Изобретение относится к антеннам, в том числе и к антеннам спутникового телевидения, а более конкретно к поворотным опорам антенн с механизмами их вращения и развертывания, установленных на подвижных объектах, в частности автомашинах.
Известно опорно-поворотные устройство (ОПУ), азимутальная часть которого представляет собой вертикальную колонну, основание которой крепится к фундаменту. (См. А. М. Покрас, А.М.Сомов, Г.Г.Цуриков. Антенны земных станций спутниковой связи. -М.: Радио и связь, 1985, стр. 86-89).
Азимутальное вращение антенны обеспечивается благодаря поворачивающейся внутри колонны на двух подшипниках трубе, на которой неподвижно закреплена горизонтальная платформа, на стойках которой установлены подшипниковые узлы, в которых поворачивается угломестная часть ОПУ с помощью винтового толкателя с редуктором, установленным на платформе.
Один конец толкателя упирается с помощью гайки с карданным закреплением в нижний угол рамы, другой конец соединен с редуктором.
Длина винтового толкателя выбрана из условия обеспечения установки антенны с максимально возможным углом места.
Конструкция механизма для поворота антенны по азимуту аналогична: редуктор с двигателем привода устанавливаются на кронштейне колонны, один конец винтового толкателя с помощью гайки с карданным закреплением упирается в специальный подкос на горизонтальной платформе, другой соединен с редуктором привода.
Недостатком этого ОПУ является его малый угол поворота вокруг азимутальной оси, обусловливаемый длиной винтового толкателя азимутального механизма и необходимостью его перестановки, а также невозможность выполнения одним из приводом функций обоих приводов несмотря на идентичность конструкций приводов угла места и азимутального.
Известна также установка фазированной антенной решетки (ФАР), являющейся составной частью наземной радиолокационной станции (РЛС) и размещенной на передвижном автомобильном фургоне, с приводами, обеспечивающими вращение ФАР по азимуту с целью ее установки в определенной зоне и для наклона ФАР по углу места при развертывании из походного положения в рабочее. (См. Курсовое проектирование механизмов РЭС. Под редакцией проф. Г.И.Рошина. М. "Высшая школа". 1991, с. 43).
Установка включает в себя ОПУ, ФАР, привод наклона ФАР с электродвигателем и ручным приводом, прикрепленным к нижней части корпуса ОПУ. Привод наклона установлен вне фургона (на крыше), частота вращения 1...10 об/мин. ОПУ имеет датчик азимута (ДА), выдающий информацию о положении ФАР по азимуту. Установка содержит также привод поворота ФАР по азимуту с электродвигателем и ручным приводом. Корпус ОПУ состоит из двух частей с разъемом поперек оси вала азимутального привода, установленного в конических роликоподшипниках.
Недостатком ОПУ установки ФАР является автономность приводом наклона ФАР и приводов поворота ФАР пол азимуту (автоматических и ручных), необходимость в которой необязательна, что приводит к нерациональным затратам средств на изготовление ОПУ и приводов и нерациональному использованию объема автомобильного фургона.
Наиболее близким по технической сущности и совокупности признаков к заявляемому ОПУ является ОПУ (пат. N 3412404, США, 1968), содержащий устройства подъема рефлектора и поворота его вокруг азимутальной оси, которые выполнены в виде цилиндрических шарниров.
Рефлектор антенной системы размещены на вилке шарнира устройства подъема.
За счет энергии оператора рефлектор переводится из положения транспортирования в рабочее положение.
Подобные конструкции антенных систем применяются совместно с рефлекторами малых размеров.
Применение высокоскоростных антенных систем с большими размерами зеркал антенн, снабженных управляемыми автоматизированными и ручными приводами одновременно, приводит к использованию азимутальных и угломестных устройств с большими редукциями и вращающими моментами и сопряжено с большими габаритами антенных систем в целом и приводных устройств ОПУ.
Недостатками ОПУ, выбранного в качестве прототипа являются нерациональное использование объема салона автомашины, т.е. высокий процент заполнения объема салона автомашины в ущерб радиоаппаратуре станции крупногабаритными поворотной опорой, электроприводами с механизмами и ручными приводами, блоками управления вращением и развертыванием антенной системы, высокие трудоемкость и стоимость изготовления ОПУ и аппаратуры управления, сложность конструкций механизмов подъема и вращения антенной системы, а также большая величина момента инерции вращающихся масс, размещенных на платформе, и значительный транспортируемый вес на подвижном объекте.
Сущность изобретения является решение задачи расширения функциональных возможностей одного отдельного механизма путем совмещения выполняемых им функций с придаваемыми ему дополнительными функциями, выполнявшимися ранее до совмещения другим автономным механизмом и неидентичными с функциями первого механизма и его удаления из состава ОПУ.
При осуществлении изобретения достигается более рациональное использование объема кузова машины путем размещения радиоаппаратуры в высвободившемся объеме, ранее занимавшемся крупногабаритными ОПУ, вдвое большим количеством механизмов, приводов (автоматических, ручных) и электроаппаратуры управления.
Объединение в одном электрическом приводе нескольких функций позволяет существенно (в несколько раз) снизить трудоемкость и стоимость изготовления ОПУ и электроаппаратуры.
ОПУ (вариант 1 фиг. 1) содержит неподвижное основание, вращающуюся платформу, механизмы подъема и вращения АС, переходную часть антенны с возможностью ее фиксации относительно платформы по крайней мере в крайних положениях.
Механизмы подъема и вращения АС ОПУ выполнены в виде системы из двух передач простой планетарной и волновой дифференциальной, генератор которой соединен с электродвигателем одним или несколькими и ручным приводом посредством одной или нескольких механических передач, одно колесо волновой передачи соединено с ее корпусом, другое с выходным валом.
Выходной вал волновой передачи посредством механической передачи одной, например конической, или нескольких передач соединен при помощи колеса-сателлита с платформой, выполненной с возможностью фиксации стопорным устройством относительно неподвижного основания.
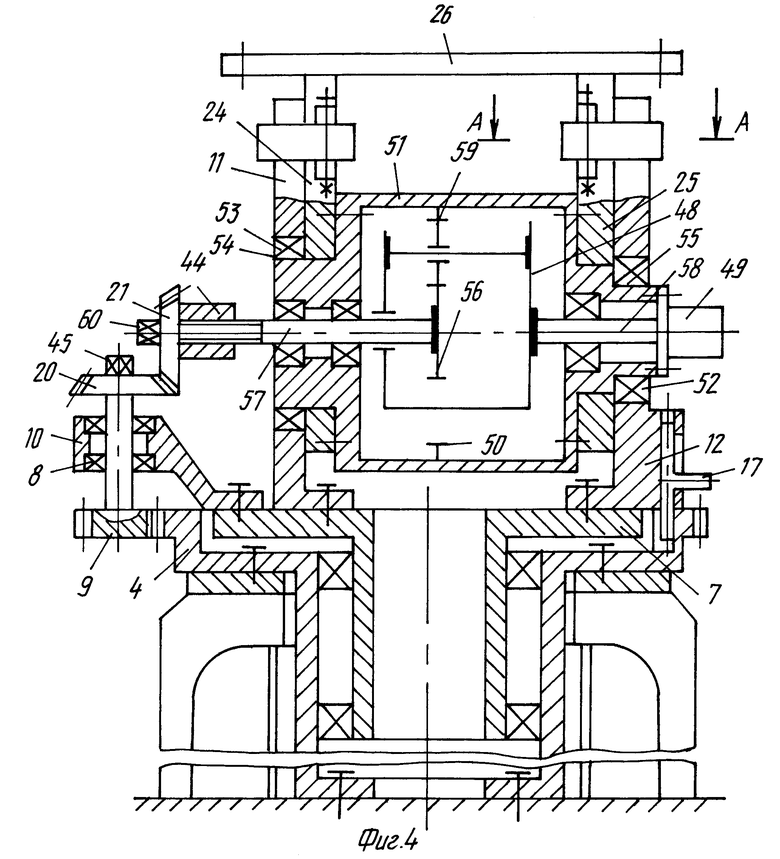
ОПУ (вариант 2 фиг. 4) содержащее неподвижное основание, вращающуюся платформу, механизмы вращения платформы и подъема антенны, переходную часть антенны с возможностью ее фиксации относительно платформы по крайней мере в рабочем положении отличается тем, что механизмы выполнены в виде системы из планетарной дифференциальной передачи (ПДП), водило которой соединено по крайней мере с одним приводом, одно ее центральное колесо соединено посредством корпуса передачи с переходной частью антенны, а другое с выходным валом, соединенным одной или несколькими механическими передачами с вращающейся платформой, которая посредством сателлита и водила и неподвижного колеса может быть зафиксирована относительно неподвижного основания стопорным устройством.
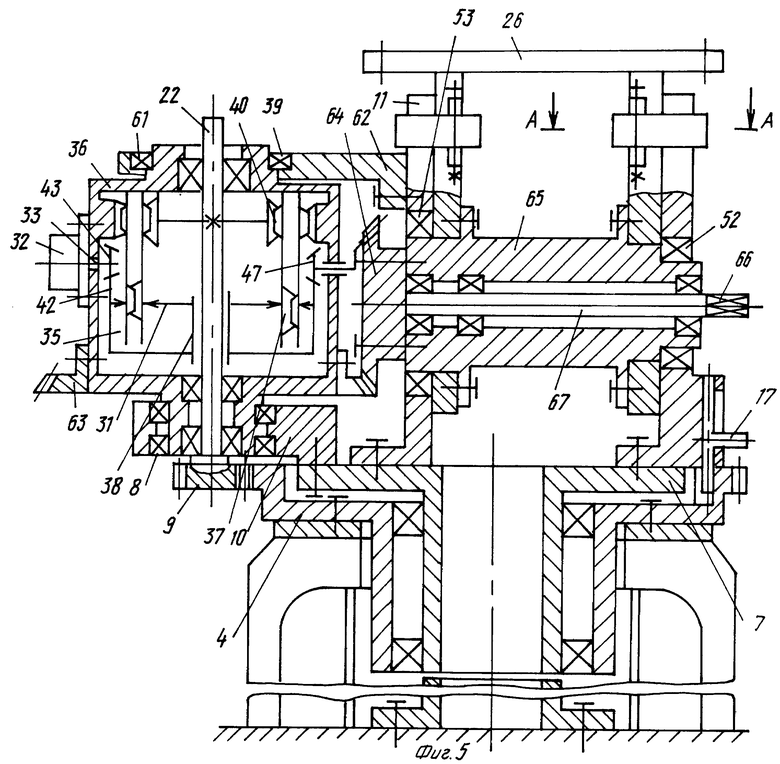
Отличительной особенностью варианта 3 фиг. 5 ОПУ является выполнение механизмов подъема и вращения АС в виде установленной вертикально волновой дифференциальной передачи, генератор волн которой соединен по крайней мере с одним приводом, одно ее колесо соединено с корпусом передачи, другое посредством ее выходного вала и механической передачи с платформой, которая может быть зафиксирована стопорными устройством. Корпус передачи соединен с валом вращения антенны одной или несколькими механическими передачами.
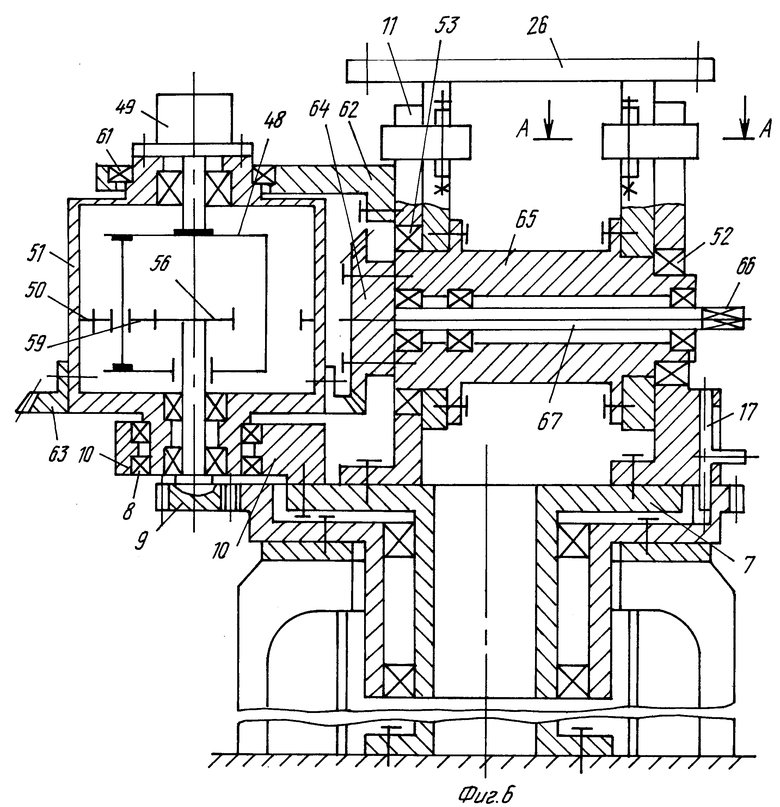
Отличительная особенность варианта 4 фиг. 6 ОПУ состоят в том, что механизмы подъема и вращения АС выполнены в виде системы из простой и планетарной дифференциальной передачи, водило которой соединено с приводом, одно ее центральное колесо соединено с корпусом передачи, а другое - посредством механической передачи с вращающейся платформой, которая фиксируется стопорным устройством относительно неподвижного основания. Корпус передачи в варианте 4 соединен с валом вращения антенны посредством одной или нескольких передач.
Фиг. 1. Конструктивная схема ОПУ с волновой дифференциальной передачей (ВДП) и креплением АС к ее корпусу (вариант 1)
Фиг. 2. Сечение А-А. Фиксация стоек переходной части антенны и опор-стоек платформы
Фиг. 3. Выносной элемент 1. Конструкция рабочего органа стопорного устройства. Стопор во впадине платформы.
Фиг. 4. Конструктивная схема ОПУ с планетарной дифференциальной передачей (ПДП) и креплением антенной системы (АС) к ее корпусу (вариант 2)
Фиг. 5. Конструктивная схема ОПУ с ВДП и соединением АС с корпусом ВДП посредством передачи (вариант 3)
Фиг. 6. Конструктивная схема ОПУ с ПДП и соединением АС с корпусом ПДП посредством передачи (вариант 4)
Механизмы подъема (развертывания) и вращения АС, их автоматизированные электрические приводы и ручные приводы, блоки управления подъемом АС, блоки аппаратуры вращения АС по выполняемым им функциям и составу являются в данном и подобных ему сложных опорно-поворотных устройствах сугубо автономными. Исключение составляют лишь выносные пульты управления, устанавливаемые в разных местах (машинах).
Однако эти события, подъем и вращение АС во времени, происходят последовательно одно за другим. Выполнение обеих функций подъема и вращения АС одним механизмом с электроприводом, ручным приводом и совмещенной электроаппаратурой управления, вытекает принципиально и возможно в большинстве случаев практически, т.к. основные параметры, например вращающие моменты и скорости подъема и вращения АС, близки по величине или совпадают, а в других случаях могут быть оптимизированы постановкой дополнительных ступеней механических передач и электродвигателей большей мощности или установкой нескольких электродвигателей. Вращающие моменты механизмов вращения и подъема в большинстве случаев находятся в пределах (150...350) кгм, скорости - (1... 20)o/сек, передаточные отношения - 4 • 104 ... 15 • 104.
ОПУ представляет собой портал прикрепленный к опорному фундаменту 1 машины и образован ребрами-шпангоутами 2, соединенным в верхней части портала опорным листом 3 сваркой (см. фиг.1).
Наружный контур ребер-шпангоутов 2 максимально приближается к внутреннему контуру поперечного сечения кузова машины. Ребра установлены между блоками или стойками радиоаппаратуры, перпендикулярно боковым и передней стенкам кузова, их ширина немного меньше глубины стоек (блоков) радиоаппаратуры и обеспечивают высокую жесткость каркасу неподвижного основания или порталу.
На опорном листе 3 неподвижного основания прикреплено болтами центральное колесо 4 простой планетарной передачи, в стакане 5 которой на разнесенных на некоторое расстояние роликоподшипниках 6 вращается платформа 7, которая выполняет роль водила простой планетарной передачи.
Цилиндрический шарнир 8 шестерни-сателлита 9 выполнен в кронштейне 10, прикрепленном к водилу-платформе 7 простой планетарной передачи.
На платформе 7 установлены две стойки-опоры 10, 12, в подшипниках 13, 14 которых установлен на выступающих хвостовиках 15, 16 волновой дифференциальный редуктор (волновая передача). Вращающаяся платформа 7 выполнена с возможностью фиксации относительно неподвижного основания посредством стопорного устройства 17, размещенного в корпусе опоры 12 платформы 7 и выполненного в виде элементарной защелки, шток 18, который входит в специальную впадину 19 центрального зубчатого колеса 4 планетарной передачи, благодаря чему появляется возможность получить планетарную простую передачу с остановленным водилом или остановленной от вращения платформой 7, шестерней-сателлитом 9, а также застопорить шестерни 20, 21 и выходной вал 22 волновой передачи для осуществления операции опускания АС в походное положение или подъема (развертывания) АС в рабочее положение.
Для осуществления подъема - опускания АС замки 23, прикрепленные к стойкам 24, 25 переходной части 26 АС должны находится в соответствующем положении.
При опускании АС в походное положение замки 23 должны быть открыты и для обеспечения вращения АС замки 23 должны быть закрыты и находиться в состоянии, изображенном на фиг. 2. Замок 23 для фиксации стоек 12, 25 и 11, 24 переходной части 26 антенны АС и платформы 7 выполнен в виде откидывающейся струбцины 27, установленной на оси 28, которая в свою очередь запрессована в проушины 29, прикрепленные к стойкам 24, 25 переходной части 26 антенны. Для осуществления плотного (без зазора) прижатия стоек 12 к 25 и 11 к 24 служат болты 30, ввинченные в струбцину 27. Стопорным устройством могут быть простые защелки или тяговые электромагниты, а также дисковые и колодочные тормоза с короткоходовым плунжерным электромагнитом с соответствующими им необходимыми конструктивными элементами на платформе (торцевые, цилиндрические поверхности торможения, пазы, шейки, диски).
При работе стопорного устройства в автоматическом режиме возможно применение тормозных электромагнитов постоянного тока, более плавных в работе по сравнению с электромагнитами переменного тока и допускающих большее число включений в час (200) с ходом якоря 28 мм, например, электромагнита ЭМО-1-66У2, а также электромагнитов серии МИС, КМТ, КМП и др.
Рабочий орган (плунжер, шток) 18 стопорного устройства 17 выполняется с наконечником или концом, имеющими одинаковую конусность с двух сторон и роликами 31, выступающими своими поверхностями (образующими) за пределы этих наклонных поверхностей (см. фиг. 3).
Паз-впадина 19 платформы 7 имеет аналогичную (ответную) форму или контур в форме наконечника, который установлен для обеспечения стопорения с гарантированным зазором с тем, чтобы, используя высокую точность вывода АС (платформы), равную ± 6' по азимуту, прямой и обратный ход (расфиксация) рабочего органа с наконечником осуществлялись бы с меньшей силой трения или без трения.
Высокая точность вывода АС и вращающейся платформы 7 по азимуту обеспечивается преобразователем угла поворота в код, т.к. с преобразователя непрерывно снимается информация об угловом положении АС (платформы) в виде 14-ти разрядного кода с выходом платформы 7 с помощью системы управления вращением с электроприводом на координату по азимуту расположения оси стопорного устройства 17 с предельно возможной точностью.
Механизмы подъема и вращения АС ОПУ выполнены в виде единой неразрывной системы из двух передач планетарной и волновой дифференциальной.
Генератор или блок генераторов 31 соединен с электродвигателем 32 одним или несколькими и ручным приводом посредством валов 33, 34 и одной или нескольких механических передач. Одно колесо 35 волновой передачи соединено с ее корпусом 36, другое колесо 37 с выходным валом 22.
Выходной вал 22 волновой передачи посредством шестерен 21, 20 соединен с платформой 7 при помощи колеса-сателлита 9.
Блок генераторов 31 установлен в шарнире 38 на выходном валу 22 и взаимодействует с двумя деформируемыми колесами 35, 37.
Наружное гибкое колесо 35 соединено волновым соединением 39 с корпусом волновой передачи 36. Внутреннее гибкое колесо 37 соединено волновым соединением 40 с выходным валом 22 и закреплено на нем.
Ручной привод состоит из рукоятки 41, надеваемой на вал шестерни 34, находящейся в постоянном зацеплении с колесом 42, с которым при помощи шестерни 43 и вала 33 соединен электродвигатель 32 ОПУ.
Ручной привод вращения АС в варианте 1 может быть получен также путем расцепления шестерни 21 с шестерней 20, с помощью гайки 44 и вращением квадратного хвостовика 45 шестерни-сателлита 9.
Труба 46 в ОПУ служит для получения и монтажа узла скрутки электрических высокочастотных и низкочастотных проводов и кабелей, проходящих через центральное отверстие платформы 7 при ее неполнооборотном (части полного оборота) вращении.
Отличительной особенностью ОПУ варианта 1 является возможность обеспечения смазки окунанием и интенсивного отвода тепла из зоны зацеплений и охлаждения передачи в целом.
Кинематическая цепь звеньев подъема АС варианта 1 при остановленных платформе 7 и гибком выходном звене 37, передающая крутящий момент от электродвигателя 32 к корпусу 36 ВПП включает: электродвигатель 32 - вал 33, пару конических колес 43, 42, генератор волн 31, зубчатое колесо 35, соединенное с корпусом 36 волновой передачи посредством волнового соединения 39. Кинематическая цепь звеньев вращения АС варианта 1 при остановленном зубчатом колесе 35, соединенным с корпусом 36 посредством замков 23, передает крутящий момент от электродвигателя 32 к платформе 7 включает: электродвигатель 32, вал 33, пару конических колес 43, 42, генератор волн 31, зубчатое колесо 37, соединенное с выходным валом 22 посредством волнового соединения 40, пару конических колес 21, 20, зубчатое колесо 9 и зубчатое колесо 4, соединенное жестко с неподвижным основанием.
Кинематическая цепь ручного привода подъема АС в варианте 1 ОПУ, передающая вращающий момент, включает в себя при остановленных платформе 7 и гибком выходном звене 37 следующие звенья: рукоятка 41 квадратный хвостовик вала 34 является элементом, к которому приложен вращающий момент, далее - пара конических колес 47, 42, генератор волн 31, зубчатое колесо 35, соединенное с корпусом 36 волновой передачи, к которому прикреплена переходная часть 26 антенны при помощи стоек 24, 12. Кинематическая цепь звеньев ручного привода вращения АС в варианте 1 ОПУ при остановленном зубчатом колесе 35, соединенным с корпусом 36 волновой передачи, передающая вращающий момент, включает в себя следующие звенья: квадратный хвостовик вала 34 является элементом, к которому приложен вращающий момент, далее пара конических колес 47, 42, генератор волн 31, выходное гибкое зубчатое колесо 37, соединенное посредством волнового соединения 40 с выходном валом 22, пару конических колес 21, 20, зубчатое колесо 9 и зубчатое колесо 4, соединенное с неподвижным основанием, подшипники 8, кронштейн 10 вращающейся платформы 7.
Отличительной особенностью конструкции ОПУ варианта 2 является выполнение механизмов, подъема и вращения в виде системы дифференциальной планетарной передачи и простой планетарной передачи, сателлит 9 которой соединен с неподвижным колесом 4, закрепленным жестко на неподвижном основании и установлен в цилиндрическом шарнире 8 опоры 10, закрепленной на вращающейся платформе 7.
Водило 48 дифференциальной передачи соединено с приводом ручным (на чертеже не показан) и электродвигателем 49.
Одно ее центральное колесо 50 соединено посредством корпуса 51 передачи, установленного в шарнирах 52, 53 стоек 11, 12 платформы 7, посредством выступов 54, 55: переходной частью 26 антенны, а другое колесо 56 соединено с выходным валом 57, который посредством конических колес 21, 20, шестерни 9 неподвижного колеса 4 вращает платформу 7, которая выполнена с возможностью фиксации при помощи стопорного устройства 17 относительно неподвижного основания.
Кинематическая цепь звеньев подъема АС при остановленных платформе 7 и центральном колесе 57, передающая крутящий момент от электродвигателя 49 к валу АС, т. е. к корпусу 51, включает: электродвигатель 49, вал 58, водило 48, сателлит 59, центральное колесо 50, корпус 51, стойки 24, 25, переходную часть 26 антенны. Кинематическая цепь звеньев вращения АС при остановленном центральном колесе 57, т.е. закрепленных корпусе 51 и колесе 50, передает крутящий момент от электродвигателя 49 к колесу 8 и включает: электродвигатель 49, вал 58, водило 48, сателлит 59, колесо 56, вал 57, пару колес 21, 20, пару колес 9, 4, кронштейн 10, платформу 7.
Кинематическая цепь звеньев ручного привода подъема АС в варианте 2 ОПУ, передающая вращающий момент, включает в себя следующие звенья (при застопоренной платформе 7 и выведенном из зацепления при помощи гайки 44 колеса 21): квадратный хвостовик 60, вал 57, колесо 56, сателлит 59, колесо 50, корпус 51, стойки 24, 25 и переходная часть 26 антенны.
Кинематическая цепь звеньев ручного привода вращения АС в варианте 2 ОПУ (при зафиксированных замках 23, вале 57 при выведенном из зацепления колеса 21) включает: квадратный хвостовик 45, колеса 9, 4, кронштейн 10 и платформу 7.
В варианте 3 ОПУ фиг. 5 механизмы подъема и вращения выполнены в виде системы, состоящей из простой планетарной передачи и соединенной с ней последовательно волновой дифференциальной передачи, установленной в вертикальном положении в шарнирах 8, 61, опоры которых закреплены в кронштейнах 10, 62, закрепленных на вращающейся платформе 7 и стойке 11.
Одновенцовый сателлит 9 простой планетарной передачи соединен с неподвижным колесом 4, закрепленным жестко на неподвижном основании.
Генератор волн 31 (блок генераторов) волновой передачи установлен в шарнире 38 (на выходном валу 22) передачи (на вращающейся оси колеса-сателлита - планетарной передачи), соединен посредством конических колес 42, 43 и вала 33 с электродвигателем 32, а при помощи пары конических колес 42, 47, вала 34 с квадратным хвостовиком с рукояткой 41 ручного привода. Внешнее деформируемое зубчатое колесо 35 волновой передачи соединено с переходной частью 26 антенны посредством волнового соединения 39, ее корпуса 36, установленного в шарнирах 8, 61 на цилиндрических шейках-выступах 15, 16 зубчатого конического колеса 63, закрепленного на ее корпусе 36, и зубчатого конического колеса 64, закрепленного на валу 65 переходной части 26 антенны.
Внутреннее деформируемое зубчатое колесо 37 волновой передачи соединено посредством волнового соединения 40, вала 22, колеса-сателлита 9, неподвижного колеса 4, шарниров 8, 61, установленных в кронштейнах 10, 62 с вращающейся платформой 7, которая выполнена с возможностью фиксации стопорным устройством 17 относительно неподвижного основания.
Ручной привод в варианте 3 ОПУ может быть образован (получен) кинематической цепью звеньев вращения АС - квадратный хвостовик 66 вала 67, колеса 64, 63, корпус 36, волновое соединение 39, волновое зацепление деформируемых колес 35, 37, волновое соединение 40, вал 22, колесо-сателлит 9, неподвижное зубчатое колесо 4, закрепленное на неподвижном основании, шарнир 8, кронштейн 10, вращающаяся платформа 7 (при этом стопорное устройство 17 с неподвижным колесом 4 не соединено, а блок 31 генераторов зафиксирован относительно корпуса 36 волновой передачи, а колесо 64 не соединено с валом 65).
При применении предварительной ступени с ВДП кинематические цепи от электродвигателя до звеньев, воспринимающих внешние нагрузки непосредственно, являются самотормозящими и таким образом генератор волн становится остановленным и может быть получен механизм передачи вращения с передаточным отношением iгж н между жестким и гибким звеньями волновой передачи iгж н = Zг/Zж; или с отношением чисел зубьев пары деформируемых зубчатых колес, соединенных с корпусом и выходным валом.
Вышеизложенное определяет возможность относительного вращения АС и платформы при остановленном генераторе без поломок и деформации зубьев в случае силового воздействия на эти звенья при фиксации АС в верхнем (рабочем) положении посредством стопорных устройств (замков) 23 или переводе АС в походное положение. В вариантах 1, 3 ОПУ с ВДП АС переходной частью 26 антенны прикреплена к корпусу 36 ВДП. При применении в ВДП одноволнового генератора и предварительной ступени из колес 43, 42 передаточное отношение кинематической цепи вращения АС электродвигатель-платформа составит 4 • 103, а передаточное отношение кинематической цепи подъема АС (электродвигатель - переходная часть антенны) составит 2,8 • 103.
В ОПУ вариант 4, фиг. 6 механизмы подъема и вращения АС выполнены в виде системы из дифференциальной планетарной передачи и простой планетарной передачи, одновенцовый сателлит 9 которой соединен с неподвижным колесом 4, закрепленным жестко на неподвижном основании, и установлен в цилиндрическом шарнире 8 опоры 10, установленной на вращающейся платформе 7. Водило 48 дифференциальной передачи соединено с приводом (электродвигателем 49). Для получения ручного привода в состав кинематической цепи может быть введена дополнительная зубчатая передача (на чертеже не показана), одно колесо которой установлено на валу водила, а другое на оси, установленной на корпусе 51 дифференциала. Центральное колесо 50 передачи соединено с переходной частью 26 антенны посредством установленного в шарнирах 8, 61 кронштейнов 10, 62, вращающейся платформы 7 корпуса 51 передачи и пары конических колес 63, 64 или цилиндро-конической пары, закрепленных на ее корпусе 51 и на валу 65 вращения переходной части антенны. Другое центральное колесо 56 дифференциальной передачи посредством центрального колеса 4 простой планетарной передачи, установленного жестко на неподвижном основании, сателлита 9 и опоры-водила 10 приводит во вращение платформу 7, выполненную с возможностью ее фиксации стопорным устройством 17 относительно неподвижного основания.


Опорно-поворотное устройство (ОПУ) относится к поворотным опорам антенных систем (АС) с механизмами их подъема и вращения, устанавливаемым на подвижных средствах, например автомашинах, а также к ОПУ спутникового телевидения и измерительных антенных систем. ОПУ имеет в своем составе неподвижное основание, вращающуюся платформу, механизм вращения платформы вокруг вертикальной оси и подъема АС относительно горизонтальной оси с помощью электропривода и ручных приводов. Механизм вращения и подъема АС выполнены в виде системы соединенных последовательно планетарной и волновой дифференциальной передач. Одна часть этой системы передач используется для передачи вращающего момента от электродвигателя и ручного привода, вторая и третья части системы ответственны за подъем и вращение АС путем фиксации АС или платформы стопорными устройствами. В изобретении решена задача совмещения функций двух механизмов подъема и вращения, ранее выполнявшихся автономными механизмами в одной системе передач, и исключения из состава ОПУ одного из них. Предложенное техническое решение позволяет более рационально использовать полезный объем подвижного средства снизить существенно трудоемкость и стоимость изготовления ОПУ, упростить конструкции механизмов подъема, вращения, ручных приводов, аппаратуры управления, уменьшить их количество, вес и габариты, а также в 2 раза количество электродвигателей в ОПУ. 4 c.п. ф-лы, 6 ил.
| US 3412404 A, 19.11.68 | |||
| 0 |
|
SU314468A1 | |
| Способ получения гидроксииодантрахинонов | 1985 |
|
SU1286589A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОНЦЕНТРАТА САПРОПЕЛЯ | 1992 |
|
RU2005478C1 |
