Изобретение относится к деталям машин и может быть использовано в составе изделий авиационной и ракетной техники.
Известен волновой привод, содержащий корпус, размещенные в нем электродвигатель и волновую передачу, генератор волн которой жестко связан с ротором электродвигателя [1]. Недостатком этого волнового привода является значительные габариты, вызванные значительным объемом, занимаемым волновой передачей.
Этого недостатка лишен выбранный в качестве прототипа волновой привод, содержащий корпус, установленный в нем на двух подшипниках выходной вал, волновую передачу с неподвижным гибким колесом, жестким колесом, жестко связанным с выходным валом и размещенным внутри гибкого колеса генератором волн, при этом внутри гибкого колеса размещен выступ корпуса с расточкой с установленным на ее торцевой стенке электродвигателем, а генератор волн снабжен зубчатым венцом, входящим в зацепление с n (n=1, 2 и т.д.) сателлитами, введенными в зацепление с шестерней на валу электродвигателя [2].
Недостатком такого волнового привода является значительные осевые габариты и масса, что обусловлено последовательным расположением подшипников выходного вала и участка выходного вала, служащего для монтажа исполнительного устройства, а также наличием внешнего корпуса в виде цилиндра большого диаметра. Его основное назначение - обеспечивать точное взаиморасположение подшипников выходного вала во время эксплуатации. В условиях авиационной и особенно ракетной техники наличие избыточной массы и габаритов крайне нежелательно, что объясняется малыми располагаемыми для размещения агрегатов объемами и высокой удельной стоимостью вывода груза на орбиту.
Задачей, решаемой с помощью заявленного изобретения, является снижение осевых габаритов и массы.
Эта задача решается за счет того, что в известном волновом приводе, содержащем корпус, установленный в нем на двух подшипниках выходной вал, волновую передачу с неподвижным гибким колесом, жестким колесом, жестко связанным с выходным валом и размещенным внутри гибкого колеса генератором волн, при этом внутри гибкого колеса размещен выступ корпуса с расточкой с установленным на ее торцевой стенке электродвигателем, а генератор волн снабжен зубчатым венцом, входящим в зацепление с n (n=1, 2 и т.д.) сателлитами, введенными в зацепление с шестерней на валу электродвигателя, согласно изобретению на торцевой стенке выступа корпуса со стороны, противоположной электродвигателю, выполнен соосный выступу палец, выходной вал выполнен полым, охватывающим палец, и подшипники выходного вала размещены между внутренней поверхностью его полости и наружной поверхностью пальца, а на выступе корпуса выполнены n пазов для размещения сателлитов.
На чертеже приведен пример конкретного выполнения волнового привода, продольный разрез.
Волновой привод содержит корпус 1, установленный в нем на двух подшипниках 2 выходной вал 3 и волновую передачу 4 с неподвижным гибким колесом 5. Жесткое колесо 6 волновой передачи 4 жестко связано - в данном примере выполнено заодно - с выходным валом 3. Внутри гибкого колеса 6 размещены генератор волн 7 и выступ 8 корпуса 1 с расточкой 9. На ее торцевой стенке 10 установлен электродвигатель 11. Генератор волн 7 снабжен зубчатым венцом 12, входящим в зацепление с тремя сателлитами 13, введенными в зацепление с шестерней 14 на валу электродвигателя 11. На торцевой стенке 15 выступа 8 корпуса 1 со стороны, противоположной электродвигателю 11, выполнен соосный выступу 8 палец 16. Выходной вал 3 выполнен полым, охватывающим палец 16. Подшипники 2 выходного вала 3 размещены между внутренней поверхностью 17 его полости и наружной поверхностью пальца 16. На выступе 8 корпуса 1 выполнены три паза 18 для размещения сателлитов 13, которые установлены в них на осях 19. В приведенном примере конкретного выполнения число сателлитов 13 и вырезов 18 равно трем, однако оно может быть произвольным равным n, начиная от одного, и ограничено лишь геометрическими параметрами передачи 4 и условием прочности выступа 8, т.к. при значительном числе сателлитов сечение выступа сильно ослабляется значительным числом вырезов 18. Генератор волн 7 может вращаться относительно выступа 8 на подшипнике 20.
Волновой привод работает следующим образом. При включении электродвигателя 11 вращение его вала через шестерню 14 и сателлиты 13 передается на зубчатый венец 12 генератора волн 7. Генератор волн 7, вращаясь на подшипнике 20, деформирует гибкое колесо 5, вводит его в зацепление с жестким колесом 6 и приводит в движение жесткое колесо 6 и выходной вал 3, вращающийся на подшипниках 2, установленных на пальце 16. Совокупность всех указанных существенных признаков позволяет устранить внешнюю часть корпуса, присутствующую в прототипе, и за счет этого существенно снизить массу корпуса, при этом база между подшипниками 2 и их диаметр остаются неизменными. Кроме того, осевые габариты волнового привода также уменьшаются на величину выступания вала из корпуса в прототипе, т.к. монтаж исполнительного устройства может быть осуществлен на наружную поверхность выходного вала 3, в отличие от прототипа, не закрытую корпусом. По предварительным расчетам, снижение осевых габаритов составляет около 10%, а снижение массы - около 10-12%. Особенности применения агрегатов в необитаемых отсеках изделий ракетно-космической техники - отсутствие посторонних незакрепленных предметов - позволяют использовать заявленный волновой привод в изображенной на иллюстрации комплектации. При необходимости гибкое и жесткое колеса могут быть закрыты ограждающим кожухом. Т.к. последний не несет никаких нагрузок, он может быть выполнен из материалов с низкой плотностью (пластмассы, магниевые сплавы) и иметь незначительную толщину, что позволяет, даже при наличии такого кожуха, получить снижение массы по сравнению с прототипом.
Указанные преимущества позволяют рекомендовать заявленный привод к использованию в агрегатах авиационной и космической техники.
Литература
1. В.Н.Руденко. "Планетарные и волновые передачи". М., "Машиностроение", 1980, стр.118, лист 67, рис.1.
2. Е.Г.Гинзбург. "Волновые зубчатые передачи". Л., "Машиностроение", 1969, стр.125, рис.60 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2285844C2 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2000 |
|
RU2174205C1 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2280798C2 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2131544C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2136986C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2168078C1 |
| ВОЛНОВОЙ ПРИВОД | 1996 |
|
RU2110711C1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
Изобретение относится к деталям машин и может быть использовано в составе изделий авиационной и ракетной техники. Волновой привод содержит корпус 1, выходной вал 3, волновую передачу с неподвижным гибким колесом 5. Его жесткое колесо 6 жестко связано с выходным валом 3 и размещенным внутри гибкого колеса 5 генератором волн 7. Внутри гибкого колеса 5 размещен выступ 8 корпуса 1 с расточкой 9 с установленным на ее торцевой стенке электродвигателем 11. Зубчатый венец генератора волн 7 зацеплен с сателлитами 13. Сателлит 13 зацеплен с шестерней 14 на валу электродвигателя 11. На торцевой стенке 15 выступа 8 корпуса со стороны, противоположной электродвигателю 11, выполнен соосный выступу палец 16. Выходной вал 3 выполнен полым и охватывает палец. Подшипники 2 выходного вала размещены между его внутренней поверхностью и наружной поверхностью пальца 16. На выступе 8 корпуса 1 выполнены n пазов для размещения сателлитов 13. Технический результат - снижение осевых габаритов и массы. 1 ил.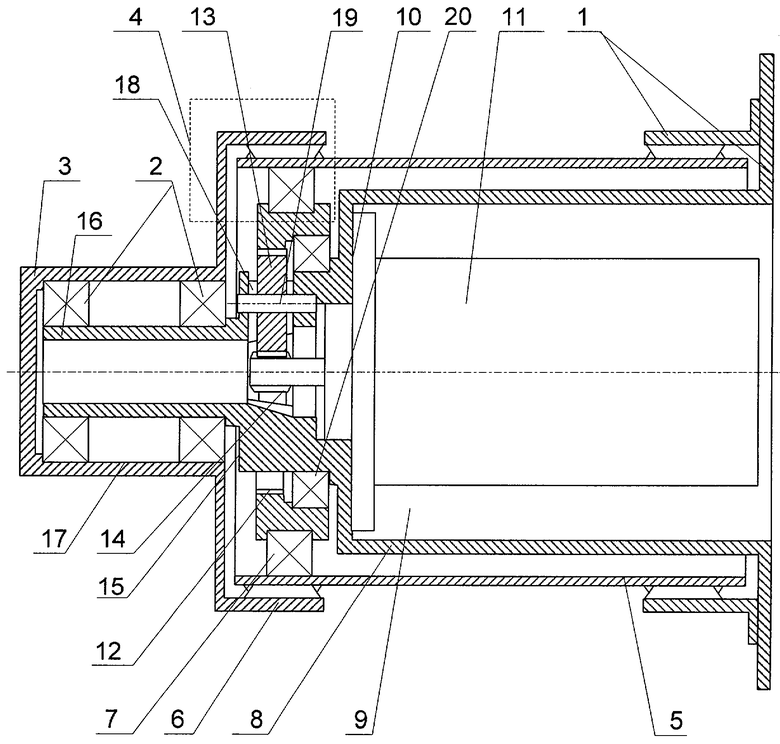
Волновой привод, содержащий корпус, установленный в нем на двух подшипниках выходной вал, волновую передачу с неподвижным гибким колесом, жестким колесом, жестко связанным с выходным валом и размещенным внутри гибкого колеса генератором волн, при этом внутри гибкого колеса размещен выступ корпуса с расточкой с установленным на ее торцевой стенке электродвигателем, а генератор волн снабжен зубчатым венцом, входящим в зацепление с n (n=1, 2 и т.д.) сателлитами, введенными в зацепление с шестерней на валу электродвигателя, отличающийся тем, что на торцевой стенке выступа корпуса со стороны, противоположной электродвигателю, выполнен соосный с выступом палец, выходной вал выполнен полым, охватывающим палец, и подшипники выходного вала размещены в его полости между внутренней поверхностью выходного вала и наружной поверхностью пальца, а на выступе корпуса выполнены n пазов для размещения сателлитов.
| Е.Г.ГИНЗБУРГ «Волновые зубчатые передачи» | |||
| Л.: Машиностроение, 1969, с.125, рис.60 | |||
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2000 |
|
RU2174205C1 |
| US 3986412 A, 19.10.1976. | |||

