Изобретение относится к деталям машин и может быть использовано в качестве приводов изделий авиационной и ракетной техники.
Известен дублированный волновой привод, содержащий корпус, установленную в нем волновую передачу с неподвижным гибким колесом, два электродвигателя и установленный неподвижно относительно жесткого колеса выходной вал [1]. На валах электродвигателей установлены шестерни, связанные с генератором волн через зубчатое колесо. Недостатком этого привода являются значительные радиальные габариты, что вызвано параллельной установкой электродвигателей.
Этого недостатка лишен дублированный волновой привод, содержащий корпус, установленные в нем две волновые передачи с неподвижным гибким колесом, а также два соосно размещенных и обращенных валами друг к другу электродвигателя, выбранный в качестве прототипа [2]. Генераторы волн волновых передач установлены на валах электродвигателей, при этом один из электродвигателей размещен внутри выходного вала привода. Соосное размещение электродвигателей позволяет снизить осевые габариты привода.
Недостатком такого дублированного волнового привода являются ограниченный угол поворота выходного вала и низкий ресурс, вызванные вращением одного из электродвигателей вместе с выходным валом, что приводит к скручиванию кабеля этого электродвигателя и износу изоляции жил этого кабеля с последующим их замыканием.
Техническим результатом, достигаемым с помощью заявленного изобретения, является увеличение угла поворота выходного вала и повышение ресурса.
Этот результат достигается за счет того, что в известном волновом приводе, содержащем корпус, установленную в нем волновую передачу с неподвижным гибким колесом, а также два соосно размещенных и обращенных валами друг к другу электродвигателя и установленный неподвижно относительно жесткого колеса выходной вал, при этом один из электродвигателей размещен внутри выходного вала, согласно изобретению корпус снабжен размещенным внутри гибкого колеса кольцевым кронштейном, на свободном конце которого выполнен фланец, электродвигатели закреплены на противоположных торцах фланца, а генератор волн установлен в подшипниках на наружной поверхности кронштейна, при этом на валах электродвигателей закреплены шестерни с одинаковыми параметрами зубчатых венцов, на генераторе волн закреплено неподвижно зубчатое колесо внутреннего зацепления, а во фланце выполнено n (n = 1, 2 и т.д.) вырезов, в которых на осях установлены n сателлитов соответственно, находящихся в зацеплении с обеими шестернями и зубчатым колесом, и во фланце выполнен канал для кабеля электродвигателя, размещенного внутри выходного вала. Для повышения вибропрочности дублированного волнового привода в условиях виброперегрузок, характерных для ракетной техники, размещенный внутри выходного вала электродвигатель может быть зафиксирован в радиальном направлении относительно выходного вала посредством подшипника, установленного на внутренней поверхности выходного вала. Размещение внутри гибкого колеса кольцевого кронштейна корпуса, на свободном конце которого выполнен фланец, и закрепление электродвигателей на противоположных торцах фланца позволяет обеспечить неподвижное положение обоих электродвигателей относительно корпуса. Установка генератора волн в подшипниках на наружной поверхности кронштейна совместно с закреплением на валах электродвигателей шестерен с одинаковыми параметрами зубчатого венца, закреплением на генераторе волн неподвижно зубчатого колеса внутреннего зацепления и выполнением во фланце n (n = 1, 2 и т.д.) вырезов, в которых на осях установлены n сателлитов соответственно, находящихся в зацеплении с обеими шестернями и зубчатым колесом, позволяет передавать движение от каждого электродвигателя к волновой передаче. Выполнение во фланце канала для кабеля электродвигателя, размещенного внутри выходного вала, позволяет повысить надежность за счет неподвижной установки кабеля и устранения возможности его контакта с подвижными деталями привода, что увеличивает угол поворота выходного вала до любого значения и повышает ресурс привода. Следовательно, заявленное устройство соответствует критерию "изобретательский уровень".
На чертеже приведен пример конкретного выполнения дублированного волнового привода, продольный разрез.
Дублированный волновой привод содержит корпус 1 и установленную в нем волновую передачу 2 с неподвижным гибким колесом 3 и жестким колесом 4, выполненным заодно с выходным валом 5, установленным в корпусе 1 на подшипниках 6 и 7 (поскольку возможно и другое соединение жесткого колеса с выходным валом, например, посредством крепежных деталей, в формуле использован обобщающий признак "установленный неподвижно относительно жесткого колеса выходной вал". Конец 8 гибкого колеса 3 закреплен на корпусе 1 посредством шлицевого соединения. Корпус 1 снабжен размещенным внутри гибкого колеса 3 кольцевым кронштейном 9, на свободном конце которого выполнен фланец 10, на противоположных торцах фланца 10 закреплены электродвигатели 11 и 12, которые размещены соосно и обращены валами друг к другу, при этом электродвигатель 12 размещен внутри выходного вала 5. На наружной поверхности кронштейна 9 установлен кулачковый генератор волн 13 в подшипниках 14. На валах электродвигателей 11 и 12 закреплены шестерни 15 и 16 соответственно с одинаковыми параметрами зубчатого венца, а на генераторе волн 13 выполнено зубчатое колесо 17 внутреннего зацепления (поскольку возможно и другое соединение зубчатого колеса с генератором волн, например, посредством крепежных деталей, в формуле использован обобщающий признак "закреплено неподвижно"). Во фланце 10 выполнен вырез 18, в котором на оси 19 установлен сателлит 20, находящийся в зацеплении с обеими шестернями 15 и 16 и зубчатым колесом 17. В общем случае могут быть выполнены n (n = 1, 2 и т.д.) вырезов и сателлитов, конкретное число их определяется исходя из прочностного расчета зубчатого зацепления. Во фланце 10 выполнен канал 21 для кабеля 22 электродвигателя 12. Электродвигатели 11 и 12 закреплены на фланце 10 посредством винтовых соединений 23. Электродвигатель зафиксирован в радиальном направлении относительно выходного вала 5 посредством подшипника 24, установленного на внутренней поверхности выходного вала 5 и на кольце 25, соединенном с фланцем электродвигателя 12 и фланцем 10 винтовыми соединениями 23. Питание электродвигателя 11 осуществляется через его кабель 26.
Волновой привод работает следующим образом: при включении электродвигателей 11 и 12 (они подключены так, что направления их вращения противоположны) шестерни 15 и 16 через сателлит 20 и зубчатое колесо 17 передают движение генератору волн 13, который, создавая в гибком колесе 3 волну деформации, заставляет вращаться жесткое колесо 4 и выходной вал 5. В случае отказа одного из электродвигателей (например, 11) вращение выходного вала осуществляется от электродвигателя 12, который своей шестерней 16 заставляет вращаться сателлит 20, зубчатое колесо 17 и через шестерню 15 вал электродвигателя 11. Такая схема дублирования широко известна, она применяется, например, в [1]. В процессе функционирования оба электродвигателя 11 и 12, а также их кабели 22 и 26 неподвижны (при любом значении угла поворота выходного вала 5) и защищены от контакта с вращающимися деталями привода, что увеличивает угол поворота выходного вала и повышает ресурс привода. Поскольку масса электродвигателей 11 и 12 довольно значительна, а кронштейн 9 имеет значительную длину, для повышения вибропрочности привода установлен подшипник 24 с целью устранения консольной нагрузки на кронштейн 9. Т.к. повышение вибропрочности может быть достигнуто и другими средствами (например, увеличением сечения кронштейна 9), то установка подшипника, не являясь обязательной, все-таки предпочтительна при использовании в изделиях авиационной и ракетной техники.
Указанные преимущества - увеличение угла поворота выходного вала и повышение ресурса - позволяют рекомендовать заявленное техническое решение к использованию в агрегатах авиационной и космической техники.
Литература:
1. В.Н. Руденко. "Планетарные и волновые передачи", М., "Машиностроение", 1980, лист 71, рис. 4.
2. Патент США N 3986412 по кл. 74/661, 1976 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2168078C1 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2280798C2 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2168079C1 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2285162C2 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2285844C2 |
| ВОЛНОВОЙ ПРИВОД | 1999 |
|
RU2166141C1 |
| ВОЛНОВОЙ ПРИВОД | 2003 |
|
RU2267043C2 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
| ВОЛНОВОЙ ПРИВОД И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 1999 |
|
RU2165044C1 |
| ВОЛНОВОЙ ПРИВОД | 2003 |
|
RU2267677C2 |
Изобретение относится к деталям машин и может быть использовано в качестве приводов изделий авиационной и ракетной техники. Дублированный волновой привод содержит корпус (1), установленную в нем волновую передачу с неподвижным гибким колесом (3), два соосно размещенных и обращенных валами друг к другу электродвигателя (11, 12), выходной вал (5). Электродвигатель (12) размещен внутри выходного вала (5). Внутри гибкого колеса размещен кольцевой кронштейн (9), на свободном конце которого выполнен фланец (10). Электродвигатели (11, 12) закреплены на противоположных торцах фланца (10). Генератор волн (13) установлен в подшипниках (14) на наружной поверхности кронштейна (9). На валах электродвигателей (11, 12) закреплены шестерни (15, 16) с одинаковыми параметрами зубчатых венцов. На генераторе волн (13) закреплено неподвижно зубчатое колесо (17) внутреннего зацепления. Во фланце (10) выполнено n (n = 1, 2 и т.д.) вырезов (18), в которых на осях установлены n сателлитов (20) соответственно, находящихся в зацеплении с обеими шестернями (15, 16) и зубчатым колесом (17). Канал (21) для кабеля (22) электродвигателя (12) выполнен во фланце (10). Увеличен угол поворота выходного вала и повышен ресурс. 1 з.п. ф-лы, 1 ил.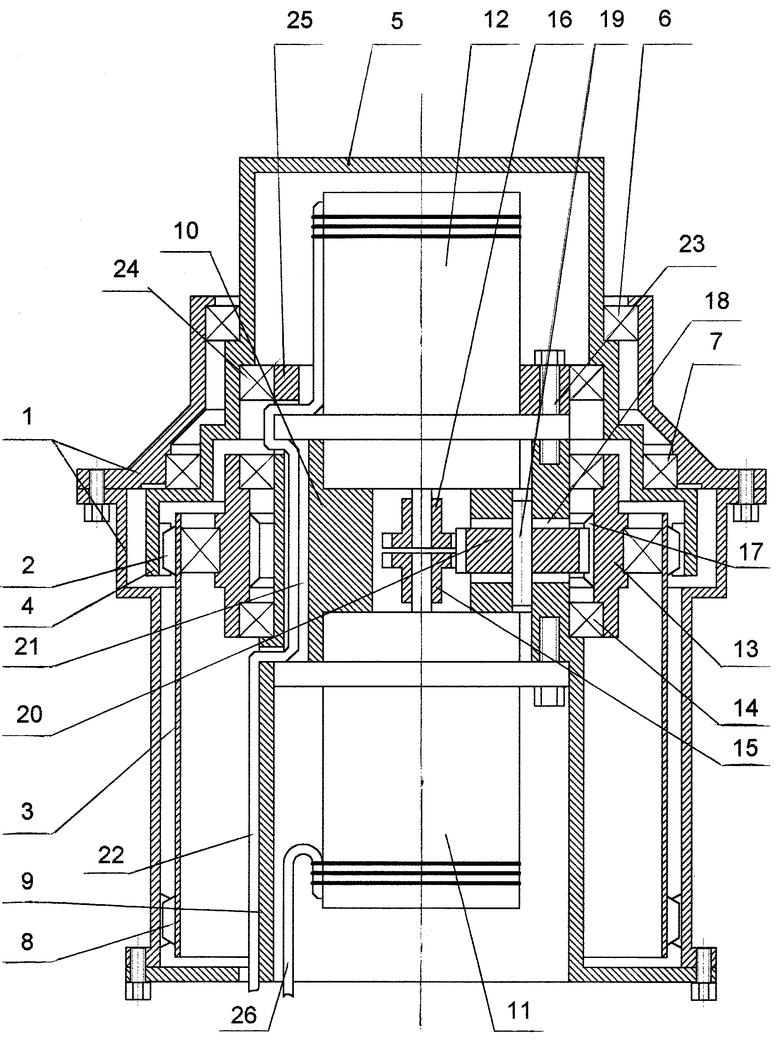
| US 3986412 A, 19.10.1976 | |||
| Волновой привод | 1988 |
|
SU1580088A1 |
