстрации конкретных значений можно отметить, что расчетная величина текущего промаха на дальности 500 м от наземного объекта составила 3,75 и 3,84 м соответственно для условий формирования траекторий, приведенных на фиг.3 и 4.
В целом по результатам моделирования заявляемого способа наведения можно сделать следующие выводы.
Результаты исследований подтвердили работоспособность предлагаемого способа наведения летательных аппаратов на наземные объекты.
Предлагаемый способ наведения летательных аппаратов на наземные объекты позволяет обеспечить высокую точность формирования криволинейной траектории наведения ЛА на наземный объект, стабилизацию требуемого линейного азимутального разрешения в горизонтальной плоскости при наведении ЛА на наземные объекты с помощью бортовых радиолокационных средств, высокую точность и экономичность наведения.
Использование предлагаемого способа наведения на наземные объекты не налагает никаких дополнительных ограничений на элементную базу и не предъявляет никаких существенных требований к быстродействию и объему памяти вычислителей.
Источники информации
1. Способ наведения летательных аппаратов на наземные объекты. Патент РФ №2164654, МПК F 41 G 7/22.
2. Способ пропорционального наведения летательных аппаратов на наземные объекты. Патент РФ №2148235, МПК F 41 G 7/22.
3. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982.
4. Кононов Е.И., Меркулов В.И., Францев В.В., Шуклин А.И. Универсальный метод наведения самолетов на наземные объекты. - Радиотехника, №5, 2002, стр.36-42.
5. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2. - М.: Радио и связь, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2004 |
|
RU2261411C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |


Изобретение относится к ракетной технике, в частности к системам самонаведения летательных аппаратов (ЛА) на наземные объекты. Сущность изобретения заключается в том, что измеряют скорость ЛА, дальность до наземного объекта, угол между направлением вектора скорости ЛА и направлением на наземный объект, а также поперечное ускорение ЛА в горизонтальной плоскости. Формируют сигнал управления в горизонтальной плоскости при реализации пропорционального наведения на движущийся в горизонтальной плоскости виртуальный наземный объект. Начальное положение и параметры движения последнего задаются исходя из условий обеспечения требуемой криволинейной траектории наведения ЛА на реальный наземный объект с помощью бортовых радиолокационных средств, использующих синтезирование апертуры антенны или доплеровское обужение луча диаграммы направленности антенны. Реализация изобретения позволяет обеспечить высокую точность формирования криволинейной траектории наведения ЛА на наземный объект, стабилизацию требуемого линейного азимутального разрешения в горизонтальной плоскости, а также высокую точность и экономичность наведения. 8 ил.
Способ наведения летательных аппаратов на наземные объекты, заключающийся в том, что измеряют скорость движения наводимого летательного аппарата, дальность до наземного объекта, угол между направлением вектора скорости наводимого летательного аппарата и направлением на наземный объект, а также поперечное ускорение наводимого летательного аппарата в горизонтальной плоскости, отличающийся тем, что сигнал управления в горизонтальной плоскости формируют при реализации пропорционального наведения на движущийся в горизонтальной плоскости виртуальный наземный объект, начальное положение и параметры движения которого задаются, исходя из условий обеспечения требуемой криволинейной траектории наведения летательного аппарата на реальный наземный объект с помощью бортовых радиолокационных средств, использующих синтезирование апертуры антенны или доплеровское обужение луча диаграммы направленности антенны, при этом сигнал управления в горизонтальной плоскости формируют по соотношению

где ΔГ - сигнал управления в горизонтальной плоскости;
N0 - постоянный коэффициент, называемый навигационным параметром;
 - значение скорости сближения наводимого летательного аппарата с виртуальным наземным объектом;
- значение скорости сближения наводимого летательного аппарата с виртуальным наземным объектом;
ωГВ - значение угловой скорости линии визирования виртуального наземного объекта в горизонтальной плоскости;
ΔωГСВ - значение смещения угловой скорости линии визирования виртуального наземного объекта в горизонтальной плоскости, определяемое параметрами движения виртуального наземного объекта;
jГ - значение поперечного ускорения летательного аппарата в горизонтальной плоскости,
а параметры движения виртуального наземного объекта, по которым определяется значение угловой скорости ωГВ линии визирования этого объекта и скорости сближения  наводимого летательного аппарата с виртуальным наземным объектом, определяются выражениями
наводимого летательного аппарата с виртуальным наземным объектом, определяются выражениями
εГВ=εГ+к1·ϕГТ;

где εГ - значение угла визирования реального наземного объекта в горизонтальной плоскости в процессе наведения;
ϕГТ - требуемое значение смещения направления вектора скорости летательного аппарата относительно линии визирования реального наземного объекта, определяемое из условия обеспечения требуемого линейного азимутального разрешения в горизонтальной плоскости;
к1 - коэффициент, определяющий начальное положение линии визирования виртуального наземного объекта и скорости изменения ее направления в горизонтальной плоскости;
V - скорость движения наводимого летательного аппарата;
к2 - коэффициент, определяющий начальную дальность от наводимого летательного аппарата до виртуального наземного объекта и скорость их сближения.
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4898341, 06.02.1990 | |||
| US 4542870, 24.09.1985 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| DE 3643975 А1, 30.06.1988. | |||

